
YOLOv8-CB: Dense Pedestrian Detection Algorithm Based on In-Vehicle Camera


Abstract
1. Introduction
2. Materials and Methods
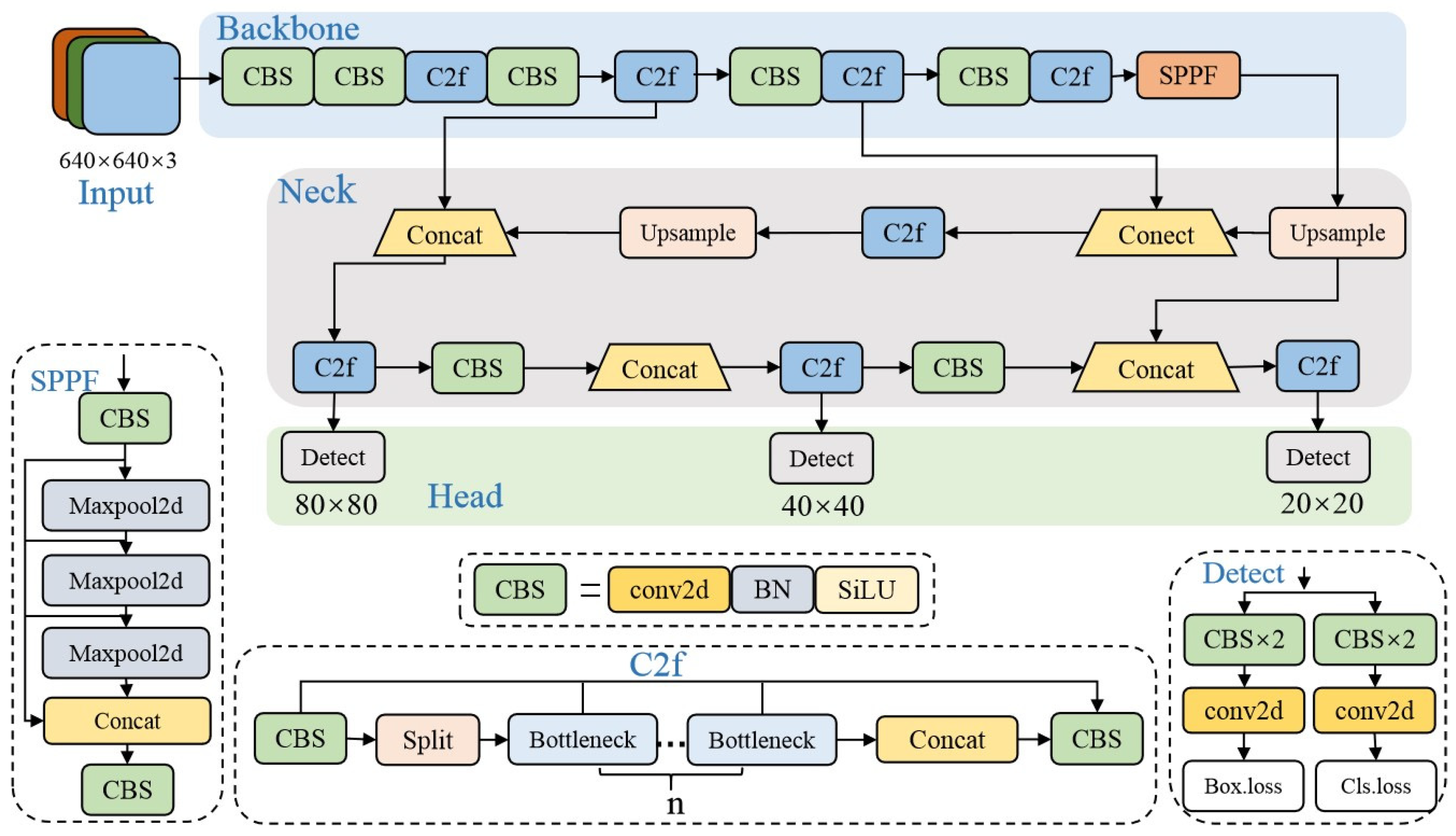
2.1. YOLOv8 Algorithm
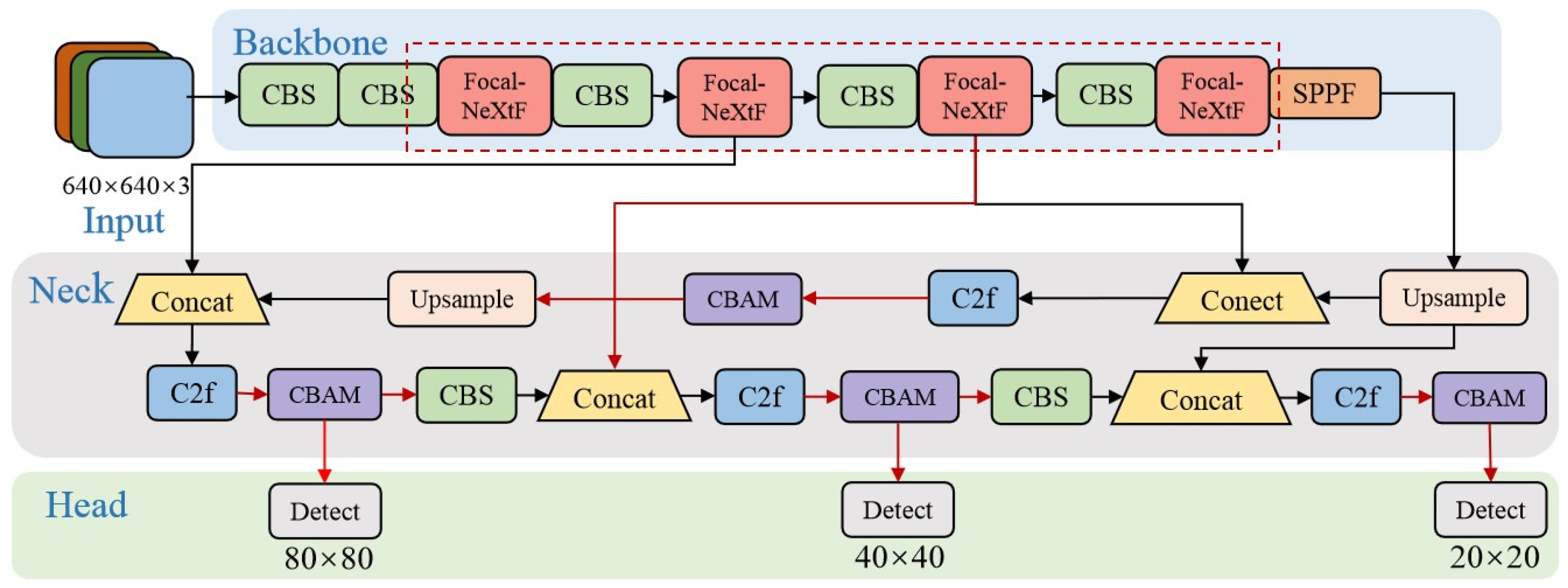
2.2. The Proposed YOLOv8-CB Algorithm
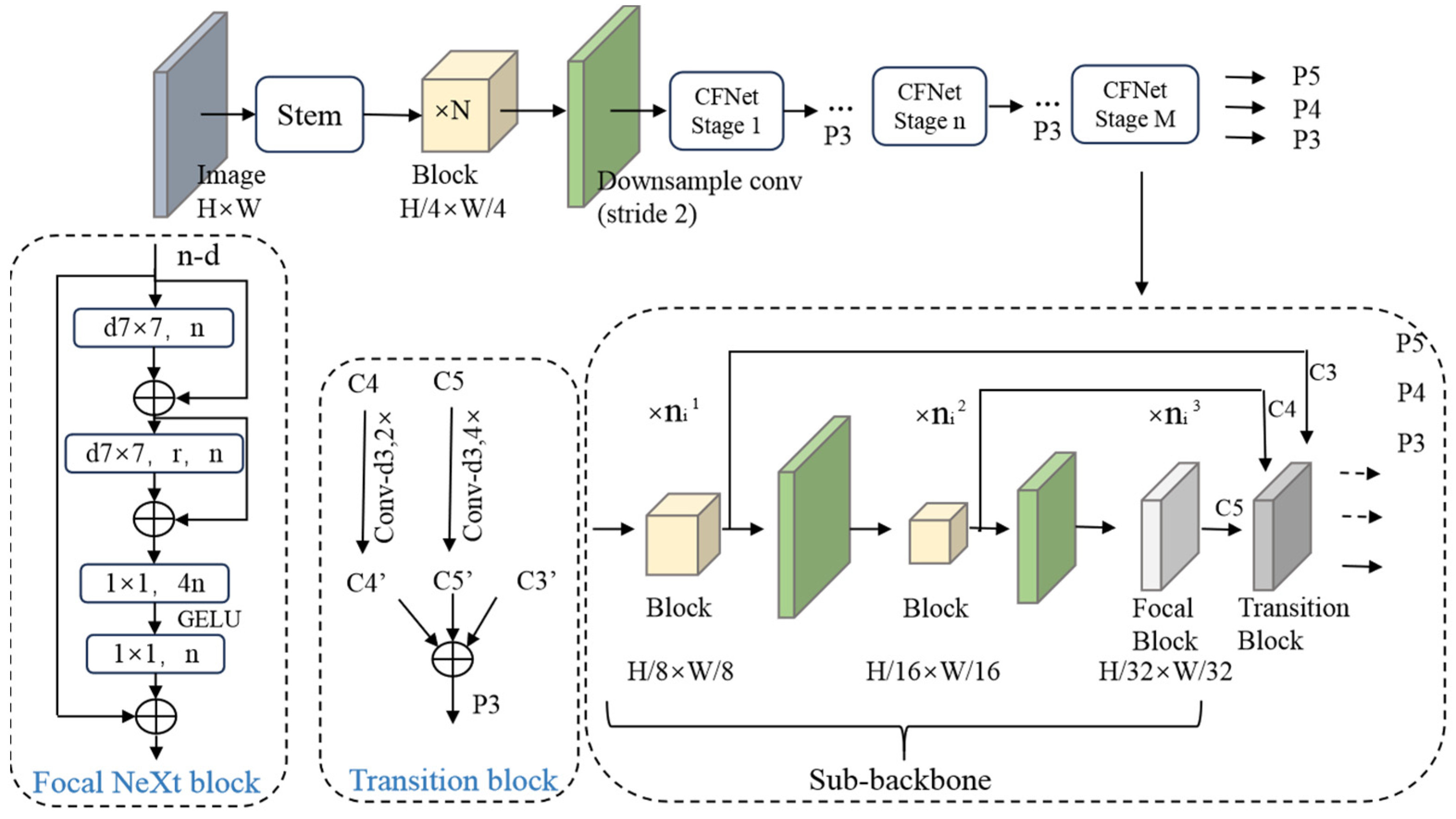
2.2.1. Cascading Fusion Network CFNet
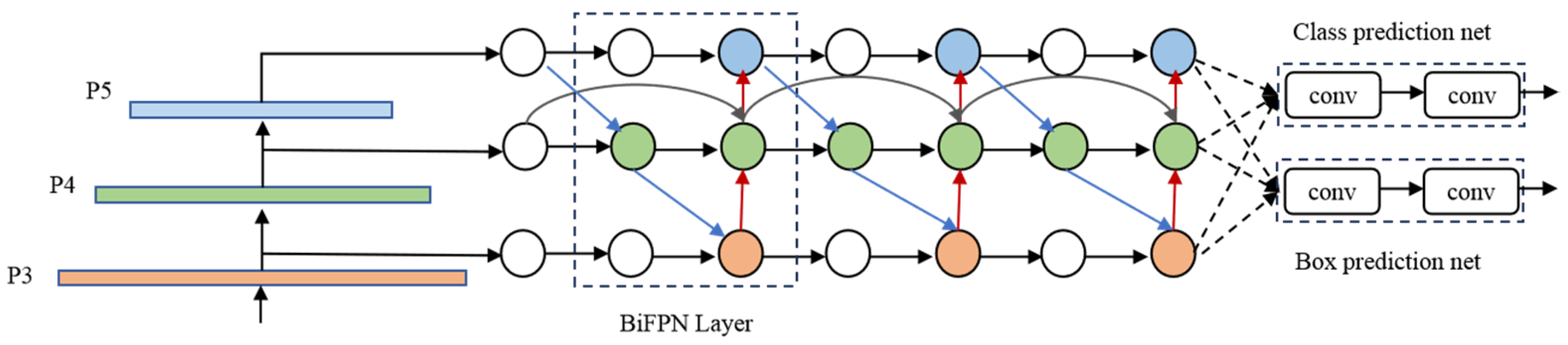
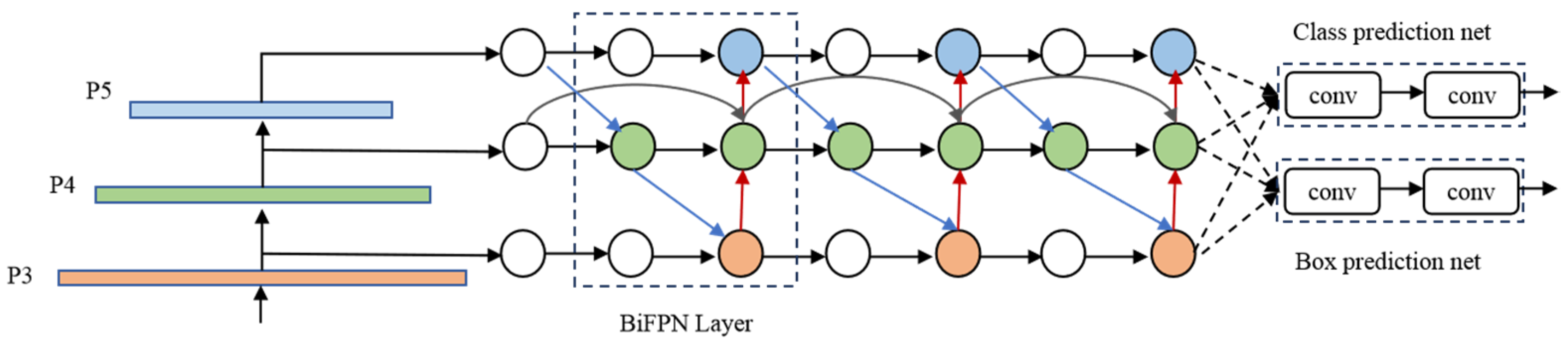
2.2.2. Bidirectional Weighted Feature Fusion Method BIFPN
2.2.3. Channel and Spatial Attention Mechanism CBAM
3. Results
3.1. Experimental Setup and Dataset Preparation
3.2. Experimental Evaluation Index
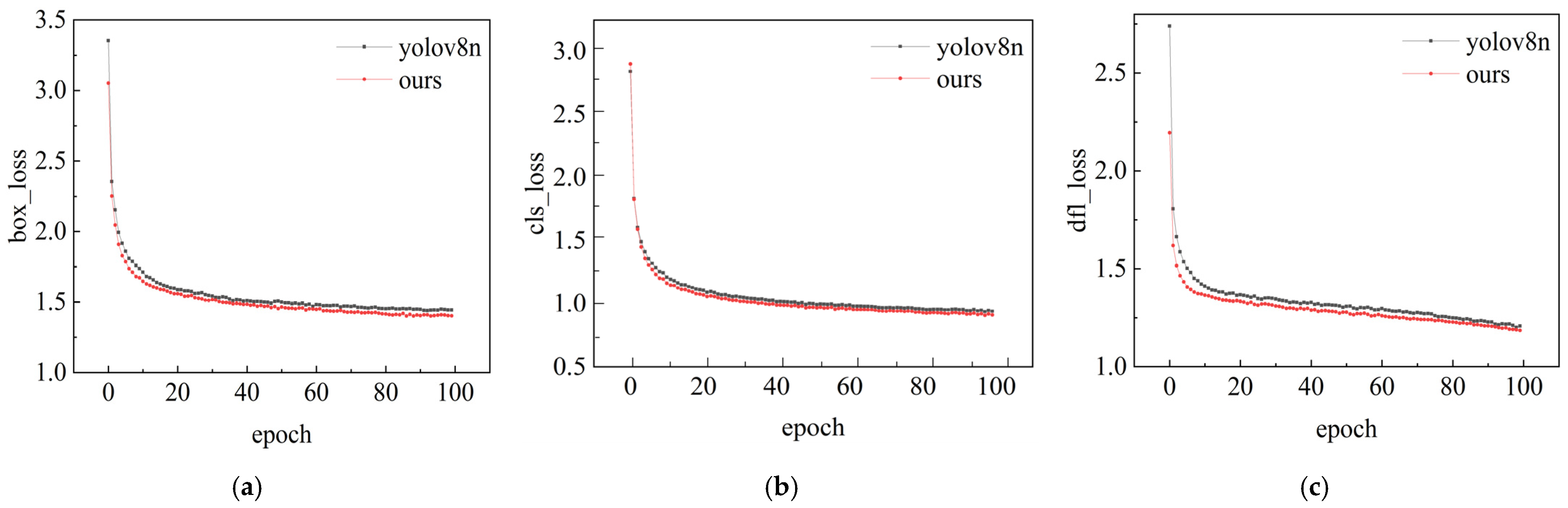
3.3. Data Analysis
3.4. Comparative Analysis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Geng, Y.N.; Liu, S.S.; Liu, T.T.; Yan, W.Y.; Lian, Y.F. A review of pedestrian detection techniques based on computer vision. Comput. Appl. 2021, 41, 43–50. [Google Scholar]
- Brunetti, A.; Buongiorno, D.; Trotta, G.F.; Bevilacqua, V. Computer vision and deep learning techniques for pedestrian detection and tracking: A survey. Neurocomputing 2018, 300, 17–33. [Google Scholar] [CrossRef]
- Dollar, P.; Wojek, C.; Schiele, B.; Perona, P. Pedestrian detection: An evaluation of the state of the art. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 34, 743–761. [Google Scholar] [CrossRef] [PubMed]
