


A Synthesis of Algorithms Determining a Safe Trajectory in a Group of Autonomous Vehicles Using a Sequential Game and Neural Network


Abstract
1. Introduction
1.1. The State of Knowledge of Autonomous Vehicles Route Planning
1.2. The Thesis and Objectives of This Paper
1.3. Paper Contents
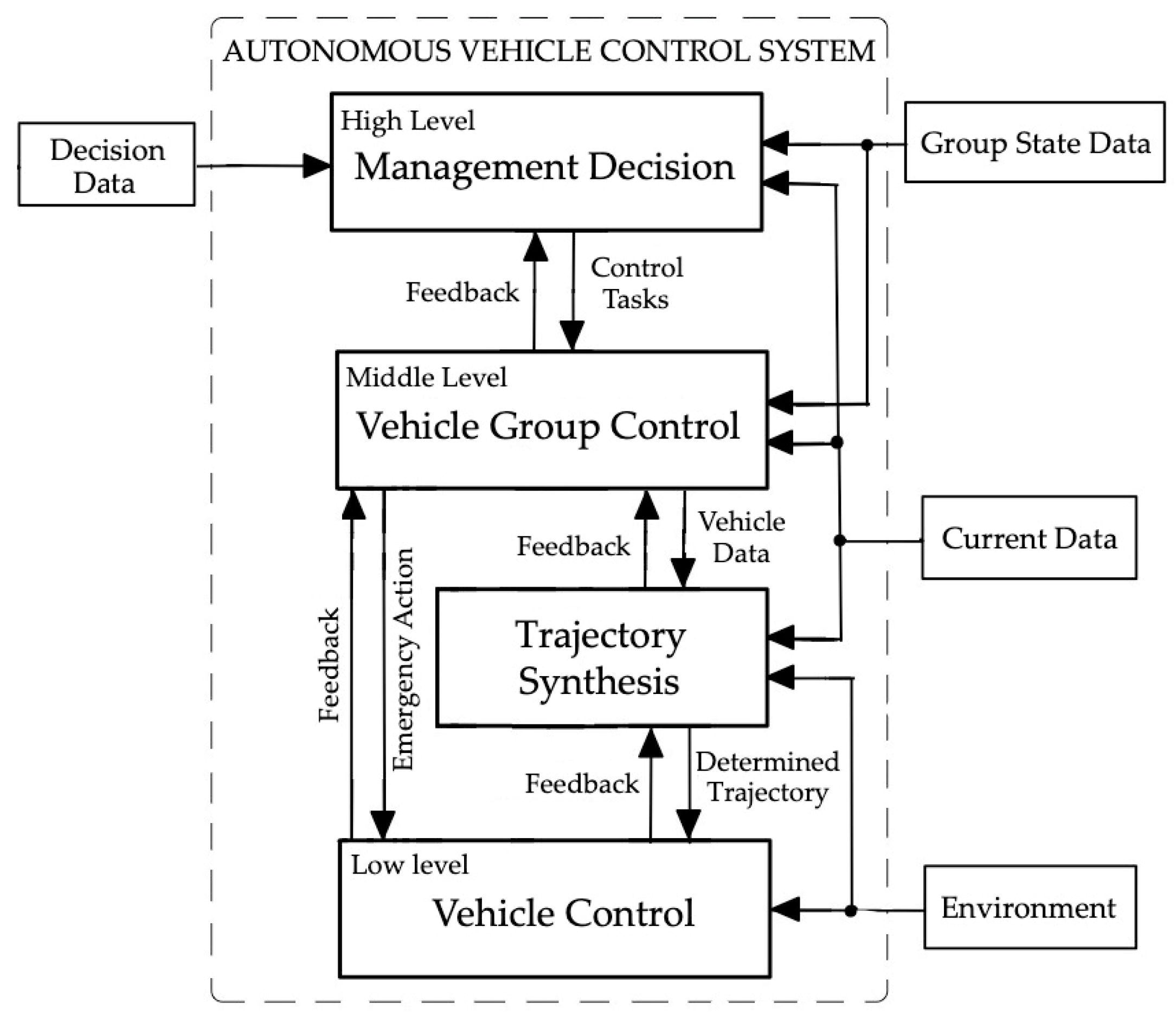
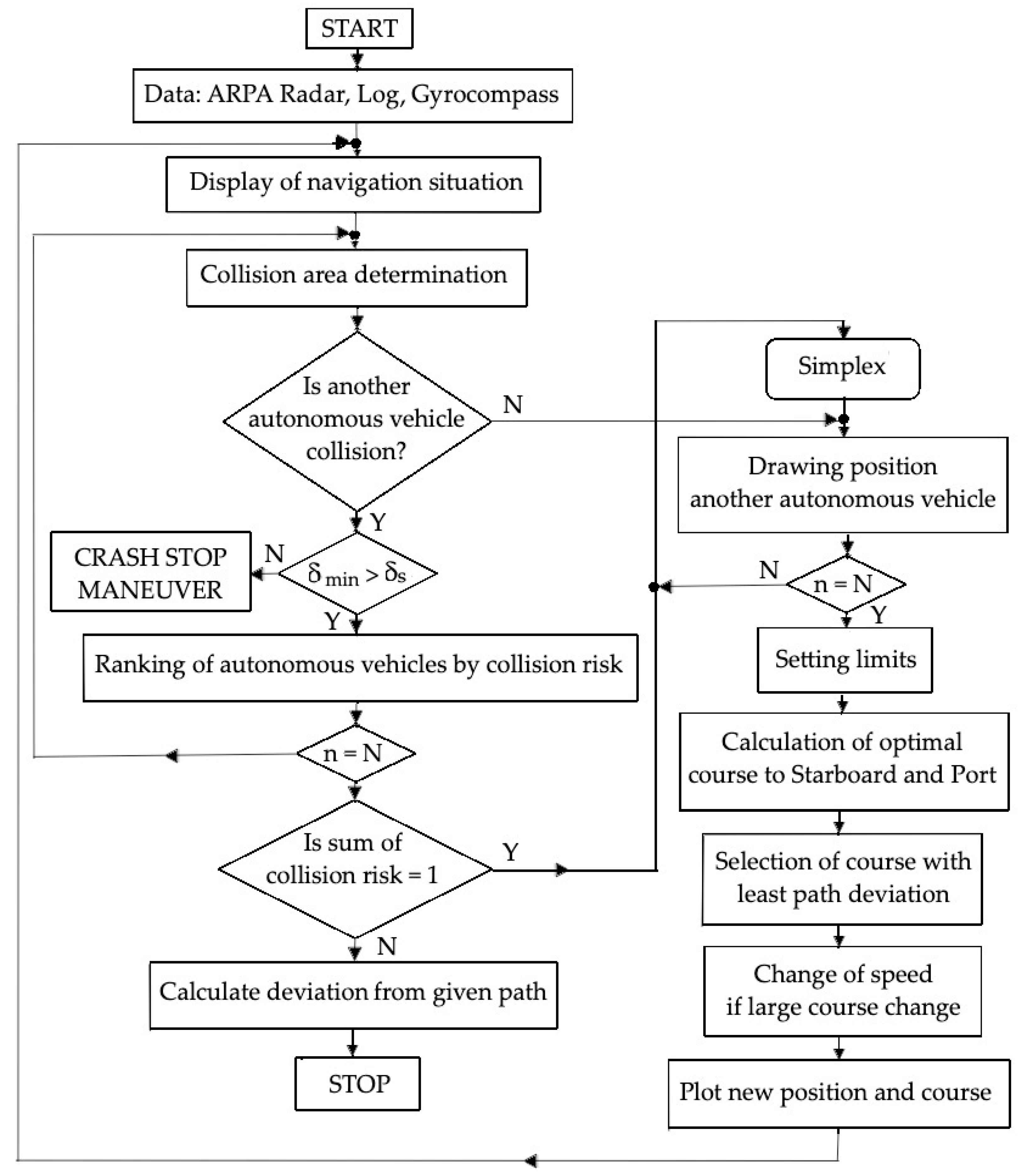
2. Safe Trajectory Determining Algorithms
- Kinematic trajectory, taking into account the dynamics of the vehicle in the form of advance time of the course or speed change manoeuvre;
- Dynamic trajectory, taking into account vehicle dynamics in the form of first-order differential equations of process state;
- Dynamic trajectory, taking into account possible changes in the course and speed of another autonomous vehicle.
