
Cloud–Fog Collaborative Computing Based Task Offloading Strategy in Internet of Vehicles


Abstract
1. Introduction
- (1)
- One forwarding vehicle predicting algorithm based on the information of the vehicle’s surrounding environment is proposed. Firstly, those vehicles that are closer to the target fog node and around the source vehicle are the candidate vehicles; then, the proposed forwarding vehicle predicting algorithm is iteratively run until there are no candidate vehicles or the predicted forwarding vehicle can reach the target fog node; that is, the optimal forwarding vehicle that can transmit the task completely to the next fog node is predicted.
- (2)
- A task offloading cost optimization problem based on cloud–fog collaborative computing in the internet of vehicles environments is constructed. Here, a V2V-assisted task forwarding mechanism is introduced, the above forwarding vehicle predicting algorithm is adopted to obtain task forwarding links; then, considering the parallel computing relationship among computing nodes, the system delay and energy consumption optimization problem is formulated.
- (3)
- A multi-strategy improved genetic algorithm (MSI-GA) is proposed to solve the above task offloading cost optimization problem. In the proposed MSI-GA, the initialization and selection operators of GA are improved, which adopt chaotic sequence initialization and Metropolis criterion; the crossover and mutation operators can adjust adaptively by their individual fitness, generations and population similarity, and Gaussian perturbation operators are also introduced to improve the local optimization ability of the algorithm.
2. System Model
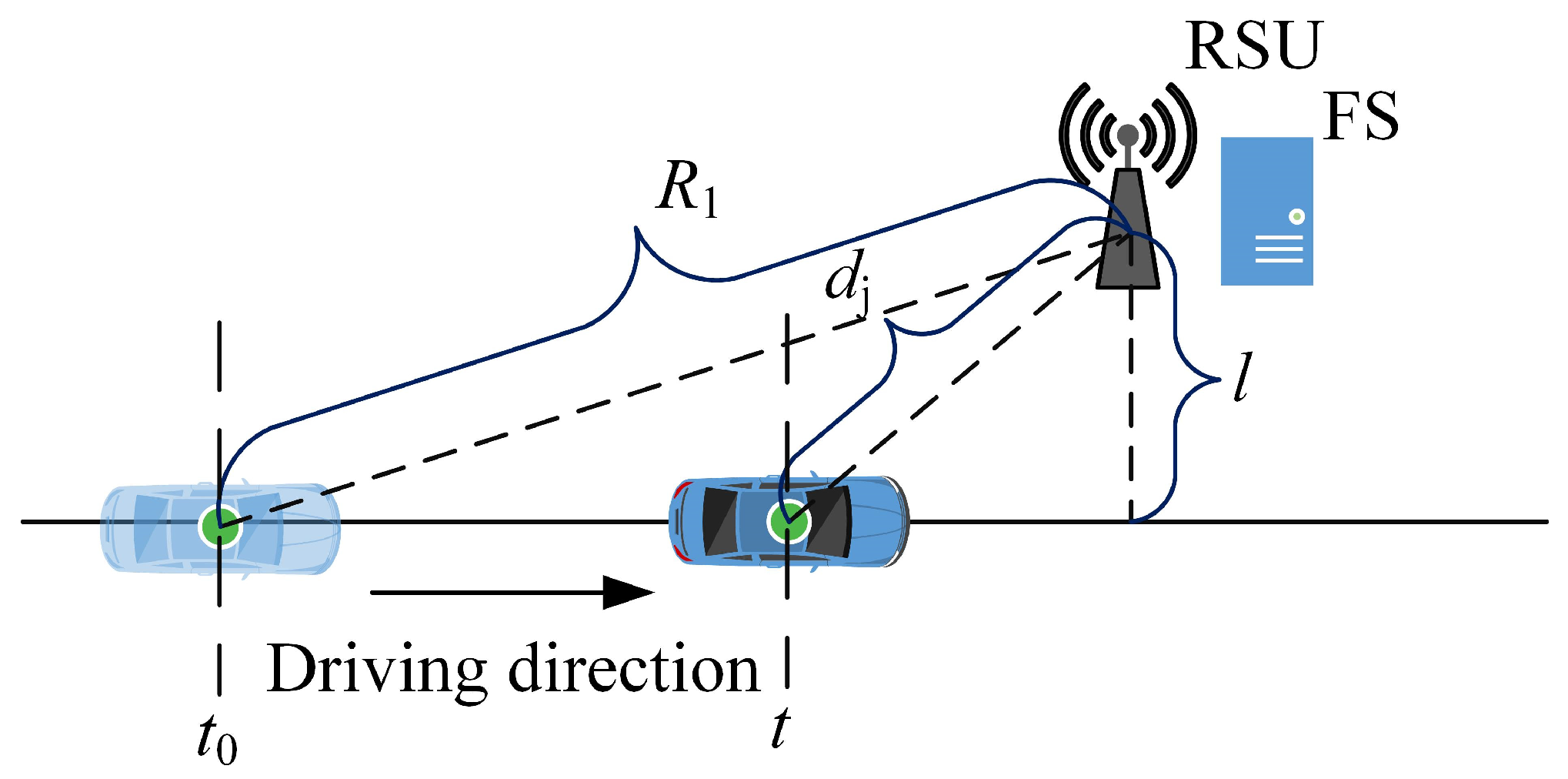
2.1. Communication Model
2.2. Delay Model
- (1)
- The transmission link between vehicle and fog server: When a task is forwarded from a vehicle to a fog node, the transmission rate of the link can be determined from Equation (3), then the transmission delay of V2F link is .