- Xiao, Y.Q.; Yang, H.M. A review of target detection algorithms in traffic scenarios. Comput. Eng. Appl. 2021, 57, 30–41. [Google Scholar]
- Yuan, J.; Zhang, G.; Li, F.; Liu, J.; Xu, L.; Wu, S.; Jiang, T.; Guo, D.; Xie, Y. Independent moving object detection based on a vehicle mounted binocular camera. IEEE Sens. J. 2020, 21, 11522–11531. [Google Scholar] [CrossRef]
- Wei, Y.; Xu, C.Q.; Diao, Z.F.; Li, B.Q. Multi-target pedestrian tracking algorithm based on generative adversarial network. J. Northeast. Univ. 2020, 41, 1673–1679+1720. [Google Scholar]
- Ke, W.; Zhang, T.L.; Huang, Z.Y.; Ye, Q.X.; Liu, J.Z.; Huang, D. Multiple anchor learning for visual object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 10203–10212. [Google Scholar]
- Jain, D.K.; Zhao, X.; González-Almagro, G.; Gan, C.; Kotecha, K. Multimodal pedestrian detection using metaheuristics with deep convolutional neural network in crowded scenes. Inf. Fusion 2023, 95, 401–414. [Google Scholar] [CrossRef]
- Ferraz, P.A.P.; de Oliveira, B.A.G.; Ferreira, F.M.F.; Martins, C.A.P.D.S. Three-stage RGBD architecture for vehicle and pedestrian detection using convolutional neural networks and stereo vision. IET Intell. Transp. Syst. 2020, 14, 1319–1327. [Google Scholar] [CrossRef]
- Hou, Y.L.; Song, Y.; Hao, X.; Shen, Y.; Qian, M.; Chen, H. Multispectral pedestrian detection based on deep convolutional neural networks. Infrared Phys. Technol. 2018, 94, 69–77. [Google Scholar] [CrossRef]