2.1. Kinematic Optimization KO Algorithm
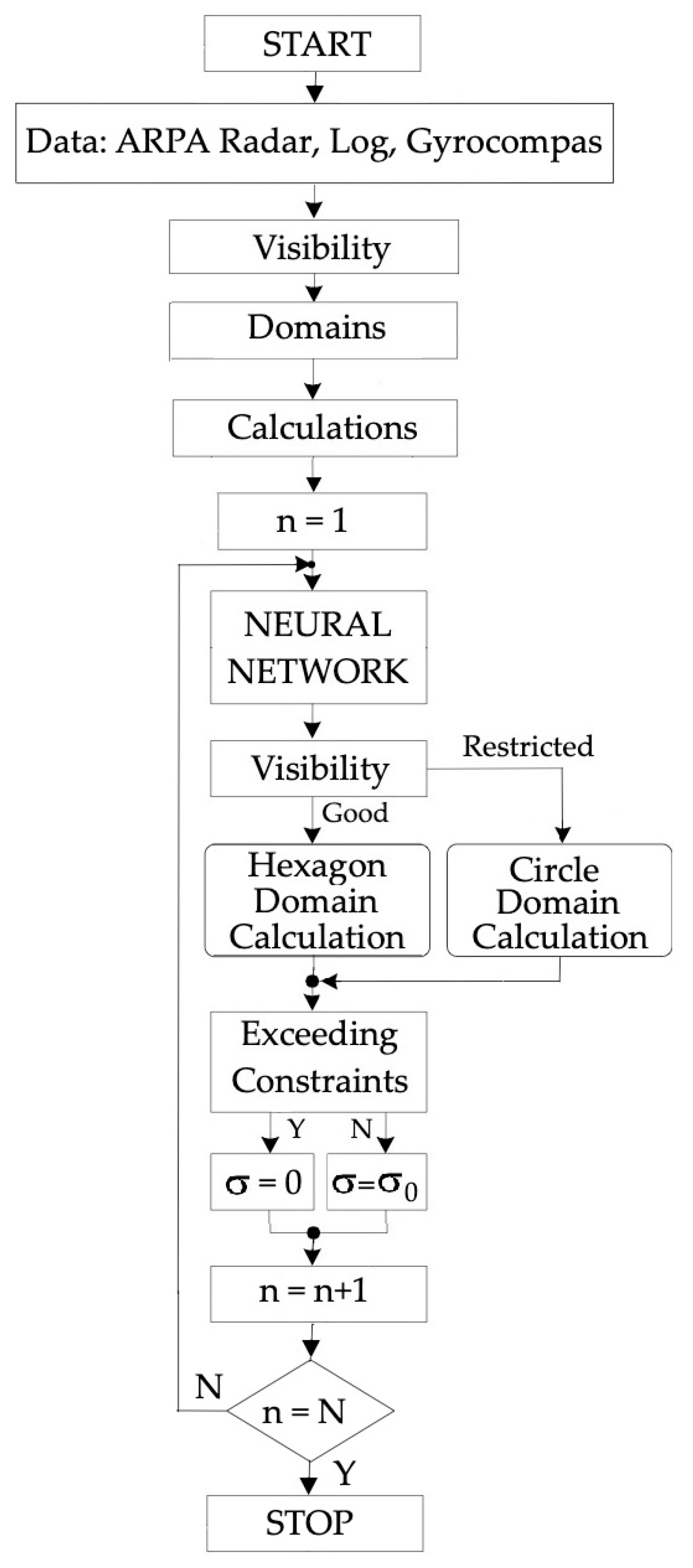
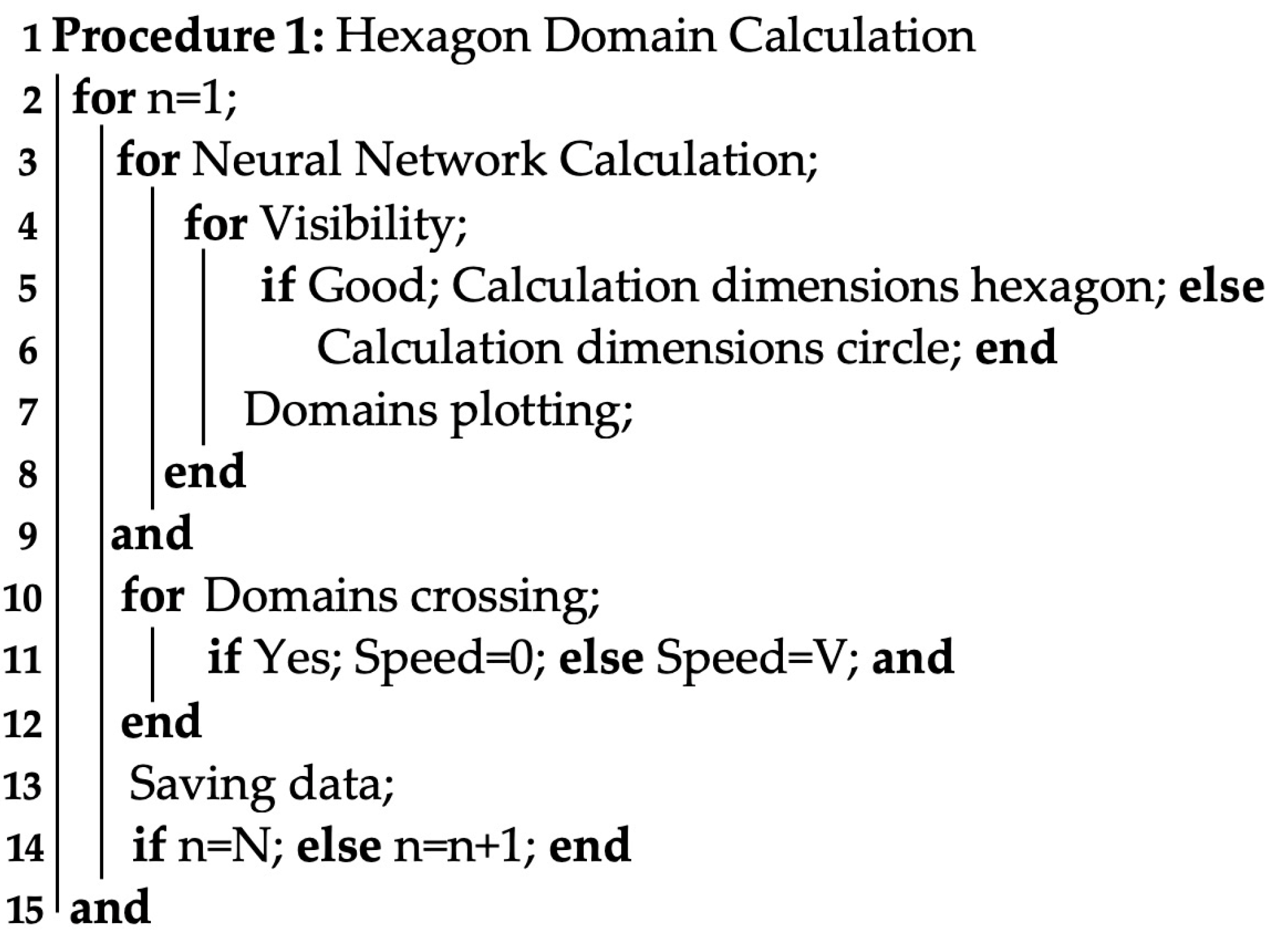
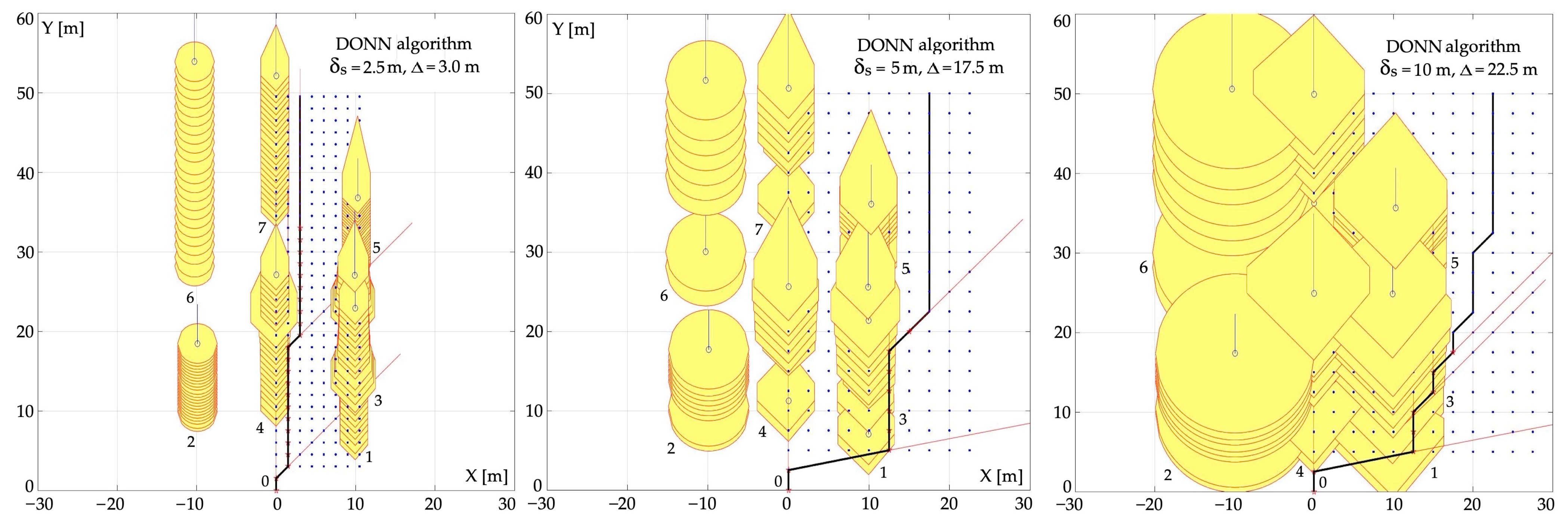
2.2. Dynamic Optimization with a Neural Network DONN Algorithm
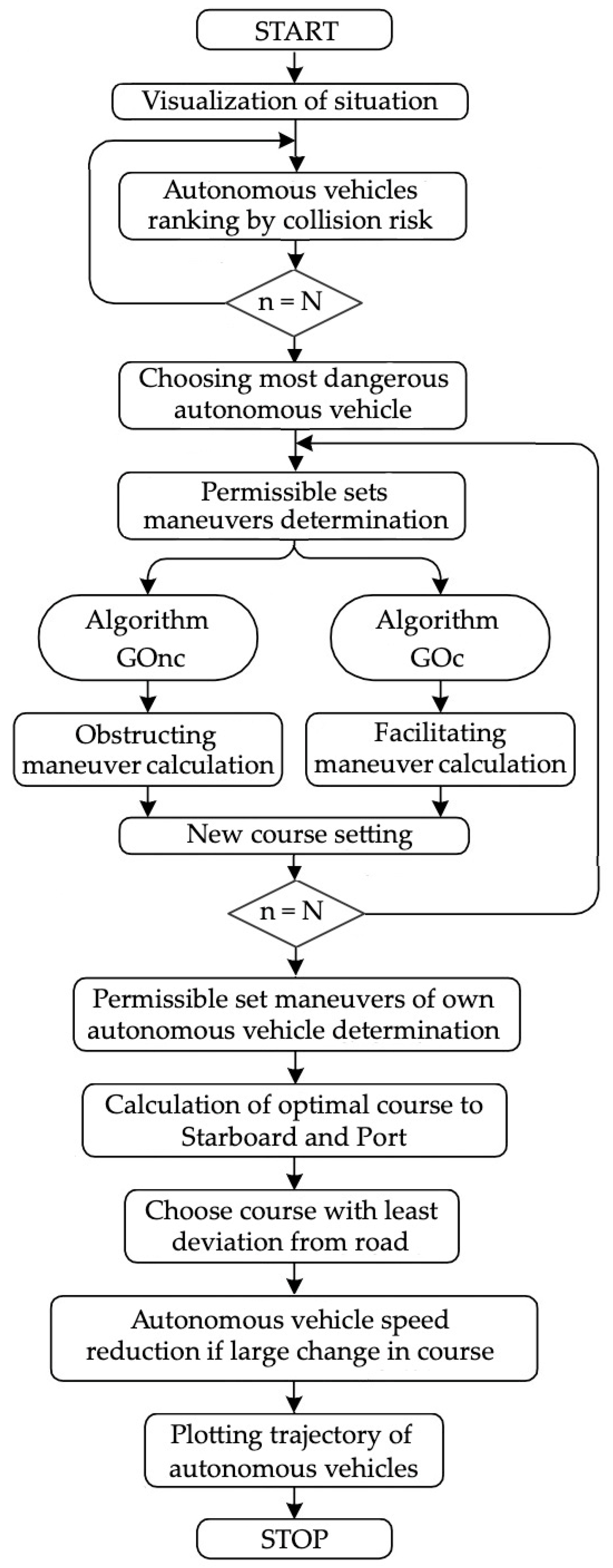
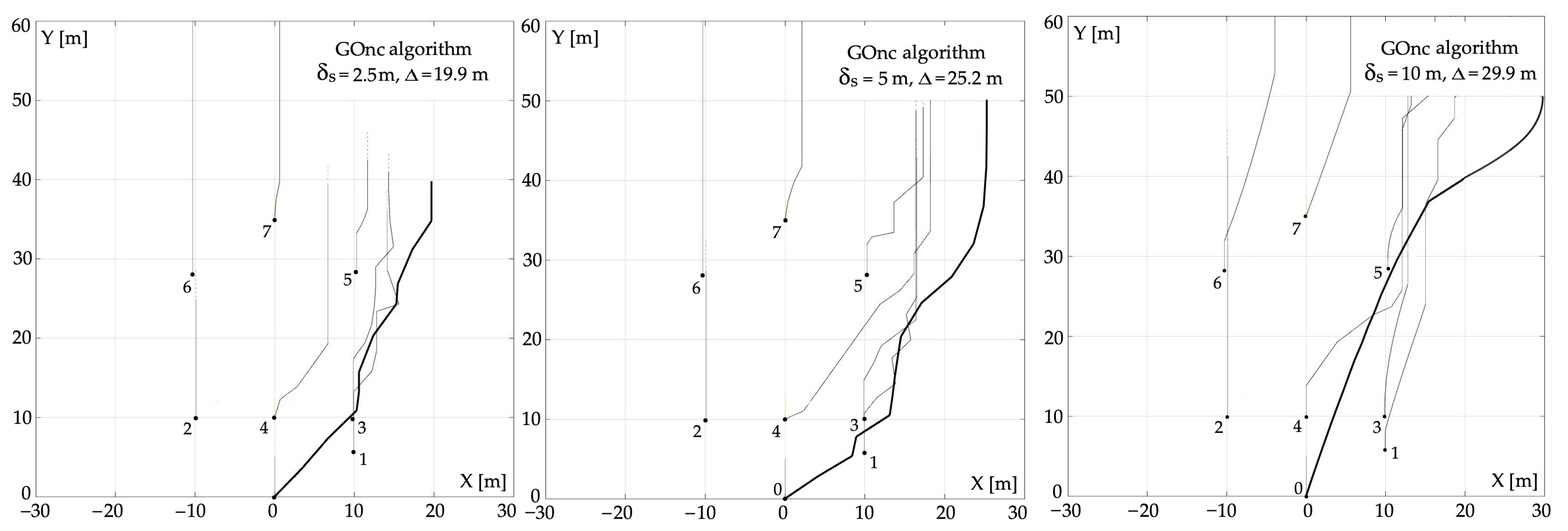
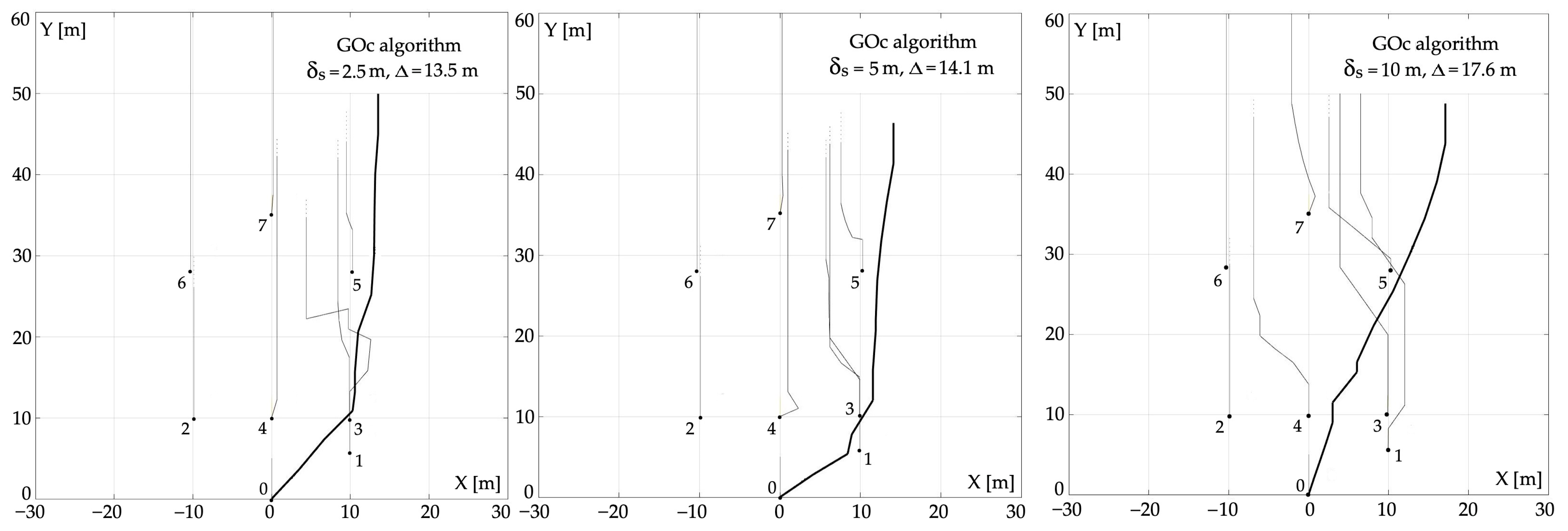
2.3. Game Optimization GO Algorithm
3. Computer Simulation
