
A Novel Approach for Contextual Clustering and Retrieval of Behavior Trees to Enrich the Behavior of Social Intelligent Agents
 ,
,  , and
, and
Abstract
1. Introduction
2. Literature Review
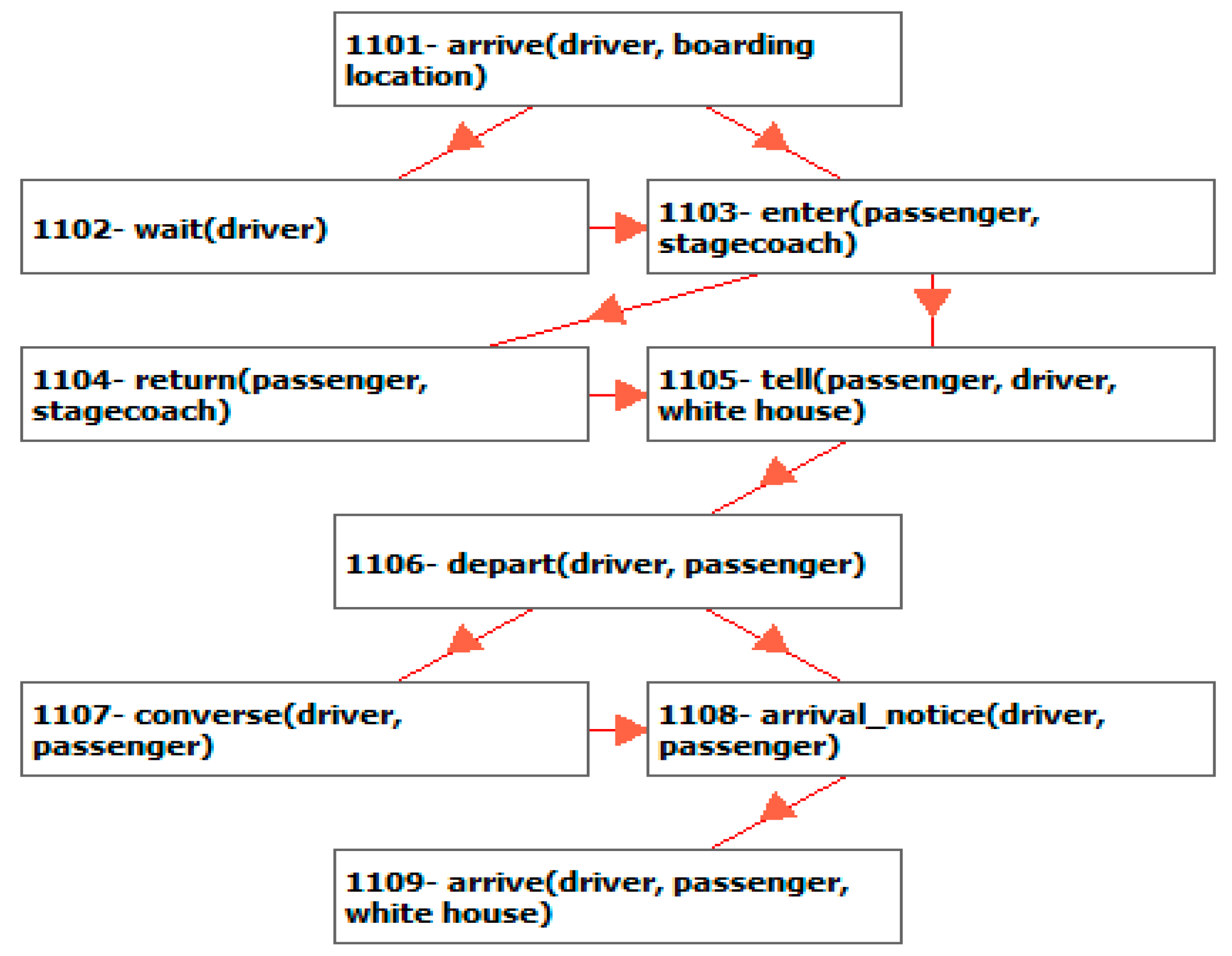
3. From Behavior Tree to Cognitive Script
4. Contextual Clustering and Retrieval Approach
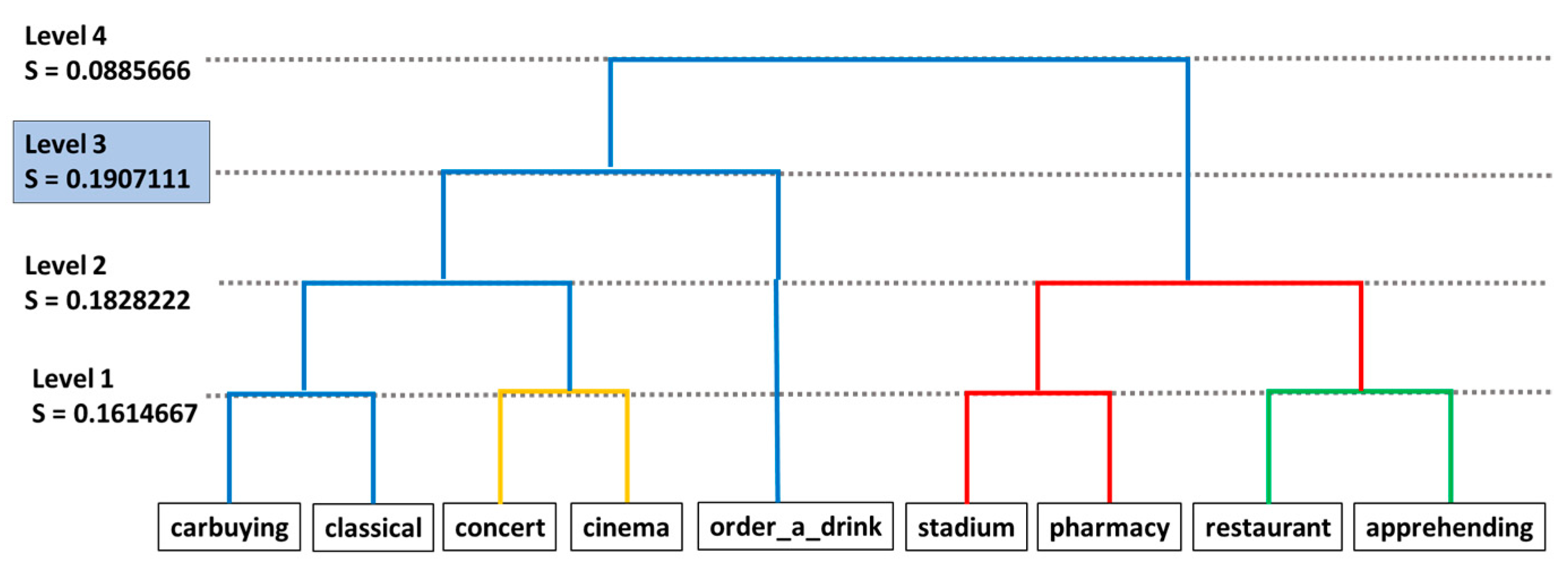
4.1. Hierarchical Clustering Based on Map-and-Reduce
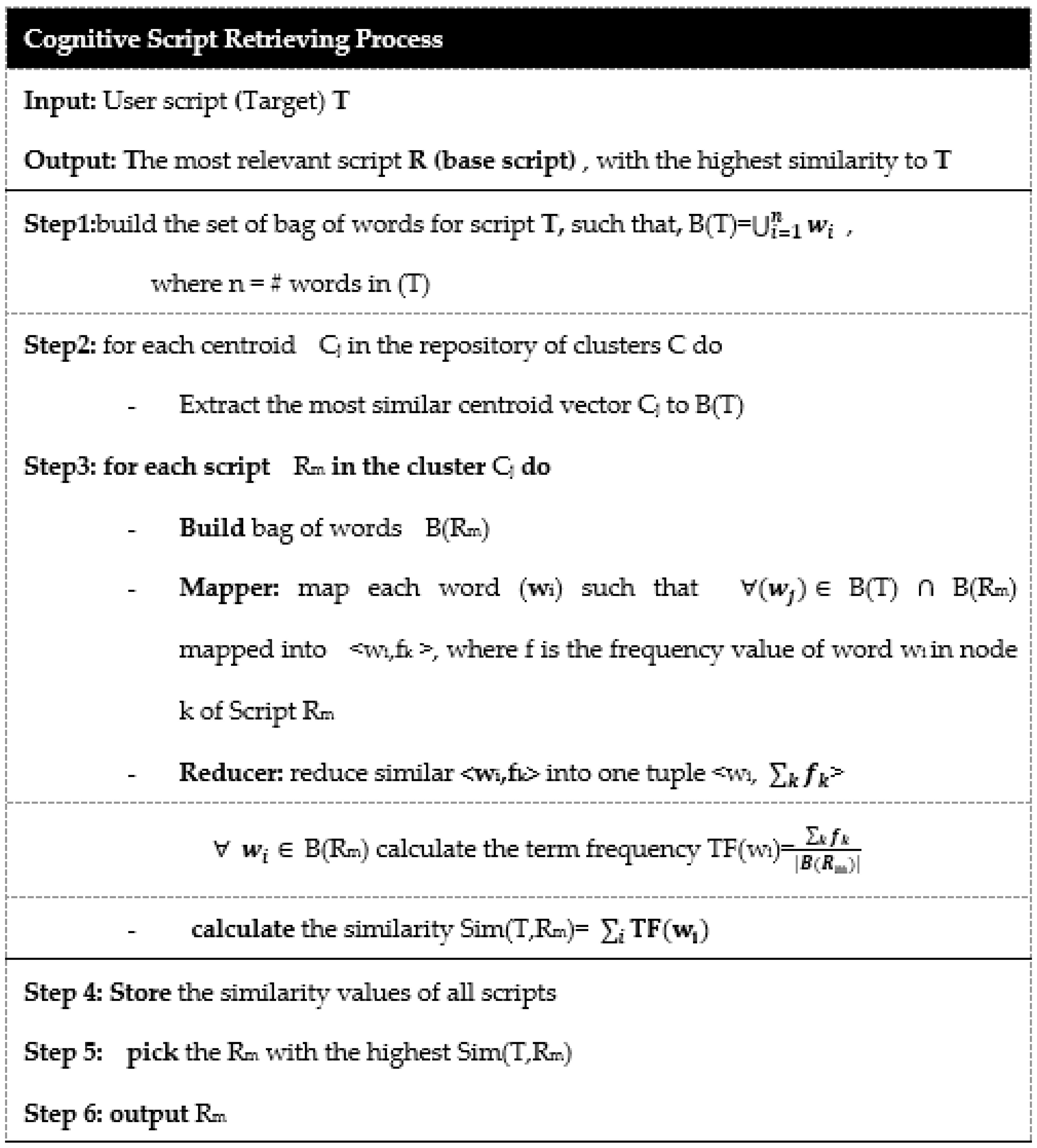
4.2. The Retrieval Process for Cognitive Scripts Using H-Clustering-Map-and-Reduce
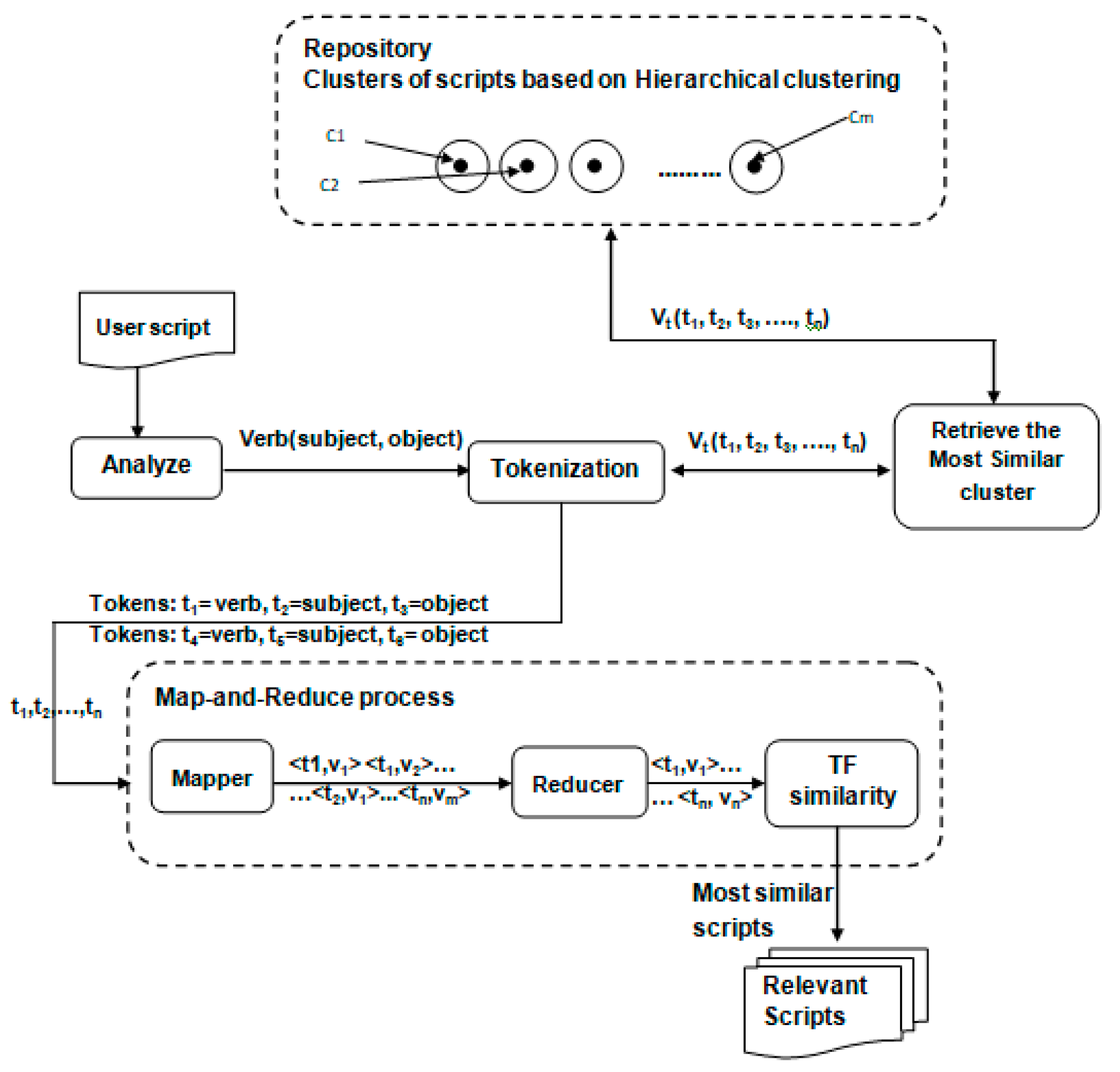
- The user enters the (target) script that is analyzed and tokenized into initial vector form.
- This vector is sent to the first phase in the retrieval process where the initial vector is compared with all the centroids.
- The cluster with the most similar centroid is picked, and all the scripts in this cluster are sent back to the tokenization process to be tokenized into a set of tokens.
- The produced tokens form the bag-of-words for each script, which are then mapped by the Mapper into a set of words with a unique index for each word.
- The reducer groups the repeated indices into one term associated with its frequency value.
- Finally, term frequency (TF) similarity is used to retrieve the most similar cognitive script from the chosen cluster.
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tamine-Lechani, L.; Boughanem, M.; Daoud, M. Evaluation of contextual information retrieval effectiveness: Overview of issues and research. Knowl. Inf. Syst. 2010, 24, 1–34. [Google Scholar] [CrossRef]
- Ullah, Z.; Jamjoom, M. An intelligent approach for Arabic handwritten letter recognition using convolutional neural network. PeerJ Comput. Sci. 2022, 8, e995. [Google Scholar] [CrossRef] [PubMed]
- Azarnov, D.A.; Chubarov, A.A.; Samsonovich, A.V. Virtual actor with social-emotional intelligence. Procedia Comput. Sci. 2018, 123, 76–85. [Google Scholar] [CrossRef]
- Ullah, Z.; Lajis, A.; Jamjoom, M.; Altalhi, A.; Saleem, F. Bloom’s taxonomy: A beneficial tool for learning and assessing students’ competency levels in computer programming using empirical analysis. Comput. Appl. Eng. Educ. 2020, 28, 1628–1640. [Google Scholar] [CrossRef]
