

Effective Denoising Algorithms for Converting Indoor Blueprints Using a 3D Laser Scanner


Abstract
1. Introduction
2. Related Work
2.1. Statistical Outlier Removal (SOR)
2.2. Radius Outlier Removal (ROR)
2.3. RANSAC (Random Sample Consensus)
2.4. Clustering
2.5. Combined Methods
3. Proposed Method
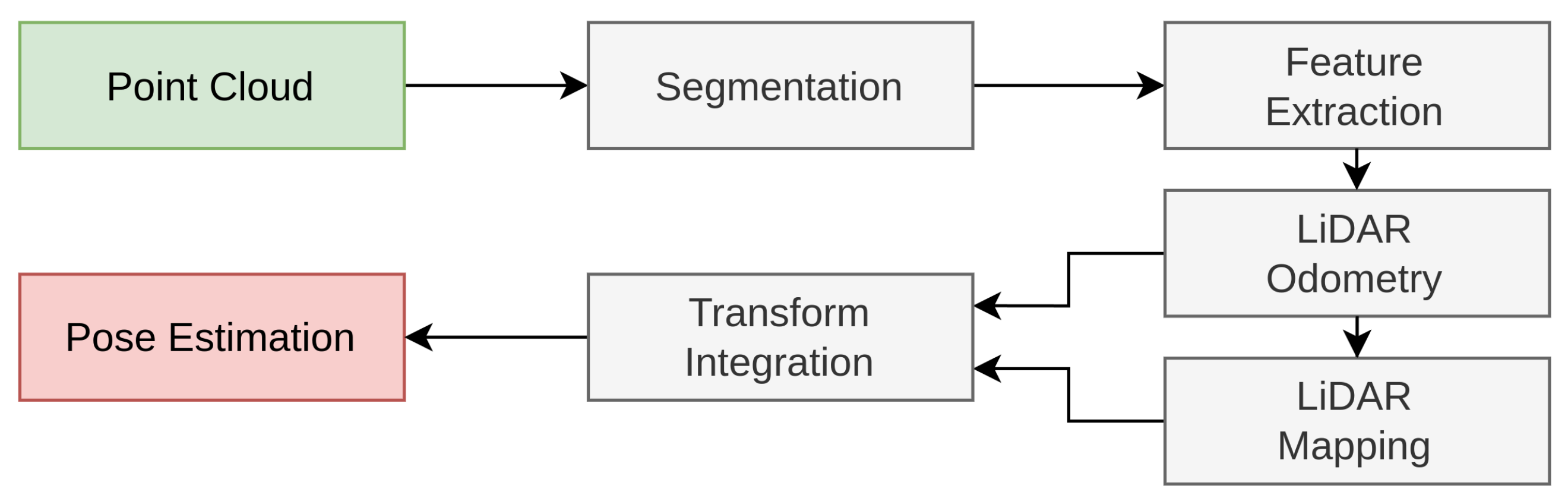
3.1. Map Building
3.2. Clustering-Based Noise Removal
3.3. Height-Based Noise Removal
| Algorithm 1 Height-Based Noise Reduction in Point Clouds | |
| 1: Input: Point cloud P | |
| 2: Output: Denoised point cloud R | |
| 3: | |
| 4: | ▹ Calculate the height of the point cloud |
| 5: | ▹ Define the voxel size |
| 6: user-defined threshold | ▹ Define threshold for filtering noise |
| 7: Initialize voxel map V as an empty dictionary | |
| 8: | |
| 9: for each point do | |
| 10: map p to voxel index based on coordinates and | |
| 11: if not in V then | |
| 12: empty list | |
| 13: end if | |
| 14: Append p to | |
| 15: end for | |
| 16: | |
| 17: Initialize an empty list R | |
| 18: for each in V do | |
| 19: if length of then | |
| 20: Append all points in to R | ▹ Retain points in voxels that meet the threshold |
| 21: end if | |
| 22: end for | |
| 23: | |
| 24: returnR | ▹ Return the filtered, denoised point cloud |
3.4. Statistical Outlier Removal
4. Experiment
4.1. Experiment Environment
4.1.1. Sensor Setting
4.1.2. Map Building
4.2. Noise Removal
4.2.1. Clustering-Based Noise Removal
4.2.2. Height-Based Noise Removal
4.2.3. Statistical-Based Noise Removal
4.2.4. Combination-Based Noise Removal
4.3. Evaluation and Results
4.3.1. Pixel-Based Evaluation
4.3.2. Density-Based Evaluation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cole, D.M.; Newman, P.M. Using laser range data for 3D SLAM in outdoor environments. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, ICRA 2006, Orlando, FL, USA, 15–19 May 2006; pp. 1556–1563. [Google Scholar]
- Huang, L. Review on LiDAR-based SLAM techniques. In Proceedings of the 2021 International Conference on Signal Processing and Machine Learning (CONF-SPML), Online, 11–16 November 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 163–168. [Google Scholar]
- Gao, R.; Li, M.; Yang, S.J.; Cho, K. Reflective noise filtering of large-scale point cloud using transformer. Remote Sens. 2022, 14, 577. [Google Scholar] [CrossRef]
- Gao, R.; Park, J.; Hu, X.; Yang, S.; Cho, K. Reflective noise filtering of large-scale point cloud using multi-position LiDAR sensing data. Remote Sens. 2021, 13, 3058. [Google Scholar] [CrossRef]
- Charron, N.; Phillips, S.; Waslander, S.L. De-noising of lidar point clouds corrupted by snowfall. In Proceedings of the 2018 15th Conference on Computer and Robot Vision (CRV), Toronto, ON, Canada, 9–11 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 254–261. [Google Scholar]