- Shen, C.; Zhao, X.; Fan, X.; Lian, X.; Zhang, F.; Kreidieh, A.R.; Liu, Z. Multi-receptive field graph convolutional neural networks for pedestrian detection. IET Intell. Transp. Syst. 2019, 13, 1319–1328. [Google Scholar] [CrossRef]
- Panigrahi, S.; Raju, U.S.N. Pedestrian Detection Based on Hand-crafted Features and Multi-layer Feature Fused-ResNet Model. Int. J. Artif. Intell. Tools 2021, 30, 2150028. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Ren, S.Q.; He, K.M.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single shot multibox detector. In Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016, Proceedings, Part I 14; Springer International Publishing: Berlin/Heidelberg, Germany, 2016; pp. 21–37. [Google Scholar]
- Hussain, M. YOLO-v1 to YOLO-v8, the Rise of YOLO and Its Complementary Nature toward Digital Manufacturing and Industrial Defect Detection. Machines 2023, 11, 677. [Google Scholar] [CrossRef]
- Diwan, T.; Anirudh, G.; Tembhurne, J.V. Object detection using YOLO: Challenges, architectural successors, datasets and applications. Multimed. Tools Appl. 2023, 82, 9243–9275. [Google Scholar] [CrossRef] [PubMed]
- Zha, M.; Qian, W.; Yi, W.; Hua, J. A lightweight YOLOv4-Based forestry pest detection method using coordinate attention and feature fusion. Entropy 2021, 23, 1587. [Google Scholar] [CrossRef] [PubMed]
- Kou, X.; Liu, S.; Cheng, K.; Qian, Y. Development of a YOLO-V3-based model for detecting defects on steel strip surface. Measurement 2021, 182, 109454. [Google Scholar] [CrossRef]