- Ullah, Z.; Saleem, F.; Jamjoom, M.; Fakieh, B. Reliable prediction models based on enriched data for identifying the mode of childbirth by using machine learning methods: Development study. J. Med. Internet Res. 2021, 23, e28856. [Google Scholar] [CrossRef] [PubMed]
- Jamjoom, M.; Alabdulkreem, E.; Hadjouni, M.; Karim, F.; Qarh, M. Early Prediction for At-Risk Students in an Introductory Programming Course Based on Student Self-Efficacy. Informatica 2021, 45, 6. [Google Scholar] [CrossRef]
- Ullah, Z.; Jamjoom, M. A deep learning for Alzheimer’s stages detection using brain images. Comput. Mater. Contin. 2022, 74, 1457–1473. [Google Scholar] [CrossRef]
- Chella, A.; Lanza, F.; Seidita, V. Decision process in human-agent interaction: Extending JASON reasoning cycle. In International Workshop on Engineering Multi-Agent Systems; Springer: Cham, Switzerland, 2018; pp. 320–339. [Google Scholar]
- Pilato, G.; Vassallo, G.; Augello, A.; Vasile, M.; Gaglio, S. Expert chat-bots for cultural heritage. Intell. Artif. 2005, 2, 25–31. [Google Scholar]
- Augello, A.; Pilato, G.; Gaglio, S. Intelligent advisor agents in distributed environments. In Information Retrieval and Mining in Distributed Environments. Studies in Computational Intelligence; Soro, A., Vargiu, E., Armano, G., Paddeu, G., Eds.; Springer: Berlin, Germany, 2011; Volume 324, pp. 109–124. [Google Scholar]
- Tikhomirova, D.V.; Chubarov, A.A.; Samsonovich, A.V. Empirical and modeling study of emotional state dynamics in social videogame paradigms. Cogn. Syst. Res. 2020, 60, 44–56. [Google Scholar] [CrossRef]
- Augello, A.; Pilato, G.; Gaglio, S. A conversational agent to support decisions in SimCity like games. Proc. IEEE ICSC 2009, 2009, 367–372. [Google Scholar]
- Monceaux, J.; Becker, J.; Boudier, C.; Mazel, A. Demonstration—First Steps in Emotional Expression of the Humanoid Robot Nao. In Proceedings of the ICMI-MLMI’09, Cambridge, MA, USA, 2–4 November 2009; pp. 235–236, ACM 978-1-60558-772-1/09/11. [Google Scholar]
- Abbas, S.; Hodhod, R.; El-Sheikh, M. Retrieval of behavior trees using map-and-reduce technique. Egypt. Inform. J. 2022, 23, 55–64. [Google Scholar] [CrossRef]
- Allahbakhsh, M.; Ignjatovic, A.; Benatallah, B.; Foo, N.; Bertino, E. Representation and querying of unfair evaluations in social rating systems. Comput. Secur. 2014, 41, 68–88. [Google Scholar] [CrossRef]
