1. Introduction
Unmanned aerial vehicles (UAVs, also known as drones) have become more and more popular due to the swift uptake of technological advancements such as inexpensive Wi-Fi radio connections, navigation systems, sensing, lightbridge technology, multi-SIM LTE/4G, 5G, and integrated devices. UAVs are currently widely used in military operations, civilian applications, and academic research. UAVs can easily connect to a network and may operate with varying levels of automation, whether remotely controlled by a ground station administrator or entirely autonomously by an embedded system [
1,
2].
UAVs can significantly improve wireless communication networks. UAV networks can be categorized into two types: single-UAV networks and multi-UAV networks. A single-UAV network is typically a large UAV connected directly to a ground control station and a satellite network. This type of network is frequently employed to carry out specific missions. A single UAV network is installed using complicated hardware communication technologies to maintain connectivity with the ground control station. It is noteworthy that if the UAV fails, the operation will be terminated. On the other hand, in a multi-UAV network, multiple UAVs are connected to one another, as well as to a base station, sensors, and a satellite. A multi-UAV network surpasses a single UAV system in terms of survivability, dependability, mission completion time, and redundancy. This implies that even if one of the UAVs fails during an operation, the operation may be completed by other UAVs [
1].
A flying ad-hoc network (FANET) [
3] is a type of multi-UAV network using an ad hoc communication method. In particular, a FANET (or UAV ad hoc network) is an autonomous, self-organizing network in which UAVs not only link to neighboring UAVs to transmit data packets from the source to the destination but also use their neighbor’s UAVs to relay data. UAV ad hoc networks are made up of all flying UAVs, but only some of them can communicate with satellites or base stations. Consequently, all UAVs may communicate with each other in addition to the base station. A UAV ad hoc network provides several benefits, including flexibility, greater accuracy, more economics, continuity, and increased speed [
4].
Data transfer between UAV nodes requires the use of a routing protocol. The requirements of FANETs [
5] are not fully addressed by the conventional ad hoc network routing techniques for mobile ad hoc networks (MANETs) and vehicular ad hoc networks (VANETs). A UAV ad hoc network has additional specific features such as rapid mobility, three-dimensional space flight, quick topology changes, frequent breaking connections, network segmentation, low node density, and limited energy that make effective routing protocols complex [
6,
7]. Furthermore, the quality-of-service (QoS) requirements for diverse UAV applications vary greatly. For example, certain applications, such as data collection and mapping, may tolerate delays, while other applications, such as search and rescue missions, demand a real-time data stream with as few delays as possible. As a result, a lot of research has been conducted to implement routing protocols that take into consideration the application needs as well as the unique aspects of UAV ad hoc networks. To highlight the suggested modifications in well-known ad hoc routing protocols, several earlier studies compared ad hoc routing protocols based on their specific UAV use cases [
8].
In this paper, we evaluate the efficacy of four routing protocols in a SAR scenario in which a rectangular search area is well-defined and the mission is completed more quickly by using several UAVs. Additionally, we take into account a randomized search scheme that is motivated by a time-dependent mobility model. Nevertheless, the research does not take into account planned search schemes or circle search schemes.
The main contributions of this paper are the following:
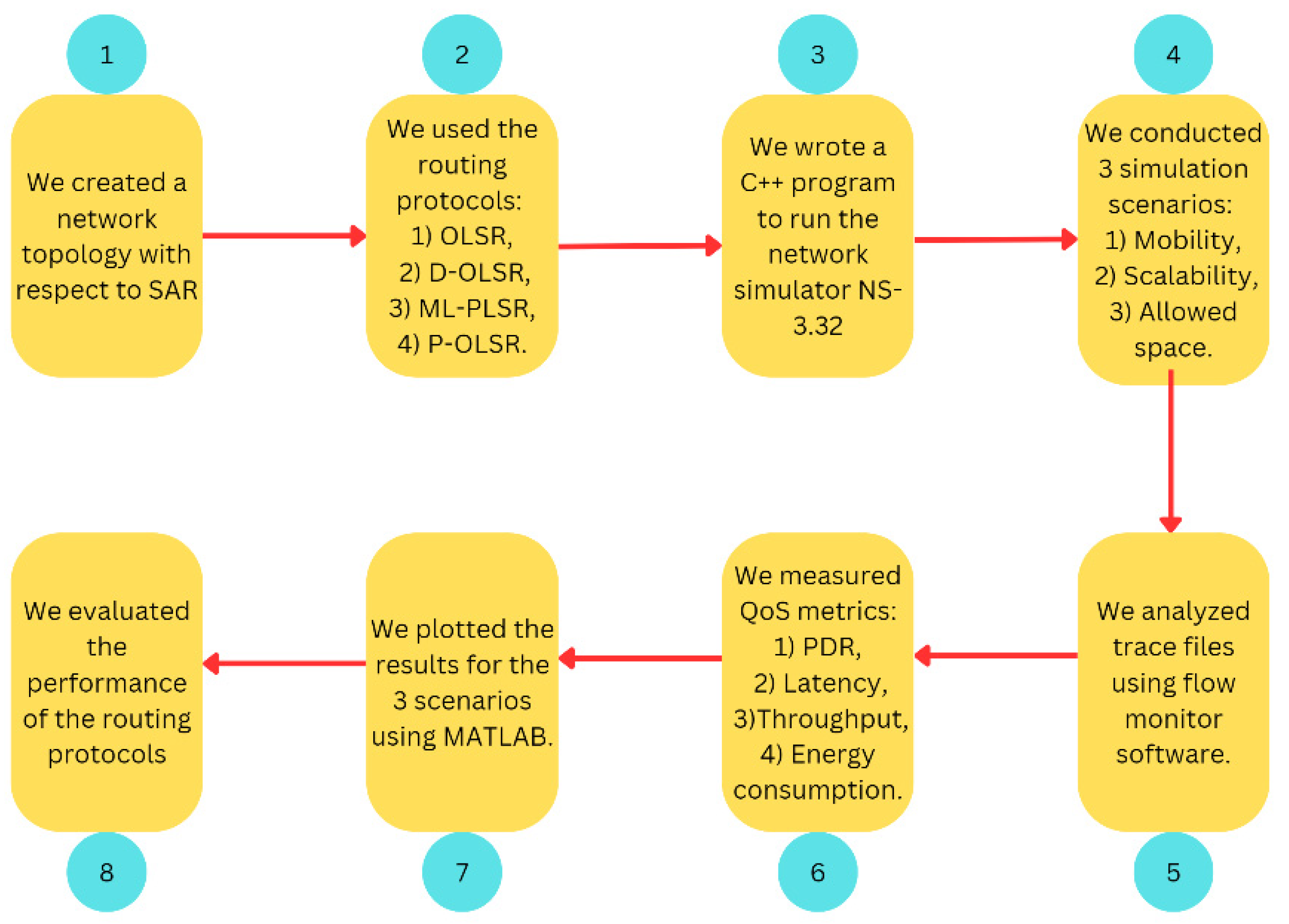
This research study evaluates the efficiency of four well-known routing algorithms in a UAV ad hoc network. These algorithms are the standard Optimized Link State Routing Protocol (OLSR) [
9], the Directional-OLSR (D-OLSR), the Mobility and Load Aware OLSR (ML-OLSR), and the Predictive-OLSR (P-OLSR). We chose to study and simulate these routing protocols because OLSR is the most relevant routing solution specifically in a search and rescue (SAR) environment;
It tests the performance of the above OLSR-based routing algorithms in a SAR environment. NS-3 was used to simulate the above protocols and replicate three SAR scenarios;
It considers three simulation scenarios, including (1) increasing mobility, (2) increasing scalability, and (3) increasing the allowed space of UAVs. Moreover, multiple performance QoS parameters, including packet delivery ratio (PDR), latency, energy consumption, and throughput, were used to analyze the performance of the selected OLSR-based routing protocols.
Figure 1 illustrates the workflow of our approach.
UAVs can be used to monitor infrastructure for livestock, historic sites, or forest fires in difficult-to-access locations. Specialized sensors for geological surveys could also be installed on the UAVs. As with any other connected device, UAVs are vulnerable to attack. They could also threaten our physical, digital, and personal security [
10]. Notably, suppliers use implementation or design secrecy as their primary means of system security. As a result, attackers may “simply” take control of a UAV using common “hacking” tools to prevent it from carrying out its missions or, worse still, inflict damage. Aside from UAV hijacking, the majority of UAVs capture and retain data locally. Often, data that are stored is not encrypted, and even data that are transmitted wirelessly (such as telemetry) can be readily overheard by outside parties. It is noteworthy that UAVs, as new gadgets, are equally susceptible to “normal” Internet attacks if they are connected to the Internet. Thus, there is a pressing need to strengthen UAV security [
11].
The remainder of this paper is structured as follows:
Section 2 discusses related works.
Section 3 presents the differences between OLSR, D-OLSR, ML-OLSR, and P-OLSR.
Section 4 elaborates on the study methodology, simulation setup, simulation scenarios, and performance measurements.
Section 5 presents the simulation results and their related discussion, while
Section 6 concludes the paper.
2. Related Works
Various studies [
12,
13,
14,
15,
16,
17,
18] focused on developing and analyzing the performance of routing protocols for UAV ad hoc networks, or FANETs. In [
12], the author analyzed routing protocols such as the Ad hoc On-Demand Distance Vector (AODV), Destination-Sequenced Distance Vector Routing (DSDV), Dynamic Source Routing (DSR), OLSR, the Ad hoc On-Demand Multipath Distance Vector (AOMDV), and the Hybrid Wireless Mesh Protocol (HWMP) to evaluate their performance in FANETs during real-time operations. Using NS-2 for simulation-based evaluation, it was determined that HWMP and OLSR have the best behavior outcomes in the dynamic settings of FANETs. OLSR has lower overhead costs than HWMP. Therefore, more work must be conducted to minimize overhead.
In [
13], the authors examined QoS metrics for AODV, OLSR, and HWMP routing protocols in FANETs using the simulation program NS-3. They evaluated proactive, reactive, and hybrid algorithms based on hop count, PDR, Goodput, and overhead metrics for source-to-destination transmission across a swarm of UAVs. The Gauss-Markov (GM) Mobility Model was utilized to mimic the behavior of UAVs inside a swarm. The simulated area ranged between 250 and 750 m, and the size of the UAVs was variable. In every simulation scenario, the average QoS metric was determined.
In [
14], the authors thoroughly evaluated standard ad hoc routing protocols for FANETs, including OLSR, AODV, DSR, the Temporally Ordered Routing Algorithm (TORA), and Geographic Probabilistic Routing (GRP). Using a network simulator (OPNET 17.5), the performance of these protocols was examined. Further, the performance of protocols was compared based on the ratio of packets, delay, number of hops, and throughput for various movement speeds and mobility models. Across all evaluation scenarios, the simulation results showed that OLSR and GRP perform better on average than AODV, DSR, and TORA. Their study demonstrates that the variation in network structure, resulting from the relative speeds of nodes, is the primary driver of network performance fluctuations.
In [
15], the authors simulated the performance of UAV communication networks with several routing methods and network environments and assessed the results. Through the simulation of four types of UAV communication network routing protocols (AODV, DSR, OLSR, and GRP), the metrics of latency, traffic received, dropped data, and throughput were compared. The simulation findings indicate that OLSR has reduced network latency and greater throughput, while the routing protocol of DSR has higher traffic received and the routing protocol of AODV has fewer data lost. Diverse routing algorithms have varying performances in UAV ad hoc networks depending on the UAV density and UAV flying speed.