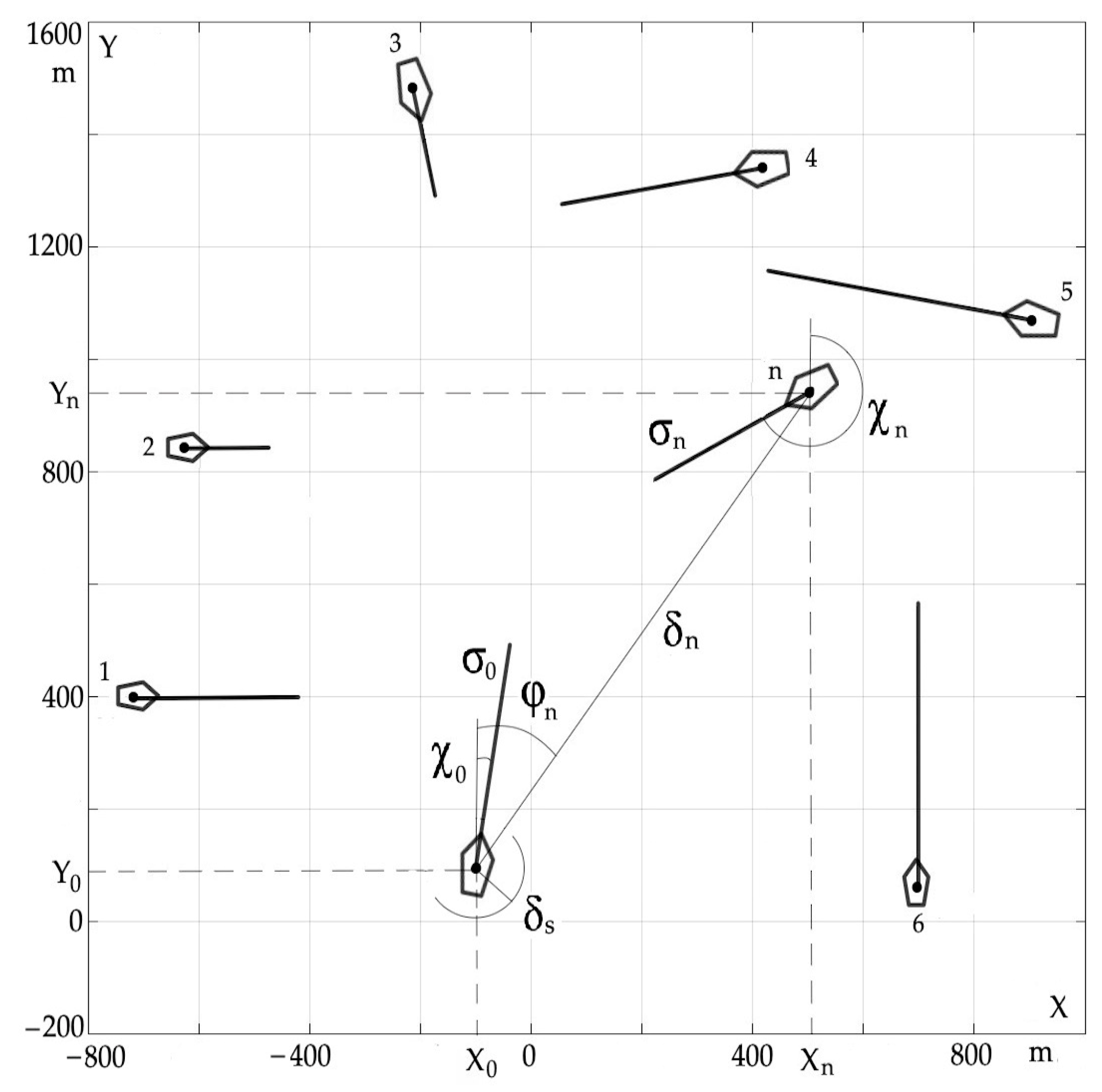
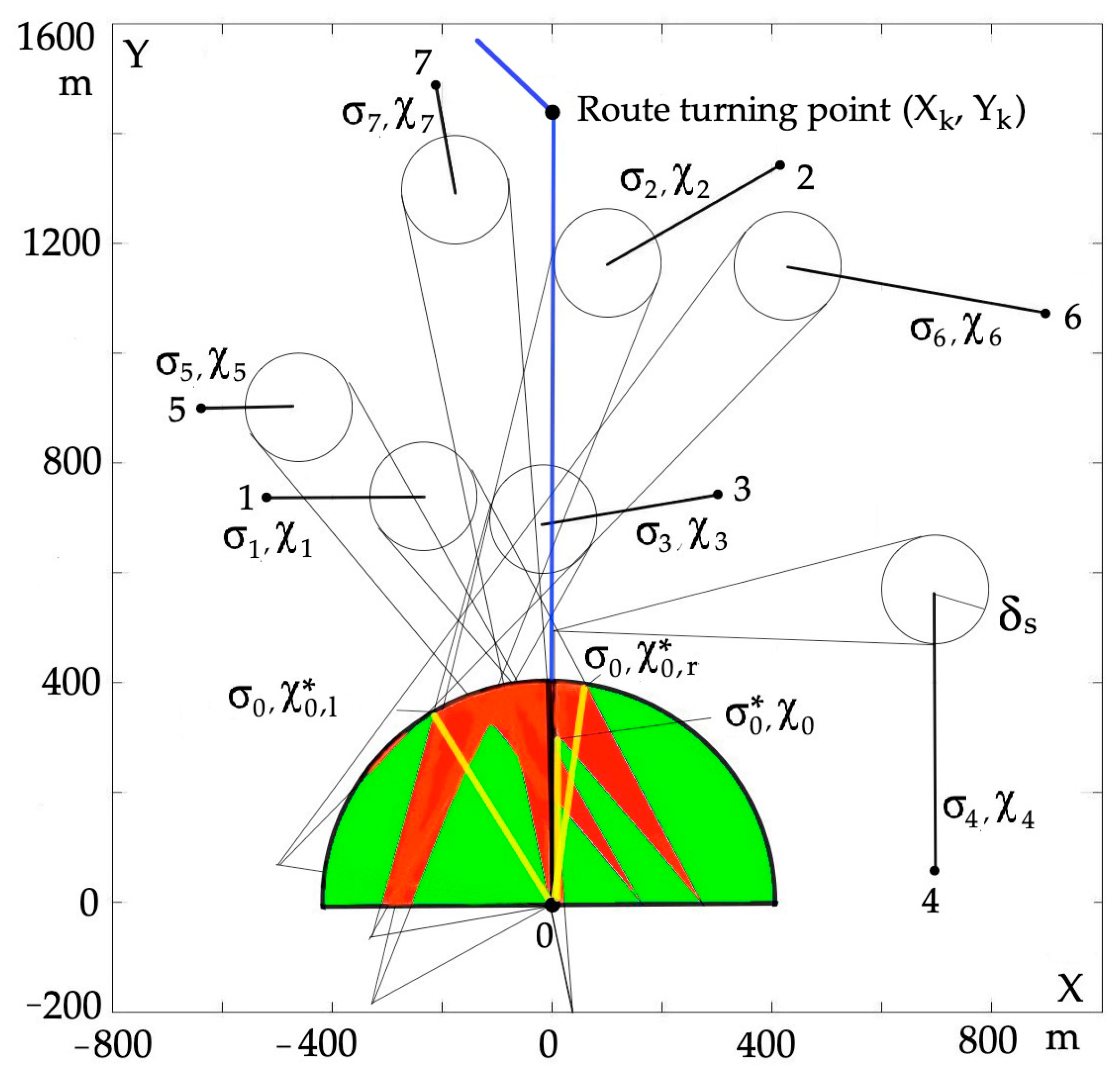
3.1. Multidirectional Traffic Scenario
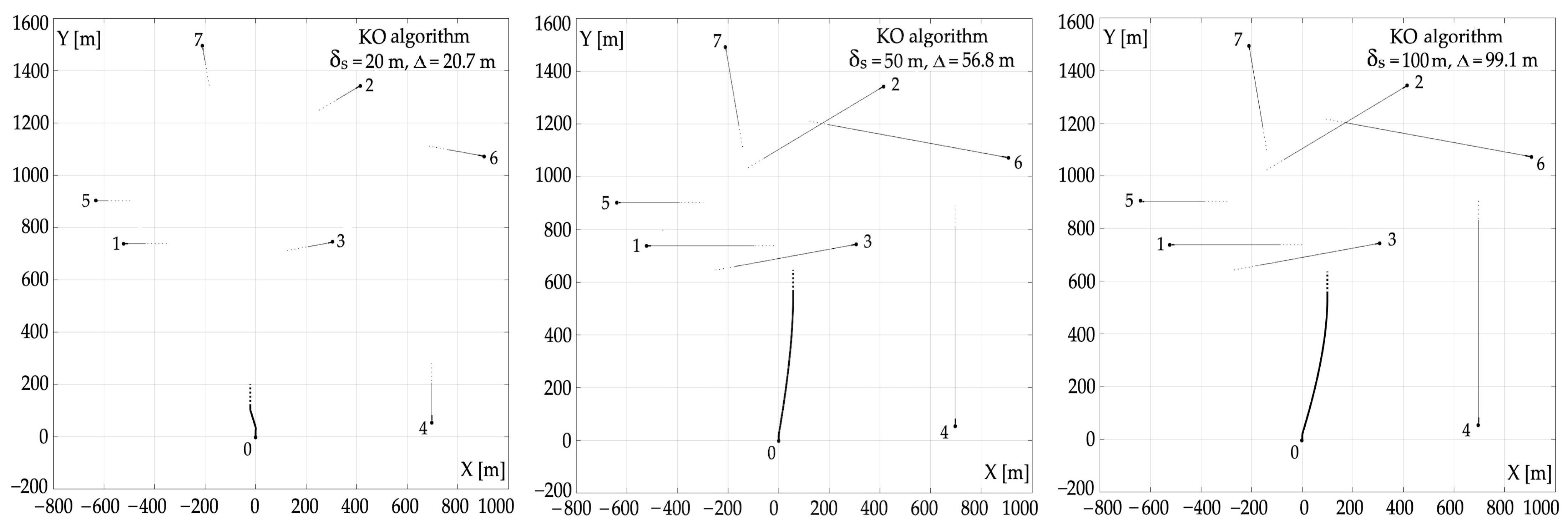
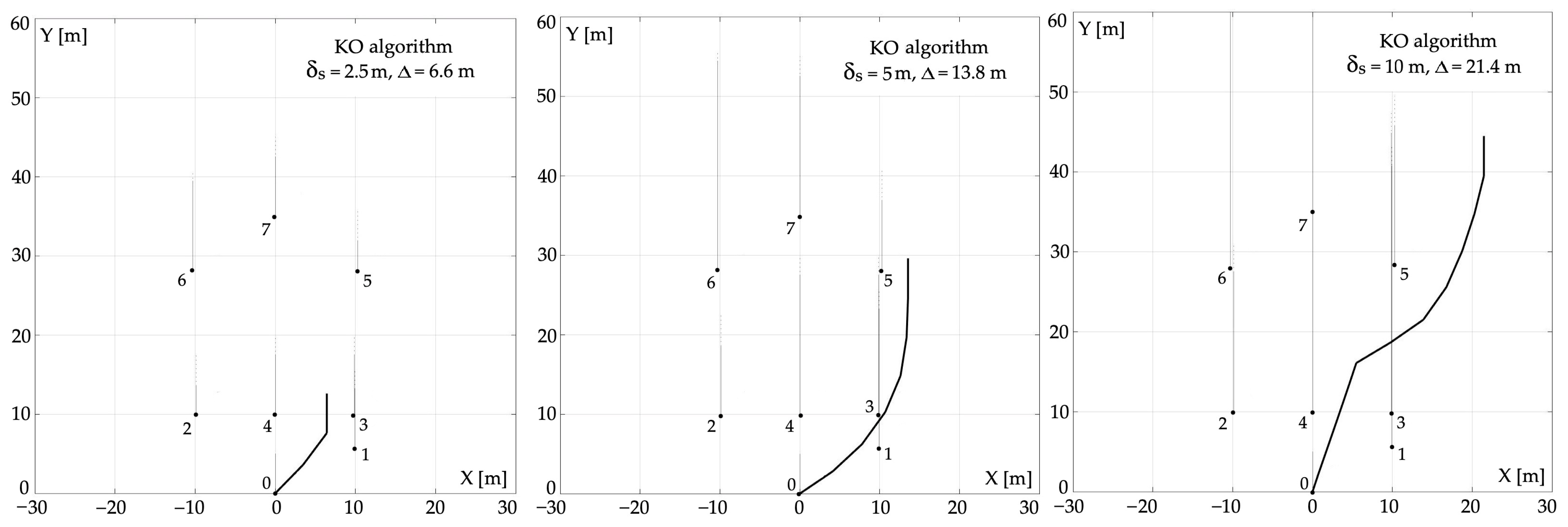
3.1.1. Kinematic Optimization Trajectory
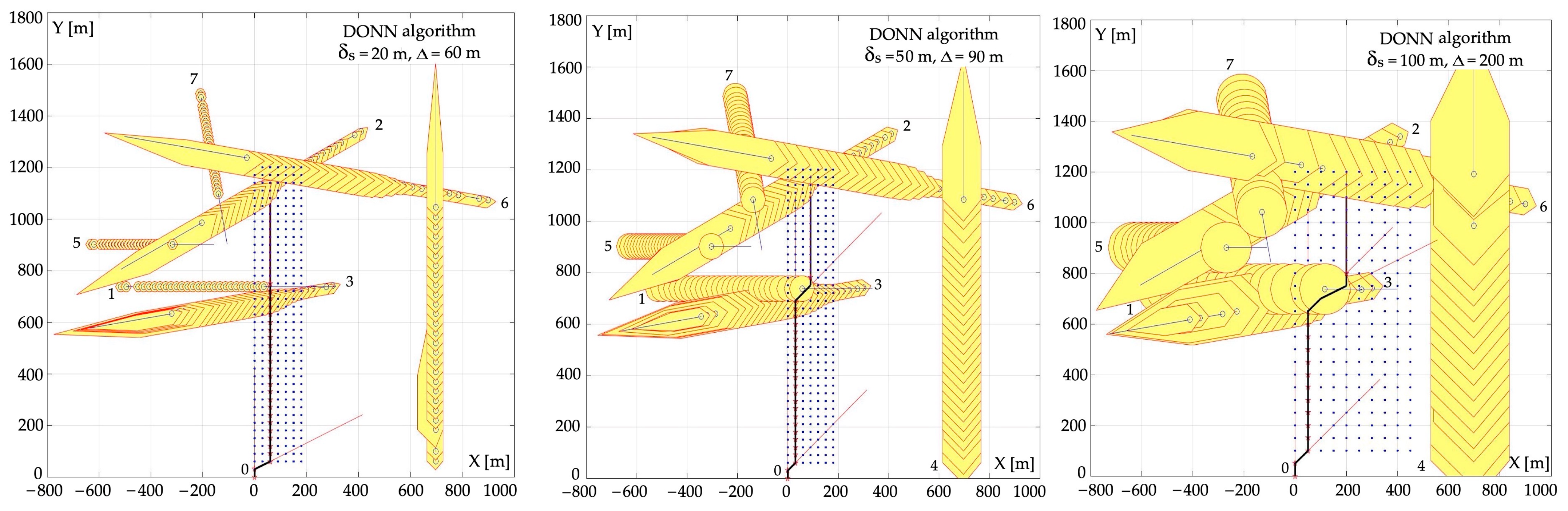
3.1.2. Dynamic Optimization Trajectory
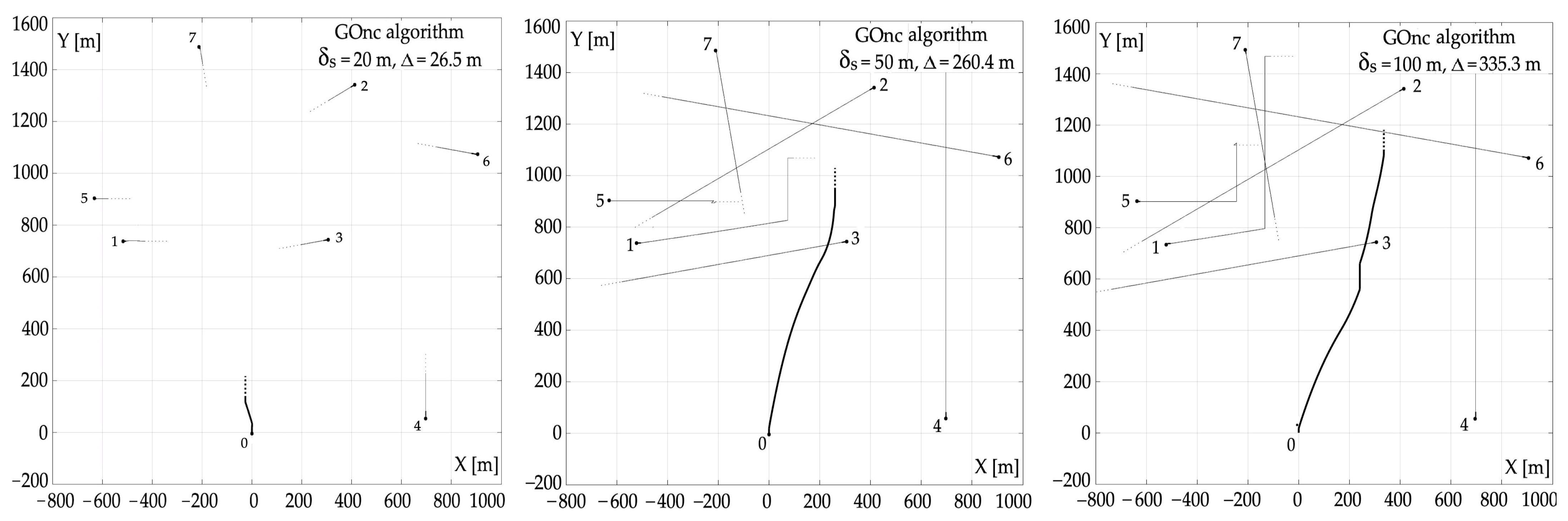
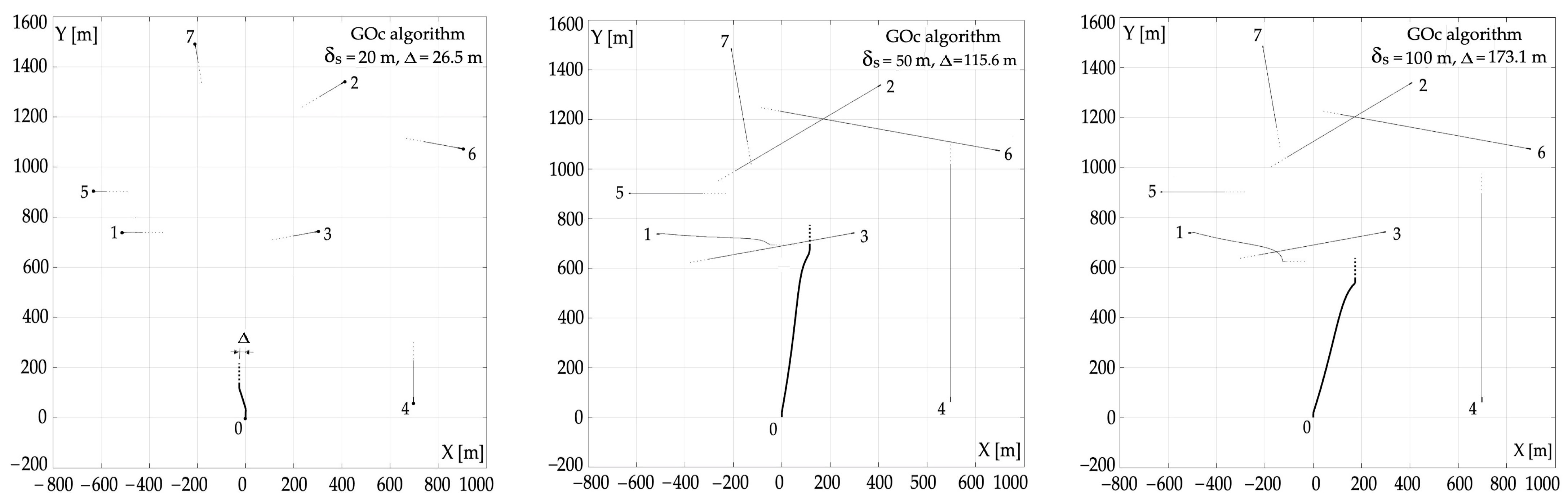