- Colledanchise, M.; Parasuraman, R.; Ögren, P. Learning of behavior trees for autonomous agents. IEEE Trans. Games 2019, 11, 183–189. [Google Scholar] [CrossRef]
- Hodhod, R.; Magerko, B.; Gawish, M. Pharaoh: Context-Based Structural Retrieval of Cognitive Scripts. Int. J. Inf. Retr. Res. 2013, 2, 58–71. [Google Scholar] [CrossRef]
- Bouchard, B.; Bouchard, K.; Gaboury, S.; Francillette, Y. Modeling Human Activities Using Behaviour Trees in Smart Homes. In Proceedings of the PETRA ’18: The 11th PErvasive Technologies Related to Assistive Environments Conference, Corfu, Greece, 26–29 June 2018; pp. 67–74. [Google Scholar]
- Francillette, Y.; Boucher, E.; Bier, N.; Lussier, M.; Bouchard, K.; Belchior, P.; Gaboury, S. Modeling the behavior of persons with mild cognitive impairment or Alzheimer’s for intelligent environment simulation. User Model User Adapt. Interact. 2020, 30, 895–947. [Google Scholar] [CrossRef]
- Dey, R.; Child, C. QL-BT: Enhancing behavior tree design and implementation with Q-learning. In Proceedings of the IEEE Conference on Computational Intelligence in Games (CIG), Niagara Falls, ON, Canada, 11–13 August 2013; IEEE: Niagara Falls, ON, Canada, 2013; pp. 1–8. [Google Scholar] [CrossRef]
- Fu, Y.; Qin, L.; Yin, Q. A reinforcement learning behavior tree framework for game AI. In Proceedings of the 2016 International Conference on Economics, Social Science, Arts, Education and Management Engineering, Huhhot, China, 30–31 July 2016; Atlantis Press: Huhhot, China, 2016. [Google Scholar] [CrossRef]
- Zhang, Q.; Sun, L.; Jiao, P.; Yin, Q. Combining behavior trees with MAXQ learning to facilitate CGFs behavior modeling. In Proceedings of the 4th International Conference on Systems and Informatics (ICSAI), Hangzhou, China, 11–13 November 2017; pp. 525–531. [Google Scholar] [CrossRef]
- Zhu, X. Behavior tree design of intelligent behavior of non-player character (NPC) based on Unity3D. J. Intell. Fuzzy Syst. 2019, 37, 6071–6079. [Google Scholar] [CrossRef]
- Hölzl, M.; Gabor, T. Reasoning and learning for awareness and adaptation. Software Engineering for Collective Autonomic Systems: The ASCENS Approach. In Lecture Notes in Computer Science; Wirsing, M., Hölzl, M., Koch, N., Mayer, P., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 249–290. [Google Scholar] [CrossRef]