In [
16], the authors evaluated the effectiveness of four topology-based routing protocols (DSR, AODV, GRP, and OLSR) by using the simulation program OPNET 14.5. Several metrics, including delay, throughput, and data loss rate, were utilized in performance evaluation. The authors also suggested an enhanced version of OLSR (E-OLSR) by adjusting parameters and decreasing holding time. In the simulation, the optimized E-OLSR settings outperformed the standard OLSR, making it acceptable for usage in UAV ad hoc network (UANET) scenarios. Simulation findings showed that E-OLSR outperforms the classical OLSR and trumps the other protocols discussed in their study. In terms of latency, the OLSR protocol outperforms the Ad hoc On-Demand Distance Vector (AODV) protocol.
In [
17], the authors suggested the Cross-Layer and Energy-Aware AODV (CLEA-AODV) routing algorithm to enhance FANET efficiency. The three primary components of the CLEA-AODV protocol are: (1) cooperative medium access control, (2) glow swarm optimization (GSO), and (3) forwarding with the AODV protocol (MAC). Packet Success Rate (PSR), Throughput (TP), End-to-End (E2E) Delay, and Packet Drop Ratio (PDR) are the main factors that were taken into account when evaluating the efficiency of the FANET. The CLEA-AODV protocol was implemented, and the network efficiency was evaluated using the NS-2. The simulated findings demonstrated that the CLEA-AODV outperforms the AODV and SOC-GSO protocols in terms of PSR, TP, E2E delay, and PDR. In [
18], the effectiveness of various proactive, reactive, and hybrid routing algorithms, including DSR, ZRP, AODV, and OLSR, were analyzed in two disaster scenarios in order to evaluate FANET performance. In the first situation, when the infrastructure network is expected to be harmed, UAVs link mobile ground stations. In the second situation, drones send video from search and rescue operations to GCS. Simulation-based testing was performed using the Netsim emulator, and it was demonstrated that OLSR and AODV perform well in disaster cases in the dynamic environments of FANETs. In both situations, DSR routing algorithms have the lowest routing overhead.
The OLSR protocol provides a routing table prior to the routing process by exchanging a message about the link’s state, whereas AODV is reactive to route requests and begins route discovery, which increases latency [
19]. Consequently, OLSR satisfies the critical requirement for real-time UAV communication, such as in SAR operations, which have specific requirements such as reliable data delivery and low latency.
Table 1 presents a comparison of related studies and explains how our study differs from these prior works.
OLSR-based routing protocols adopt the OLSR mechanism that can support SAR operations by delivering transmission packets with minimum delay. As mentioned earlier, this paper evaluates and compares the performance of OLSR-based routing algorithms (OLSR, D-OLSR, ML-OLSR, and P-OLSR) in a UAV ad hoc network. We evaluated these routing algorithms in three basic SAR simulation scenarios (increasing mobility, increasing density, and increasing the functional/allowed space of UAVs) that mimic the actual world of UAVs. We used NS-3 to simulate the above OSLR-based routing protocols and replicate these SAR scenarios.
3. OLSR-Based Protocols
In this section, we present the standard OLSR protocols and the modified OLSR protocols. Further, we explain the fundamentals of the routing process, and the algorithms used to make a routing decision. Finally, we make a comparison between the four routing protocols in terms of their main feature, routing technique, and route selection mechanism.
3.1. Standard OLSR
OLSR is a proactive routing protocol that regularly shares topological data between network nodes. The objective of OLSR is to operate independently from other network protocols. In addition, OLSR does not depend on any calculations performed at the layer below it (i.e., the connection layer). OLSR is utilized in ad-hoc network families, such as MANETs [
20], VANETs [
21], and most recently FANETs [
22].
A subset of each node’s network neighbors is selected to function as multipoint relays (MPRs). Only MPRs are responsible for relaying control packets intended for dissemination throughout the whole network in OLSR. MPRs reduce the number of transmissions that are needed to send control messages, which enables them to create a reliable and effective solution. In addition, MPRs are responsible for transmitting connection state information inside the UAV network. This information is applied in route computation to generate routes between two network nodes, commencing at a source node and ending at a destination node [
23,
24].
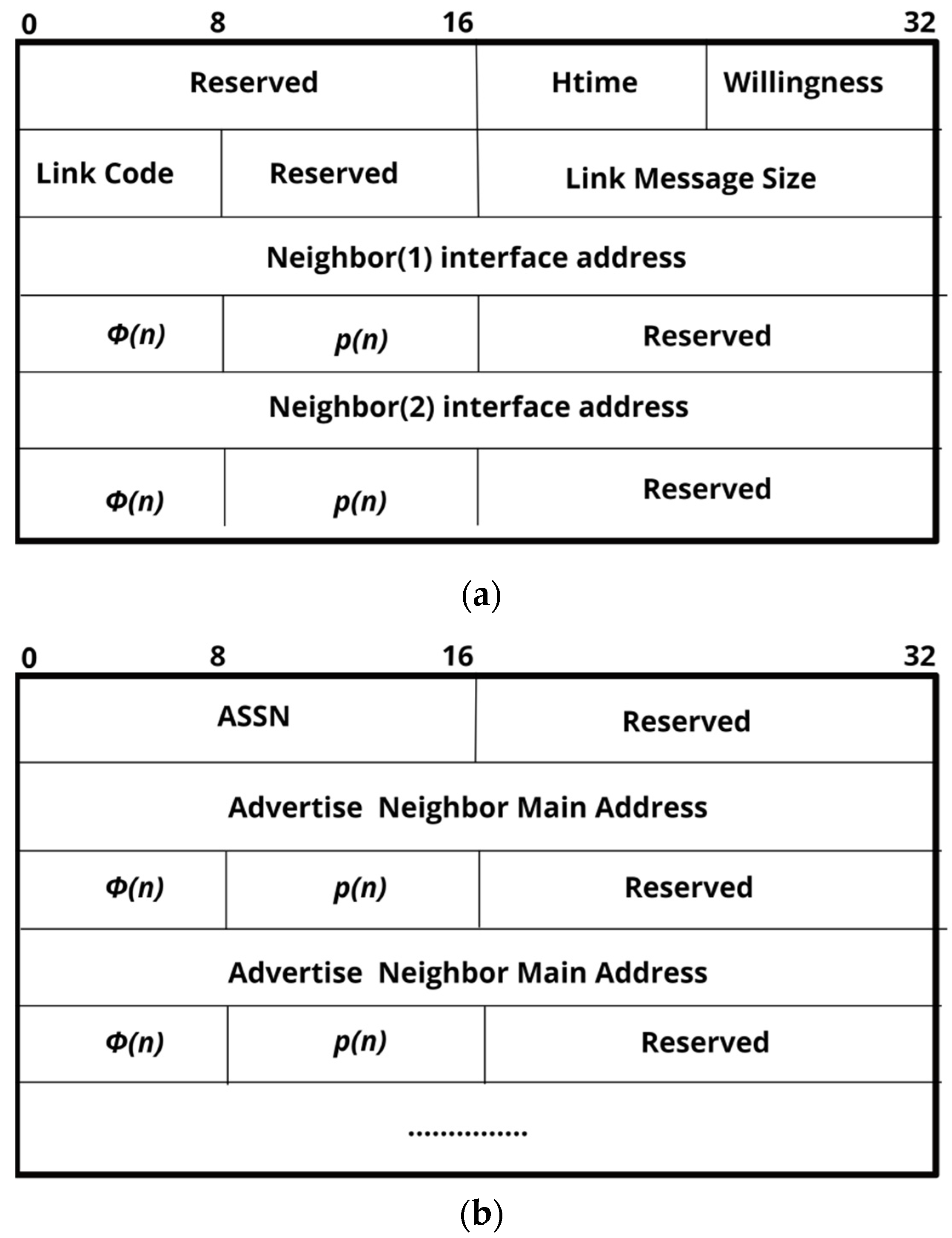
Two types of control messages are used in OLSR. These types of messages are “Hello” and “Topology Control (TC)” messages. Every node in the network receives “Hello” messages informing them of their link condition and any neighbors within two hops. To keep an essential database for packet routing, each node in the network broadcasts TC messages. By responding to events with TC messages and decreasing the maximum periodic time interval, OLSR is routinely optimized [
19].
Figure 2 shows the formats of the “Hello” and “Topology Control (TC)” messages.
Trajectory-aided OLSR (TOLSR) [
25] is a recent routing protocol that utilizes the trajectory of UAVs as a known factor to improve optimum link-state routing. In TOLSR, Q-learning is used to determine the optimal network path. The authors [
25] presented a packet-forwarding mechanism to alleviate a typical problem encountered by UAVs, namely, deteriorating image quality. The simulation results [
25] showed its significant advantages over OLSR and greedy perimeter state routing (GPSR) in a sparsely distributed environment. The PDR was improved by more than 30%, and the end-to-end latency was reduced by more than 40 s. MATLAB software was used to implement many SAR simulation situations.
3.2. D-OLSR
The Directional Optimized Link State Routing Protocol (D-OLSR) [
26] is a routing protocol for UAVs with directional antennas. This protocol’s major emphasis is the MPR execution, making it its most significant component. The D-OLSR protocol tries to limit the amount of MPR in the network in order to reduce latency and route overhead [
26].
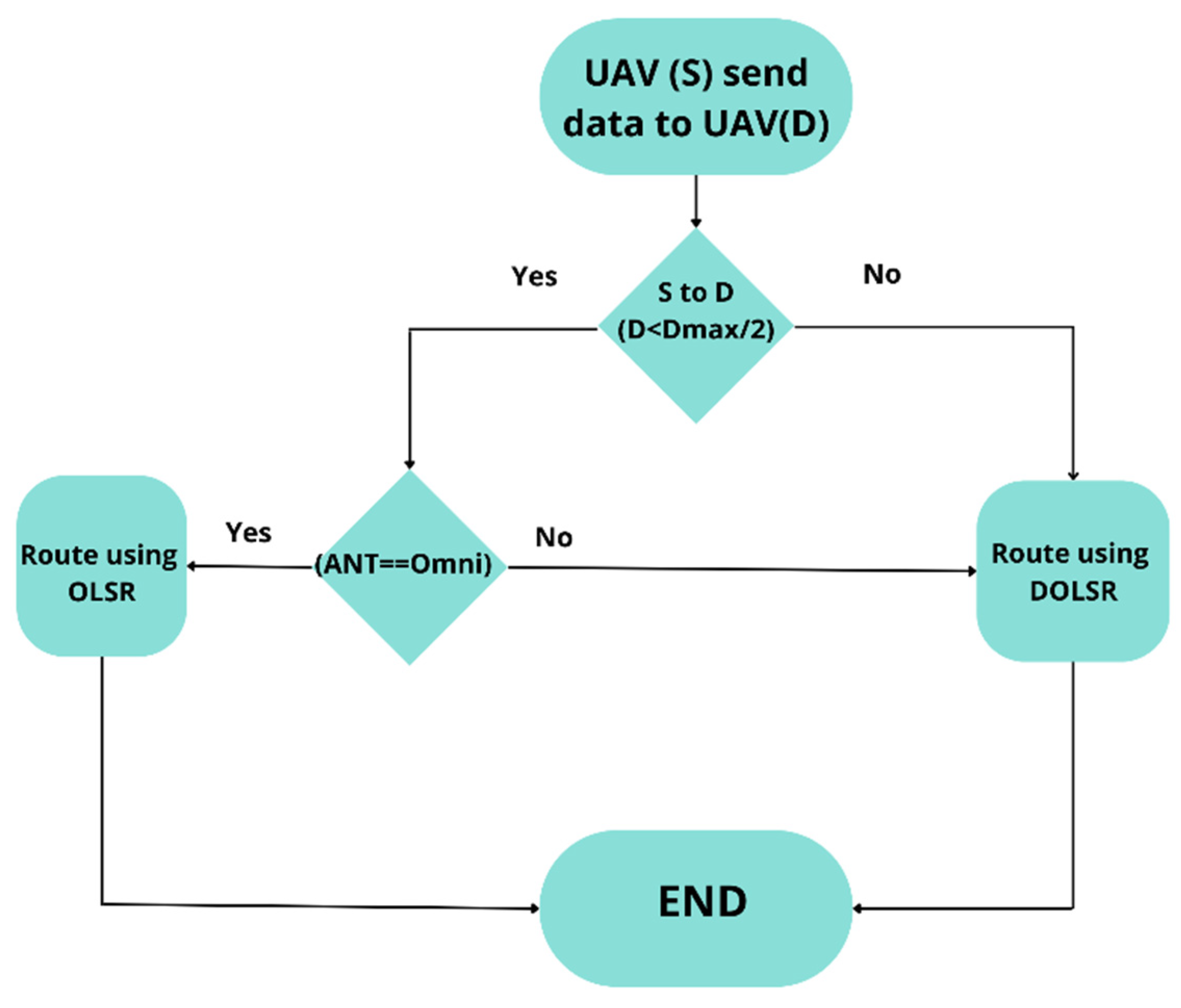
Figure 3 depicts a flowchart for the D-OLSR routing protocol.