- (2)
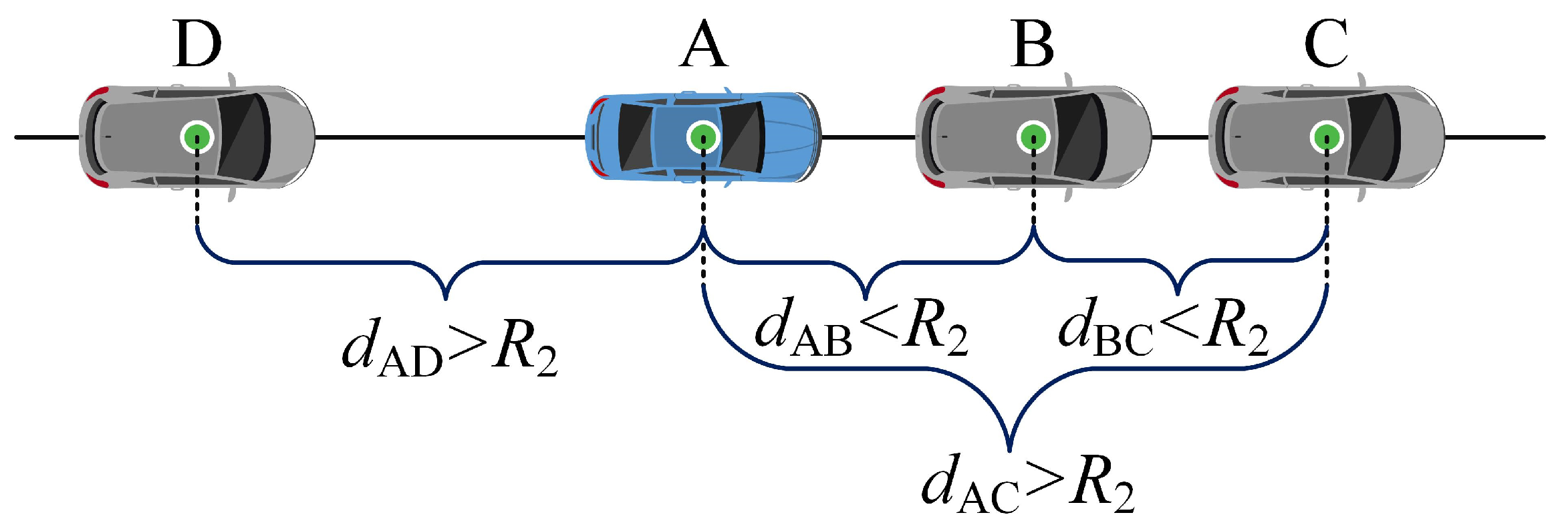
- The transmission link between vehicles: When a task is forwarded from a vehicle to a nearby vehicle, the transmission rate of the link can be determined from Equation (6), then the transmission delay of the V2V link is .
- (3)
- The transmission link between fog servers: When a task is forwarded from a fog node to an adjacent fog node, the transmission rate of the link can be determined from Equation (9), then the transmission delay of the F2F link is .
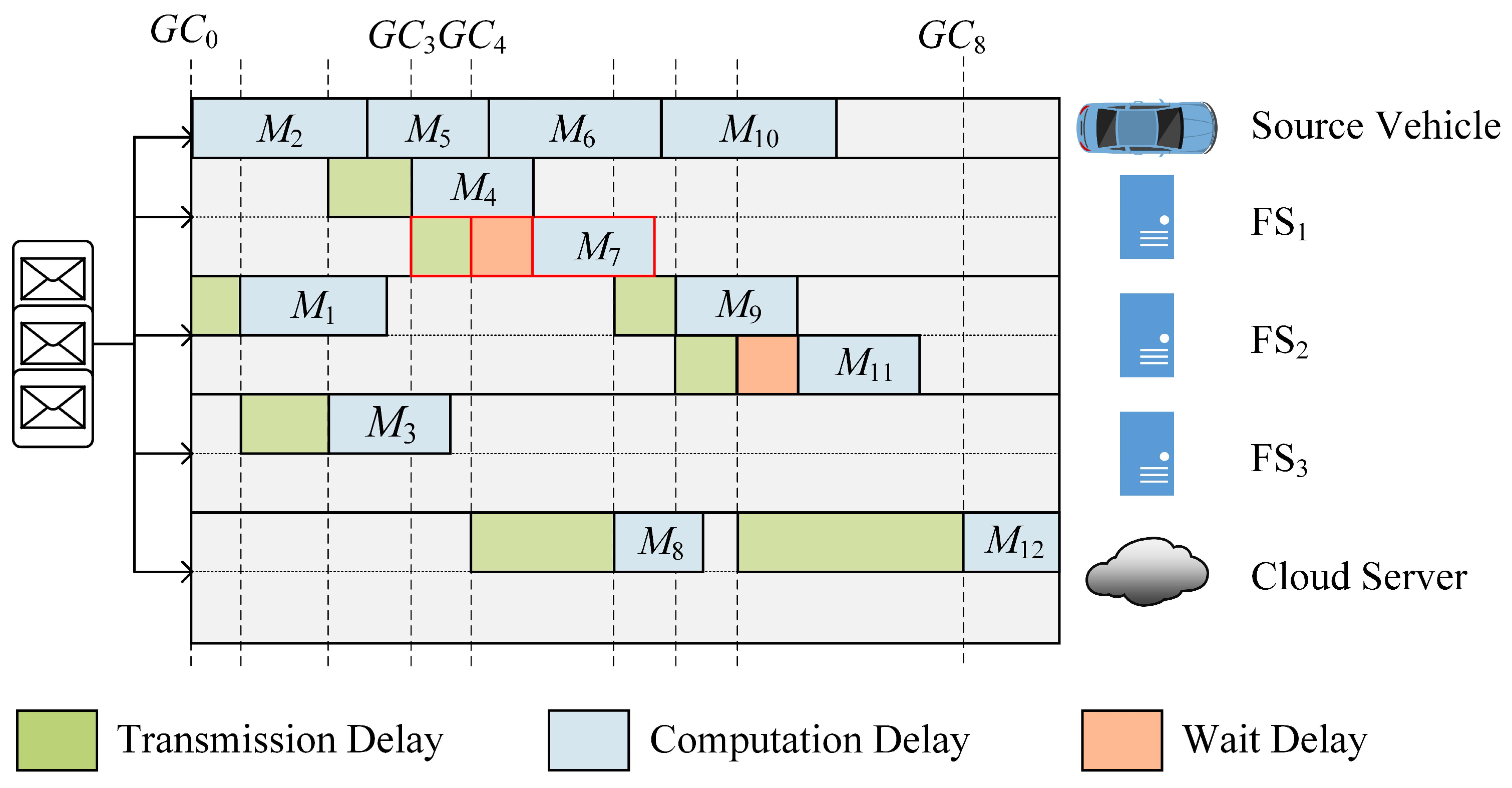
2.3. Parallel Computing Model
2.4. Energy Consumption Model
2.5. System Cost Model
3. Task Offloading Scheme
3.1. Forwarding Vehicle Predicting Algorithm Based on Environmental Information
| Algorithm 1 Forwarding vehicles predicting algorithm |
| Input: , , , , channel parameter set , , hop number , temporary hop number , target fog server , time ; Output: , ; (1) When running the algorithm for the first time, the source vehicle is initialized to forwarding vehicles, initialize , , ; (2) Obtain the set of vehicles that can communicate around forwarding vehicles; (3) if do (4) for in do (5) Calculate the existence time of the link between and , and the data transmission delay ; (6) if do (7) calculate the time of transmission fog as and time of driving out of the fog area as ; (8) if do (9) will be added to the collection of candidate vehicles; (10) end if (11) end if (12) end for (13) end if (14) if do (15) Select the nearest vehicle in the middle distance as ; (16) if the distance of after forwarding is closer to the do (17) ; (18) Located in the fog area after receiving the task is , the current fog area is ; (19) if do (20) ; (21) ; (22) end if (23) if do (24) Recursively run the algorithm; (25) end if (26) end if (27) end if |