- Zhang, X.Z.; Qiu, Y.; Zhang, C. Improved YOLOv5s algorithm for pedestrian target detection in subway scenes. Adv. Laser Optoelectron. 2023, 60, 144–153. [Google Scholar]
- Ding, Z.; Gu, Z.; Sun, Y.; Xiang, X. Cascaded Cross-Layer Fusion Network for Pedestrian Detection. Mathematics 2022, 10, 139. [Google Scholar] [CrossRef]
- Tan, M.X.; Pang, R.M.; Le, Q.V. Efficientdet: Scalable and efficient object detection. In Proceedings of the IEEE conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 10781–10790. [Google Scholar]
- Lv, Z.X.; Wei, X.; Huang, D.Q. Dense pedestrian detection algorithm for multi-branch anchorless frame networks. Opt. Precis. Eng. 2023, 31, 1532–1547. [Google Scholar]
- Zhou, D.K.; Song, R.; Yang, X. Occlusion-aware pedestrian detection combining dual attention mechanisms. J. Harbin Inst. Technol. 2021, 53, 156–163. [Google Scholar]
- Gu, Z.C.; Zhu, K.; You, S.T. YOLO-SSFS: A Method Combining SPD-Conv/STDL/IM-FPN/SIoU for Outdoor Small Target Vehicle Detection. Electronics 2023, 12, 3744. [Google Scholar] [CrossRef]
- Lou, H.; Duan, X.; Guo, J.; Liu, H.; Gu, J.; Bi, L.; Chen, H. DC-YOLOv8: Small-Size Object Detection Algorithm Based on Camera Sensor. Electronics 2023, 12, 2323. [Google Scholar] [CrossRef]