- Fang, H.T.; Huang, D.S. Noise reduction in lidar signal based on discrete wavelet transform. Opt. Commun. 2004, 233, 67–76. [Google Scholar] [CrossRef]
- Balta, H.; Velagic, J.; Bosschaerts, W.; De Cubber, G.; Siciliano, B. Fast Statistical Outlier Removal Based Method for Large 3D Point Clouds of Outdoor Environments. IFAC-PapersOnLine 2018, 51, 348–353. [Google Scholar] [CrossRef]
- Duan, Y.; Yang, C.; Li, H. Low-complexity adaptive radius outlier removal filter based on PCA forlidar point cloud denoising. Appl. Opt. 2021, 60, E1–E7. [Google Scholar] [CrossRef] [PubMed]
- Raguram, R.; Chum, O.; Pollefeys, M.; Matas, J.; Frahm, J.M. USAC: A Universal Framework for Random Sample Consensus. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 2022–2038. [Google Scholar] [CrossRef] [PubMed]
- Schnabel, R.; Wahl, R.; Klein, R. Efficient RANSAC for point-cloud shape detection. Comput. Graph. Forum 2007, 26, 214–226. [Google Scholar] [CrossRef]
- Krishna, K.; Narasimha Murty, M. Genetic K-means algorithm. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 1999, 29, 433–439. [Google Scholar] [CrossRef] [PubMed]
- Schubert, E.; Sander, J.; Ester, M.; Kriegel, H.P.; Xu, X. DBSCAN Revisited, Revisited: Why and How You Should (Still) Use DBSCAN. ACM Trans. Database Syst. 2017, 42, 1–21. [Google Scholar] [CrossRef]
- McInnes, L.; Healy, J.; Astels, S. hdbscan: Hierarchical density based clustering. J. Open Source Softw. 2017, 2, 205. [Google Scholar] [CrossRef]
- Shan, T.; Englot, B. LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4758–4765. [Google Scholar] [CrossRef]
- Zhang, J.; Singh, S. LOAM: Lidar odometry and mapping in real-time. In Proceedings of the Robotics: Science and Systems, Berkeley, CA, USA, 12–16 July 2014; Volume 2, pp. 1–9. [Google Scholar]
- Xu, R.; Wunsch, D. Survey of clustering algorithms. IEEE Trans. Neural Netw. 2005, 16, 645–678. [Google Scholar] [CrossRef] [PubMed]
- Saxena, A.; Prasad, M.; Gupta, A.; Bharill, N.; Patel, O.P.; Tiwari, A.; Er, M.J.; Ding, W.; Lin, C.T. A review of clustering techniques and developments. Neurocomputing 2017, 267, 664–681. [Google Scholar] [CrossRef]
- Jung, J.; Stachniss, C.; Kim, C. Automatic Room Segmentation of 3D Laser Data Using Morphological Processing. ISPRS Int. J. Geo-Inf. 2017, 6, 206. [Google Scholar] [CrossRef]
- Macher, H.; Landes, T.; Grussenmeyer, P. From point clouds to building information models: 3D semi-automatic reconstruction of indoors of existing buildings. Appl. Sci. 2017, 7, 1030. [Google Scholar] [CrossRef]