- Hölzl, M.; Gabor, T. Continuous collaboration: A case study on the development of an adaptive cyber-physical system. In Proceedings of the IEEE/ACM 1st International Workshop on Software Engineering for Smart CyberPhysical Systems, Florence, Italy, 17 May 2015; pp. 19–25. [Google Scholar] [CrossRef]
- Kartasev, M. Integrating Reinforcement Learning into Behavior Trees by Hierarchical Composition. Ph.D. Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2019. [Google Scholar]
- Pereira, R.d.P.; Engel, M.P. A framework for constrained and adaptive behavior-based agents. arXiv 2015, arXiv:1506.02312. [Google Scholar]
- Banerjee, B. Autonomous acquisition of behavior trees for robot control. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 3460–3467. [Google Scholar] [CrossRef]
- Rothlauf, F.; Oetzel, M. On the locality of grammatical evolution. In European Conference on Genetic Programming; Springer: Berlin/Heidelberg, Germany, 2006; pp. 320–330. [Google Scholar]
- Lim, C.-U.; Baumgarten, R.; Colton, S. Evolving behaviour trees for the commercial game DEFCON. In Applications of Evolutionary Computation; Springer: Berlin/Heidelberg, Germany, 2010; Volume 6024, pp. 100–110. [Google Scholar] [CrossRef]
- Perez, D.; Nicolau, M.; O’Neill, M.; Brabazon, A. Evolving behavior trees for the Mario AI competition using grammatical evolution. Applications of Evolutionary Computation. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2011; pp. 123–132. [Google Scholar]
- Hoff, J.W.; Christensen, J.H. Evolving Behaviour Trees: Automatic Generation of AI Opponents for Real-Time Strategy Games. Ph.D. Thesis, NTNU, Tronheim, Norway, 2016. [Google Scholar]
- Estgren, M.; Jansson, E.S.V. Behaviour Tree Evolution by Genetic Programming; Linköping University: Linkoping, Sweden, 2017. [Google Scholar]
- Paduraru, C.; Paduraru, M. Automatic Difficulty Management and Testing in Games Using a Framework Based on Behavior Trees and Genetic Algorithms. arXiv 2019, arXiv:1909.04368. [Google Scholar]
- Zhang, Q.; Xu, K.; Jiao, P.; Yin, Q. Behavior modeling for autonomous agents based on modified evolving behavior trees. In Proceedings of the IEEE 7th Data Driven Control and Learning Systems Conference (DDCLS), Enshi, China, 25–27 May 2018; pp. 1140–1145. [Google Scholar] [CrossRef]
