





Study of Channel-Type Dynamic Weighing System for Goat Herds

 ,
,
Abstract
1. Introduction
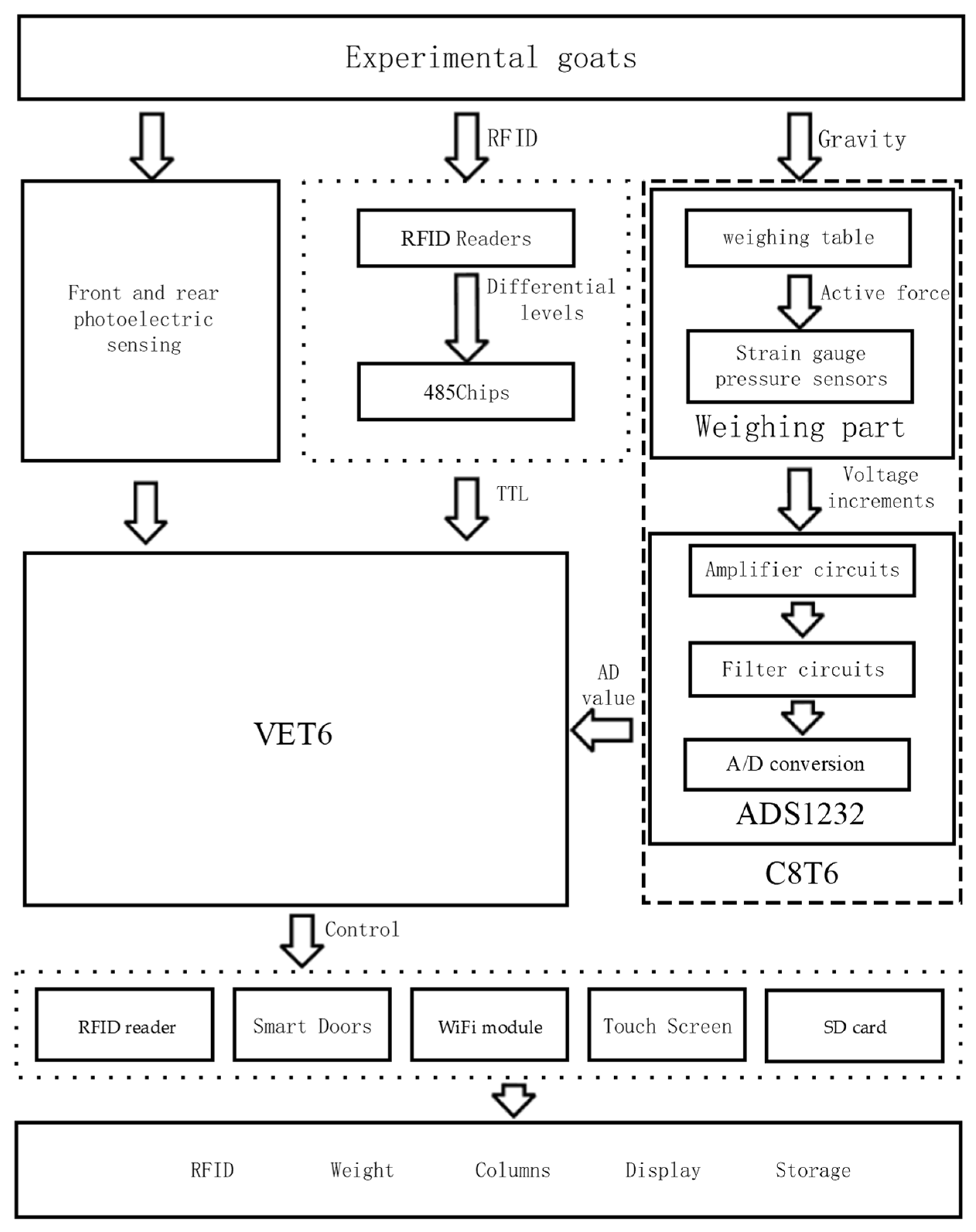
2. Principles of Operation and System Structure of the Channel-Type Flock Dynamic Weighing System
2.1. Working Principles of the Channel-Type Sheep Dynamic Weighing System
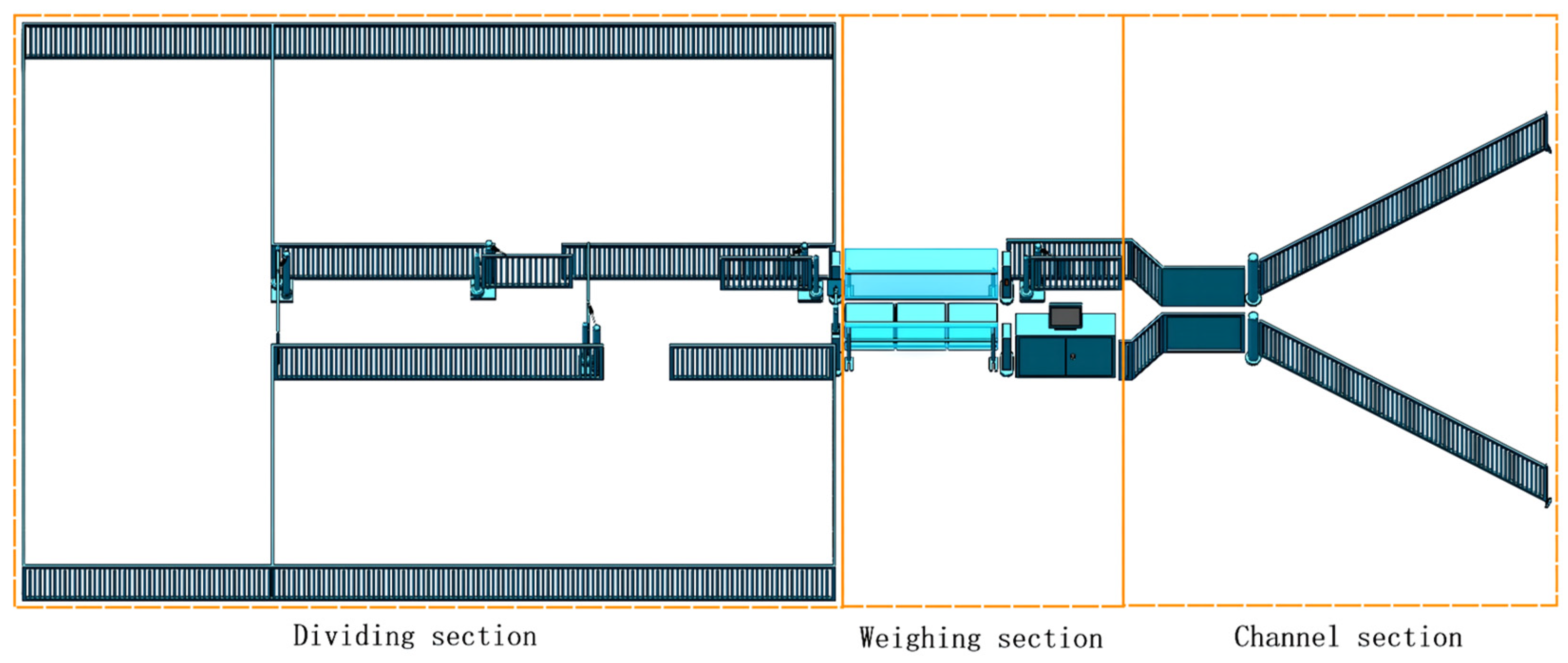
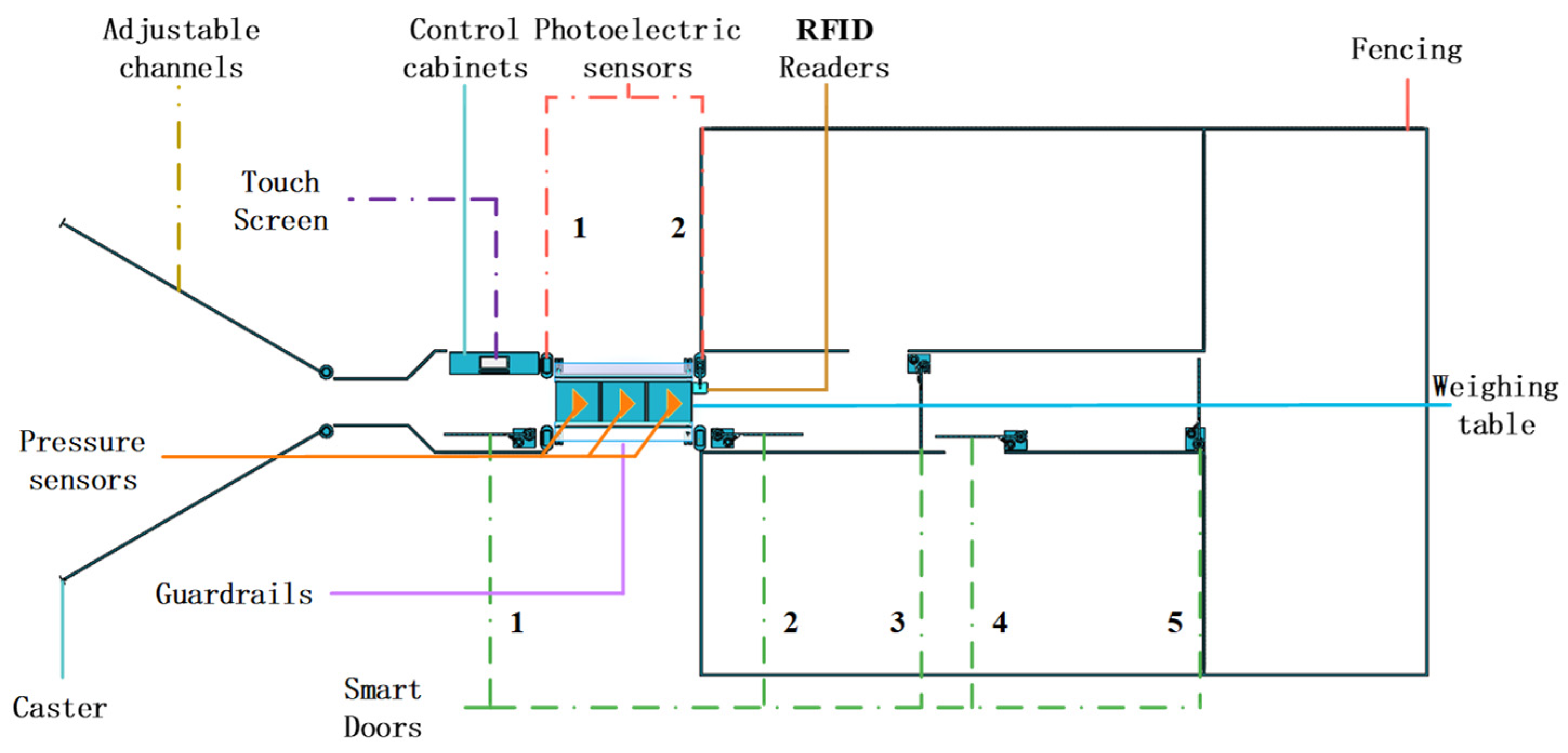
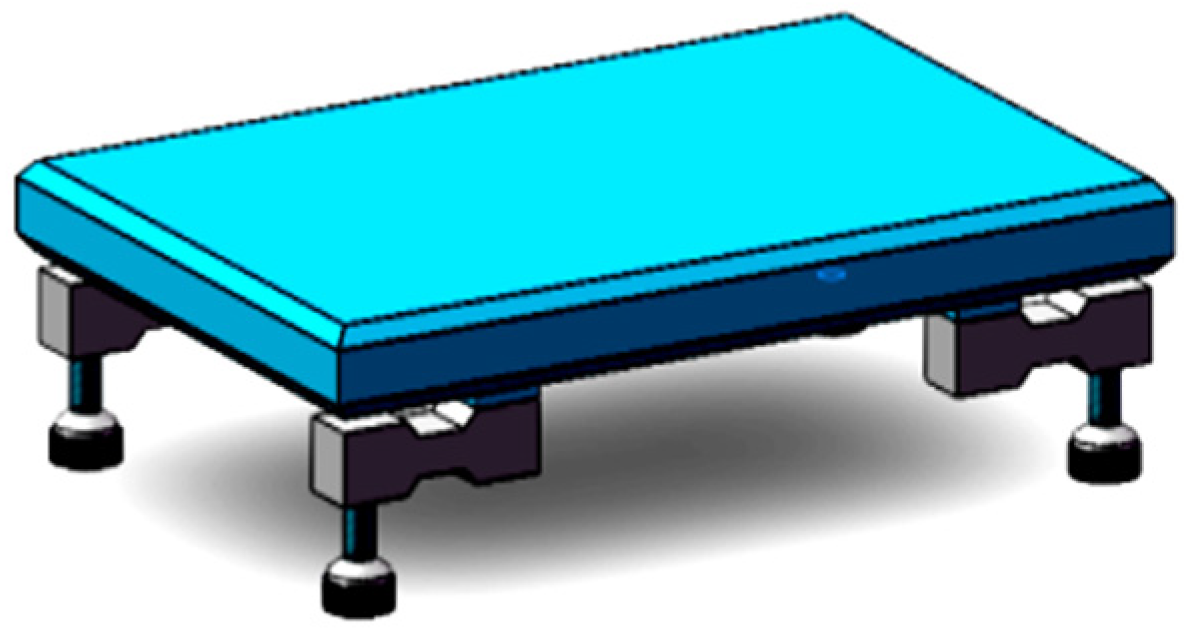
2.2. Channel-Type Flock Dynamic Weighing System Construction
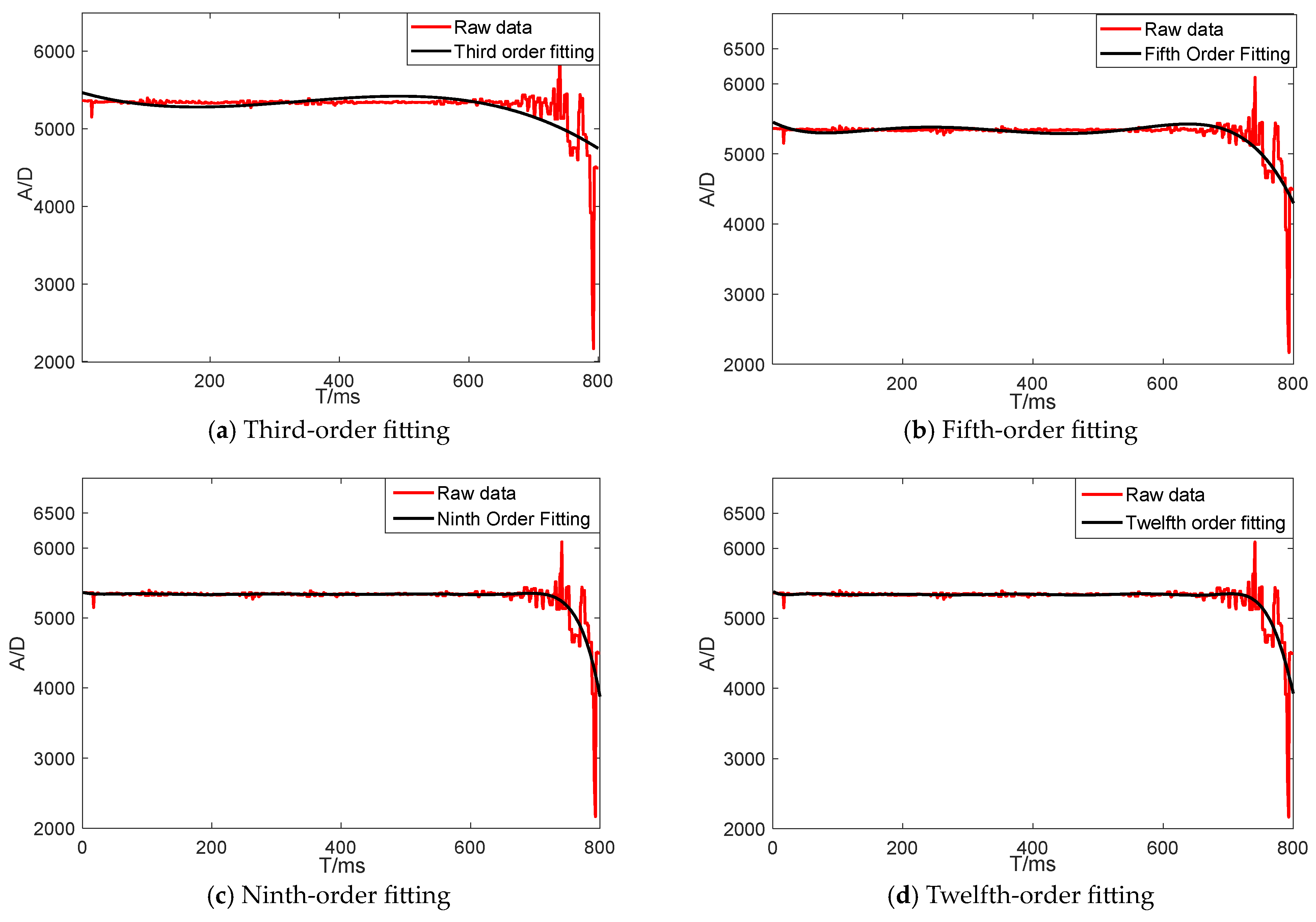
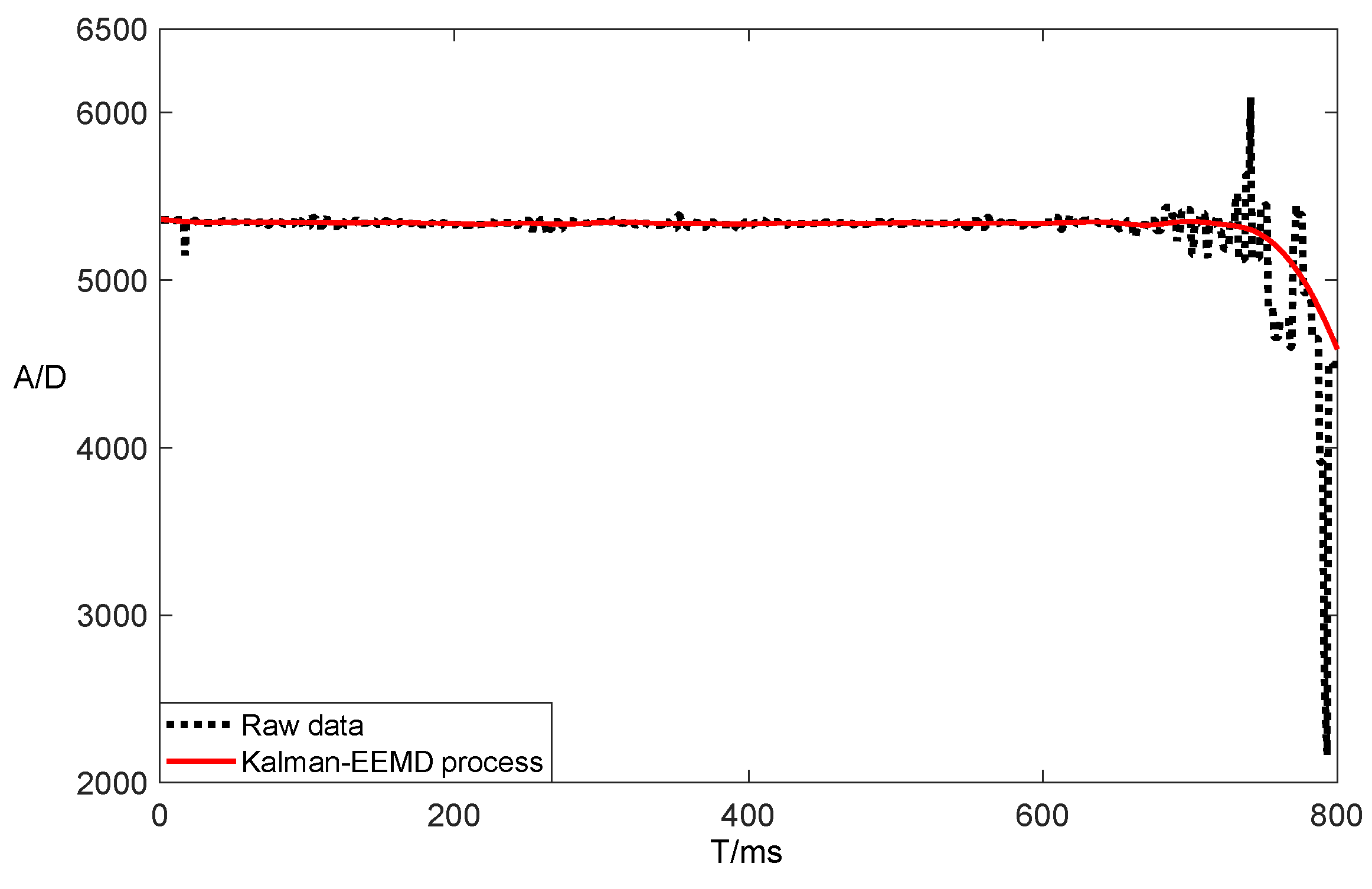
3. Algorithm Design for the Weighing Section
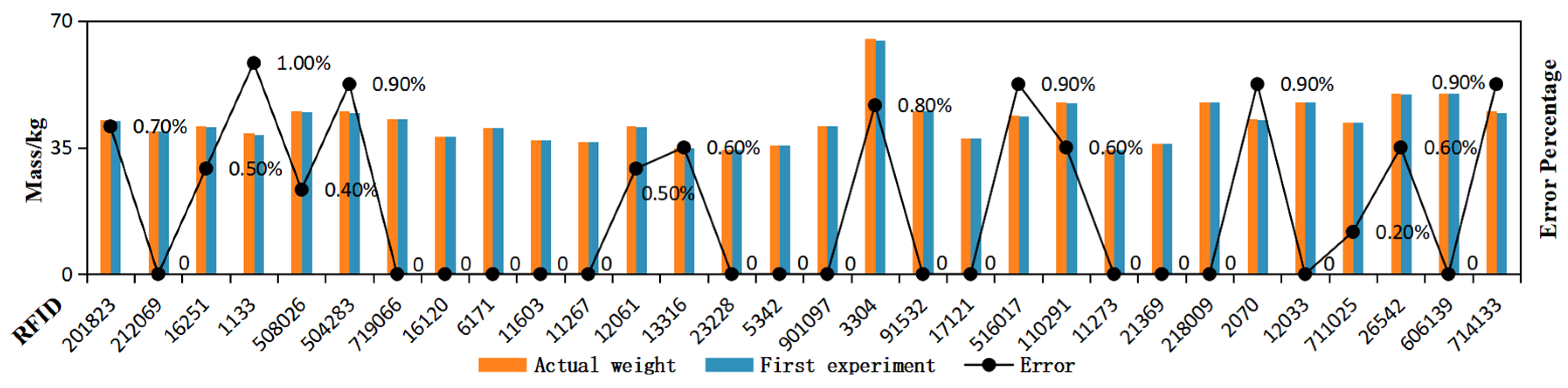
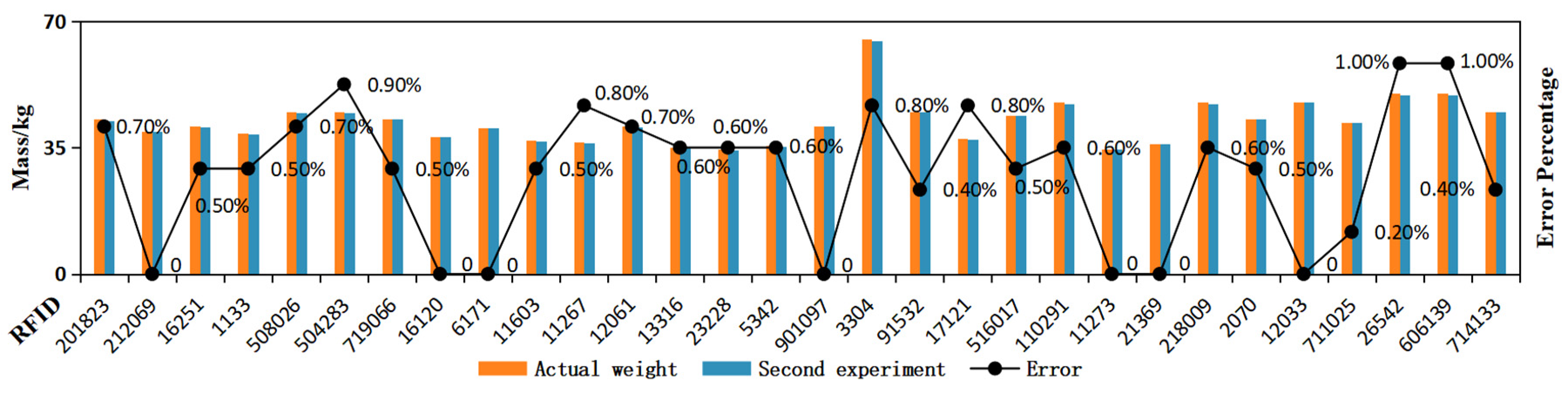
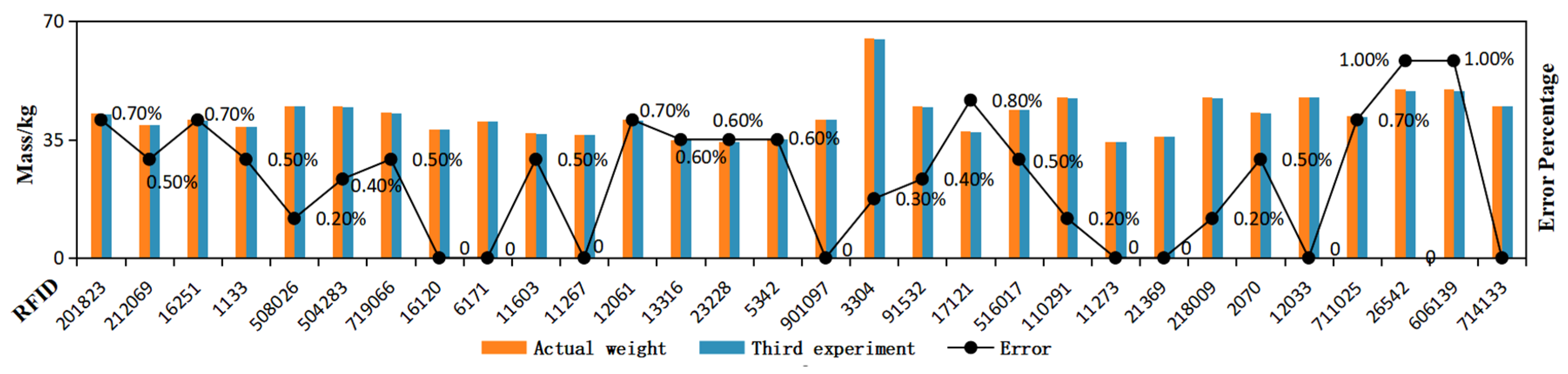
4. Field Experiments and Data Analysis of the System
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cappai, M.; Rubiu, N.; Nieddu, G.; Bitti, M.; Pinna, W. Analysis of fieldwork activities during milk production recording in dairy ewes by means of individual ear tag (ET) alone or plus RFID based electronic identification (EID). Comput. Electron. Agric. 2018, 144, 324–328. [Google Scholar] [CrossRef]