- Niu, W.H.; Yin, M.M. Road small target detection algorithm based on improved YOLOv5. J. Sens. Technol. 2023, 36, 36–44. [Google Scholar]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path aggregation network for instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 8759–8768. [Google Scholar]
- Lv, X.D.; Wang, S.; Ye, D. CFNet: LiDAR-camera registration using calibration flow network. Sensors 2021, 21, 8112. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Huang, R.; Song, S.; Huang, Z.; Huang, G. Not all images are worth 16x16 words: Dynamic transformers for efficient image recognition. Adv. Neural Inf. Process. Syst. 2021, 34, 11960–11973. [Google Scholar]
- Rao, Y.; Zhao, W.; Zhu, Z.; Lu, J.; Zhou, J. Global filter networks for image classification. Adv. Neural Inf. Process. Syst. 2021, 34, 980–993. [Google Scholar]
- Liu, Z.; Mao, H.; Wu, C.Y.; Feichtenhofer, C.; Darrell, T.; Xie, S. A convnet for the 2020s. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 11976–11986. [Google Scholar]
- Ding, X.; Zhang, X.; Han, J.; Ding, G. Scaling up your kernels to 31 × 31: Revisiting large kernel design in cnns. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 11963–11975. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. Cbam: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; Proveedings, Part VII. pp. 3–19. [Google Scholar]
- Zhang, S.; Xie, Y.; Wan, J.; Xia, H.; Li, S.Z.; Guo, G. Widerperson: A diverse dataset for dense pedestrian detection in the wild. IEEE Trans. Multimed. 2019, 22, 380–393. [Google Scholar] [CrossRef]