3.1.3. Game Optimization Trajectory
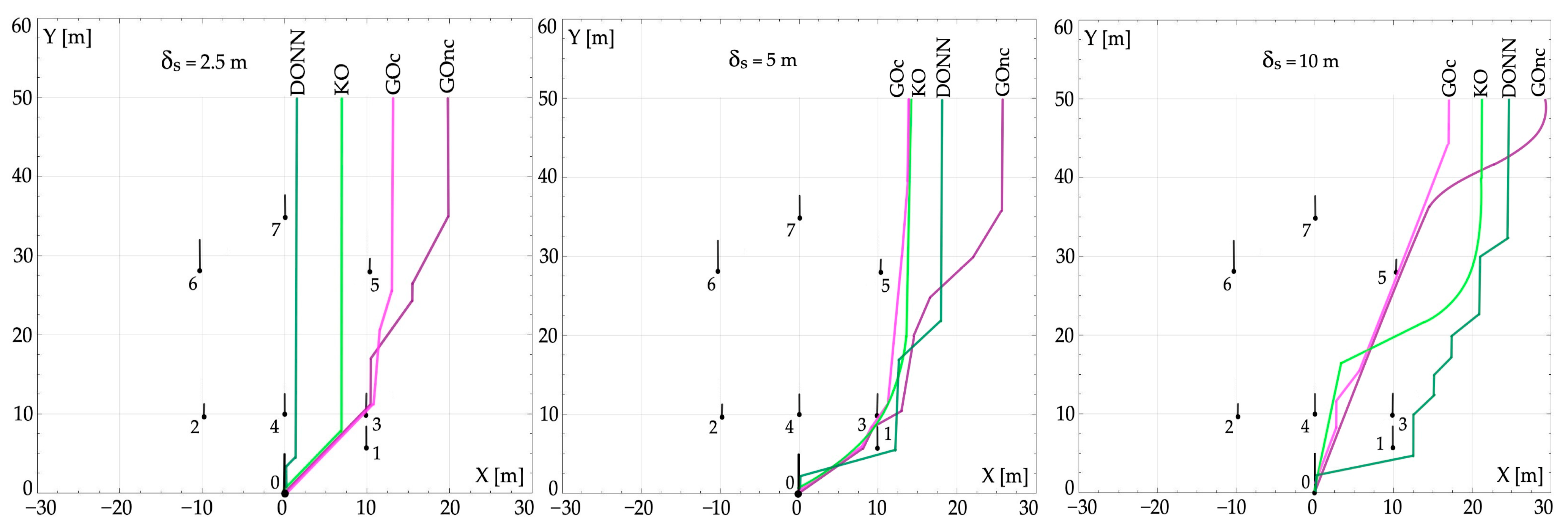
3.2. One-Way Traffic Scenario
3.2.1. Kinematic Optimization Trajectory
3.2.2. Dynamic Optimization Trajectory
3.2.3. Game Optimization Trajectory
4. Discussion
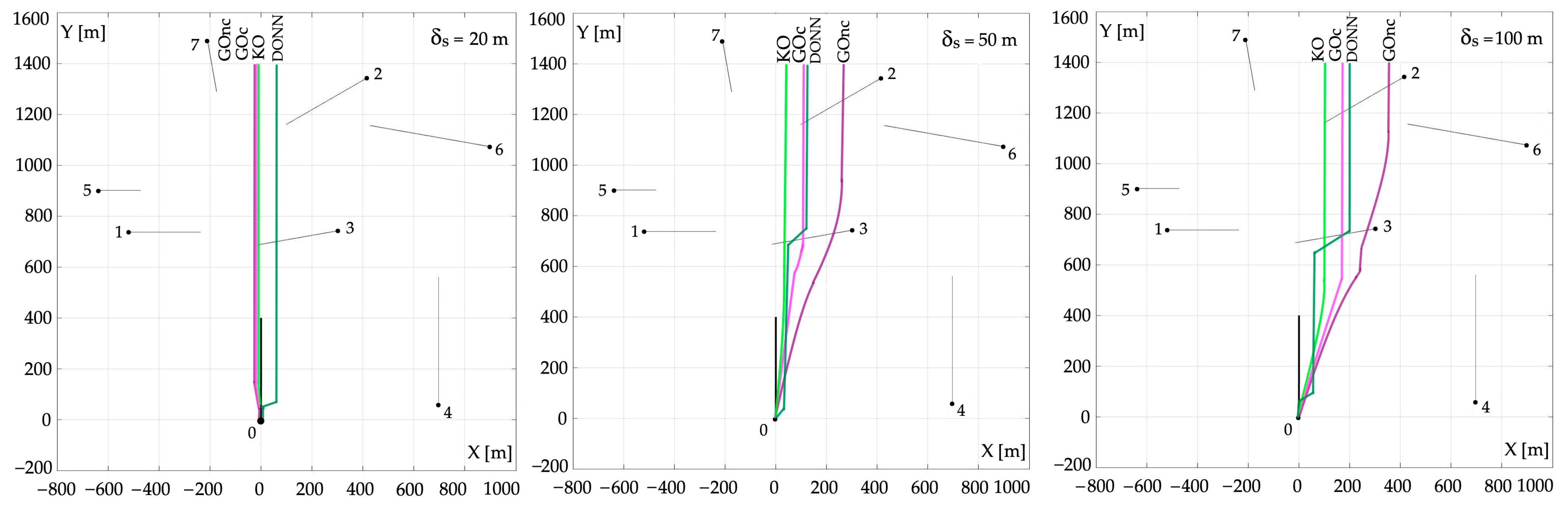
4.1. Trajectory Comparison in Multidirectional Traffic
4.2. Trajectory Comparison in One-Way Traffic