The UAV will employ D-OLSR with a directional antenna if the distance between the UAV point and the destination UAV is greater than
Dmax/2(the maximum distance that the directional antenna can cover). Nonetheless, if the distance is less than
Dmax/2, the UAV will switch to the standard OLSR if an omni-directional antenna is available; otherwise, it will revert to the D-OLSR [
26].
3.3. ML-OLSR
The Mobility and Load Aware OLSR (ML-OLSR) [
27] was developed to mitigate the impact of high mobility and load imbalance on UAV network performance. The ML-OLSR protocol contains both mobility-aware and load-aware algorithms. Several simulated scenarios were used to evaluate the algorithms and modeling components of the ML-OLSR protocol [
27]. Two mobility-related metrics comprise the mobility-aware algorithm:
- (1)
Stability Degree of Node (SDN);
- (2)
Reachability Degree of Node (RDN).
SDN evaluates the connectivity between two UAVs. A UAV utilizes its GPS data to develop a mobility-aware UAV node. The neighboring UAV gives position information to the UAV, allowing the UAV to determine the distance between the two UAVs. Using statistical information about the distance and the following SDN function, the connection stability for the link between two UAVs is computed using Equation (1):
where
d is the distance between UAV
A and UAV
B, and
n is the number of neighbor UAVs,
i is the counter number for neighbor UAVs. Neighbor UAVs communicate with UAV
A via messages that contain GPS data so that UAV
A may determine the distance between UAV
A and the neighbor UAVs. After receiving a message from neighbor UAV
, the UAV
A calculates
, then selects the more stable neighbor UAV. The neighbor UAV with the lowest
is the most stable. When two UAVs have the same value of
the neighbor with the shortest message exchange distance is deemed to be more stable.
RDN refers to the degree of accessibility only for stable UAV nodes. As mentioned previously, the reachability level of a UAV node represents the weight of the UAV nodes, and the stability level of a UAV SDNAB represents the weight of the connection between UAV nodes A and B. When the MAC layer of IEEE 802.11 cannot deliver packets promptly, the packets are stored in the buffer. If more packets are waiting, the greater the load becomes. The quantity of nearby UAVs immediately affects the PDR and transmission delay. To increase the data communication efficiency of the UAV ad-hoc network, the load-aware algorithm of UAV nodes is essential.
Equation (2) is used to determine the load of nodes:
where
Load_factor denotes the load on node
i;
MAC_factori is the node’s own load; and
Nei_factori denotes the load on neighboring nodes.
Equation (3) can be used to describe the load along the whole route:
Path_factor is the total load on the route from the source UAV to the destination UAV.
3.4. P-OLSR
Predictive-OLSR (P-OLSR) [
28] is a variant of OLSR that predicts changes in the expected degree of wireless communication quality across UAV nodes in FANETs. It utilizes GPS data typically provided by the UAV’s autopilot system. P-OLSR is the only routing technique currently supported on Linux for FANETs. Real-world testing and simulations of the MAC layer were utilized to determine the P-OLSR performance. For the studies, the authors [
28] utilized a testbed comprised of two autonomous fixed-wing UAVs and a base station.
The standard OLSR design does not take into account the quality of the wireless connection. A hop count measure is utilized for route selection, despite being insufficient for wireless mobile networks. The OLSR link-quality extension can take the quality of wireless networks into account by using the
expected transmission count (ETX) option [
29]. The ETX metric is defined as:
where:
R is a network route connecting two UAV nodes, and n is a hop of the route R;
Φ(n) is the possibility that a packet delivered over hop n would be successfully received and is also called the forward receiving ratio;
p(n) is the possibility of successfully receiving the matching acknowledgment (ACK) packet and is also called the reverse receiving ratio;
ETX calculates the number of transmissions and re-transmissions that will be required to deliver a packet from its source to its destination. Then, OLSR chooses the route with the lowest ETX, which is not always the option with the fewest hops [
28].
The network topology is continually changing, and a wireless connection between two UAVs might fail unexpectedly. The
ETX measure may be insufficient in these networks since it is not reactive enough to track link fluctuations. To address this issue, the
ETX measure was modified to consider the UAV’s location and orientation in relation to its neighbors. The
ETX(
n) measure of the hop
n between nodes
i and
j is weighted by a factor that compensates for the relative speed between
i and
j, as shown below:
where
vli,j is the relative speed between nodes
i and
j and
β is a non-negative parameter. The ETX will be adjusted by a factor less than 1 when the UAVs
i and
j travel closer to one another and the relative speed turns negative. Alternatively, if UAVs
i and
j move apart from one another, the relative speed is positive, meaning that the ETX will be adjusted by a factor greater than 1 as long as this is the case. To put it another way, even if two nodes have the same values for
Φ and
p, it is preferable to hop between nodes that move closer to one another rather than ones that move farther away.
3.5. Summary of OLSR-Based Protocols
Table 2 presents the similarities and differences between standard and modified OLSR protocols. Based on this comparison (
Table 2), it can be stated that the original OLSR protocol’s limitations consist of a delayed reaction to frequent changes in network topology and do not consider the quality of wireless communications between UAVs. On the other hand, the proactive part of routing protocols gives the route before the routing process. In addition, the enhanced OLSR protocols give superior performance to the original OLSR because they take into account additional metrics, such as ETX (for selecting the MPRs for UAVs) and mobility and load-aware algorithms (for forwarding data packets to the target UAV). However, as UAVs have limited energy, each of the four routing protocols must continue to account for it during the routing process.
4. Research Methodology
In this section, we present the search and rescue environments, the network simulator used, and the configuration of simulation parameters. In addition, we explain the GM mobility model used for UAVs, the simulation scenarios, and the metrics used to evaluate the performance of the four routing protocols.
4.1. Search and Rescue Simulation Environment
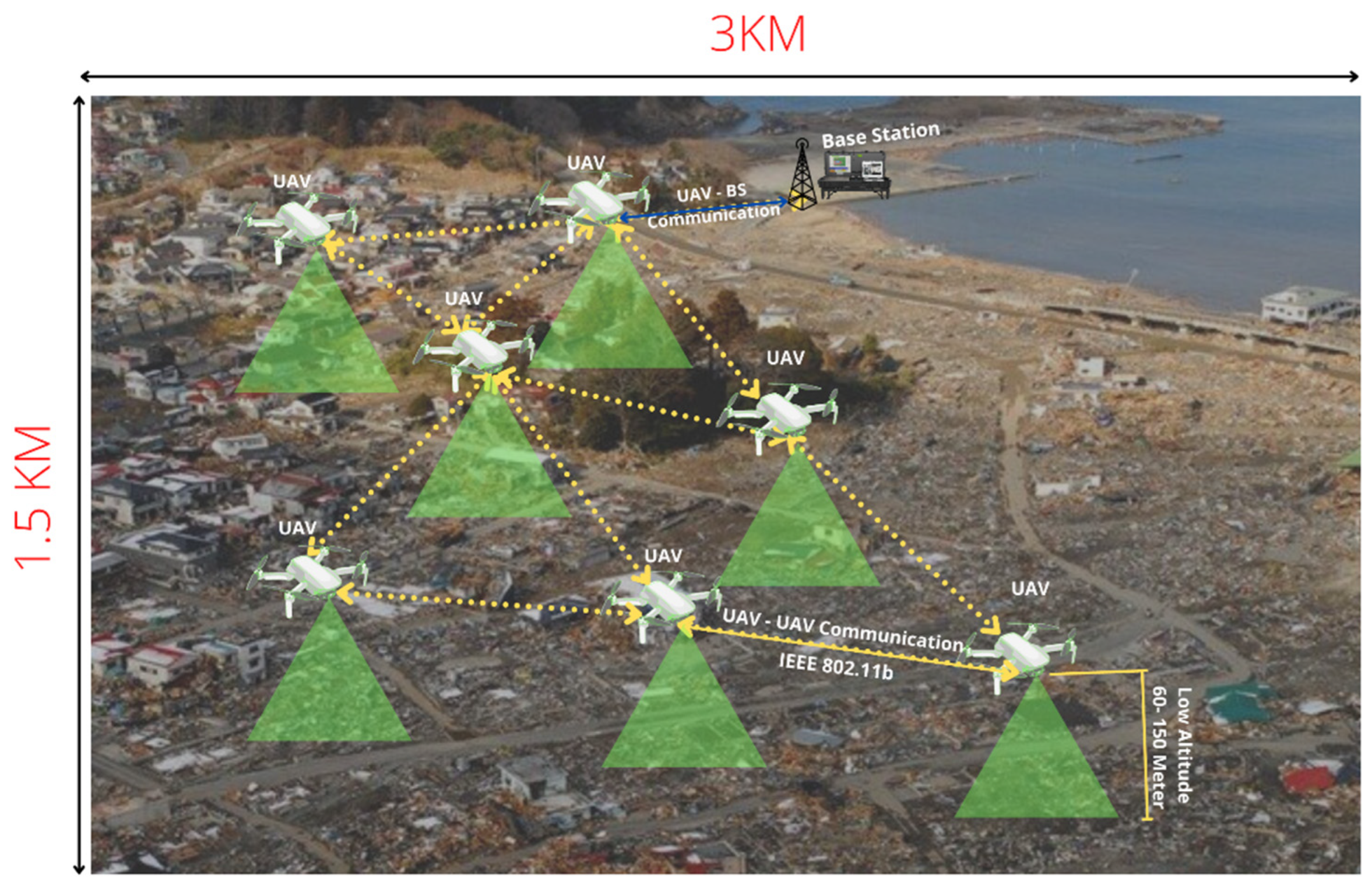
The primary application of this simulation study is a SAR operation in which a group of UAVs randomly explores a defined zone in search of a target. The ground base station is located at the edge of the simulation area, which can be found on top of
Figure 3. One of the primary objectives of SAR is to search for and report the discovery of catastrophe victims [
30,
31]. In this situation, the search is carried out by UAVs, which scan the whole region on a frequent basis. The UAVs are planned to include a straight-down camera that captures a rectangular area centered on the UAV to collect data. The UAV took pictures of the target and transmitted them to the base station so law enforcement could process them and locate the victims for prospective rescue teams. Neighboring UAVs become the relay.
Figure 4 depicts the search and rescue mission considered in this paper.
NS-3 simulator version 3.32 [
32] was used during the simulation process with the implementation of OLSR and modified OLSRs using Gauss Markov (GM) as the UAV’s mobility model [
33]. We chose the GM mobility model because it supports three dimensions of flying for UAVs during the simulation, and the NS-3 simulator includes a model for GM. For the simulation, we assumed the use of a rotary UAV, also known as a quadcopter, such as the DJI Matric 210. They can fly in all directions, take off and land vertically, and hold a stationary position in the air during the SAR. A configurable number of UAVs are dispersed randomly over the simulated region because the location of the target is unknown, so the UAV needs to search the entire area and perform Monte Carlo searches. A UAV node involved in a packet transfer might take on the role of a multi-hop wireless router or the target UAV.