- Cao, Y.; He, Z.; Wang, L.; Wang, W.; Yuan, Y.; Zhang, D.; Zhang, J.; Zhu, P.; Van Gool, L.; Han, J.; et al. VisDrone-DET2021: The Vision Meets Drone Object Detection Challenge Results. In Proceedings of the 2021 IEEE International Conference on Computer Vision Workshops (ICCVW), Montreal, BC, Canada, 11–17 October 2021; pp. 2847–2854. [Google Scholar]
- Shao, S.; Zhao, Z.; Li, B.; Xiao, T.; Yu, G.; Zhang, X.; Sun, J. CrowdHuman: A Benchmark for Detecting Human in a Crowd 2018. arXiv 2018. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Pedestrian | Riders | Partially Visible-Persons | P | R | mAP0.5 |
|---|---|---|---|---|---|---|
| YOLOv8n | 87.6 | 37.1 | 32.2 | 59.2 | 49.4 | 52.3 |
| YOLOv8-CB | 88.0 | 43.3 | 32.9 | 59.8 | 51.4 | 54.7 |
| Method | FN | CBAM | BIFPN | mAP/% | GFLOPs | Params(M) | FPS (Frame/s) |
|---|---|---|---|---|---|---|---|
| Yolov8n | 52.3 | 8.2 | 3.2 | 113.63 | |||
| Yolov8n + FN | √ 1 | 53.5 | 7.4 | 2.6 | 105.26 | ||
| Yolov8n + FN + CBAM | √ | √ | 54.2 | 7.5 | 2.7 | 91.74 | |
| Yolov8n + FN + BIFPN | √ | √ | 54.3 | 7.4 | 2.6 | 112.36 | |
| Yolov8-CB | √ | √ | √ | 54.7 | 7.5 | 2.7 | 92.59 |
| Datasets | Result | SSD(VGG) | YOLOv3-tiny | YOLOv4-tiny | YOLOv5s | YOLOv7-tiny | YOLOv8n | YOLOv8-CB |
|---|---|---|---|---|---|---|---|---|
| Visdrone | mAP0.5 | 23.2 | 21.0 | 18.2 | 27.4 | 25.6 | 28.4 | 30.6 |
| mAP0.5:0.95 | 11.6 | 11.3 | 10.3 | 15.2 | 12.3 | 15.7 | 17.7 | |
| Crowdhuman | mAP0.5 | 70.2 | 68.6 | 51.5 | 77.8 | 75.2 | 78.2 | 80.1 |