- Niedźwiecki, M.; Wasilewski, A. Application of adaptive filtering to dynamic weighing of vehicles. Control Eng. Pract. 1996, 4, 635–644. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- González-García, E.; Alhamada, M.; Nascimento, H.; Portes, D.; Bonnafe, G.; Allain, C.; Llach, I.; Hassoun, P.; Gautier, J.; Parisot, S. Measuring liveweight changes in lactating dairy ewes with an automated walk-over-weighing system. J. Dairy Sci. 2021, 104, 5675–5688. [Google Scholar] [CrossRef]
- Mendoza-Lugo, M.A.; Morales-Nápoles, O.; Delgado-Hernández, D.J. A Non-parametric Bayesian Network for multivariate probabilistic modelling of Weigh-in-Motion System Data. Transp. Res. Interdiscip. Perspect. 2022, 13, 100552. [Google Scholar] [CrossRef]
- Polat, E.S.; Çağlayan, T.; Garip, M.; Coşkun, B. Improving mobile sheep walk-over weighing system designed for quick, easy and accurate evaluation of herds’ status in field. Curr. Opin. Biotechnol. 2013, 24, S28. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, W.; Winter, P.; Walker, L. Walk-through weighing of pigs using machine vision and an artificial neural network. Biosyst. Eng. 2008, 100, 117–125. [Google Scholar] [CrossRef]
- Song, X.; Bokkers, E.; van der Tol, P.; Koerkamp, P.G.; van Mourik, S. Automated body weight prediction of dairy cows using 3-dimensional vision. J. Dairy Sci. 2018, 101, 4448–4459. [Google Scholar] [CrossRef]
- Jiang, L.; Liu, N. Correcting noisy dynamic mode decomposition with Kalman filters. J. Comput. Phys. 2022, 461, 111175. [Google Scholar] [CrossRef]
- Peng, Z.; Tse, P.W.; Chu, F. An improved Hilbert–Huang transform and its application in vibration signal analysis. J. Sound Vib. 2005, 286, 187–205. [Google Scholar] [CrossRef]
- Liu, B.; Riemenschneider, S.; Xu, Y. Gearbox fault diagnosis using empirical mode decomposition and Hilbert spectrum. Mech. Syst. Signal Process. 2006, 20, 718–734. [Google Scholar] [CrossRef]
- Bin, G.; Gao, J.; Li, X.; Dhillon, B. Early fault diagnosis of rotating machinery based on wavelet packets—Empirical mode decomposition feature extraction and neural network. Mech. Syst. Signal Process. 2012, 27, 696–711. [Google Scholar] [CrossRef]