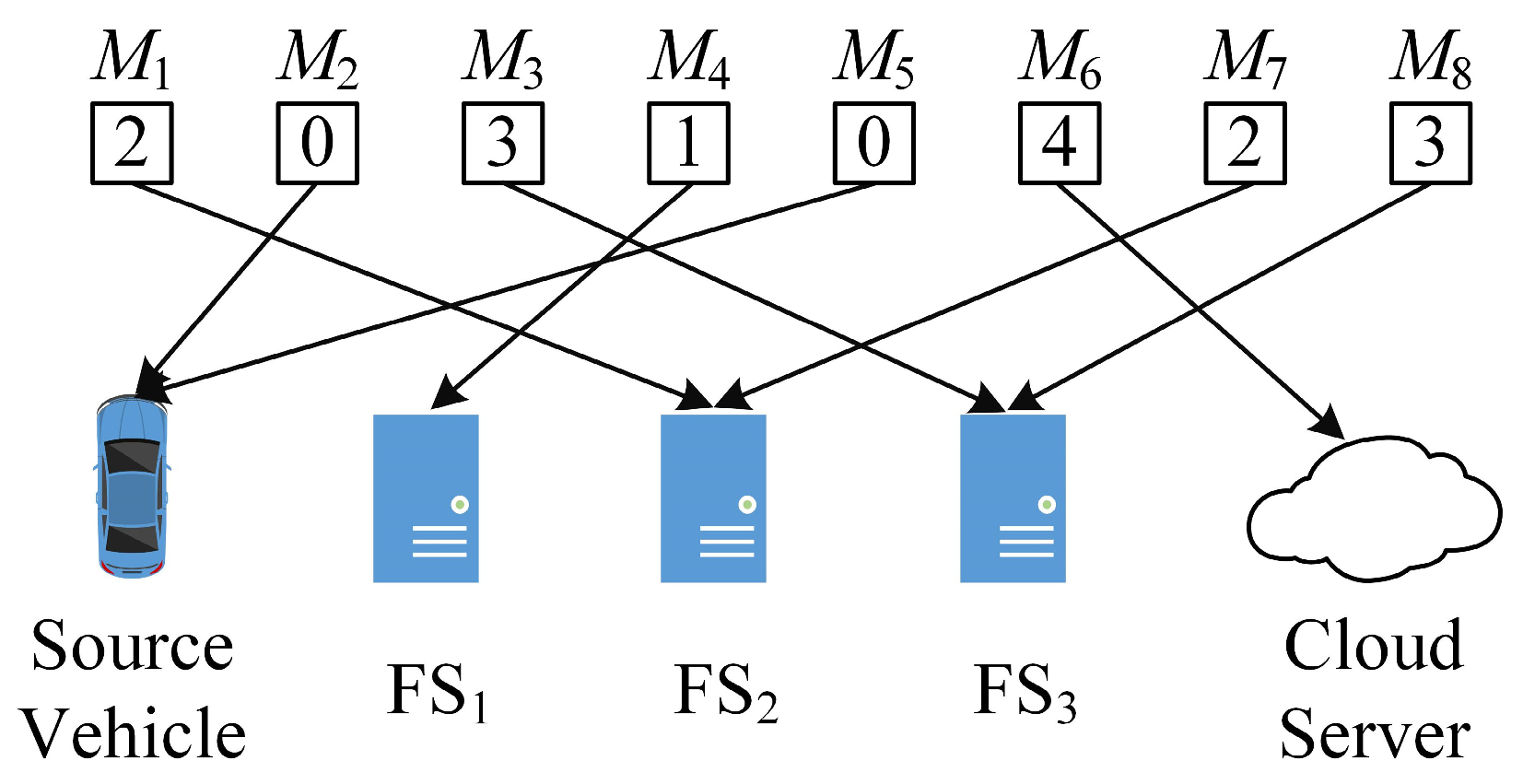
3.2. Multi-Strategy Improved Genetic Algorithm
4. Performance Evaluations and Simulation Results
- (1)
- Random offloading scheme: Tasks are randomly offloaded to the source vehicle, local fog server, adjacent fog servers and the cloud server.
- (2)
- Partial collaborative scheme: MSI-GA is employed to determine the offloading strategy for tasks, which can be offloaded to source vehicle, local fog server and the cloud server.
- (3)
- GA scheme: The genetic algorithm is employed to determine the offloading strategy for tasks, which can be offloaded to the source vehicle, local fog server, adjacent fog servers and the cloud server.
- (4)
- CGA scheme: The chaotic genetic algorithm is employed to determine the offloading strategy for tasks, which can be offloaded to the source vehicle, local fog server, adjacent fog servers and the cloud server.
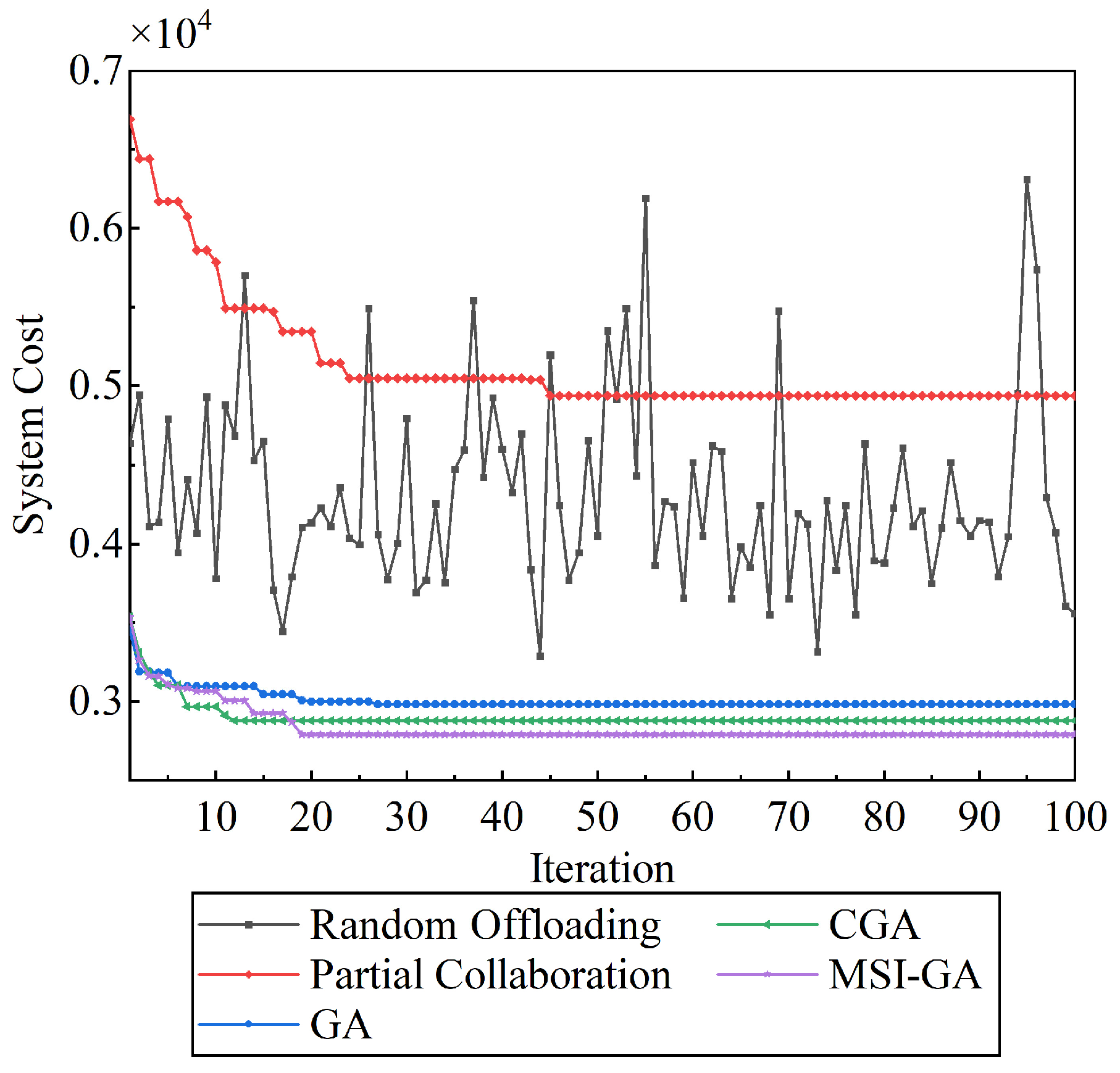
4.1. Performance Analysis Considering System Delay and Energy Consumption in Balance
4.2. Consider Performance Analysis for Single Objective
4.3. Influence the Number of Tasks on Algorithm Performance
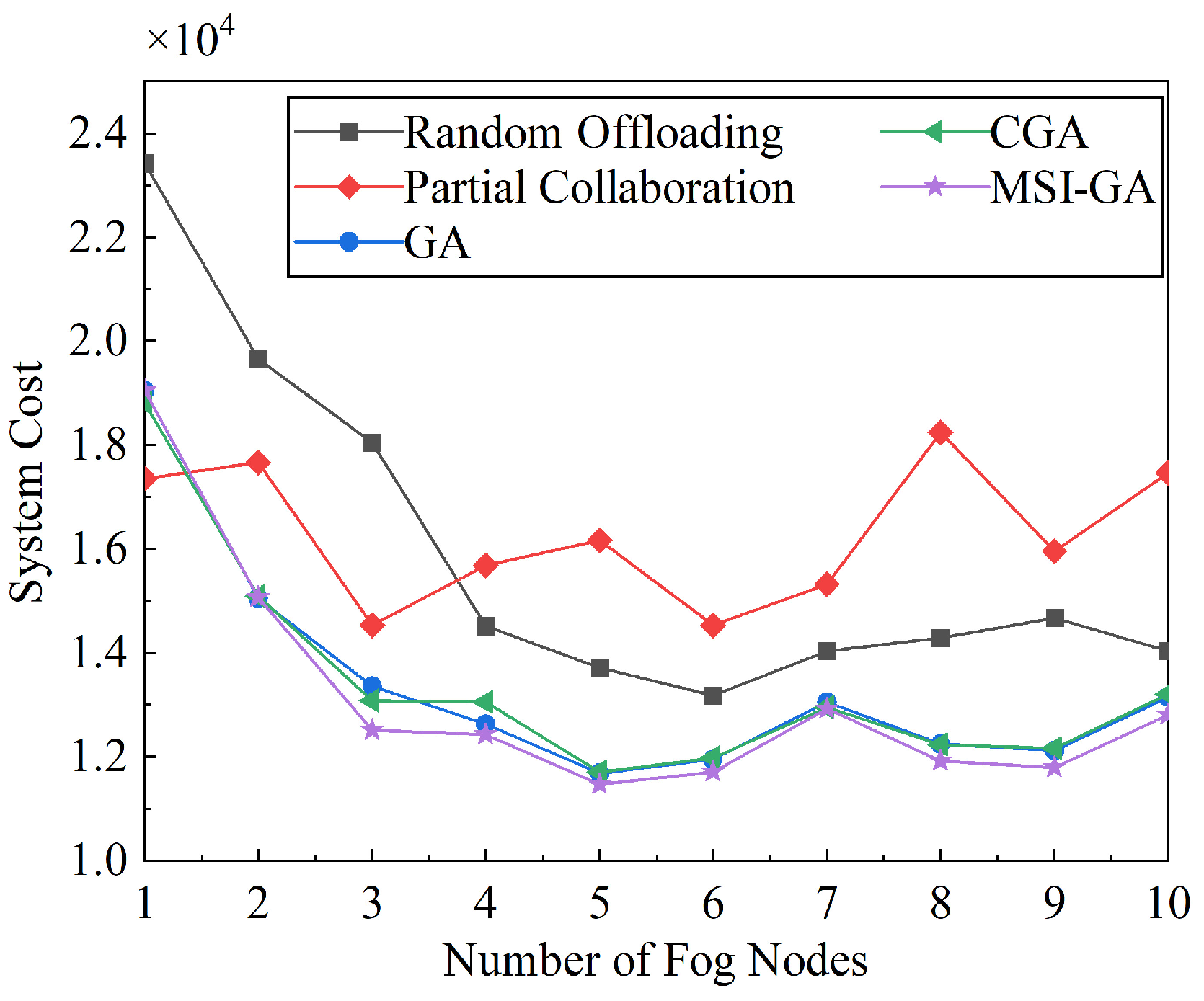
4.4. Influence of Number of Fog Nodes on Algorithm Performance
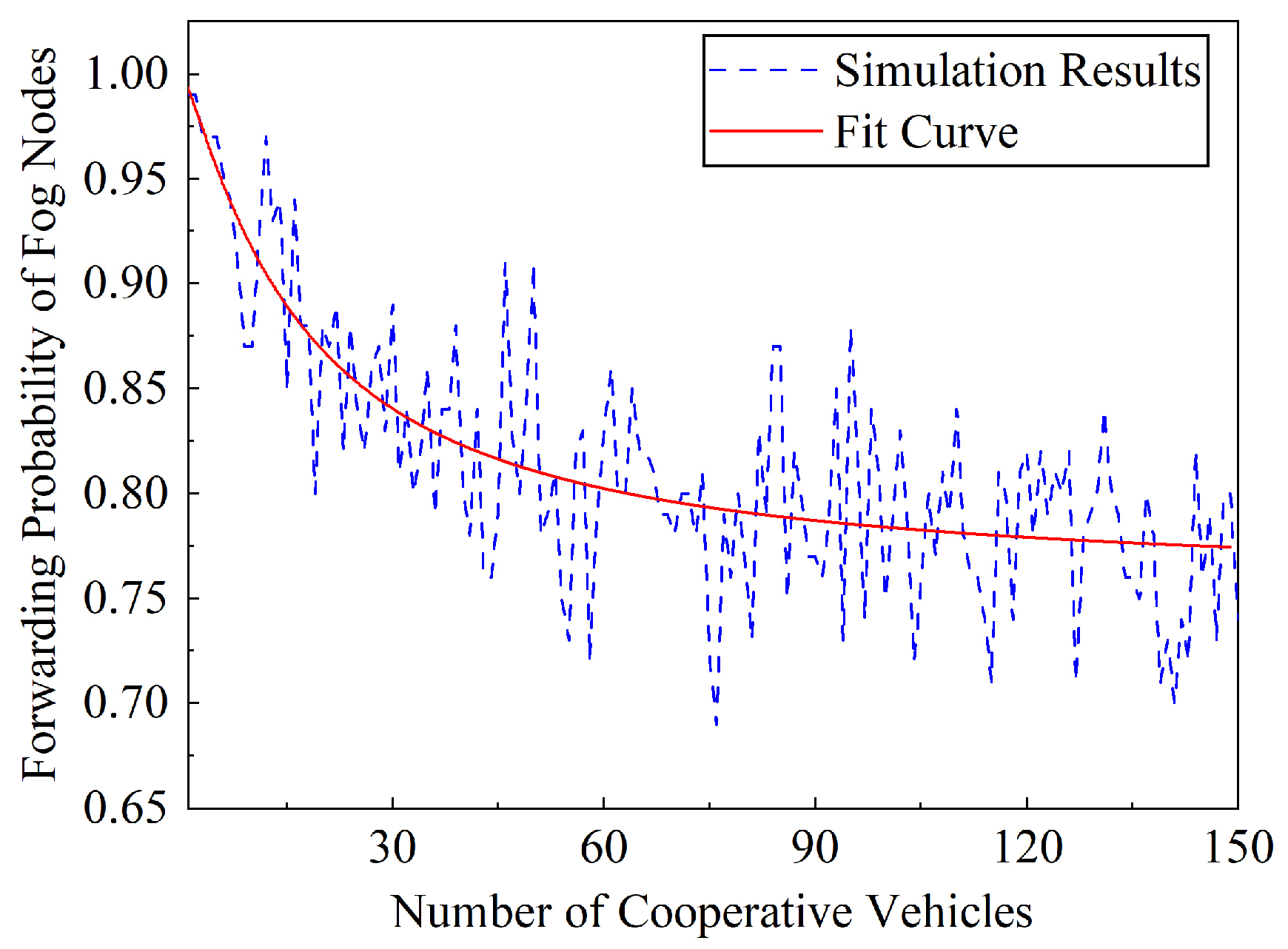
4.5. Influence of Number of Cooperative Vehicles on the Forwarding Load of Fog Nodes
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lin, S.J.; Li, Y.Y.; Han, Z.B.; Zhuang, B.; Ma, J.; Tianfield, H. Joint Incentive Mechanism Design and Energy-Efficient Resource Allocation for Federated Learning in UAV-Assisted Internet of Vehicles. Drones 2024, 8, 82. [Google Scholar] [CrossRef]