- Nicolau, M.; Perez-Liebana, D.; O’Neill, M.; Brabazon, A. Evolutionary behavior tree approaches for navigating platform games. IEEE Trans Comput. Intell. AI Games 2017, 9, 227–238. [Google Scholar] [CrossRef]
- Yao, J.; Huang, Q.; Wang, W. Adaptive human behavior modeling for air combat simulation. In Proceedings of the IEEE/ACM 19th International Symposium on Distributed Simulation and Real Time Applications (DS-RT), Chengdu, China, 14–16 October 2015; pp. 100–103. [Google Scholar] [CrossRef]
- Eilert, P. Learning Behaviour Trees for Simulated Fighter Pilots in Airborne Reconnaissance Missions: A Grammatical Evolution Approach. Ph.D. Thesis, Linköping University, Linkoping, Sweden, 2019. [Google Scholar]
- Berthling-Hansen, G.; Morch, E.; Løvlid, A.R.; Gundersen, E.O. Automating behaviour tree generation for simulating troop movements (poster). In Proceedings of the IEEE Conference on Cognitive and Computational Aspects of Situation Management (CogSIMA), Boston, MA, USA, 11–14 June 2018; pp. 147–153. [Google Scholar] [CrossRef]
- Neupane, A. Emergence of Collective Behaviors in hub-Based Colonies Using Grammatical Evolution and Behavior Trees. Ph.D. Thesis, Brigham Young University, Prover, UT, USA, 2019. [Google Scholar]
- Schwab, P.; Hlavacs, H. Capturing the essence: Towards the automated generation of transparent behavior models. In Proceedings of the Artificial Intelligence and Interactive Digital Entertainment Conference, Santa Cruz, CA, USA, 14–18 November 2015. [Google Scholar] [CrossRef]
- Neupane, A.; Goodrich, M. Designing emergent swarm behaviors using behavior trees and grammatical evolution. In Proceedings of the International Joint Conference on Autonomous Agents and Multiagent Systems, AAMAS, Montreal, QC, Canada, 13–17 May 2019; Volume 4, pp. 2138–2140. [Google Scholar]
- Jones, S.; Studley, M.; Hauert, S.; Winfield, A. Evolving Behaviour Trees for Swarm Robotics. In Distributed Autonomous Robotic Systems. Springer Proceedings in Advanced Robotics; Springer: Cham, Switzerland, 2018; Volume 6. [Google Scholar] [CrossRef]