To impose longer paths among UAVs than a square simulation area with such a similar UAV density would, a rectangle simulation field (3 × 1.5 km) was deployed. A simulation time of 600 s was selected as it provided enough time to reach stationary behavior. The purpose of this network design is to examine how performance is impacted by UAV mobility and density. User Datagram Protocol (UDP) was considered in this simulation as it transports data packets faster than other transport protocols, such as TCP. Further, UDP does not need to establish three-way handshakes, thus providing a minimum delay, which is required in real-time applications. Being connectionless, UDP can also broadcast packets to be received by all devices on the subnet. The packet transmission rate was set to 4 packets/sec. During the simulation, considering certain points as targets (victims), whenever a UAV comes to this location and discovers it, it only begins to transfer packets to the base station.
IEEE 802.11b was used as a MAC protocol because it is supported by the radio board of the UAV and can be applied in ad hoc communication. It supports theoretical data rates up to 11 Mbps at 2.4 GHz radio frequency. The type of antenna is set to an omni-directional antenna, and free-space path loss is chosen as the propagation model. Each UAV is configured with the simulation parameters stated in
Table 3.
4.2. The Gauss–Markov (GM) Mobility Model
The Gauss–Markov (GM) Mobility Model was first proposed by Liang and Haas [
34]. GM is inspired by the need to have a mobility model that is more realistic in the sense that, for example, a node might gradually accelerate, decelerate, or turn. The present speed and direction of a node are connected to the prior movement using Gaussian equations and tuning parameters, which use the average speed and direction as well as Gaussian random noise [
33]. We considered the GM mobility model because it supports the three-dimensional mobility of a UAV in NS-3 and is realistic to adopt in a random search for target victims in destroyed areas [
35].
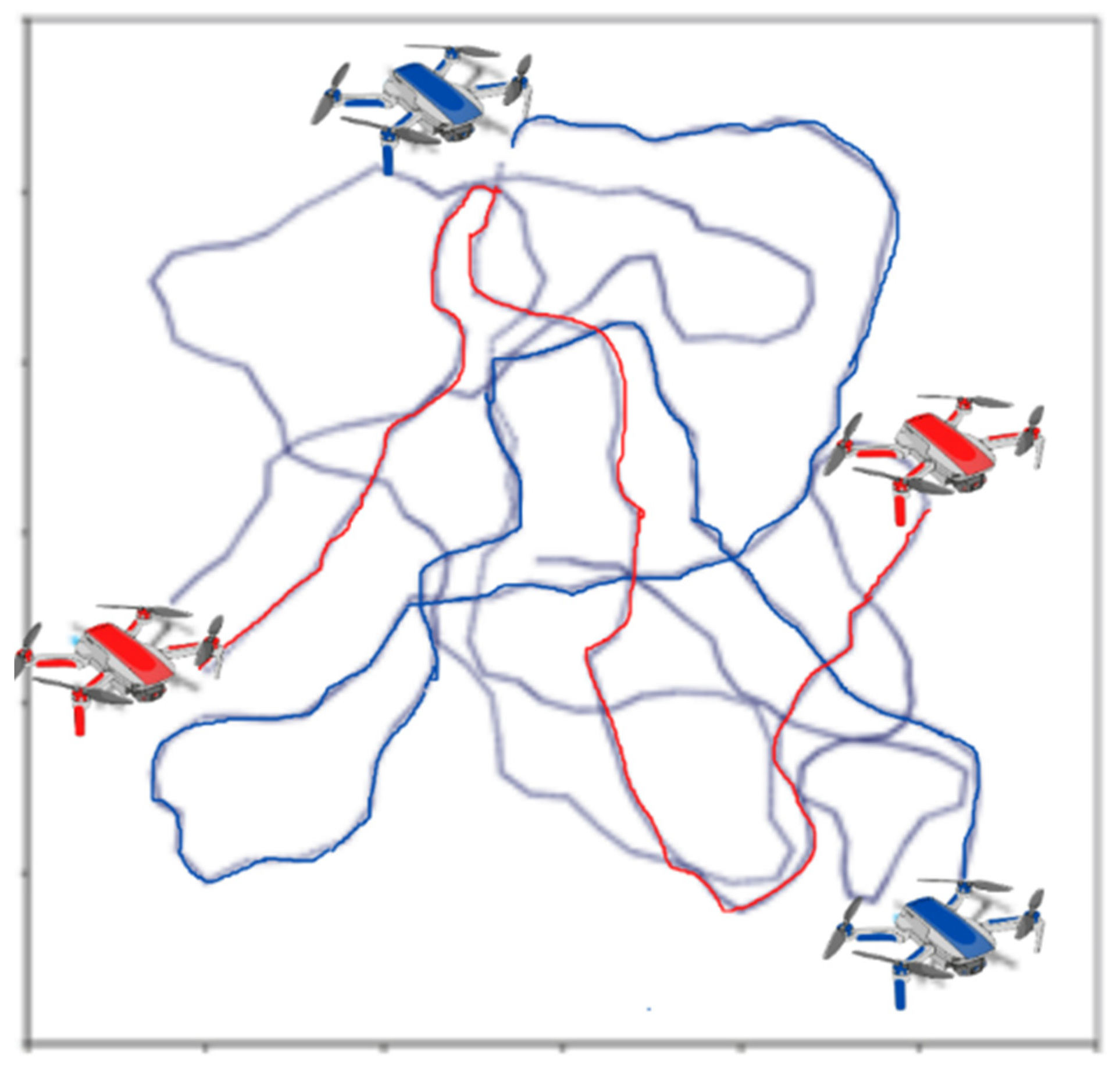
Figure 5 depicts a UAV trajectory generated using the GM model. At the beginning of the simulation, each UAV is configured with its current speed and direction while following the GM trajectory with a bird curve. Then, after a period, each UAV updates its velocity and direction. The GM model is capable of reducing the abrupt stops and sharp turns observed in random mobility models.
4.3. Simulation Scenarios
Three simulated scenarios were created in this research study to evaluate the efficacy, strengths, and shortcomings of regular OLSR, D-OLSR, ML-OLSR, and P-OLSR in a SAR environment using UAV ad hoc networks. The scenarios are as follows:
Increasing Mobility: The first SAR scenario examines the impact of mobility by varying UAV velocities (10, 20, 30, 40, and 50) m/s over the GM mobility model. Meanwhile, the number of UAVs is set at 50. With this flying speed, either low or high, drones cover more ground in a shorter period of time than search teams on foot [
36];
Increasing Scalability: The second scenario examines the impact of network density by varying the number of UAVs (50, 60, 70, 80, and 90) over the GM mobility model. Meanwhile, the UAV’s speed is regulated at 20 m/s. In some situations, a significant number of UAVs are required to offer emergency assistance [
37]. In addition, dense networks must be considered for evaluating routing protocols;
Increasing functional/Allowed space: The third scenario examines the impact of the allowed space by varying the size of the serving area (1.5 × 3, 1 × 2, 1.5 × 3, 2 × 4, 2.5 × 5, 3 × 6) km × km over the GM mobility model. The number of UAVs is set to 50, and the UAV speed is set to 20 m/s. The altitude of UAVs is set at 100 m. For instance, in the USA and Europe, civil drones can only fly without exceeding the regulated 100 m altitude in non-segregated air spaces and must be under the direct visual line of sight of the operator [
38,
39].
4.4. Performance Metrics
This study investigates four important performance metrics to compare the reliability and effectiveness of routing protocols in the three simulation scenarios. These performance metrics are: (1) PDR; (2) latency; (3) throughput; and (4) energy consumption.
PDR displays the proportion between the number of data packets received by the destination and those that are sent by the source. The PDR measures the total number of transmitted packets to the total packet drop for all UAVs in the network during 600 s. Therefore, the PDR analyzes the network’s overall routing protocols and not an individual node. Based on the formula below, this metric is calculated as in Equation (6):
Rpkt is the number of packets received by the destination UAV.
Tpkt is the number of packets transmitted by the source UAV.
The duration of the data packet’s transmission from the source UAV to the destination UAV is known as
latency. Latency is measured by msec. It is noteworthy that a mobility model with minimum latency is required for real-time applications. The following formula in Equation (7) can be used to determine this metric:
where
Tdes is the time of reaching the data packet destination UAV;
Tsrc is the time of transmitting the packet from the source UAV.
Energy consumption is the energy consumed by the UAV during the flying mission. It includes the energy required for transmitting, receiving, forwarding data packets, and computing in a UAV. We set the initial energy for each UAV to 1 J, and then calculated the remaining energy at the end of the simulation. This way, we determined the energy consumption of UAVs employing routing protocols. Energy consumption was measured using Equation (8):
is the remaining energy at the UAV after the end of the mission;
is the source energy set up for UAV;
is the energy consumed by the UAV during its mission.
Throughput was calculated by dividing the total number of packets delivered by the destination UAV during the simulation by the simulation’s duration. Throughput is measured by bit/sec and can be expressed with the following equation:
where
Tsim is the simulation time.
5. Results and Analysis
This section presents and analyzes the simulation results for the three SAR scenarios: (1) increasing mobility of UAVs, (2) increasing scalability of UAVs, and (3) increasing the allowed space of UAVs.
5.1. The Effect of UAV Speed
To achieve the desired impact of UAV speed during the SAR mission, the speed of the UAVs can be varied. To explore the behaviors of the four distinct routing protocols in the high-speed environment, the number of UAVs has been kept constant at 50 throughout the experiment. However, their speeds have been increased to 10, 20, 30, 40, and 50 m per second (m/s).