- Junsheng, C.; Dejie, Y.; Yu, Y. A fault diagnosis approach for roller bearings based on EMD method and AR model. Mech. Syst. Signal Process. 2006, 20, 350–362. [Google Scholar] [CrossRef]
- Bian, K.; Wu, Z. Data-based model with EMD and a new model selection criterion for dam health monitoring. Eng. Struct. 2022, 260, 114171. [Google Scholar] [CrossRef]
- Zou, S.; Qiu, T.; Huang, P.; Bai, X.; Liu, C. Constructing Multi-scale Entropy Based on the Empirical Mode Decomposition(EMD) and its Application in Recognizing Driving Fatigue. J. Neurosci. Methods 2020, 341, 108691. [Google Scholar] [CrossRef]
- Lin, D.-C.; Guo, Z.-L.; An, F.-P.; Zeng, F.-L. Elimination of end effects in empirical mode decomposition by mirror image coupled with support vector regression. Mech. Syst. Signal Process. 2012, 31, 13–28. [Google Scholar] [CrossRef]
- Colominas, M.A.; Schlotthauer, G.; Torres, M.E. Improved complete ensemble EMD: A suitable tool for biomedical signal processing. Biomed. Signal Process. Control 2014, 14, 19–29. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, M.; Yu, Q.; Zhang, H. Comparing the applications of EMD and EEMD on time—Frequency analysis of seismic signal. J. Appl. Geophys. 2012, 83, 29–34. [Google Scholar] [CrossRef]
- Shrivastava, Y.; Singh, B. A comparative study of EMD and EEMD approaches for identifying chatter frequency in CNC turning. Eur. J. Mech. A Solids 2019, 73, 381–393. [Google Scholar] [CrossRef]
- Zheng, J.; Cheng, J.; Yang, Y. Partly ensemble empirical mode decomposition: An improved noise-assisted method for eliminating mode mixing. Signal Process. 2014, 96, 362–374. [Google Scholar] [CrossRef]
- Zhang, J.; Qin, X.; Yuan, J.; Wang, X.; Zeng, Y. The extraction method of laser ultrasonic defect signal based on EEMD. Opt. Commun. 2020, 484, 126570. [Google Scholar] [CrossRef]
- Gong, X.; Ding, L.; Du, W.; Wang, H. Gear Fault Diagnosis Using Dual Channel Data Fusion and EEMD Method. Procedia Eng. 2017, 174, 918–926. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RFID Number | Actual Weight/Kg | First/Kg | Region | Error Rate/% | Second/Kg | Region | Error Rate/% | Third/Kg | Region | Error Rate/% |