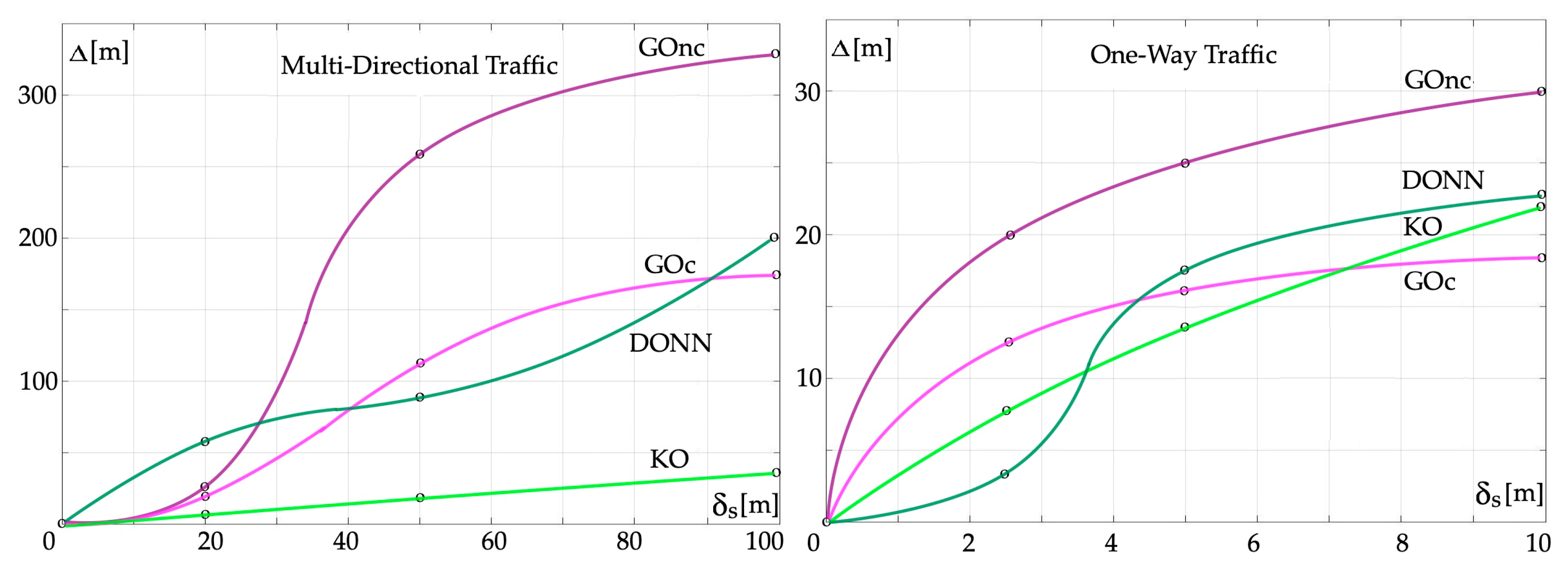
4.3. Comparison of the Final Trajectory Deviation
- The final safe trajectory deviation is much greater for the DO and GO algorithms compared to the KO algorithm, but this comes at the expense of increasing the traffic safety of the autonomous vehicle to take into account the uncertainty of the environment and the non-cooperative behavior of other autonomous vehicles;
- In the case of the DO algorithm, the deviation increases 18 times;
- In the case of the GOc algorithm, the deviation increases only five times;
- In the case of the GOnc algorithm, the deviation increases as much as 26 times.
5. Conclusions
- The synthesis of algorithms to determine safe trajectory in the group of autonomous vehicles using sequential games and dynamic optimization enabled the traffic condition to be taken into account;
- Using the variable domains of an autonomous vehicle generated by a previously trained neural network allowed the limited perception of the control algorithm to be taken into account.
- Synthesis of an integrated dynamical-game control algorithm;
- Evaluation of control quality sensitivity to information inaccuracy and disturbances level.
