Electric vehicles have a long history of development and will continue to do so. Based on a disposable battery, they were first manufactured around 1830 [
1]. They were improved in 1881 with the first electric vehicle (EV) based on a rechargeable battery. In addition, the first EV operated via a small electric motor was made in 1898 [
1]. In fact, electric vehicles had more drawbacks than internal combustion engine (ICE) vehicles, such as the inability to reach high speeds. In addition, the capacity of the battery was very small compared to an ICE’s tanks [
2]. Due to gasoline and oil shortages, the electric vehicle industry began again in the twenty-first century [
3]. Furthermore, the use of EVs is increasing in order to help the environment by reducing carbon pollution. As a result, consumers returned to using EVs based on improvements to keep up operations compared to ICE cars [
1,
2,
3].
EVs are classified into three main types based on their power supplies [
4]. The types are battery electric vehicles (BEVs), hybrid electric vehicles (HEVs), and plug-in hybrid electric vehicles (P-HEVs). Battery-based chargers and electric motors are examples of BEVs. However, the HEV has the advantage of combining a traction motor with an ICE to push and move the vehicle. In HEVs, a system of regenerative braking is used to recharge the disposable battery. The P-HEV is similar to the HEV, but it has the difference that the batteries in the P-HEV are rechargeable through an external electric source. The speeds of EVs are very slow compared with ICE vehicles. As a result, researchers were forced to merge EVs with ICE vehicles in order to facilitate operation with a different source. However, control of the resultant HEV type became harder. Therefore, HEVs are a remarkable research field that can present a solution for decreasing oil and gas consumption, reducing pollution, and increasing the speed of EVs [
1,
2,
3,
4]. Recently, the research area of HEV control has grown rapidly.
The HEV is an interesting research point for many scientific researchers. The PID controller is commonly used for many applications, such as HEVs. Reference [
5], the PID is applied to the DC motor of HEVs to control the speed. Furthermore, the HEV was studied with a DC motor and mechanical engine to control the speed using a PID controller [
6]. The objectives of the HEV [
6] are to maximize efficiency and reduce carbon. A control system for the speed of an HEV-based DC motor using a microcontroller card as the electronic control unit of the vehicle is demonstrated in [
7]. The control design was developed using a PID controller and realized based on a prototype that integrated different types of sensors [
7]. The optimal sharing of consumed energy between an ICE and the battery source that feeds the motor was studied [
8]. Additionally, the two sources are recommended to operate in their efficient regions. Reference [
8], the energy management approach is improved based on a neural network and fuzzy logic strategy for HEVs. In addition, fuzzy logic techniques are proposed as a control strategy for HEVs [
9]. In addition, the genetic algorithm (GA) is utilized to obtain the optimal minimum fuel consumption and decrease the level of emissions [
9]. The authors of [
10] introduced a comparative study based on different performance tests to show the effectiveness of applying different control techniques such as PID, H∞, and fuzzy controllers for nonlinear HEVs. Sliding mode control is applied to achieve the required torque set point of the clutch transmission [
11]. Moreover, the actual torque is estimated based on the PI observer in [
11]. Particle swarm optimization is used to find the optimal parameters of a fractional order PID controller to track the position of the DC motor clutch in [
12]. The FO-PI was introduced by the authors of [
13] to achieve better control performance at lower speeds with high torque per ampere as a motor output, where it was experimentally proven to be a better indirect field-oriented control method for induction motors. The research in [
14] presents several economic variables of hybrid power train systems to demonstrate the effectiveness of MPC-based online energy management. The article [
15] shows a two-level MPC for HEVs, where it has been used to gain the finest control strategy concerning the energy consumption method. Furthermore, the simulation results revealed savings of up to 39% when compared to commercial solutions [
16]. A study of the series type of HEVs is discussed based on the development of energy management by an MPC in [
17]. The article [
18] introduced different control techniques to maintain the required motor speed using an electronic throttle control system [
18]. The damping speed oscillations represented an important issue for HEVs, as discussed in [
19]. As a result, the methodology of the fuzzy-PID controller is adopted to solve this problem [
19]. Batteries are a very important component for HEVs, whether pure electric or hybrid types, as they are an essential and important source of power for HEVs. Many studies concerned with improving the performance of batteries have been carried out, such as improving the charging rate of these batteries or increasing the capacity of the batteries to give the vehicles a longer supply period [
20,
21,
22]. A detailed review study on the most important types of batteries and the ones most widely applied in HEVs, which are lithium-ion batteries, was discussed in [
20]. Another review study on the chemistry of batteries and the analysis of the chemistry of cells and materials used in batteries is given in [
21]. One of the most important research topics is the recycling of batteries and its impact on sustainable development, as presented in [
22].