|---|---|---|---|---|---|---|---|---|---|---|
| 201823 | 42.8 | 42.5 | B | 0.7% | 42.5 | B | 0.7% | 42.5 | B | 0.7% |
| 212069 | 39.5 | 39.5 | B | 0.0% | 39.5 | B | 0.0% | 39.3 | B | 0.5% |
| 016251 | 41.0 | 40.8 | B | 0.5% | 40.8 | B | 0.5% | 40.7 | B | 0.7% |
| 001133 | 39.0 | 38.6 | B | 1.0% | 38.8 | B | 0.5% | 38.8 | B | 0.5% |
| 508026 | 45.0 | 44.8 | B | 0.4% | 44.7 | B | 0.7% | 44.9 | B | 0.2% |
| 504283 | 45.0 | 44.6 | B | 0.9% | 44.6 | B | 0.9% | 44.8 | B | 0.4% |
| 719066 | 43.0 | 43.0 | B | 0.0% | 42.8 | B | 0.5% | 42.8 | B | 0.5% |
| 016120 | 38.0 | 38.0 | B | 0.0% | 38.0 | B | 0.0% | 38.0 | B | 0.0% |
| 06171 | 40.5 | 40.5 | B | 0.0% | 40.5 | B | 0.0% | 40.5 | B | 0.0% |
| 11603 | 37.0 | 37.0 | B | 0.0% | 36.8 | B | 0.5% | 36.8 | B | 0.5% |
| 011267 | 36.5 | 36.5 | B | 0.0% | 36.2 | B | 0.8% | 36.5 | B | 0.0% |
| 12061 | 41.0 | 40.8 | B | 0.5% | 40.7 | B | 0.7% | 40.7 | B | 0.7% |