- Cao, B.; Sun, Z.H.; Zhang, J.T.; Gu, Y. Resource Allocation in 5G IoV Architecture Based on SDN and Fog-Cloud Computing. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3832–3840. [Google Scholar] [CrossRef]
- Jamil, B.; Ijaz, H.; Shojafar, M.; Munir, K.; Buyya, R. Resource Allocation and Task Scheduling in Fog Computing and Internet of Everything Environments: A Taxonomy, Review, and Future Directions. ACM Comput. Surv. 2022, 54, 1–38. [Google Scholar] [CrossRef]
- Jain, V.; Kumar, B. QoS-Aware Task Offloading in Fog Environment Using Multi-agent Deep Reinforcement Learning. J. Netw. Syst. Manag. 2023, 31, 7. [Google Scholar] [CrossRef]
- Huang, H.; Ye, Q.; Zhou, Y.T. Deadline-Aware Task Offloading with Partially-Observable Deep Reinforcement Learning for Multi-Access Edge Computing. IEEE Trans. Netw. Sci. Eng. 2022, 9, 3870–3885. [Google Scholar] [CrossRef]
- Khoobkar, M.H.; Fooladi, M.D.T.; Rezvani, M.H.; Sadeghi, M.M.G. Partial offloading with stable equilibrium in fog-cloud environments using replicator dynamics of evolutionary game theory. Clust. Comput.-J. Netw. Softw. Tools Appl. 2022, 25, 1393–1420. [Google Scholar] [CrossRef]
- Lu, W.J.; Zhang, X.L. Computation Offloading for Partitionable Applications in Dense Networks: An Evolutionary Game Approach. IEEE Internet Things J. 2022, 9, 20985–20996. [Google Scholar] [CrossRef]
- Chen, Y.; Zhao, J.; Wu, Y.; Huang, J.W.; Shen, X.M. QoE-Aware Decentralized Task Offloading and Resource Allocation for End-Edge-Cloud Systems: A Game-Theoretical Approach. IEEE Trans. Mob. Comput. 2024, 23, 769–784. [Google Scholar] [CrossRef]
- Kishor, A.; Chakarbarty, C. Task Offloading in Fog Computing for Using Smart Ant Colony Optimization. Wirel. Pers. Commun. 2022, 127, 1683–1704. [Google Scholar] [CrossRef]
