1. Introduction
A brain–computer interface (BCI) system can achieve direct communication or device control between the brain and external devices via a virtual channel to aid the recovery of patients with movement dysfunction [
1,
2,
3,
4]. Recently, motor imagery (MI) BCI systems have received increasing attention in the field of motor rehabilitation for patients with movement dysfunction. In practice, lower-limb BCI systems are required to accurately and rapidly identify a patient’s lower-limb movement intention in the task of motor rehabilitation [
5,
6,
7,
8]. The major challenge in BCI systems are the design of experimental paradigm and the efficient utilization of both training set and testing trial to boost the BCI performance.
The stimulation protocol has long been an important tool for exploring the organization and function of the nervous system, as well as an important communication channel for BCI. In recent years, a variety of sensory stimulation have been used in BCI experimental paradigms. In [
9], a way was examined to enhance the classification accuracy by electrically stimulating the ulnar nerve of the contralateral wrist at the alpha frequency during motor imagination. In [
10], a training strategy was designed to improve event-related desynchronization (ERD) of alpha rhythm by combining MI and sensory threshold somatosensory electrical stimulation. In [
11], an EEG phase-dependent stimulation method was designed to helping the subjects to produce stronger event-related desynchronization (ERD) and sustain longer by applying vibration stimulation in MI phase. In [
12], a BCI experimental paradigm was proposed to obtain a better BCI accuracy by utilizing sensory threshold neuromuscular electrical stimulation during performance of motor imagery. In [
13], a MI-based BCI was proposed to activate the motor-related cortex and enhance the
coefficient in the alpha–beta band by utilizing tactile sensation assisted motor imagery training approach. In [
14], a hybrid MI-BCI system was designed to improve MI-BCI performance by training participants in MI with the help of sensory stimulus from tangible objects.
The algorithms of EEG decoding constitute necessary components of BCI; we achieved this purpose by using unsupervised dimensionality reduction and feature representation in the processing of electroencephalogram (EEG) signals. The unsupervised dimensionality reduction method can project high-dimensional EEG signals into