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Practical search techniques in path planning for autonomous driving. In Proceedings of the First International Symposium on Search Techniques in Artificial Intelligence and Robotics (STAIR-08), Chicago, IL, USA, 1–17 June 2008. [Google Scholar]
- Kuwata, Y.; Teo, J.; Fiore, G.; Karaman, S.; Frazzoli, E.; How, J.P. Real-time motion planning with applications to autonomous urban driving. IEEE Trans. Control Syst. Technol. 2009, 17, 1105–1118. [Google Scholar] [CrossRef]
- Luo, L.; Liu, H.; Li, P.; Wang, H. Model predictive control for adaptive cruise control with multi-objectives: Comfort, fuel-economy, safety and car-following. J. Zhejiang Univ. Sci. A 2010, 11, 191–201. [Google Scholar] [CrossRef]
- Contet, J.M.; Gechter, F.; Gruer, P.; Koukam, A. Reactive multi-agent approach to local platoon control: Stability analysis and experimentations. Int. J. Intell. Syst. Technol. Appl. 2011, 10, 231–249. [Google Scholar] [CrossRef]
- Khodayari, A.; Ghaffari, A.; Nouri, M.; Salehinia, S.; Alimardani, F. Model predictive control system design for car-following behavior in real traffic flow. In Proceedings of the IEEE International Conference on Vehicular Electronics and Safety (ICVES), Istanbul, Turkey, 24–27 July 2012; pp. 87–92. [Google Scholar] [CrossRef]
- Talebpour, A.; Mahmassani, H.S.; Hamdar, S.H. Modeling lane-changing behavior in a connected environment: A game theory approach. Transp. Res. Procedia 2015, 7, 420–440. [Google Scholar] [CrossRef]
- González, D.; Pérez, J.; Milanés, V.; Nashashibi, F. A review of motion planning techniques for automated vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1135–1145. [Google Scholar] [CrossRef]
- Bast, H.; Delling, D.; Goldberg, A.; Muller-Hannemann, M.; Pajor, T.; Sanders, P.; Wagner, D.; Werneck, R.F. Route planning in transportation networks. In Algorithm Engineering; Kliemann, L., Sanders, P., Eds.; Springer: Berlin, Germany, 2016; pp. 19–80. [Google Scholar] [CrossRef]
- Gong, S.; Shen, J.; Du, L. Constrained optimization and distributed computation based car following control of a connected and autonomous vehicle platoon. Transp. Res. Part B Methodol. 2016, 94, 314–334. [Google Scholar] [CrossRef]
- Marin-Plaza, P.; Hussein, A.; Martin, D.; Escalera, A. Global and local path planning study in a ros-based research platform for autonomous vehicles. J. Adv. Transp. 2018, 2284, 012015. [Google Scholar] [CrossRef]
- Petrillo, A.; Salvi, A.; Santini, S.; Valente, A.S. Adaptive multi-agents synchronization for collaborative driving of autonomous vehicles with multiple communication delays. Transp. Res. Part C Emerg. Technol. 2018, 86, 372–392. [Google Scholar] [CrossRef]
- Huang, Z.; Chu, D.; Wu, C.; He, Y. Path planning and cooperative control for automated vehicle platoon using hybrid automata. IEEE Trans. Intell. Transp. Syst. 2018, 20, 959–974. [Google Scholar] [CrossRef]
- Huang, Y.; Ding, H.; Zhang, Y.; Wang, H.; Cao, D.; Xu, N.; Hu, C. A motion planning and tracking framework for autonomous vehicles based on artificial potential field elaborated resistance network approach. IEEE Trans. Ind. Electron. 2019, 67, 1376–1386. [Google Scholar] [CrossRef]
- Li, Y.; Vorobeychik, Y. Path planning games. Multiagent Syst. arXiv 2019, arXiv:1910.13880. [Google Scholar]
- Chen, J.; Zhang, R.; Han, W.; Jiang, W.; Hu, J.; Lu, X.; Liu, X.; Zhao, P. Path Planning for Autonomous Vehicle Based on a Two-Layered Planning Model in Complex Environment. J. Adv. Transp. 2020, 2020, 6649867. [Google Scholar] [CrossRef]
- Said, A.; Talj, R.; Francis, C.; Shraim, H. Local trajectory planning for autonomous vehicle with static and dynamic obstacles avoidance. In Proceedings of the 24th IEEE International Conference on Intelligent Transportation Systems (ITSC 2021), Indianapolis, IN, USA, 19–22 September 2021; pp. 410–416. [Google Scholar] [CrossRef]
- Braud, T.; Ivanchev, J.; Deboeser, C.; Knoll, A.; Eckhoff, D.; Sangiovanni-Vincentelli, A. AVDM: A hierarchical command-and-control system architecture for cooperative autonomous vehicles in highways scenario using microscopic simulations. Auton. Agents Multi-Agent Syst. 2021, 35, 16. [Google Scholar] [CrossRef]
- Dinh, H.T.; Romano, D.; Menani, P.A.; Vaquero, V.; De Clercq, Q.; Venkatadri, R.; Quintana, N.; Tornes, M. Real-time safety assessment of trajectories for autonomous driving. arXiv 2021. [Google Scholar] [CrossRef]
- Xu, W.; Sainct, R.; Gruyer, D.; Orfila, O. Safe Vehicle Trajectory Planning in an Autonomous Decision Support Framework for Emergency Situations. Appl. Sci. 2021, 11, 6373. [Google Scholar] [CrossRef]
- Abdallaoui, S.; Aglzim, E.H.; Chaibet, A.; Kribèche, A. Thorough Review Analysis of Safe Control of Autonomous Vehicles: Path Planning and Navigation Techniques. Energies 2022, 15, 1358. [Google Scholar] [CrossRef]
- Bautista-Camino, P.; Barranco-Gutierrez, A.I.; Cervantes, I.; Rodriguez-Licea, M.; Prado-Olivarez, J.; Perez-Pinal, F.J. Local Path Planning for Autonomous Vehicles Based on the Natural Behavior of the Biological Action—Perception Motion. Energies 2022, 15, 1769. [Google Scholar] [CrossRef]
- Batkovic, I. Enabling Safe Autonomous Driving in Uncertain Environments. Ph.D. Thesis, Department of Electrical Engineering Chalmers University of Technology, Gothenburg, Sweden, 2022. [Google Scholar]
- Kim, D.; Kim, G.; Kim, H.; Huh, K. A Hierarchical Motion Planning Framework for Autonomous Driving in Structured Highway Environments. IEEE Access 2022, 10, 20102–20117. [Google Scholar] [CrossRef]
- Lisowski, J. Game Control Methods Comparison when Avoiding Collisions with Multiple Objects Using Radar Remote Sensing. Remote Sens. 2020, 12, 1573. [Google Scholar] [CrossRef]
- Lisowski, J. Synthesis of a Path-Planning Algorithm for Autonomous Robots Moving in a Game Environment during Collision Avoidance. Electronics 2021, 10, 675. [Google Scholar] [CrossRef]
- Nise, N.S. Control Systems Engineering, 8th ed.; California State Polytecnic University: SAN Luis Obispo, CA, USA; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2019; ISBN 978-1-119-47422-7. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Process Model | Control Theory Method | Algorithm |
|---|---|---|
| Kinematic | Linear Programming | Kinematic Optimization KO |
| Dynamic | Dynamic Programming Neural Network | Dynamic Optimization with Neural Network DONN |
| Game | Triple Linear Programming | Game Optimization GO |
| Autonomous Vehicle n | Speed σn (m/s) | Course χn (°) | Position Component Xn (m) | Position Component Yn (m) |
|---|---|---|---|---|
| 0 | 20 | 0 | 0 | 0 |
| 1 | 14 | 90 | −520 | 760 |
| 2 | 18 | 240 | 410 | 1360 |
| 3 | 16 | 260 | 310 | 760 |
| 4 | 25 | 0 | 650 | 60 |
| 5 | 8 | 90 | −640 | 710 |
| 6 | 24 | 280 | 910 | 1060 |
| 7 | 10 | 170 | −210 | 1500 |
| Autonomous Vehicle n | Speed σn (m/s) | Course χn (°) | Position Component Xn (m) | Position Component Yn (m) |
|---|---|---|---|---|
| 0 | 0 | 0 | 10.1 | 6.9 |
| 1 | 10 | 0 | −9.9 | 7.6 |
| 2 | 5 | 0 | 10.0 | 10.0 |
| 3 | 10 | 0 | 9.8 | 10.0 |
| 4 | 10 | 0 | 0 | 10.0 |
| 5 | 15 | 0 | 10.2 | 28.2 |
| 6 | 15 | 0 | −10.2 | 28.1 |
| 7 | 10 | 0 | 0 | 36.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lisowski, J. A Synthesis of Algorithms Determining a Safe Trajectory in a Group of Autonomous Vehicles Using a Sequential Game and Neural Network. Electronics 2023, 12, 1236. https://doi.org/10.3390/electronics12051236
Lisowski J. A Synthesis of Algorithms Determining a Safe Trajectory in a Group of Autonomous Vehicles Using a Sequential Game and Neural Network. Electronics. 2023; 12(5):1236. https://doi.org/10.3390/electronics12051236
Chicago/Turabian StyleLisowski, Józef. 2023. "A Synthesis of Algorithms Determining a Safe Trajectory in a Group of Autonomous Vehicles Using a Sequential Game and Neural Network" Electronics 12, no. 5: 1236. https://doi.org/10.3390/electronics12051236
APA StyleLisowski, J. (2023). A Synthesis of Algorithms Determining a Safe Trajectory in a Group of Autonomous Vehicles Using a Sequential Game and Neural Network. Electronics, 12(5), 1236. https://doi.org/10.3390/electronics12051236