- Zhu, S.F.; Cai, J.H.; Sun, E.L. Mobile edge computing offloading scheme based on improved multi-objective immune cloning algorithm. Wirel. Netw. 2023, 29, 1737–1750. [Google Scholar] [CrossRef]
- Zhang, J.; Piao, M.J.; Zhang, D.G.; Zhang, T.; Dong, W.M. An approach of multi-objective computing task offloading scheduling based NSGS for IOV in 5G. Clust. Comput.-J. Netw. Softw. Tools Appl. 2022, 25, 4203–4219. [Google Scholar] [CrossRef]
- Zhu, S.F.; Sun, E.L.; Zhang, Q.H.; Cai, J.H. Computing Offloading Decision Based on Multi-objective Immune Algorithm in Mobile Edge Computing Scenario. Wirel. Pers. Commun. 2023, 130, 1025–1043. [Google Scholar] [CrossRef]
- Long, S.Q.; Zhang, Y.; Deng, Q.Y.; Pei, T.R.; Ouyang, J.Z.; Xia, Z.H. An Efficient Task Offloading Approach Based on Multi-Objective Evolutionary Algorithm in Cloud-Edge Collaborative Environment. IEEE Trans. Netw. Sci. Eng. 2023, 10, 645–657. [Google Scholar] [CrossRef]
- Zhang, Z.R.; Wang, N.F.; Wu, H.M.; Tang, C.G.; Li, R.D. MR-DRO: A Fast and Efficient Task Offloading Algorithm in Heterogeneous Edge/Cloud Computing Environments. IEEE Internet Things J. 2023, 10, 3165–3178. [Google Scholar] [CrossRef]
- Xu, L.; Liu, Y.; Fan, B.; Xu, X.; Mei, Y.; Feng, W. An Improved Gravitational Search Algorithm for Task Offloading in a Mobile Edge Computing Network with Task Priority. Electronics 2024, 13, 540. [Google Scholar] [CrossRef]
- Sun, Y.L.; Wu, Z.Y.; Meng, K.; Zheng, Y.H. Vehicular Task Offloading and Job Scheduling Method Based on Cloud-Edge Computing. IEEE Trans. Intell. Transp. Syst. 2023, 24, 14651–14662. [Google Scholar] [CrossRef]