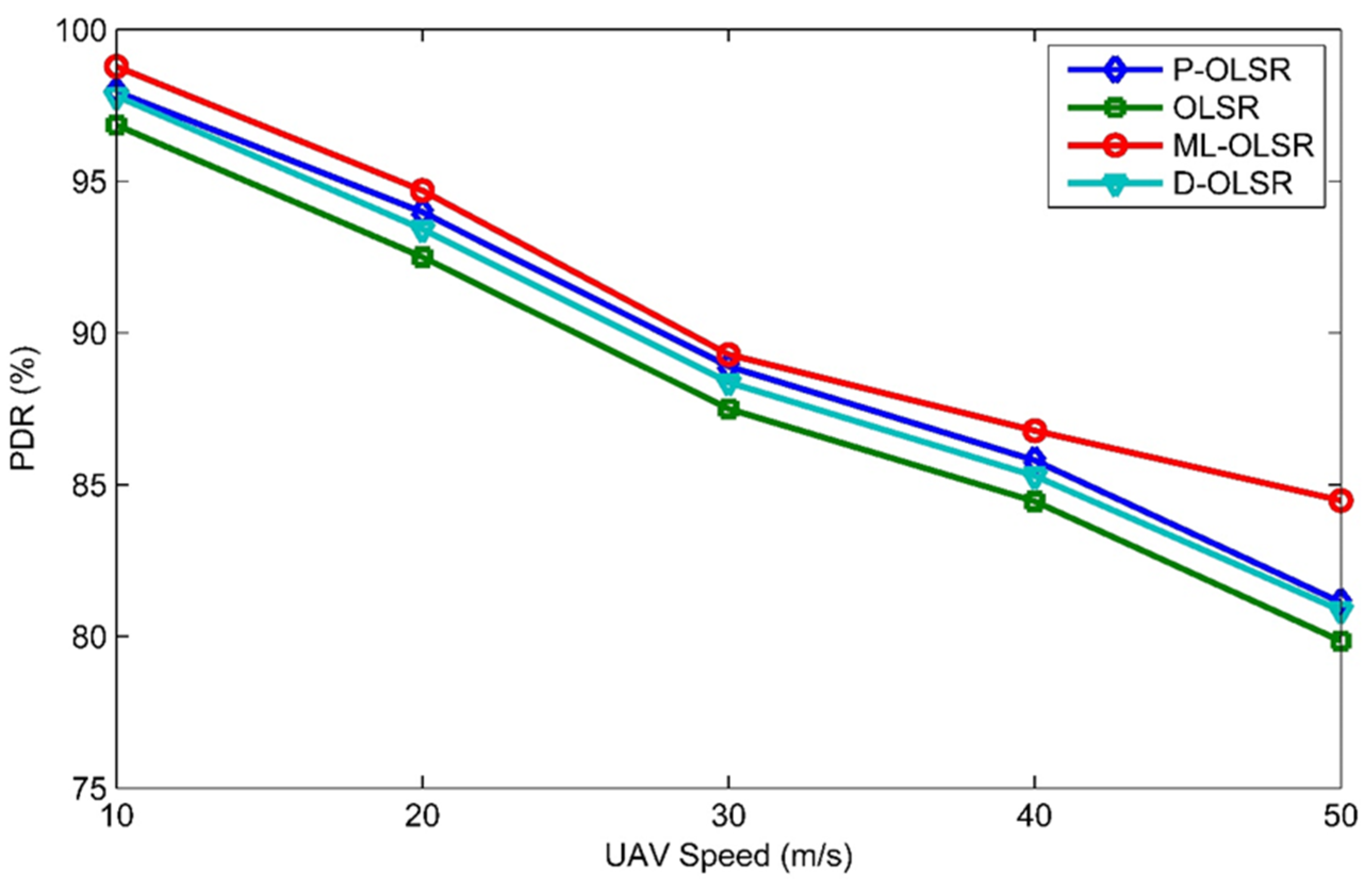
The simulation results (shown in
Figure 6) show that the ML-OLSR achieves the highest PDR when compared to other protocols at various UAV speeds. This is because ML-OLSR chooses reliable UAVs to act as MPRs in order to transmit data packets and control messages. On the other hand, standard OLSR demonstrates a subpar performance concerning PDR. P-OLSR and D-OLSR both deliver performance marginally superior to that of OLSR. Additionally, we may have seen that the PDR metrics for all routing protocols tend to fall when the speed of UAVs grows. The reason for this fact is that when the speed of UAVs increases, the network topology also changes. This results in an increased number of packets being lost.
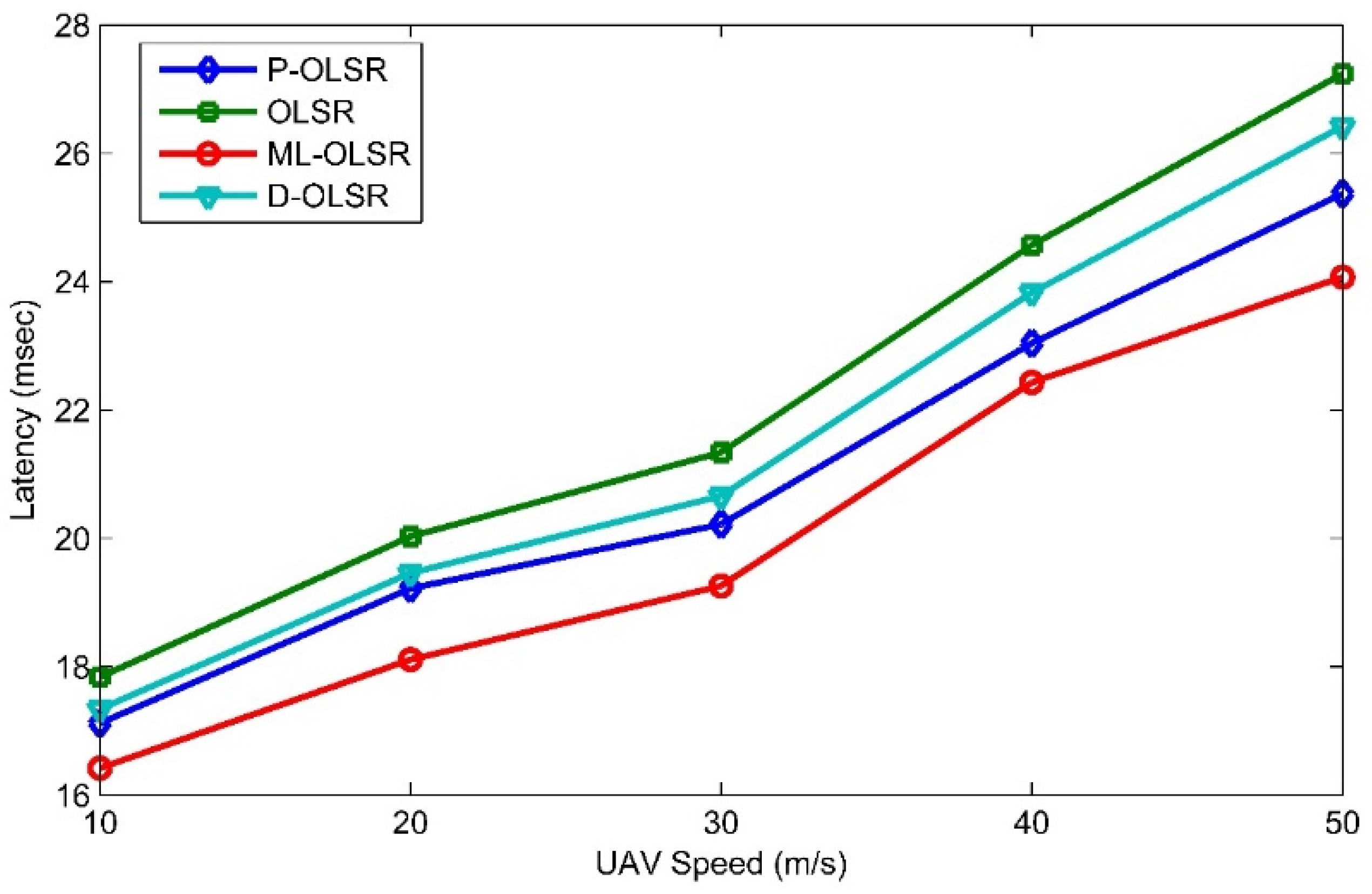
Figure 7 shows a comparison of the four different routing protocols’ performances concerning latency. The standard OLSR protocols use short path algorithms with a minimum hop to deliver packets to the destination. However, this is not guaranteed to provide a minimal delay in UAV ad hoc networks because some links are broken or lost. This demonstrates that the shortest path metric in a UAV ad hoc network is not necessarily the optimal route metric to identify the optimum path when looking for the most efficient route. As there is a lower frequency of connection failures and route maintenance, ML-OLSR and P-OLSR both have lower overall latency. As shown in
Figure 7, the amount of latency increases as the speed of the UAVs increases. This happens because when the UAV’s speed increases, the network topology changes more often, resulting in a higher rate of link disconnection and a longer route-finding phase. It is essential for the success of search and rescue operations that data packets be delivered with as little delay as possible.
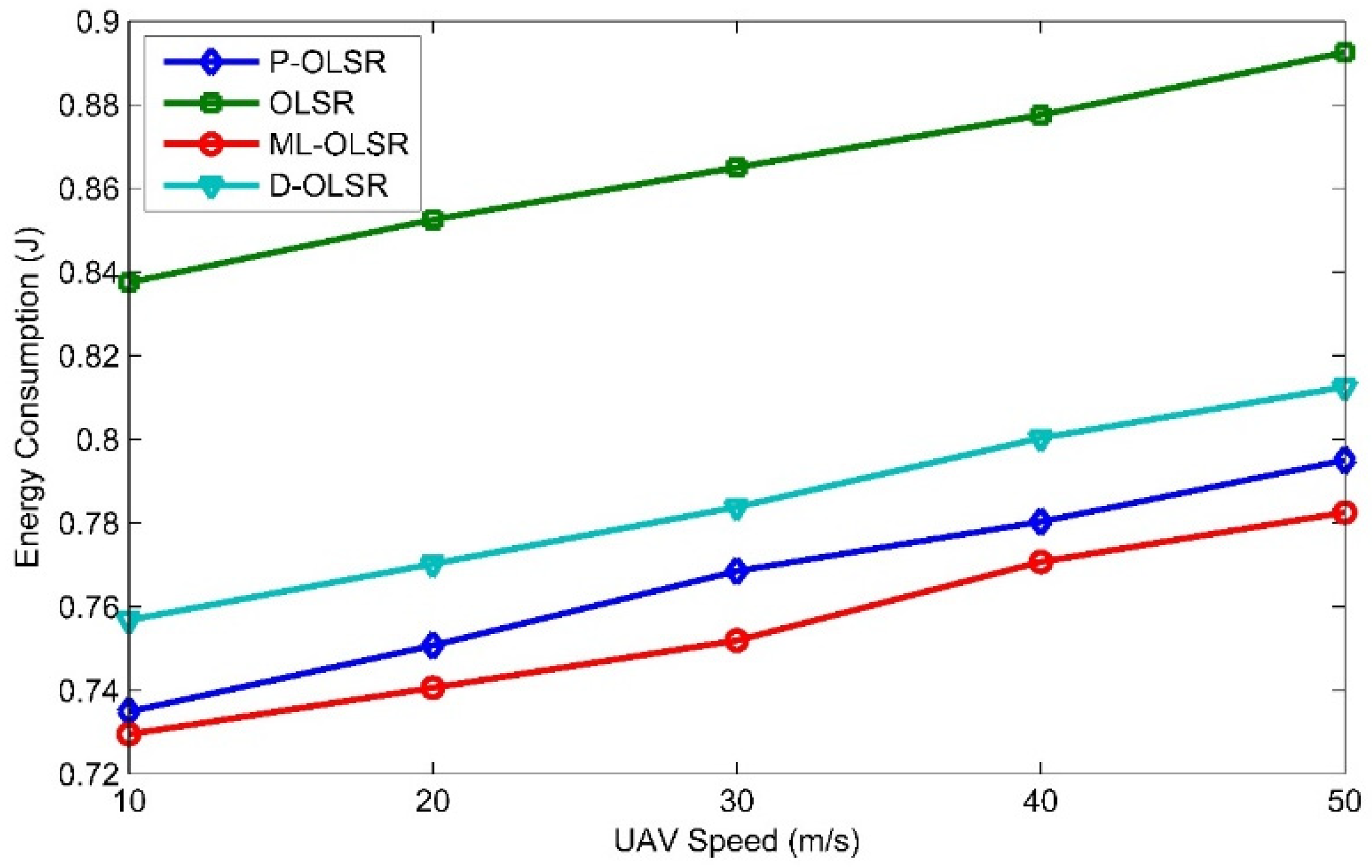
The use of energy is the third performance metric that we considered. This is an important measurement for UAV ad hoc networks since these networks have limited energy sources. When the UAV speed increases, the network topology changes in high dynamicity. This leads to link failures or network partitions. Thus, UAVs need to exchange more messages for updating network status or sending messages for maintaining or discovering routes. Therefore, more energy is required to transmit these messages.
Figure 8 shows the amount of energy consumption that the OLSR, D-OLSR, ML-OLSR, and P-OLSR all utilize. The simulation results reveal that an increase in UAV speed increases the amount of energy consumed by the four OSLR-based routing protocols. This happens because proactive protocols exchange messages periodically to ensure that the routing table is kept up-to-date and that more messages are transmitted to maintain or discover the route. The routing table is constantly accessible. In addition to this, it was discovered that ML-OLSR is superior to other protocols in terms of its ability to conserve energy. The D-OLSR protocol offers improved energy efficiency compared to the OLSR protocol. This occurs as a result of the fact that it optimizes the number of MPRs even when the distance between UAVs increases relatively.