low-dimensional features with discriminative information; this process can provide the basis for accurately representing the testing trial EEG to improve decoding performance. Recently, various unsupervised dimensionality reduction methods have been proposed for feature extraction in BCI systems. For example, in [
15], an unsupervised multiset feature learning method was proposed to learn effective features and reduce the redundant features by conducting distance-based clustering for the feature sets. In [
16], a compact and unsupervised EEG response representation was proposed to obtain discriminative features by employing segment-level feature extraction and leveraging a robust two-part unsupervised generative model. In [
17], unsupervised discriminative feature selection (UDFS) was designed to learn the dominant features by considering the relationship between feature dimensions. In [
18], a deep convolution network and autoencoder-based model was presented to effectively learn low-dimensional features from high-dimensional EEG data by combining convolution with deconvolution. In [
19], feature extraction based on an echo state network (FE-ESN) was proposed to obtain optimal features by applying recurrent autoencoders to multivariate EEG signals. The basis learned from the above unsupervised dimensionality reduction methods can help represent the features of testing trial EEGs to quickly identify movement intentions.
To achieve fast decoding, the dimensionality reduction model cannot be retrained during the testing process, because model retraining results in time-consuming testing trial classification. Therefore, the best approach is to represent the features of an testing trial EEG based on the basis learned from the training set. The feature representation problem can be regarded as a weight calculation problem for each basis. For example, in [
20], the sparse weights for the basis were learned by iteratively minimizing the upper bound of the objective function in a motor imagery (MI) EEG classification. In [
21], the notable sparse weights for the basis were computed by measuring the distance information between the training samples and the test data using a Euclidean distance-based Gaussian kernel for MI classification. In [
22], the discriminative sparse weights for the basis were calculated by finding the membership of training EEG signals to cluster in mild cognitive impairment diagnosis. In [