- Zhou, H.; Jiang, K.; Liu, X.X.; Li, X.H.; Leung, V.C.M. Deep Reinforcement Learning for Energy-Efficient Computation Offloading in Mobile-Edge Computing. IEEE Internet Things J. 2022, 9, 1517–1530. [Google Scholar] [CrossRef]
- Tang, M.; Wong, V.W.S. Deep Reinforcement Learning for Task Offloading in Mobile Edge Computing Systems. IEEE Trans. Mob. Comput. 2022, 21, 1985–1997. [Google Scholar] [CrossRef]
- Lee, S.S.; Lee, S. Resource Allocation for Vehicular Fog Computing Using Reinforcement Learning Combined with Heuristic Information. IEEE Internet Things J. 2020, 7, 10450–10464. [Google Scholar] [CrossRef]
- Jin, H.L.; Kim, Y.G.; Jin, Z.R.; Fan, C.Y.; Xu, Y.L. Joint Task Offloading Based on Distributed Deep Reinforcement Learning-Based Genetic Optimization Algorithm for Internet of Vehicles. J. Grid Comput. 2024, 22, 34. [Google Scholar] [CrossRef]
- Liu, L.; Feng, J.; Mu, X.; Pei, Q.; Lan, D.; Xiao, M. Asynchronous deep reinforcement learning for collaborative task computing and on-demand resource allocation in vehicular edge computing. IEEE Trans. Intell. Transp. Syst. 2023, 24, 15513–15526. [Google Scholar] [CrossRef]
- Luo, Q.Y.; Li, C.L.; Luan, T.H.; Shi, W.S. Minimizing the Delay and Cost of Computation Offloading for Vehicular Edge Computing. IEEE Trans. Serv. Comput. 2022, 15, 2897–2909. [Google Scholar] [CrossRef]
- Huang, M.X.; Zhai, Q.H.; Chen, Y.J.; Feng, S.L.; Shu, F. Multi-Objective Whale Optimization Algorithm for Computation Offloading Optimization in Mobile Edge Computing. Sensors 2021, 21, 2628. [Google Scholar] [CrossRef] [PubMed]
- Ren, Q.; Liu, K.; Zhang, L.M. Multi-objective optimization for task offloading based on network calculus in fog environments. Digit. Commun. Netw. 2022, 8, 825–833. [Google Scholar] [CrossRef]