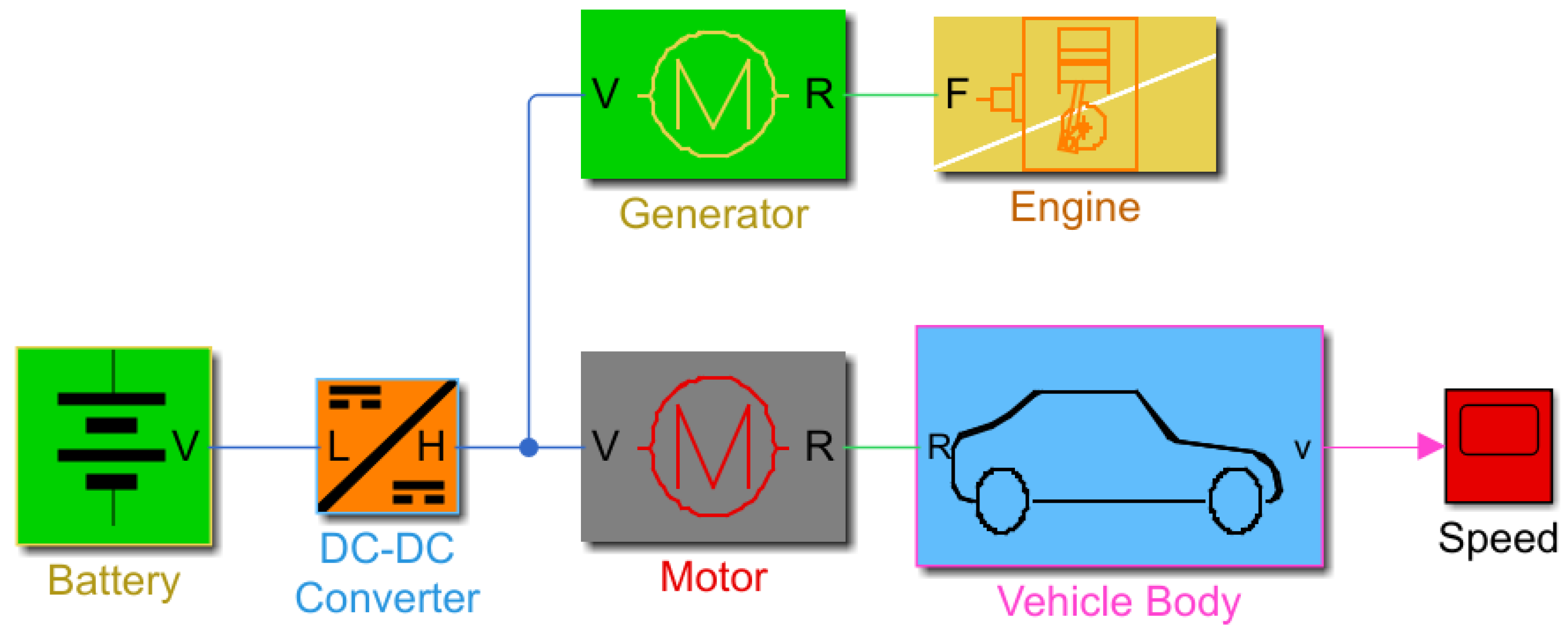
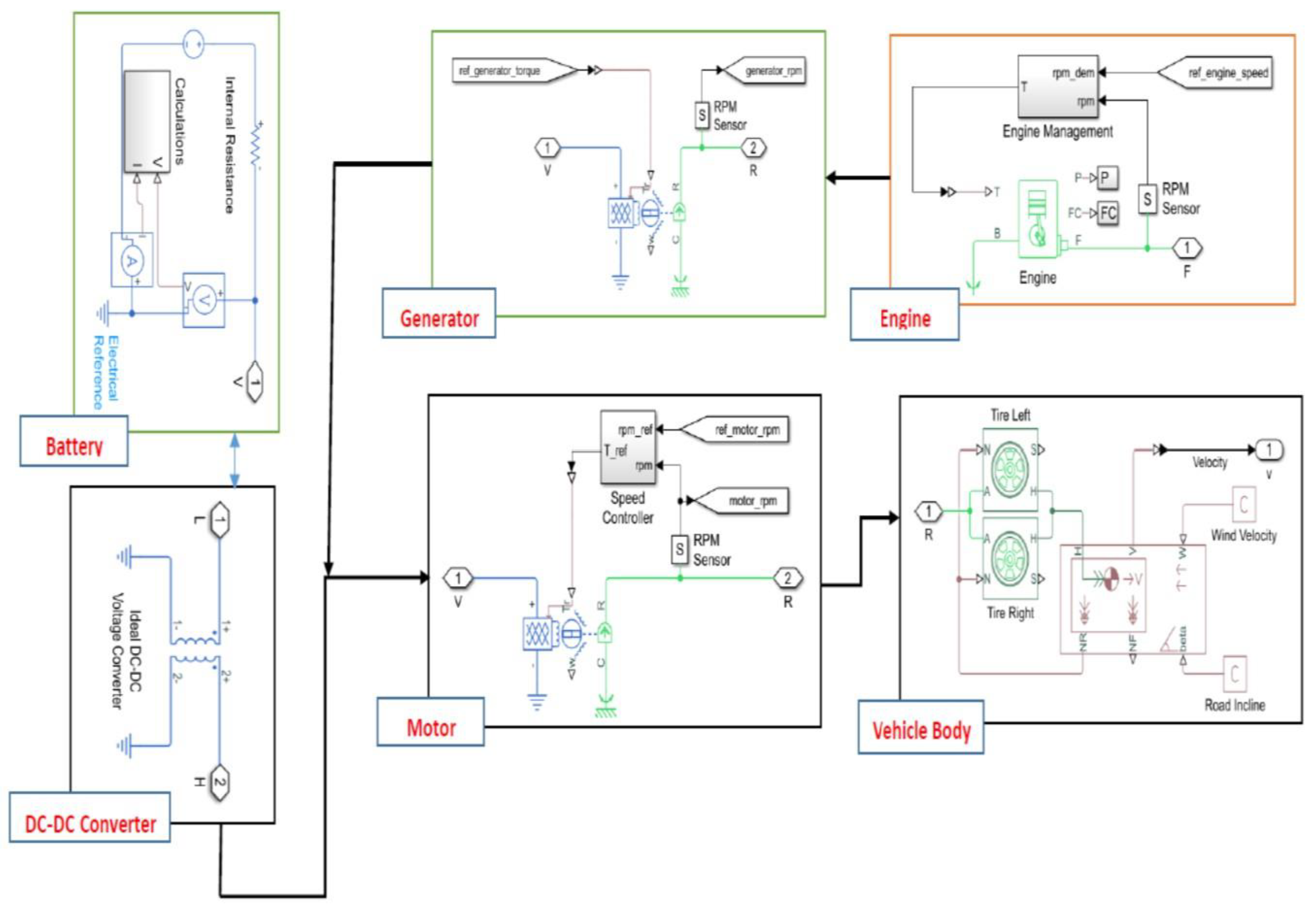
In this paper, the suggested type of HEV is a series HEV. A series drivetrain is used to achieve hybrids, in which only the electric motor gives mechanical power [
2,
3,
6,
9,
10,
11,
17]. The motor is operated by either an engine-powered generator or a battery pack. The simplest hybrid configuration is a series drivetrain. In a series hybrid, the motor is the sole source of power that drives the wheels. An electronic card is used to estimate how much power is drawn from the engine or generator, or battery pack. In addition to the engine or generator, regenerative braking can be used to recharge the battery. The series type operates with good performance during go-and-stop traffic, where engines are considered inefficient [
2,
3,
6,
9,
17]. The electronic card can control the operation of the motor by using the battery feed only, which will allow the engine to work in the operations in which it is better and more efficient. The batteries in the series type are considered more effective than the engine, so the engine is typically small. Due to the importance of the electrical part in HEVs, the focus of this research was on the design of speed control through the electric motor. As a result, the system was considered single input, single output (SISO) despite being multi-input, multi-output (MIMO). The rest of the paper is structured as follows.