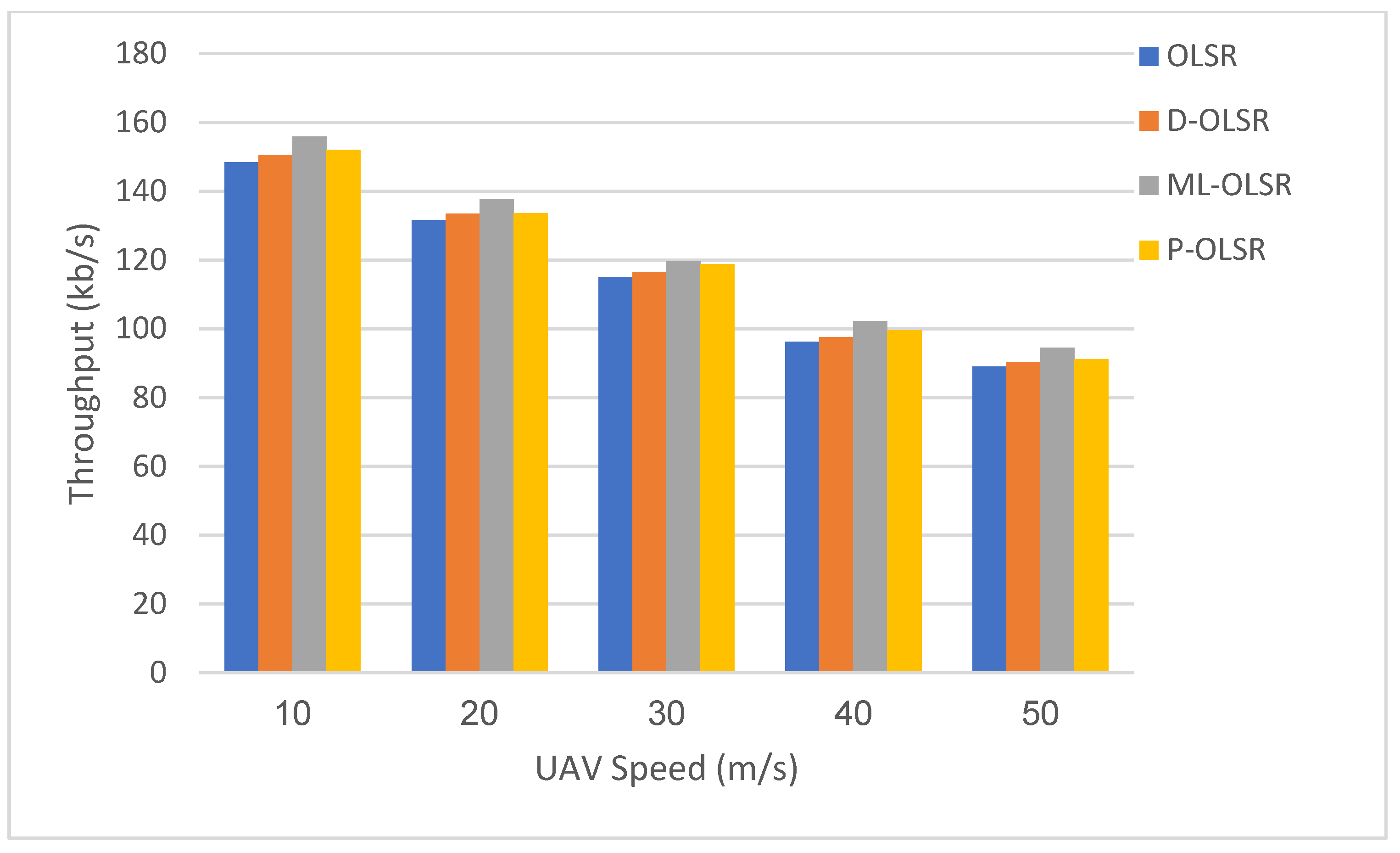
Finally, throughput may be defined as the successful reception of a data packet at its destination and is expressed in kbps.
Figure 9 presents a comparison of the throughput metrics that are used by the four different routing techniques. If the UAV’s speed is increased, the throughput value will fall since the link disconnection chance will also rise, which will result in more packets being lost. According to the results, ML-OLSR can achieve the maximum throughput compared to other protocols because it considers both the load balance and the length of the UAV queue when deciding which MPR to use. OLSR has a low throughput due to a high number of dropped packets, which contributes to the protocol’s poor performance. Compared to the D-OLSR protocol, the P-OLSR protocol can achieve greater throughput at all UAV speeds.
5.2. The Effect of UAV Density
The effect of UAV density on a SAR operation is achieved by altering the number of UAVs while keeping their speed constant at 20 m per second (m/s). The density of UAVs was changed between 20, 30, 40, 50, and 60 UAVs to examine the behavior of four distinct routing protocols in low- and high-density networks.
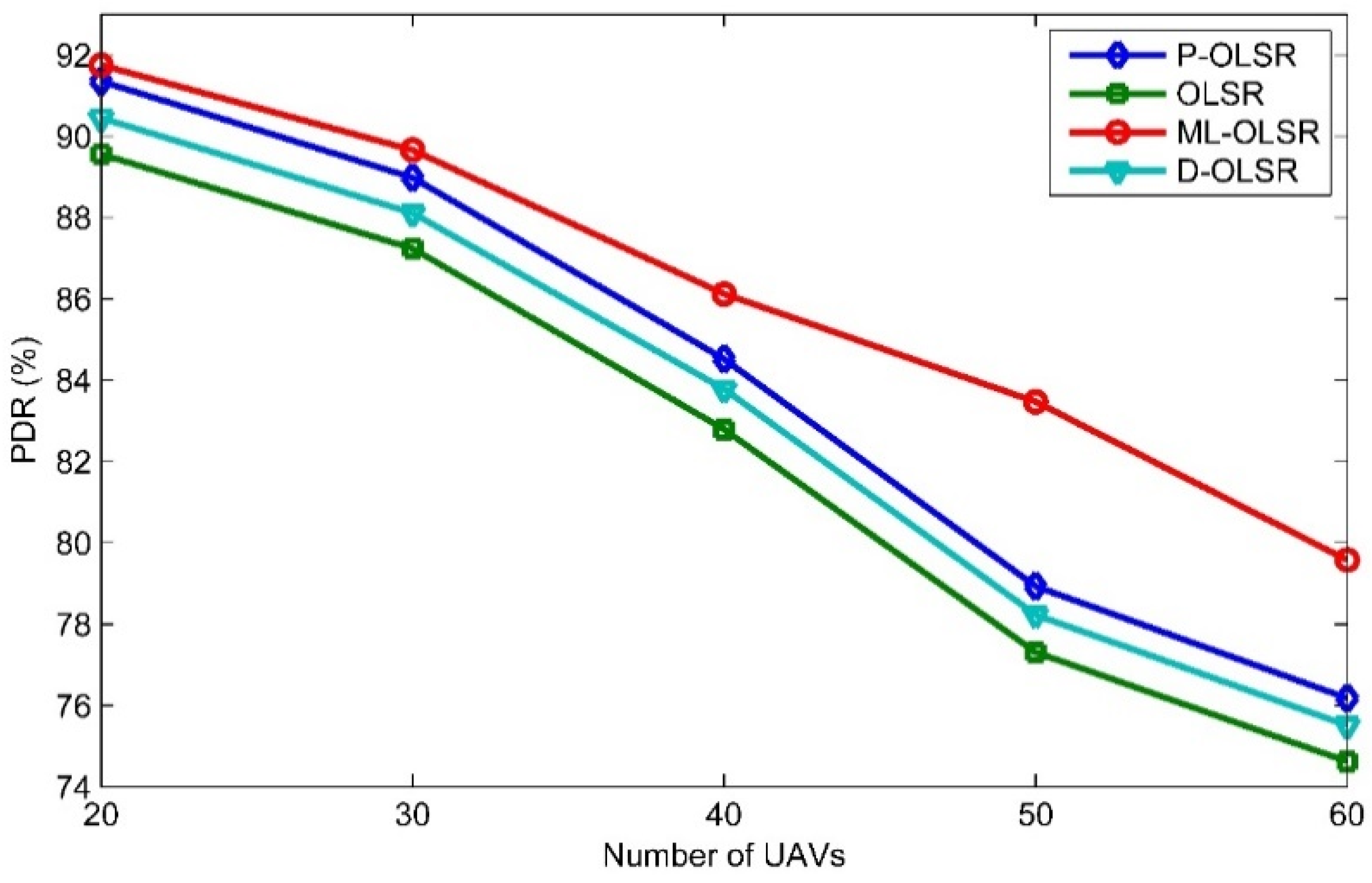
Figure 10 depicts simulation results indicating that the ML-OLSR obtains the maximum PDR compared to other protocols at varied UAV densities. This is due to the fact that ML-OLSR chooses stable UAVs as MPRs to transfer data packets and control messages. P-OLSR and D-OLSR are marginally more effective than OLSR. Similar to the mobility example, the original OLSR yields the lowest PDR values. As the number of UAVs rises, the PDR metrics for all routing protocols drop significantly. This is because as the number of UAVs increases, the network grows denser, and traffic causes packet loss to increase.
Figure 11 depicts the latency-based performance comparison of the four routing systems. As shown in
Figure 11, the latency measure for all routing protocols increases as UAV speeds increase. As the number of UAVs increases, the number of sent packets inside the UAV ad hoc network also rises, resulting in increased queue length and congestion. ML-OLSR provides a shorter latency since it takes the queue length of the UAV into account when MPR is selected. In addition, ML-OLSR provides the smallest latency at 20 UAVs. The P-OLSR and D-OLSR protocols offer superior latency in comparison to the OLSR protocol. At a network density of 40 UAVs, the four routing protocols cause a significant amount of latency.