23], significant sparse weights were learned by reducing the within-class diversity and increasing the between-class separation for EEG emotion recognition.
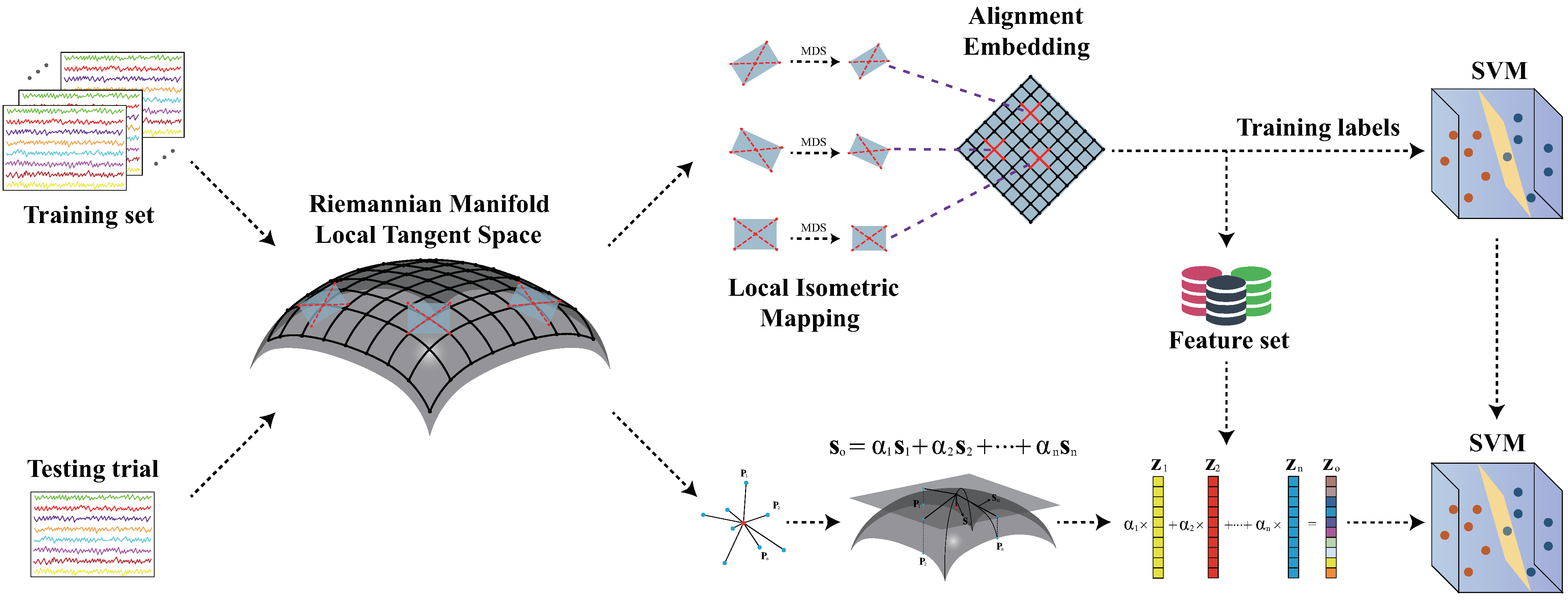
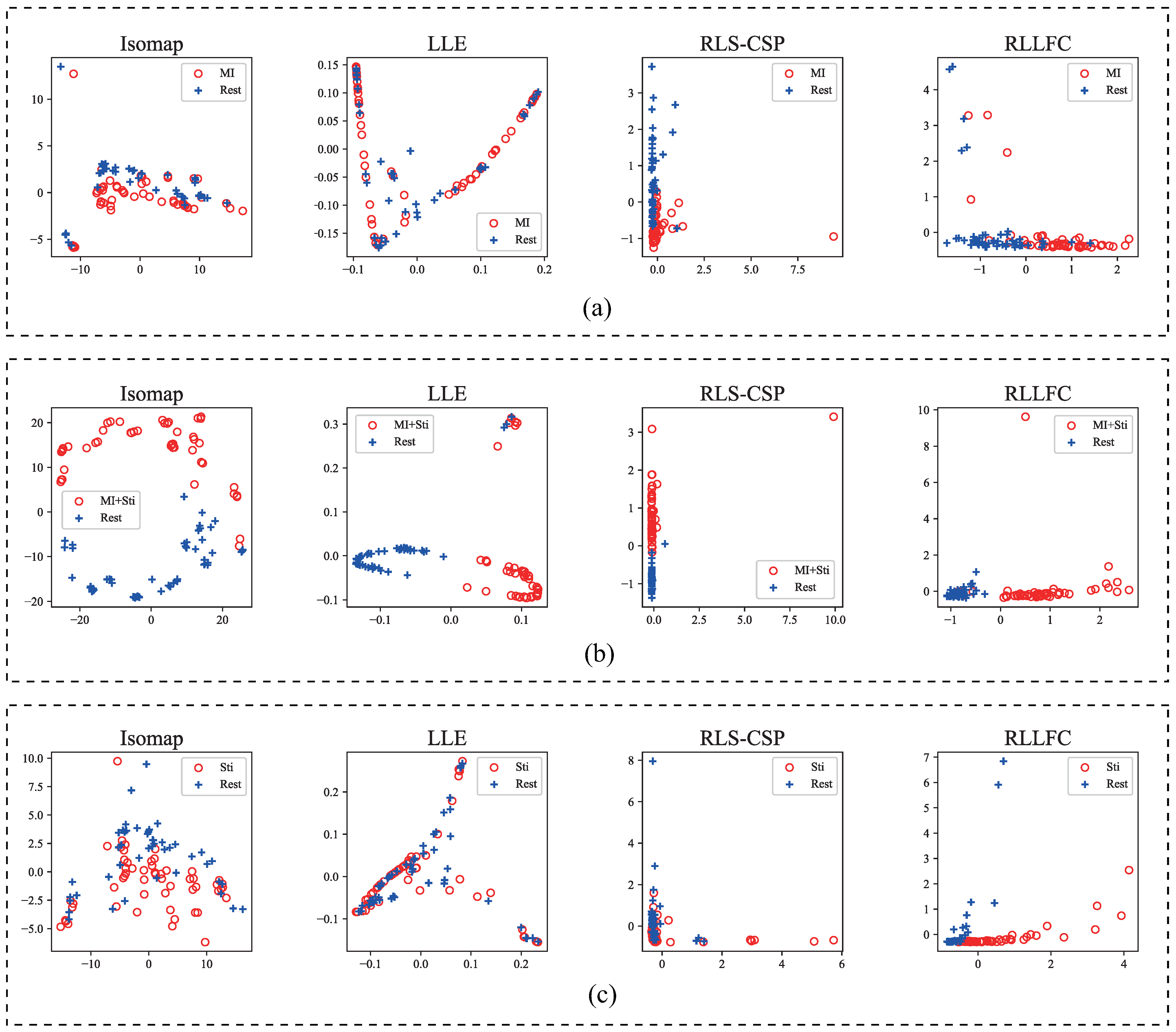
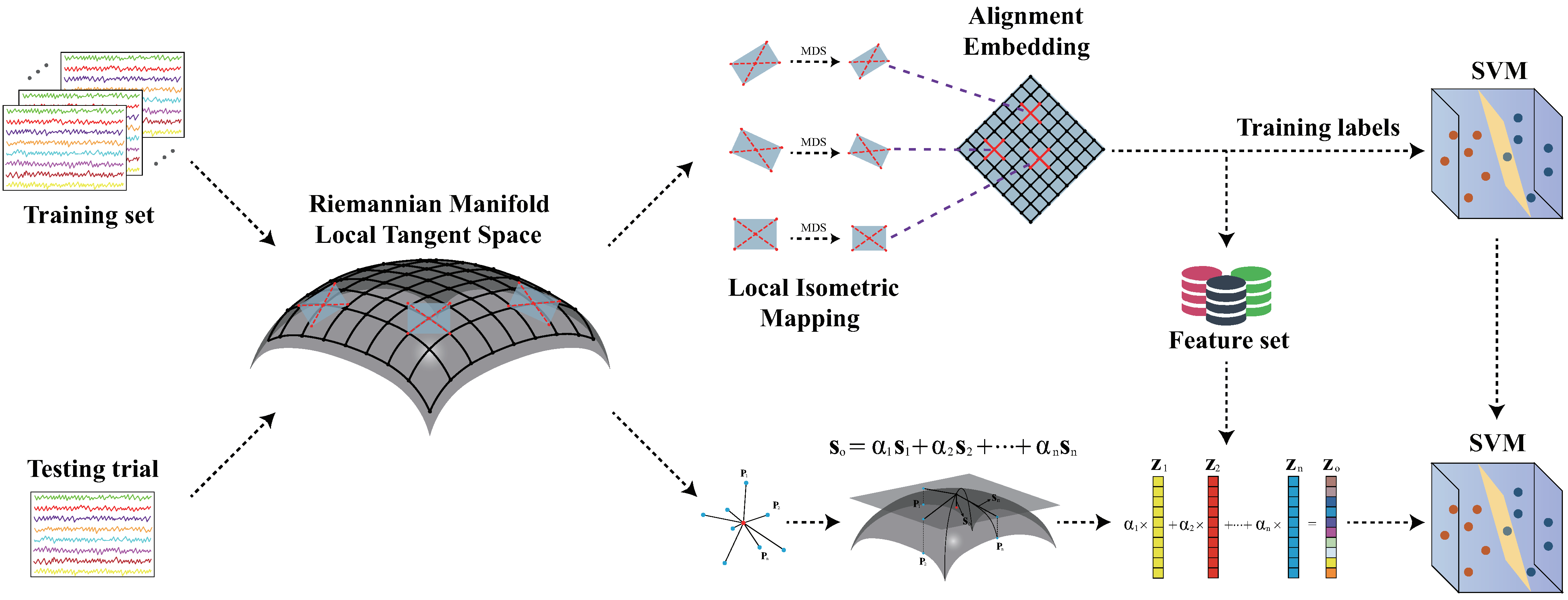
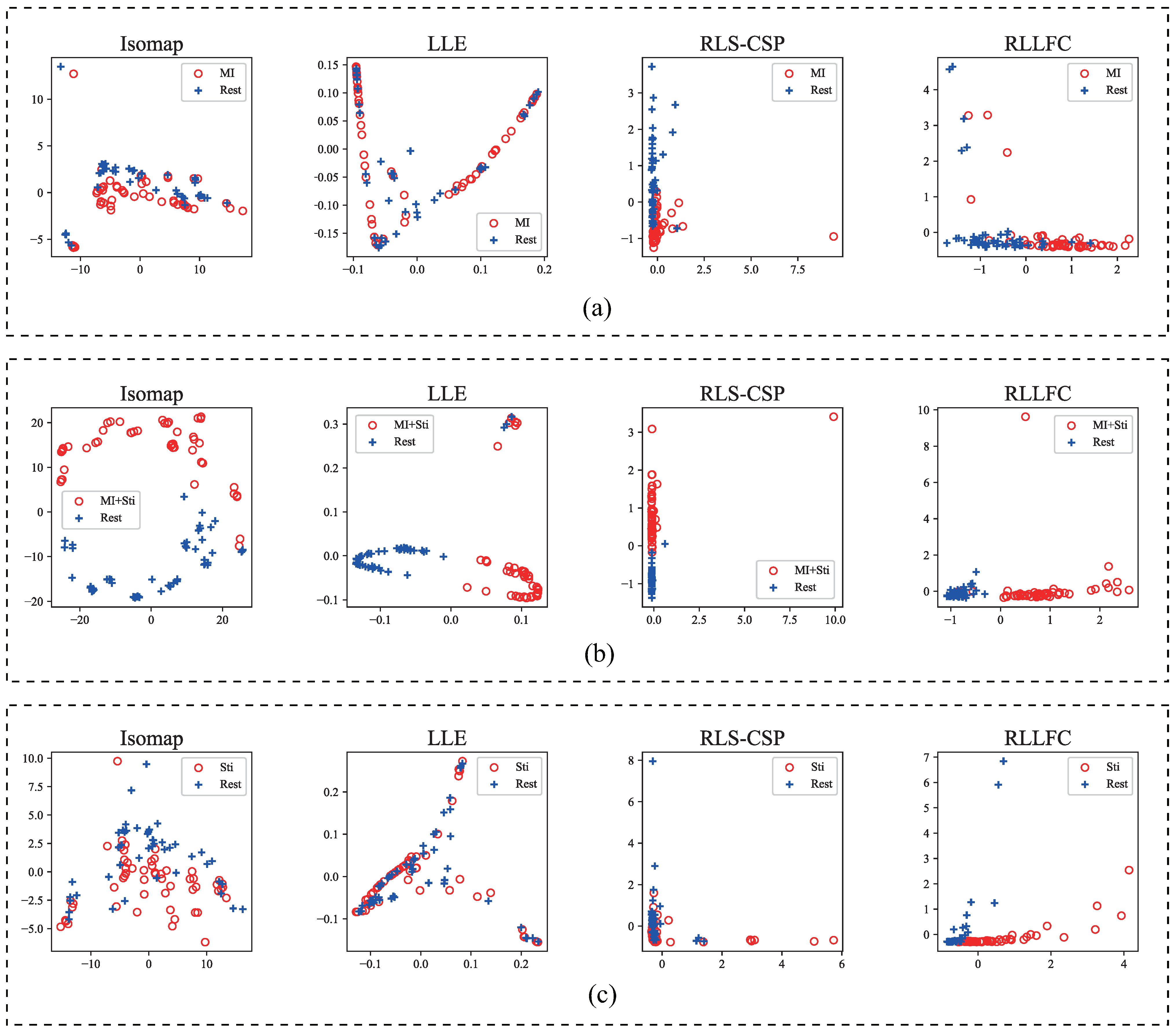
Although many efficient unsupervised basis learning and weight calculation methods have been proposed to quickly represent the testing trial EEG with a linear weighted combination of the basis learned from the training set, most of these approaches learn the basis without considering the fact that the high-dimensional EEG signal lies in a non-Euclidean space. It should be noted that the low-dimensional feature basis can be extended as a Euclidean space while the original EEG signal space is a non-Euclidean space. Therefore, the fundamental challenge in feature representation is to ensure that the learned basis maximally preserves the real relationship between EEG samples in a non-Euclidean space. In view of the shortcomings of the feature representation problem, in this study, a novel decoding method based on the Riemannian local linear feature construct (RLLFC) was designed to improve the performance of lower-limb rehabilitation BCI