| 013316 | 35.0 | 34.8 | C | 0.6% | 34.8 | C | 0.6% | 34.8 | C | 0.6% |
| 023228 | 34.5 | 34.5 | C | 0.0% | 34.3 | C | 0.6% | 34.3 | C | 0.6% |
| 5342 | 35.5 | 35.5 | B | 0.0% | 35.3 | B | 0.6% | 35.3 | B | 0.6% |
| 901097 | 41.0 | 41.0 | B | 0.0% | 41.0 | B | 0.0% | 41.0 | B | 0.0% |
| 003304 | 65.0 | 64.5 | A | 0.8% | 64.5 | A | 0.8% | 64.8 | A | 0.3% |
| 091532 | 45.0 | 45.0 | A | 0.0% | 44.8 | B | 0.4% | 44.8 | B | 0.4% |
| 017121 | 37.5 | 37.5 | B | 0.0% | 37.2 | B | 0.8% | 37.2 | B | 0.8% |
| 516017 | 44.0 | 43.6 | B | 0.9% | 43.8 | B | 0.5% | 43.8 | B | 0.5% |
| 110291 | 47.5 | 47.2 | A | 0.6% | 47.2 | A | 0.6% | 47.4 | A | 0.2% |
| 011273 | 34.5 | 34.5 | C | 0.0% | 34.5 | C | 0.0% | 34.5 | C | 0.0% |
| 21369 | 36.0 | 36.0 | B | 0.0% | 36.0 | B | 0.0% | 36.0 | B | 0.0% |
| 218009 | 47.5 | 47.5 | A | 0.0% | 47.2 | A | 0.6% | 47.4 | A | 0.2% |
| 02070 | 43.0 | 42.6 | B | 0.9% | 42.8 | B | 0.5% | 42.8 | B | 0.5% |
| 12033 | 47.5 | 47.5 | A | 0.0% | 47.5 | A | 0.0% | 47.5 | A | 0.0% |
| 711025 | 42.0 | 41.9 | B | 0.2% | 41.9 | B | 0.2% | 41.7 | B | 0.7% |