- Hallawa, A.; Schug, S.; Iacca, G.; Ascheid, G. Evolving instinctive behaviour in resource-constrained autonomous agents using grammatical evolution. Applications of Evolutionary Computation. In Lecture Notes in Computer Science; Castillo, A.P., Jiménez Laredo, J.L., Fernández de Vega, F., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 369–383. [Google Scholar] [CrossRef]
- Palma, R.; González-Calero, P.A.; Gómez-Martín, M.A.; Gómez-Martín, P.P. Extending case-based planning with behavior trees. In Proceedings of the Twenty-Fourth International FLAIRS Conference, Palm Beach, FL, USA, 18–20 May 2011. [Google Scholar]
- Palma, R.; Sánchez-Ruiz, A.A.; Gómez-Martín, M.A.; Gómez-Martín, P.P.; González-Calero, P.A. Combining expert knowledge and learning from demonstration in real-time strategy games. In Case-Based Reasoning Research and Development; Lecture Notes in Computer Science; Ram, A., Wiratunga, N., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 181–195. [Google Scholar]
- Flórez-Puga, G.; Gómez-Martín, M.; Díaz-Agudo, B.; González-Calero, P.A. Dynamic expansion of behaviour trees. In Proceedings of the Fourth AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment; AIIDE’08. AAAI Press: Stanford, CA, USA, 2008; pp. 36–41. [Google Scholar]
- Zhang, Q.; Yin, Q.; Xu, K. Towards an integrated learning framework for behavior modeling of adaptive CGFs. In Proceedings of the 9th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 10–11 December 2016; Volume 2, pp. 7–12. [Google Scholar] [CrossRef]
- Agis, R.A.; Gottifredi, S.; García, A.J. An event-driven behavior trees extension to facilitate non-player multi-agent coordination in video games. Expert Syst. Appl. 2020, 155, 113457. [Google Scholar] [CrossRef]
- Iovino, M.; Scukins, E.; Styrud, J.; Ögren, P.; Smith, C. A survey of Behavior Trees in robotics and AI. Robot. Auton. Syst. 2022, 154, 104096. [Google Scholar] [CrossRef]
- Liao, J.; Zhao, Y.; Long, S. A parallel algorithm adapted for mining big data. In Proceedings of the IEEE Workshop on Electronics, Computer and Applications, Ottawa, ON, Canada, 8–9 May 2014; pp. 564–568. [Google Scholar]
- Hashem, I.A.T.; Chang, V.; Anuar, B.N.; Adewole, K.; Yaqoob, I.; Gani, A.; Chiroma, H. The role of big data in smart city. Int. J. Inf. Manag. 2016, 36, 748–758. [Google Scholar] [CrossRef]