| mAP0.5:0.95 | 43.5 | 40.2 | 32.4 | 46.2 | 43.9 | 46.7 | 48.5 | |
| WiderPerson | mAP0.5 | 49.5 | 49.0 | 40.8 | 51.2 | 50.2 | 52.3 | 54.7 |
| mAP0.5:0.95 | 28.3 | 27.9 | 21.2 | 29.8 | 28.9 | 31.4 | 32.6 |
| Method | mAP/% | FLOPs (G) | Params (M) | FPS (Frame/s) |
|---|---|---|---|---|
| SSD(VGG) | 49.5 | 62.7 | 26.3 | 35 |
| YOLOv3-tiny | 49.0 | 19.1 | 12.1 | 182.01 |
| YOLOv4-tiny | 40.8 | 16.5 | 6.1 | 112.36 |
| YOLOv5s | 51.2 | 15.8 | 7.1 | 70.42 |
| YOLOv7-tiny | 50.2 | 13.2 | 6.07 | 109.24 |
| YOLOv8n | 52.3 | 8.2 | 3.2 | 113.63 |
| YOLOv8-CB | 54.7 | 7.5 | 2.7 | 92.59 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Ye, H.; Wang, S.; Xu, Z. YOLOv8-CB: Dense Pedestrian Detection Algorithm Based on In-Vehicle Camera. Electronics 2024, 13, 236. https://doi.org/10.3390/electronics13010236
Liu Q, Ye H, Wang S, Xu Z. YOLOv8-CB: Dense Pedestrian Detection Algorithm Based on In-Vehicle Camera. Electronics. 2024; 13(1):236. https://doi.org/10.3390/electronics13010236
Chicago/Turabian StyleLiu, Qiuli, Haixiong Ye, Shiming Wang, and Zhe Xu. 2024. "YOLOv8-CB: Dense Pedestrian Detection Algorithm Based on In-Vehicle Camera" Electronics 13, no. 1: 236. https://doi.org/10.3390/electronics13010236
APA StyleLiu, Q., Ye, H., Wang, S., & Xu, Z. (2024). YOLOv8-CB: Dense Pedestrian Detection Algorithm Based on In-Vehicle Camera. Electronics, 13(1), 236. https://doi.org/10.3390/electronics13010236