| 026542 | 50.0 | 49.7 | A | 0.6% | 49.5 | A | 1.0% | 49.5 | A | 1.0% |
| 606139 | 50.0 | 50.0 | A | 0.0% | 49.5 | A | 1.0% | 49.5 | A | 1.0% |
| 714133 | 45.0 | 44.6 | B | 0.9% | 44.8 | B | 0.4% | 45.0 | A | 0.0% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Z.; Wang, K.; Chen, J.; Xin, J.; Du, H.; Han, D.; Guo, Y. Study of Channel-Type Dynamic Weighing System for Goat Herds. Electronics 2023, 12, 1715. https://doi.org/10.3390/electronics12071715
He Z, Wang K, Chen J, Xin J, Du H, Han D, Guo Y. Study of Channel-Type Dynamic Weighing System for Goat Herds. Electronics. 2023; 12(7):1715. https://doi.org/10.3390/electronics12071715
Chicago/Turabian StyleHe, Zhiwen, Kun Wang, Jingjing Chen, Jile Xin, Hongwei Du, Ding Han, and Ying Guo. 2023. "Study of Channel-Type Dynamic Weighing System for Goat Herds" Electronics 12, no. 7: 1715. https://doi.org/10.3390/electronics12071715
APA StyleHe, Z., Wang, K., Chen, J., Xin, J., Du, H., Han, D., & Guo, Y. (2023). Study of Channel-Type Dynamic Weighing System for Goat Herds. Electronics, 12(7), 1715. https://doi.org/10.3390/electronics12071715