- Permar, J.; Magerko, B. A Conceptual Blending Approach to the Generation of Cognitive Scripts for Interactive Narrative. In Proceedings of the AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment, Virtual, 11–15 October 2021; Volume 9, pp. 44–50. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parent Node | Child Node | ||
|---|---|---|---|
| IID | Form | IID | Form |
| 1101 | arrive(driver, boarding location) | 1102 | wait(driver) |
| 1101 | arrive(driver, boarding location) | 1103 | enter(passenger, stagecoach) |
| 1102 | wait(driver) | 1103 | enter(passenger, stagecoach) |
| 1103 | enter(passenger, stagecoach) | 1104 | return(passenger, stagecoach) |
| 1103 | enter(passenger, stagecoach) | 1105 | tell(passenger, driver, white house) |
| 1104 | return(passenger, stagecoach) | 1105 | tell(passenger, driver, white house) |
| 1105 | tell(passenger, driver, white house) | 1106 | depart(driver, passenger) |
| 1106 | depart(driver, passenger) | 1107 | converse(driver, passenger) |
| 1106 | depart(driver, passenger) | 1108 | arrival_notice(driver, passenger) |
| 1107 | converse(driver, passenger) | 1108 | arrival_notice(driver, passenger) |
| 1108 | arrival_notice(driver, passenger) | 1109 | arrive(driver, passenger, white house) |
| ID | Script | Code | Nodes | Words |
|---|---|---|---|---|
| 1 | car-buying | S-1 | 16 | 34 |
| 2 | classical | S-2 | 17 | 32 |
| 3 | concert | S-3 | 20 | 38 |
| 4 | cinema | S-4 | 13 | 20 |
| 5 | stadium | S-5 | 15 | 25 |
| 6 | pharmacy | S-6 | 13 | 24 |
| 7 | restaurant | S-7 | 21 | 44 |
| 8 | apprehending | S-8 | 5 | 9 |
| 9 | order-a-drink | S-9 | 10 | 17 |
| 10 | stagecoach | S-10 | 9 | 19 |
| 11 | tour-bus | S-11 | 8 | 21 |
| 12 | cat-owner | S-12 | 13 | 24 |
| 13 | cattle-drive | S-13 | 11 | 21 |
| 14 | derrick-rose | S-14 | 10 | 15 |
| 15 | bullfight | S-15 | 8 | 14 |
| Query Script (Target) | Human Participants (Retrieved Script) |
|---|---|
| apprehending | None |
| car_buying | Pharmacy |
| Cinema | Stadium |
| classical | Concert |
| concert | Classical |
| order_a_drink | Restaurant |
| pharmacy | order_a_drink |
| restaurant | order_a_drink |
| stadium | Cinema |
| stagecoach | tour-bus |
| tour-bus | Stagecoach |
| cat-owner | cattle-drive |
| cattle-drive | cat-owner |
| derrick-rose | Bullfight |
| Bullfight | derrick-rose |