- Hong, S.; Jung, J.; Kim, S.; Cho, H.; Lee, J.; Heo, J. Semi-automated approach to indoor mapping for 3D as-built building information modeling. Comput. Environ. Urban Syst. 2015, 51, 34–46. [Google Scholar] [CrossRef]
- Cai, Y.; Fan, L. An Efficient Approach to Automatic Construction of 3D Watertight Geometry of Buildings Using Point Clouds. Remote Sens. 2021, 13, 1947. [Google Scholar] [CrossRef]
- Bassier, M.; Vergauwen, M. Topology Reconstruction of BIM Wall Objects from Point Cloud Data. Remote Sens. 2020, 12, 1800. [Google Scholar] [CrossRef]
- Wold, S.; Esbensen, K.; Geladi, P. Principal component analysis. Chemom. Intell. Lab. Syst. 1987, 2, 37–52. [Google Scholar] [CrossRef]
- Cheng, D.; Zhao, D.; Zhang, J.; Wei, C.; Tian, D. PCA-Based Denoising Algorithm for Outdoor Lidar Point Cloud Data. Sensors 2021, 21, 3703. [Google Scholar] [CrossRef]
- Cheng, D.; Zhang, J.; Zhao, D.; Chen, J.; Tian, D. Automatic Extraction of Indoor Structural Information from Point Clouds. Remote Sens. 2021, 13, 4930. [Google Scholar] [CrossRef]
- Han, J.; Rong, M.; Jiang, H.; Liu, H.; Shen, S. Vectorized indoor surface reconstruction from 3D point cloud with multistep 2D optimization. ISPRS J. Photogramm. Remote Sens. 2021, 177, 57–74. [Google Scholar] [CrossRef]
- Shahapure, K.R.; Nicholas, C. Cluster quality analysis using silhouette score. In Proceedings of the 2020 IEEE 7th International Conference on Data Science and Advanced Analytics (DSAA), Sydney, Australia, 6–9 October 2020; pp. 747–748. [Google Scholar]
- Lu, X.; Yao, J.; Tu, J.; Li, K.; Li, L.; Liu, Y. Pairwise linkage for point cloud segmentation. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 3, 201–208. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Gachon Uni. Station | Gachon Hall | AI Building 7F | Vision Tower B3F |
|---|---|---|---|---|
| Point Cloud Image |  |  |  |  |
| Dimensions (mm) | 35,800 × 150,200 | 43,800 × 108,200 | 42,300 × 96,700 | 29,000 × 65,500 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoon, S.; Choi, S.; An, J. Effective Denoising Algorithms for Converting Indoor Blueprints Using a 3D Laser Scanner. Electronics 2024, 13, 2275. https://doi.org/10.3390/electronics13122275
Yoon S, Choi S, An J. Effective Denoising Algorithms for Converting Indoor Blueprints Using a 3D Laser Scanner. Electronics. 2024; 13(12):2275. https://doi.org/10.3390/electronics13122275
Chicago/Turabian StyleYoon, Sehyeon, Sanghyun Choi, and Jhonghyun An. 2024. "Effective Denoising Algorithms for Converting Indoor Blueprints Using a 3D Laser Scanner" Electronics 13, no. 12: 2275. https://doi.org/10.3390/electronics13122275
APA StyleYoon, S., Choi, S., & An, J. (2024). Effective Denoising Algorithms for Converting Indoor Blueprints Using a 3D Laser Scanner. Electronics, 13(12), 2275. https://doi.org/10.3390/electronics13122275