systems. In the proposed RLLFC method, the Riemannian geodesic distance is used to characterize the relationship between EEG samples, based on the assumption that the covariance matrices of the EEG signal lie on a differential Riemannian manifold [
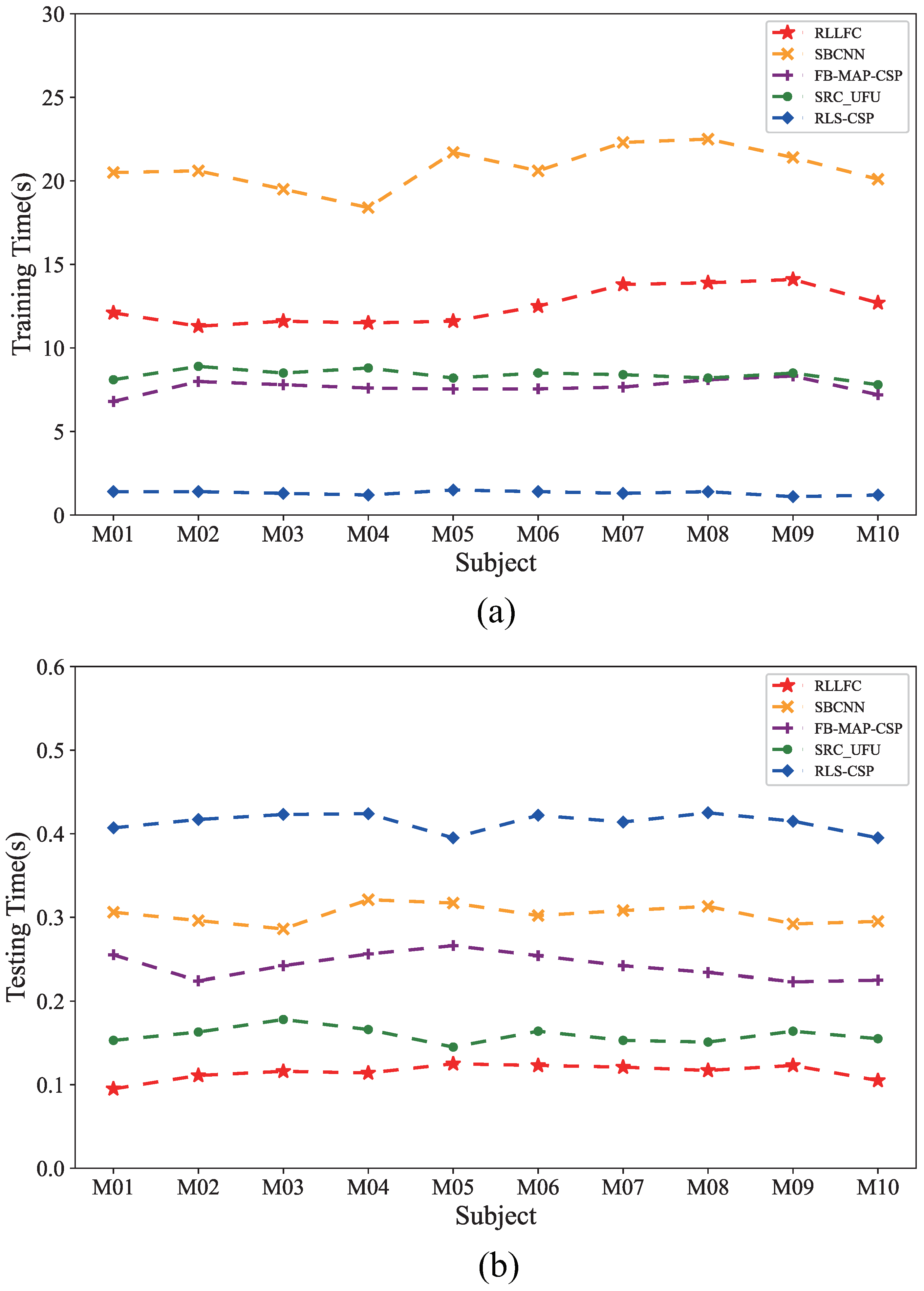
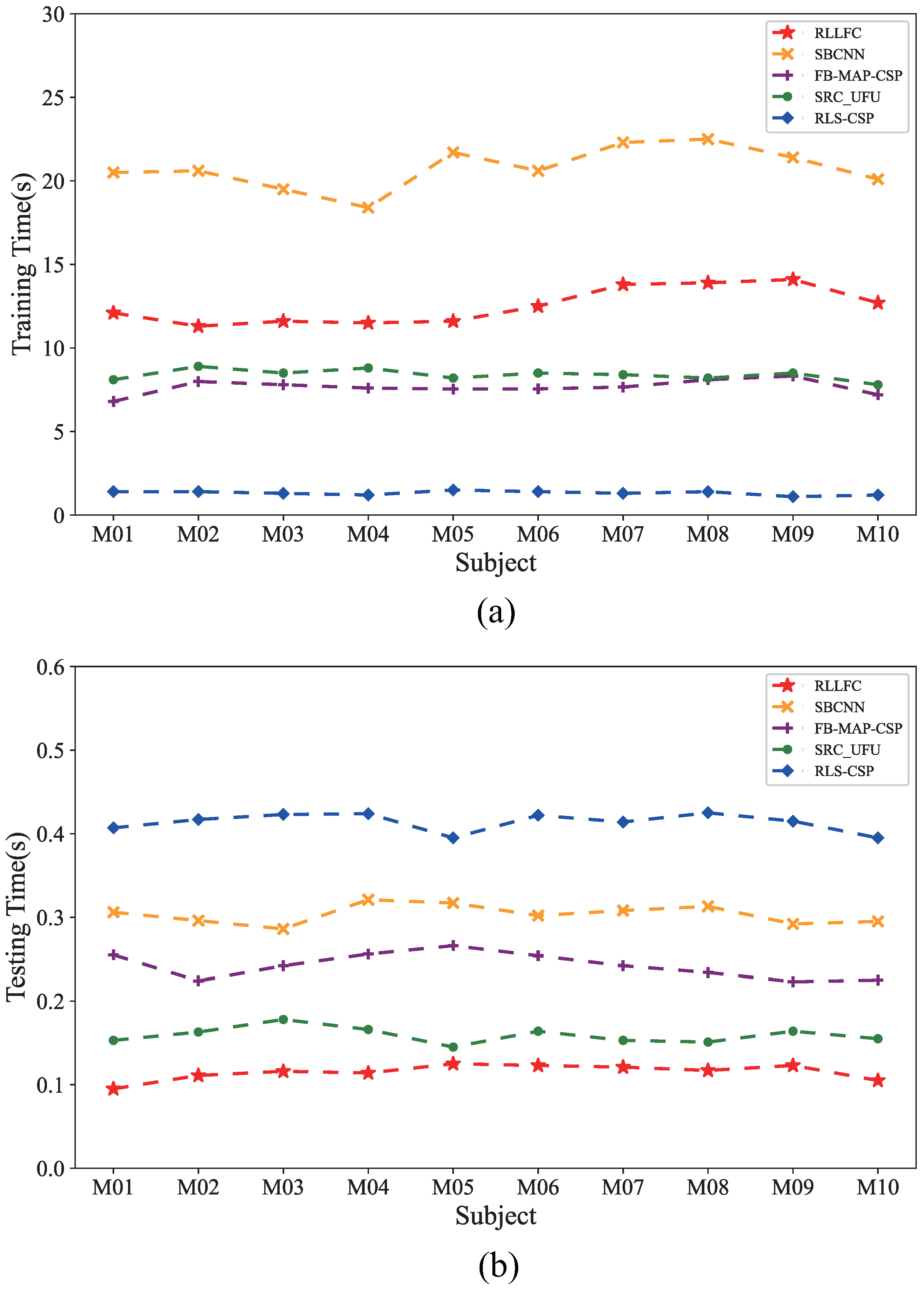
24]. The basis learned from RLLFC can best maintain the geodesic distance between the covariance matrices of EEG samples using a local isometric mapping. Many similar methods have been proposed to decode EEG signals in BCI systems. In [
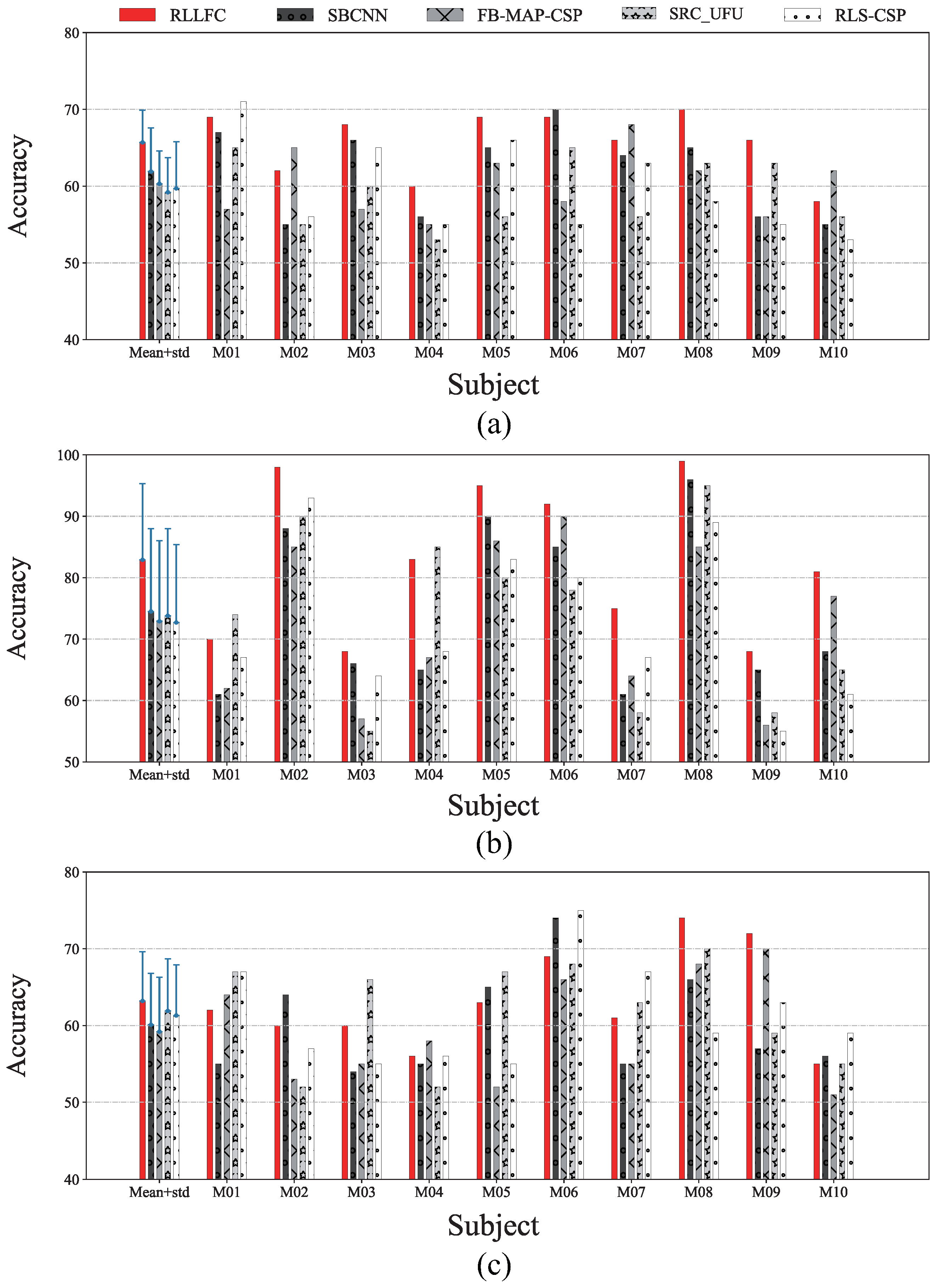
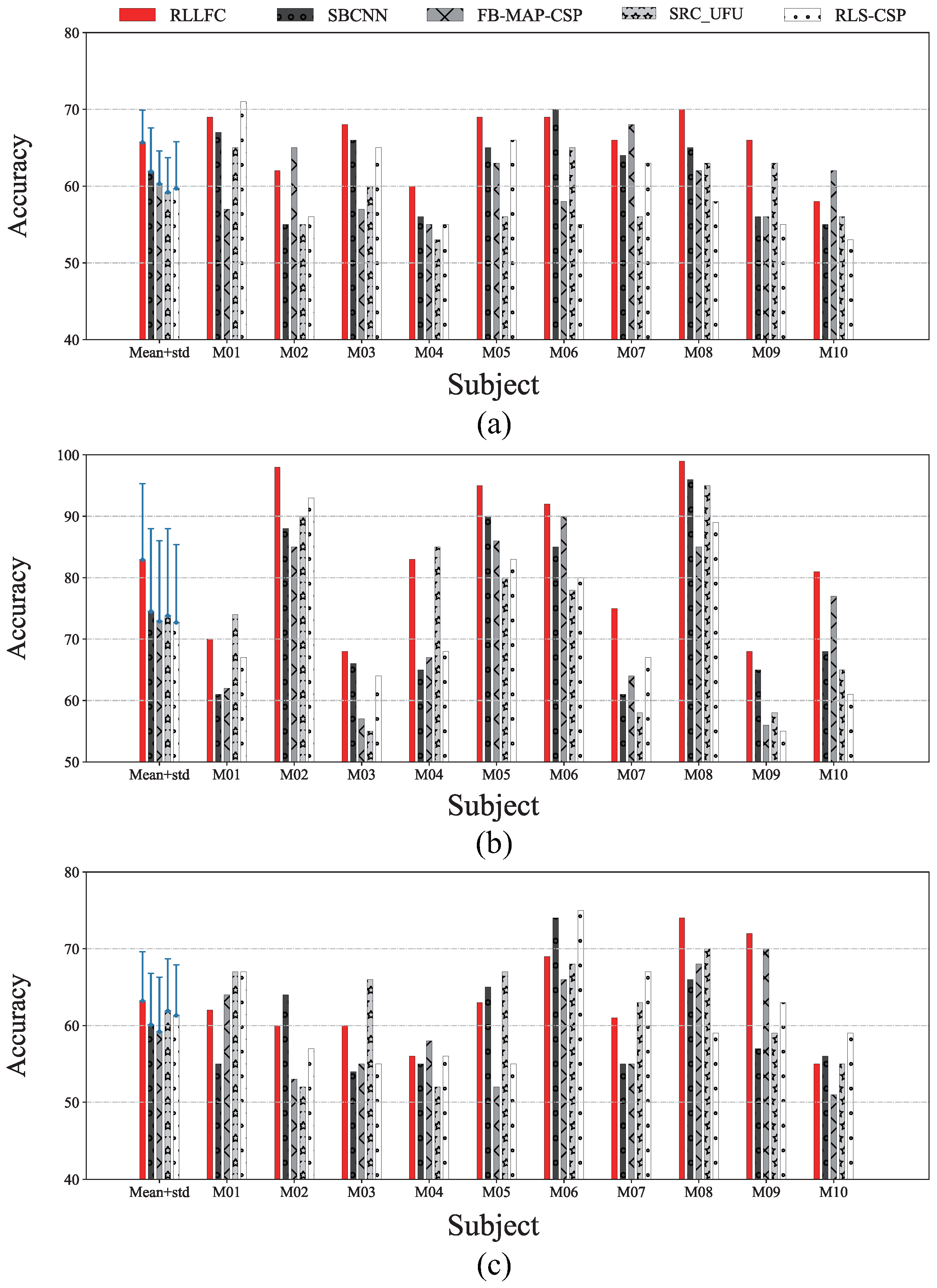
25], a simplified Bayesian convolutional neural network (SBCNN) was proposed to decode the P300 signal in a BCI game by minimizing the Kullback–Leibler divergence between the approximate and real weight distributions. In [
26], an unsupervised adaptive sparse representation-based classification (SRC_UFC) was designed to identify EEG signals by updating the basis set with new testing samples. In [
27], the filter bank maximum a posteriori common spatial pattern (FB-MAP-CSP) was proposed to classify multiple MI tasks by finding the axes along which the two conditions are jointly de-correlated. In [