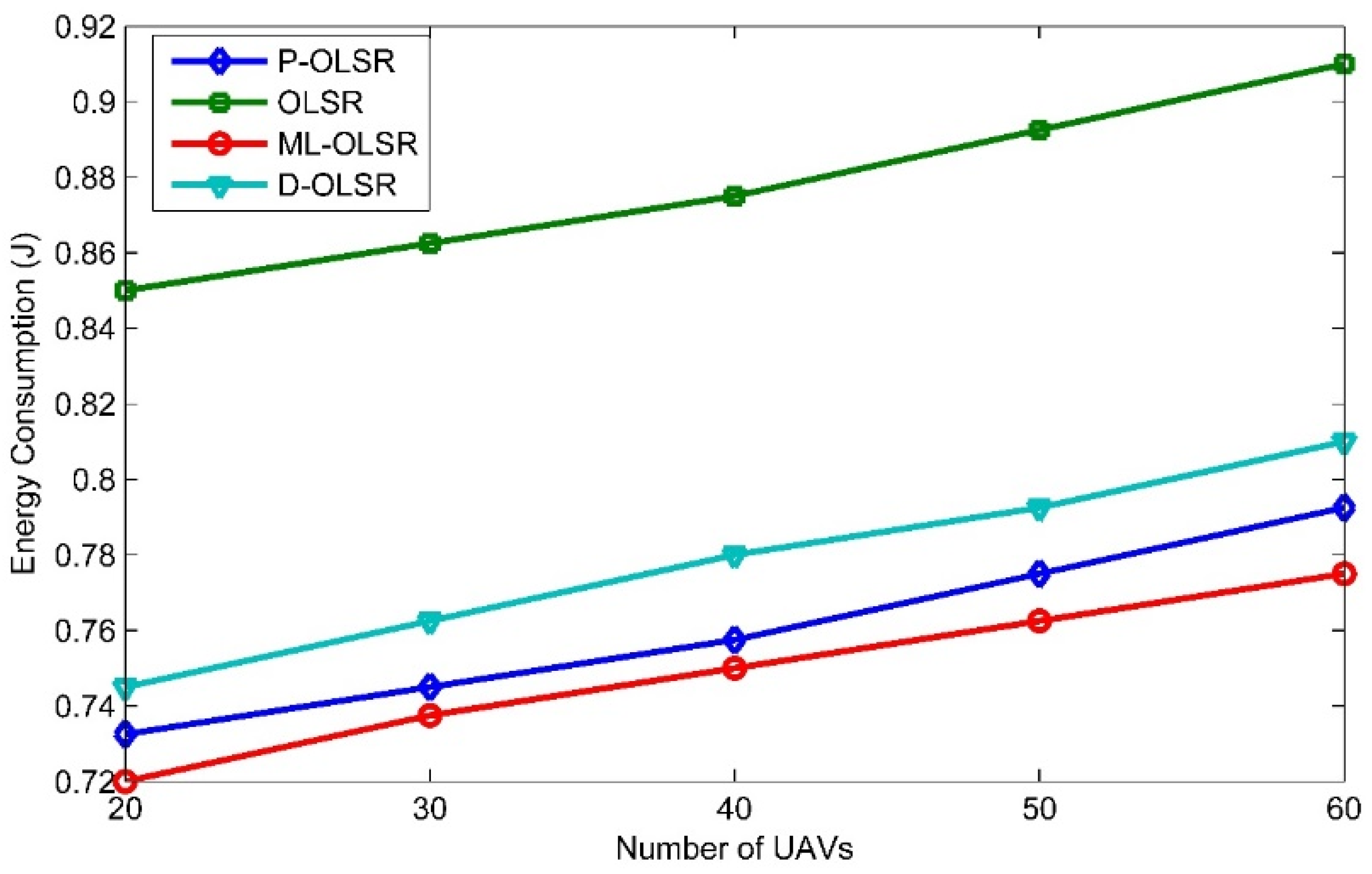
Figure 12 compares the energy consumed by the OLSR, D-OLSR, ML-OLSR, and P-OLSR. It has been shown that ML-OLSR has the highest energy efficiency compared to other protocols. P-OLSR delivers superior energy efficiency over D-OLSR and OLSR. This is because it picks up UAVs with high-quality wireless connectivity to forward data, thereby preventing link disconnection. Compared to other protocols, the OLSR protocol has the highest energy usage. Results indicate that the energy usage of the four routing algorithms increases as the number of UAVs increases. This is because the quantity of data packets and “hello” messages conveyed increases.
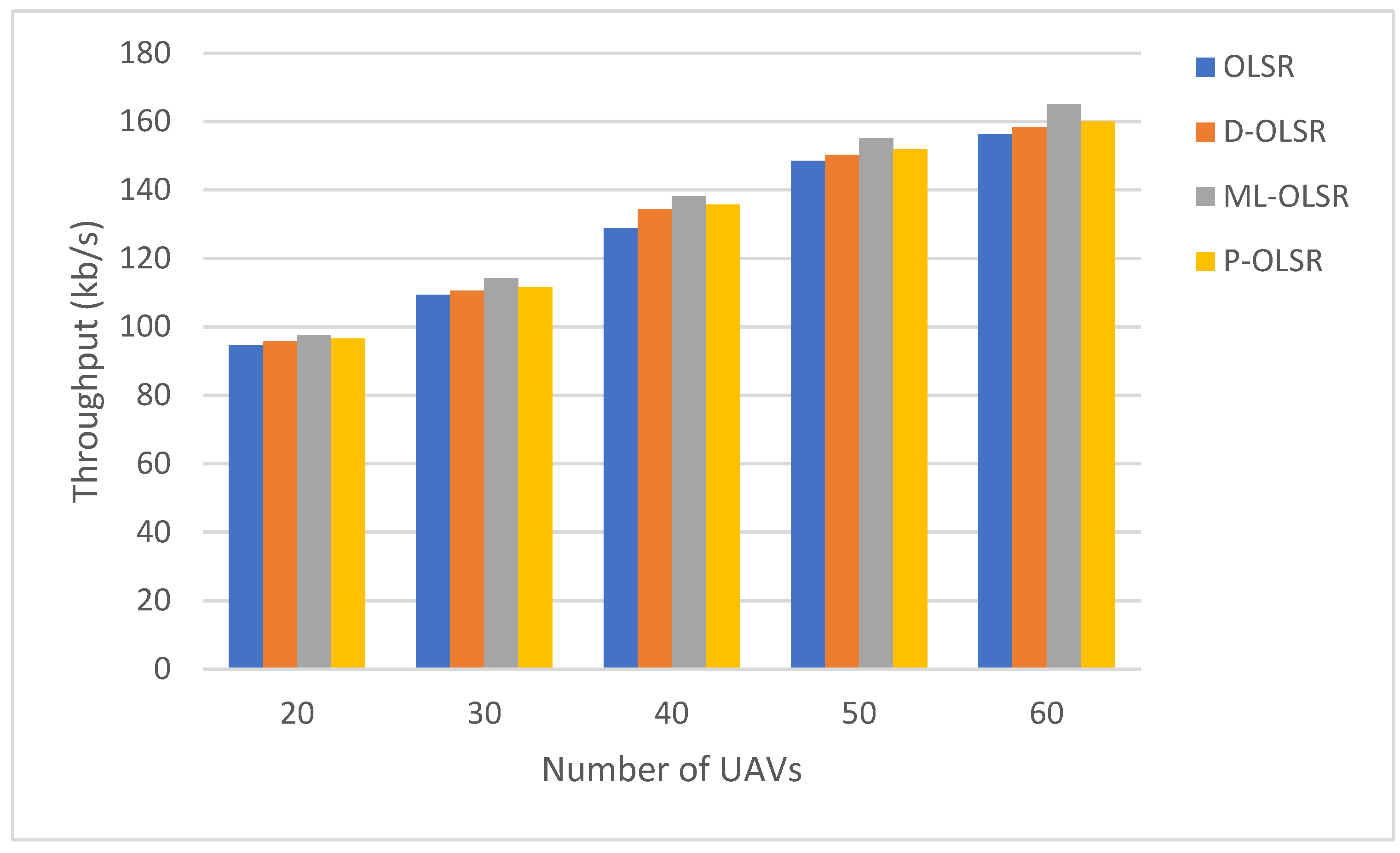
Figure 13 illustrates a comparison of the throughput metrics of four routing methods. ML-OLSR has the highest throughput compared to other protocols, according to the findings. This is a result of considering the steady and approachable UAV as MPR. If the number of UAVs rises, so does the throughput since the total number of packets also received increases. Due to a high number of packet losses, the OLSR protocol demonstrates poor throughput performance. The P-OLSR protocol delivers a greater throughput than the D-OLSR protocol.
5.3. The Effect of Allowed Space
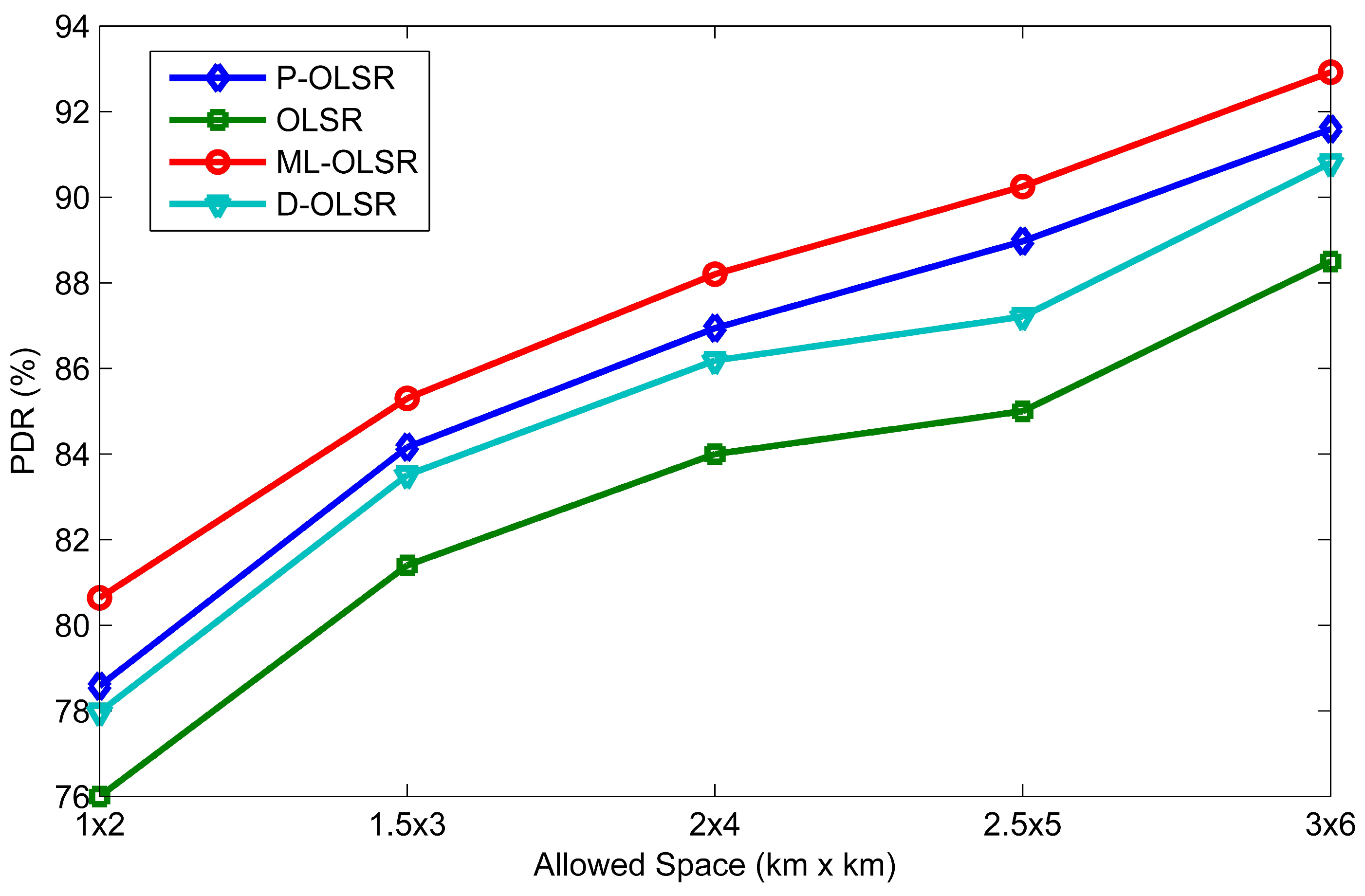
The effect of the allowed space in the simulation is carried out by varying the simulation area. The number of UAVs is set at 50, while the allowed spaces are varied to 1 × 2, 1.5 × 3, 2 × 4, 2.5 × 5, and 3 × 6 km × km to investigate the behaviors of the four different routing protocols in small and large areas. The results (
Figure 14) show that as the space of the mission (allowed space) increases, PDR increases for all routing protocols. This happens because, as the distance between UAVs increases, the number of transmitted packets decreases and the number of dropped packets also decreases. The simulation results (shown in
Figure 14) also indicate that ML-OLSR achieves the highest PDR as compared to other protocols in various areas. This happens because ML-OLSR selects the stable and reachable MPR UAV to deliver packets to the UAV’s destination. On the other hand, standard OLSR provides poor performance in terms of PDR due to increases in packet loss. P-OLSR provides slightly better PDR performance than D-OLSR, especially in areas of 2.5 × 5 and 3 × 6 km × km.