- Duan, W.; Li, X.; Huang, Y.; Cao, H.; Zhang, X. Multi-Agent-Deep-Reinforcement-Learning-Enabled Offloading Scheme for Energy Minimization in Vehicle-to-Everything Communication Systems. Electronics 2024, 13, 663. [Google Scholar] [CrossRef]
- Labriji, I.; Meneghello, F.; Cecchinato, D.; Sesia, S.; Perraud, E.; Strinati, E.C.; Rossi, M. Mobility Aware and Dynamic Migration of MEC Services for the Internet of Vehicles. IEEE Trans. Netw. Serv. Manag. 2021, 18, 570–584. [Google Scholar] [CrossRef]
- Shu, W.N.; Li, Y. Joint offloading strategy based on quantum particle swarm optimization for MEC-enabled vehicular networks. Digit. Commun. Netw. 2023, 9, 56–66. [Google Scholar] [CrossRef]
- Shen, Q.Q.; Hu, B.J.; Xia, E.J. Dependency-Aware Task Offloading and Service Caching in Vehicular Edge Computing. IEEE Trans. Veh. Technol. 2022, 71, 13182–13197. [Google Scholar] [CrossRef]
- Zelinka, I.; Diep, Q.B.; Snasel, V.; Das, S.; Innocenti, G.; Tesi, A.; Schoen, F.; Kuznetsov, N.V. Impact of chaotic dynamics on the performance of metaheuristic optimization algorithms: An experimental analysis. Inf. Sci. 2022, 587, 692–719. [Google Scholar] [CrossRef]
- Movahedi, Z.; Defude, B.; Hosseininia, A.M. An efficient population-based multi-objective task scheduling approach in fog computing systems. J. Cloud Comput.-Adv. Syst. Appl. 2021, 10, 53. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Number of cooperative vehicles | 1–150 |
| Vehicle speed/(km·h−1) | 40~120 |
| V2V Max communication distance/m | 100 |
| Computing capacity of vehicle (cyc·s−1) | 4 × 108~5 × 108 |
| Number of fog servers | 1~10 |
| Fog server coverage radius/m | 500 |
| Vertical distance of fog server from road/m | 20 |
| Computing capacity of fog server (cyc·s−1) | 7 × 108~8 × 108 |
| Computing capacity of cloud server (cyc·s−1) | 1 × 1010 |