| Query Script | H-Map and Reduce | H-LCP | ||
|---|---|---|---|---|
| Retrieved Script | Retrieving Time | Retrieved Script | Retrieving TIME | |
| apprehending | car_buying | 0.00700 | car_buying | 3.36573 |
| car_buying | Order_a_drink | 0.00800 | PHARMACY * | 3.33244 |
| Cinema | STADIUM * | 0.00500 | STADIUM * | 3.41039 |
| Classical | CONCERT * | 0.00700 | CONCERT * | 3.59187 |
| Concert | CLASSICAL * | 0.00746 | CLASSICAL * | 3.50024 |
| Order_a_drink | RESTAURANT * | 0.00800 | PHARMACY | 3.33244 |
| Pharmacy | RESTAURANT | 0.00632 | RESTAURANT | 3.21454 |
| Restaurant | ORDER_a_DRINK * | 0.00711 | PHARMACY | 3.57359 |
| Stadium | CONCERT | 0.00600 | CONCERT | 3.37495 |
| stage_coach | cinema | 0.00703 | CAR_BUYING | 3.17081 |
| tour_bus | CAR_BUYING | 0.00500 | CAR_BUYING | 3.16260 |
| cat_owner | Cattle_drive * | 0.00400 | CATTLE_DRIVE * | 1.61438 |
| cattle_drive | CAT_OWNER * | 0.00300 | CAT_OWNER * | 1.57649 |
| derrick_rose | BULL_FIGHT * | 0.02100 | STADIUM | 3.37459 |
| Bullfight | DERRICK_ROSE * | 0.02100 | STADIUM | 3.37459 |
| Average Retrieval Time | 0.00819 | 3.13131 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jamjoom, M.; Ahmed, N.; Abbas, S.; Hodhod, R.; El-Sheikh, M.; Ullah, Z. A Novel Approach for Contextual Clustering and Retrieval of Behavior Trees to Enrich the Behavior of Social Intelligent Agents. Electronics 2023, 12, 970. https://doi.org/10.3390/electronics12040970
Jamjoom M, Ahmed N, Abbas S, Hodhod R, El-Sheikh M, Ullah Z. A Novel Approach for Contextual Clustering and Retrieval of Behavior Trees to Enrich the Behavior of Social Intelligent Agents. Electronics. 2023; 12(4):970. https://doi.org/10.3390/electronics12040970
Chicago/Turabian StyleJamjoom, Mona, Nada Ahmed, Safia Abbas, Rania Hodhod, Mohamed El-Sheikh, and Zahid Ullah. 2023. "A Novel Approach for Contextual Clustering and Retrieval of Behavior Trees to Enrich the Behavior of Social Intelligent Agents" Electronics 12, no. 4: 970. https://doi.org/10.3390/electronics12040970
APA StyleJamjoom, M., Ahmed, N., Abbas, S., Hodhod, R., El-Sheikh, M., & Ullah, Z. (2023). A Novel Approach for Contextual Clustering and Retrieval of Behavior Trees to Enrich the Behavior of Social Intelligent Agents. Electronics, 12(4), 970. https://doi.org/10.3390/electronics12040970