Section 2 discusses the system modeling.
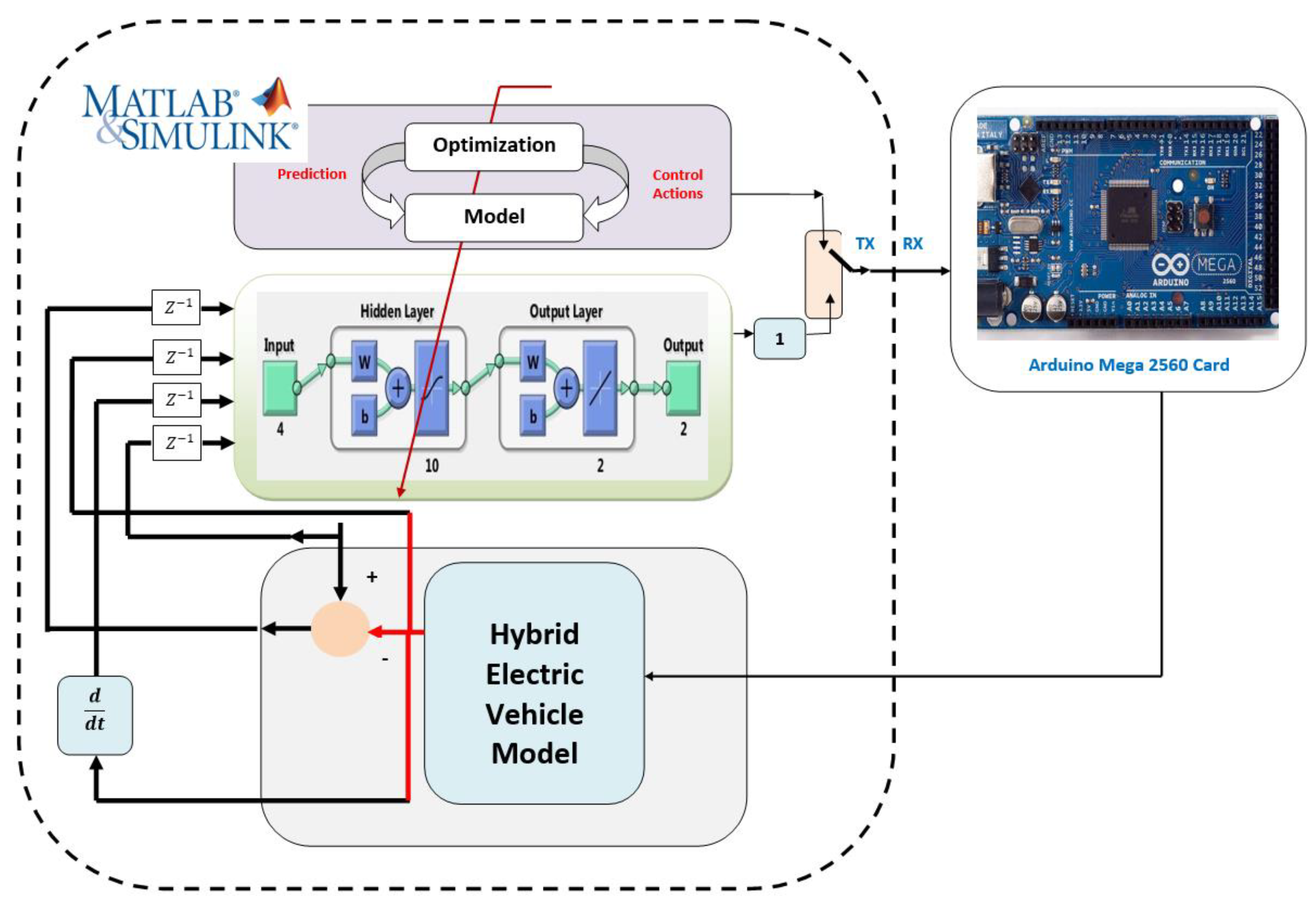
Section 3 presents the implementation of hardware in the loop, and
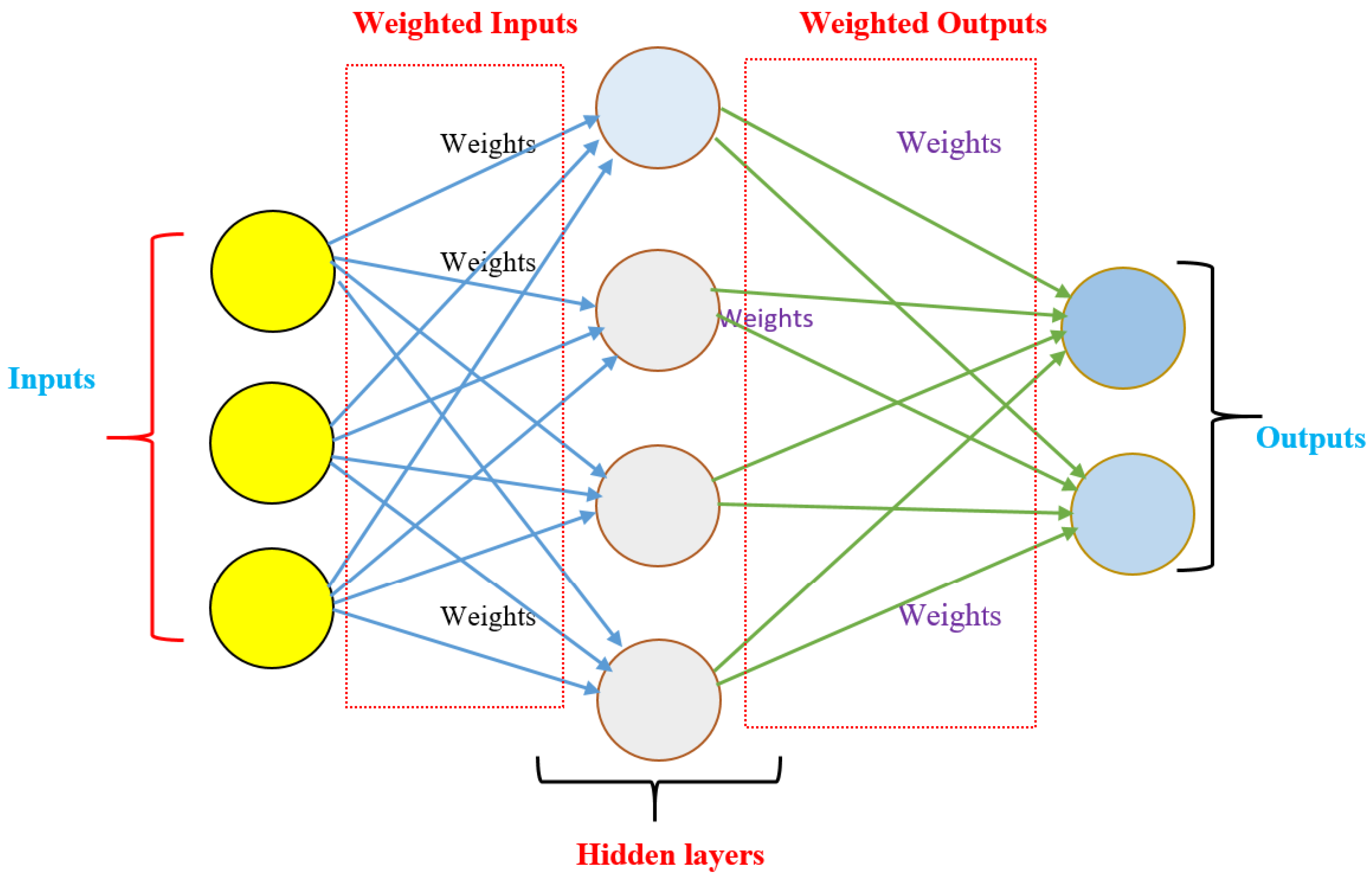
Section 4 demonstrates the structure and behavior of the ANN. In addition,
Section 5 introduces the MPC. Finally, the results and conclusion are given in
Section 6 and
Section 7, respectively. The contributions of the paper can be summarized as follows:





 ,
, 






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}