| Number of tasks | 50~250 |
| Task data size/Mb | 0~50 |
| Task computation size/cyc | 3 × 108~5 × 108 |
| Path loss factor | 2 |
| Link fading factor | 4 |
| Bandwidth between fog servers/MHz | 20 |
| Bandwidth between vehicle and fog node/MHz | 20 |
| Bandwidth between vehicles MHz | 10 |
| Bandwidth between the fog node and the cloud/MHz | 5 |
| Transmission power of vehicle/W | 1.3 |
| Transmission power of fog server/W | 2 |
| Noise power/W | 3 × 10−13 |
| Calculation power of vehicle/W | 30 |
| Calculation power of fog server/W | 30 |
| Calculation power of cloud server/W | 500 |
| Parameters | Values |
|---|---|
| Population size | 100 |
| Crossover probability | 0.5~0.8 |
| Mutation probability | 0.05 |
| Number of iterations | 100 |
| Initial temperature | 1200 |
| 10 | |
| 5 | |
| γ | 5 |
| φ | 5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, C.; Liu, C.; Zhu, H.; Li, J. Cloud–Fog Collaborative Computing Based Task Offloading Strategy in Internet of Vehicles. Electronics 2024, 13, 2355. https://doi.org/10.3390/electronics13122355
Zhu C, Liu C, Zhu H, Li J. Cloud–Fog Collaborative Computing Based Task Offloading Strategy in Internet of Vehicles. Electronics. 2024; 13(12):2355. https://doi.org/10.3390/electronics13122355
Chicago/Turabian StyleZhu, Chunhua, Chong Liu, Hai Zhu, and Jingtao Li. 2024. "Cloud–Fog Collaborative Computing Based Task Offloading Strategy in Internet of Vehicles" Electronics 13, no. 12: 2355. https://doi.org/10.3390/electronics13122355
APA StyleZhu, C., Liu, C., Zhu, H., & Li, J. (2024). Cloud–Fog Collaborative Computing Based Task Offloading Strategy in Internet of Vehicles. Electronics, 13(12), 2355. https://doi.org/10.3390/electronics13122355