28], recursive least squares updates of the CSP filter coefficients (RLS-CSP) was designed to recognize MI EEG signals by updating the spatial filter coefficients with new testing samples. Most of these studies have obtained excellent results in BCI applications. However, these methods ignore the fact that the covariance matrix lies on a Riemannian manifold, as well as the structural relationship between samples. The RLLFC algorithm can learn the local geometry and global structure of a Riemannian manifold by preserving the real Riemannian distance. Furthermore, it preserves the structural information of the covariance matrix. The major contributions of this study are threefold:
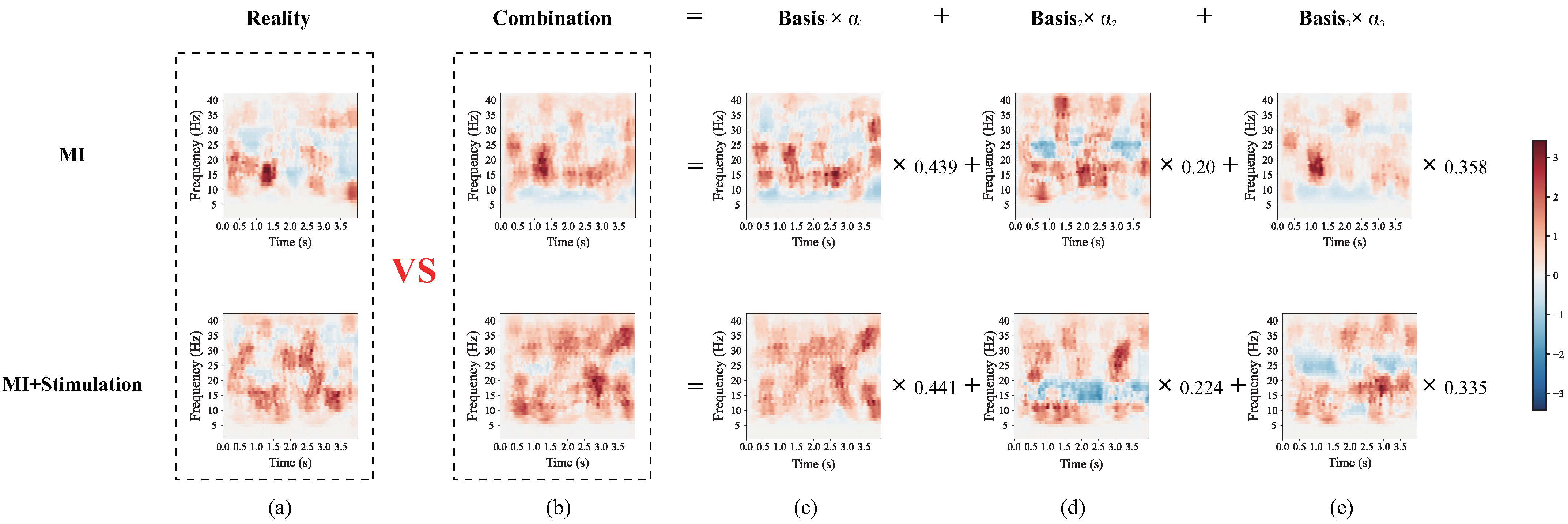
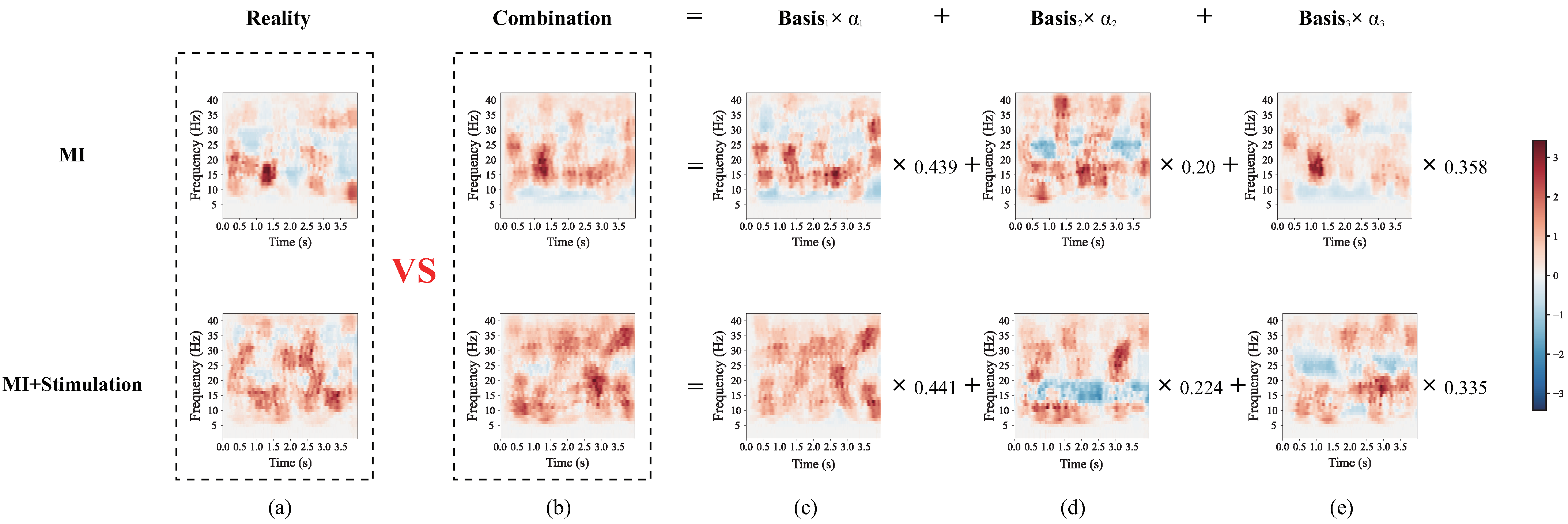
A novel basis learning and representation method called RLLFC is proposed to improve the performance of decoding in MI-BCI systems. Compared with the previous methods, the RLLFC method can preserve the distance between EEG samples and the basis by using the Riemannian geometric distance to measure the EEG samples. Previous methods cannot use the geodesic distance information to learn the basis from EEG samples, owing to the unknown manifold of EEG samples.