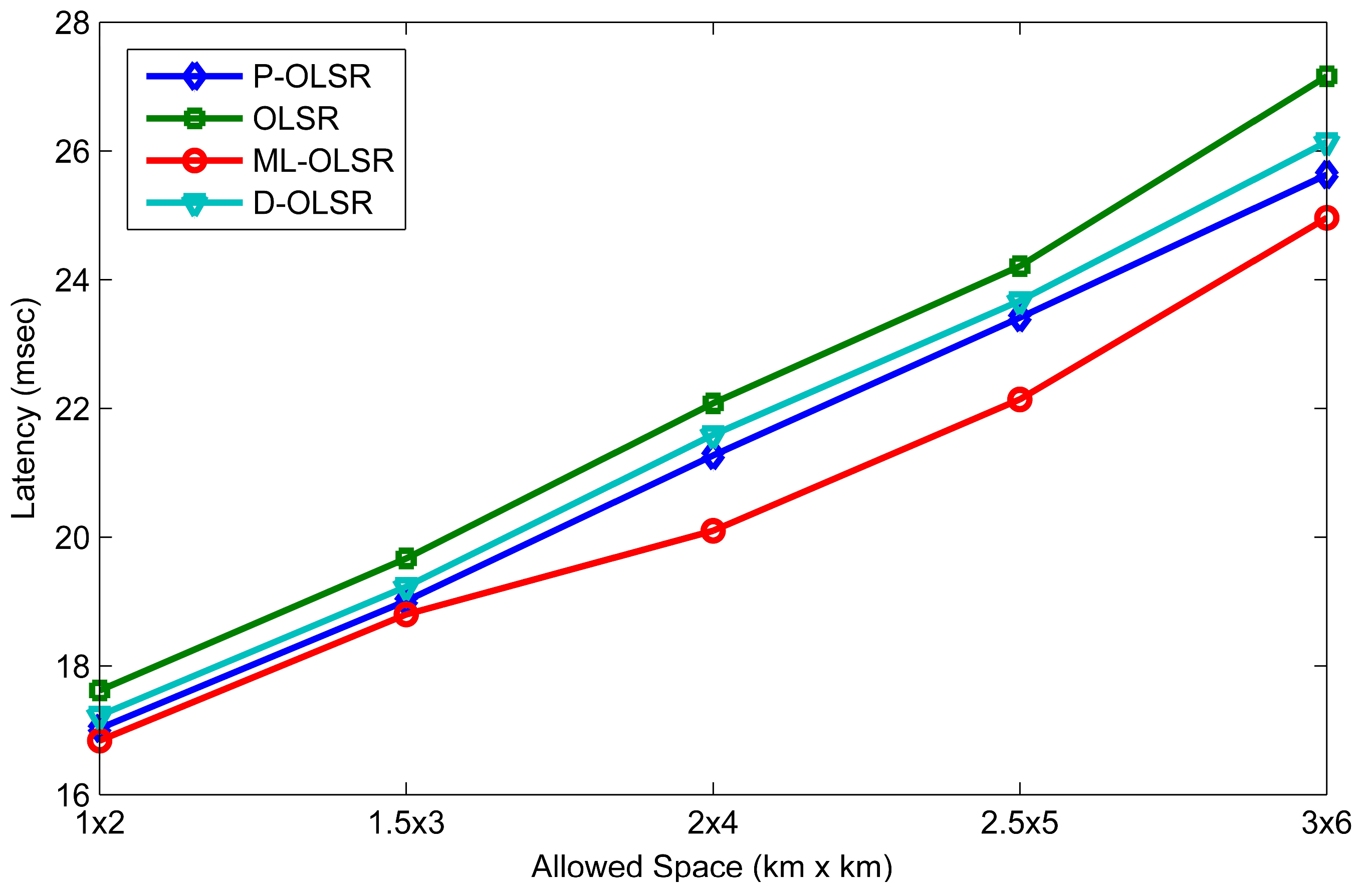
Figure 15 displays the latency performance of the four routing protocols. The latency metrics increase when the allowed space increases. This is due to the fact that as the allowed area expands, the flying UAV’s relative distance increases, increasing the propagation delay and length of time needed to deliver the data packets. According to the results, the ML-OLSR protocol provides a lower latency compared to other protocols over a large area, specifically after 2 × 4 km × km, due to the lower traffic. The OLSR protocol shows poor performance and generates the highest latency in the area of 3 × 6 km × km. The P-OLSR protocol provides lower latency than the standard OLSR protocol and higher latency than the ML-OLSR protocol. This is due to the poor prediction of wireless link quality used to select the path to the destination, leading to a decrease in route discovery.
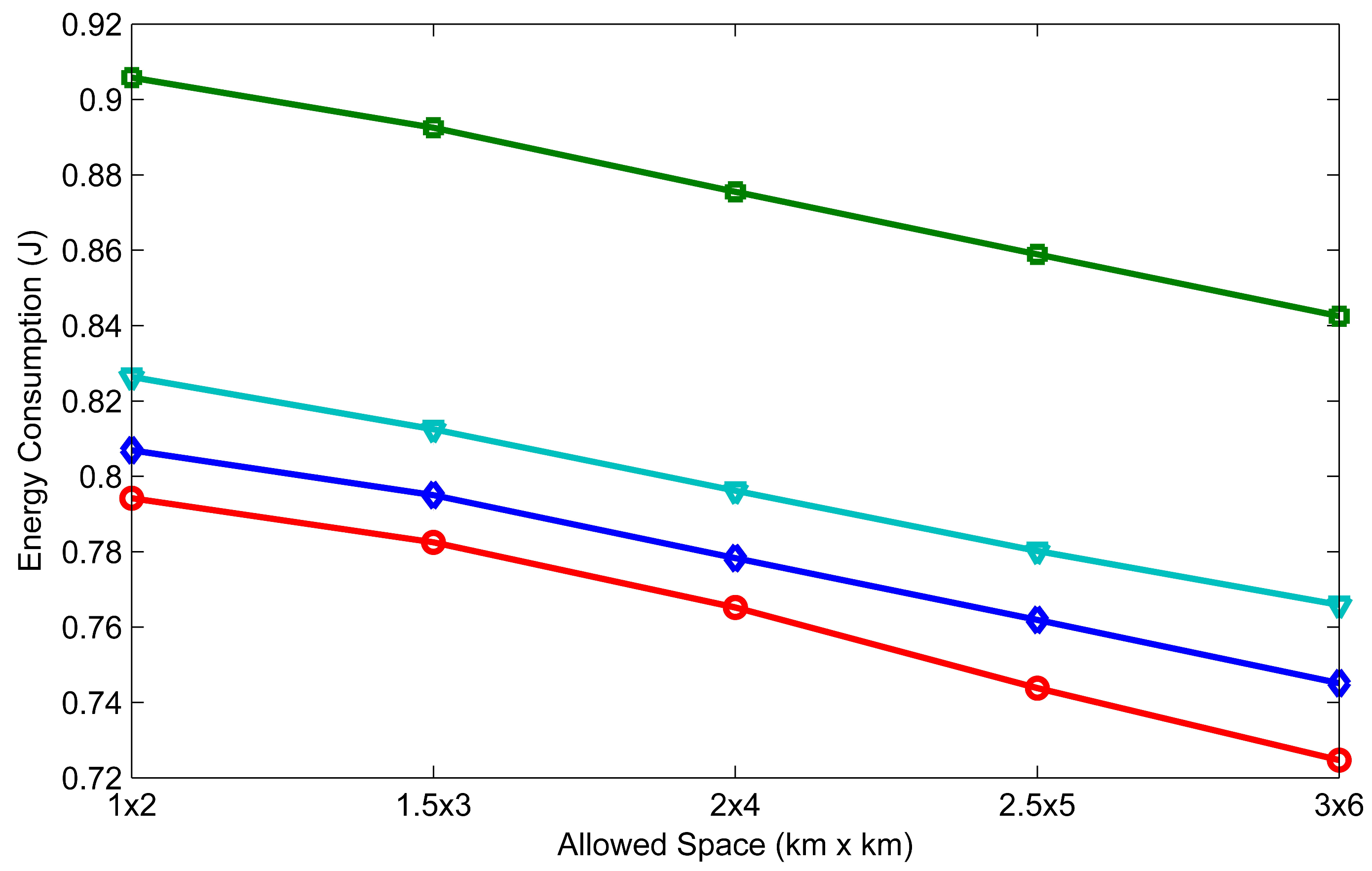
Energy efficiency should be considered when designing a routing protocol for UAVs. The comparison of energy consumed by the OLSR, D-OLSR, ML-OLSR, and P-OLSR is depicted in
Figure 16. Results indicate that as the allowed space for UAVs increases, the energy consumption for the four routing protocols decreases. This is because the number of transmitted data packets decreases, as shown in
Table 4. Further, it was noted that ML-OLSR achieves the lowest energy consumption compared to other protocols for various allowed areas. D-OLSR provides better energy efficiency than the OLSR protocol as it reduces the number of overhead packets by selecting a minimum MPR.
Figure 17 illustrates a comparison of the throughput of the four routing protocols. If the allowable space for UAVs increases, the throughput value drops because the distance between UAVs increases and some UAVs fall out of transmission range, resulting in fewer packets received. Results indicate that ML-OLSR obtains the highest performance compared to other protocols in a low-congestion UAV environment, increasing the number of data packets received. The OLSR protocol, on the other hand, has poor throughput performance due to its high packet loss. In all allowed locations, the P-OLSR and D-OLSR protocols achieve better throughput than OLSR.
5.4. Summary and Comparative Analysis
Table 5 briefly summarizes the simulation results found about the performance of the OLSR, D-OLSR, ML-OLSR, and P-OLSR protocols in terms of PDR, latency, energy consumption, and throughput. The effectiveness of the four routing protocols was evaluated with regard to UAV mobility, scalability of UAVs, and allowable space situations, respectively.
Based on
Table 5, we conclude that ML-OLSR, followed by P-OLSR, has the most outstanding performance across all three-use scenarios for a UAV that is used in search and rescue operations. The higher performance of ML-OLSR may be explained based on the mobility-aware algorithm and how it chooses appropriate MPR UAVs. This is the reason why ML-OLSR is so effective. In addition, it uses a load-aware algorithm, which ensures that only routes with a low volume of traffic are evaluated for the transmission of data packets to their final destination UAV. In the meantime, the P-OLSR protocol uses ETX measurements to predict the quality of the wireless link between UAVs to choose the optimal path.
6. Conclusions
UAV ad hoc networks offer a variety of benefits, including coverage expansion, agricultural monitoring, and search and rescue operations. Establishing a UAV ad hoc network requires determining the optimal path for packet transfer to reach its destination. Due to the frequent topology changes in typical UAV ad hoc networks, the selection of an efficient routing protocol is crucial for their successful deployment and management. This paper presents the various routing protocols proposed for UAV ad hoc networks. It evaluates and compares the performance of four routing protocols (OLSR, D-OLSR, ML-OLSR, and P-OLSR) in terms of packet delivery ratio (PDR), latency, energy consumption, and throughput. The analyzed scenario depicts a mission of search and rescue in which a rectangular search area has been set up and the task is completed more rapidly by using several UAVs. Furthermore, we take into account a randomized search strategy that is driven by a GM mobility model. However, the research does not take into account planned search schemes or circle search schemes. Three simulated scenarios were evaluated by altering the UAV’s scalability, mobility, and allowable space. Based on the simulation results, ML-OLSR outperforms OLSR, D-OLSR, and P-OLSR in the considered measures. In addition, it was demonstrated that OLSR performed significantly below D-OLSR and P-OLSR due to its high overhead and sluggish reaction to network topology changes.
Future research directions will consider UAV routing protocols with machine learning and deep learning solutions to modify the MPR selection algorithm and select the optimal route between UAVs. Moreover, it is possible to improve the performance of routing protocols in UAV ad hoc networks using reinforcement learning (RL) and Q-Learning, which can be conducted first using the
ns-gym framework and then validated in real environments with real drones. An RL and Q-Learning system will offer real-time modification as it reacts to the environment in which the protocols are established and implemented. Meanwhile,
ns3-
gym integrates both Open AI Gym and ns-3 to encourage the usage of RL in networking research [
40].
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}