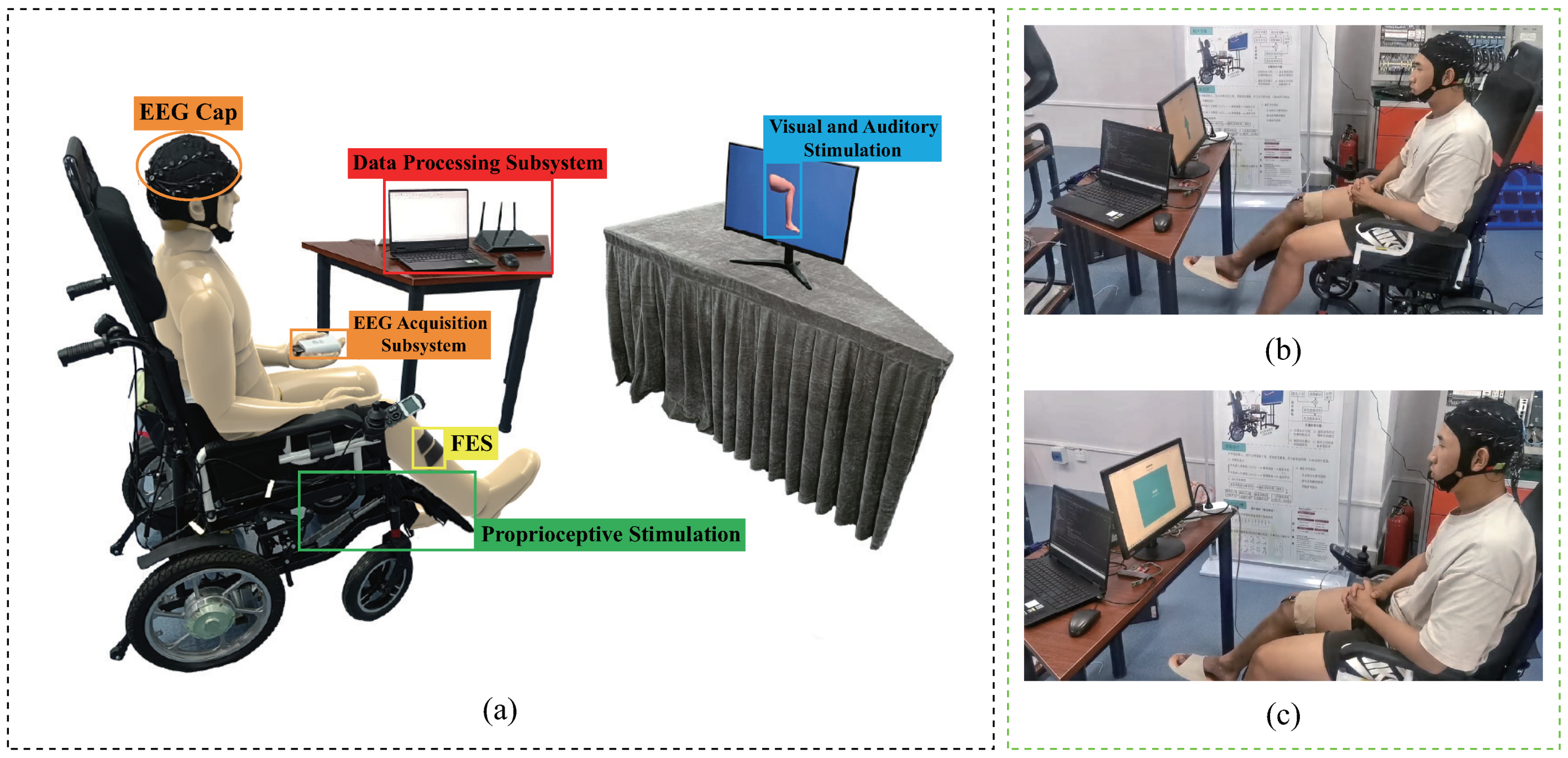
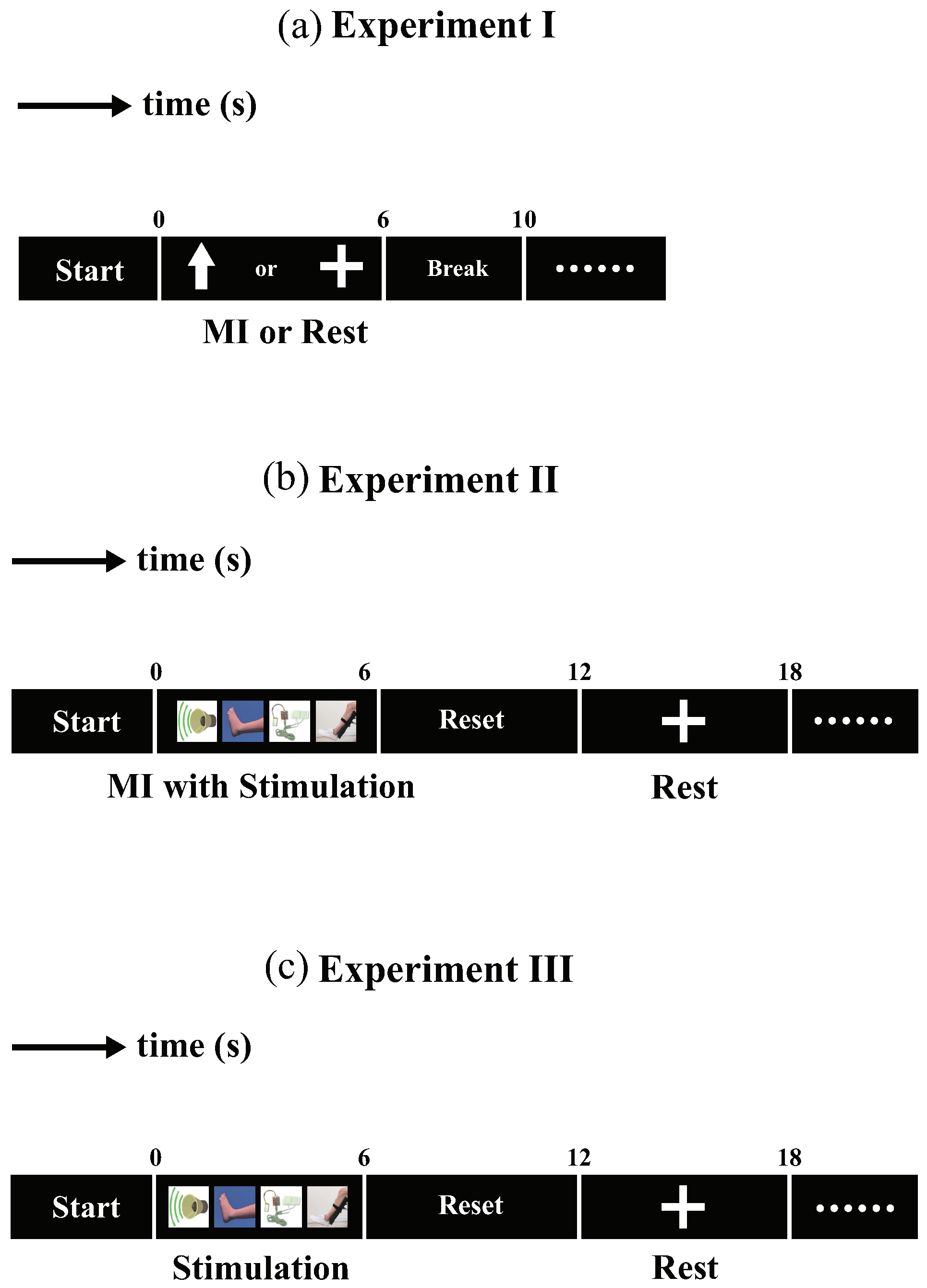
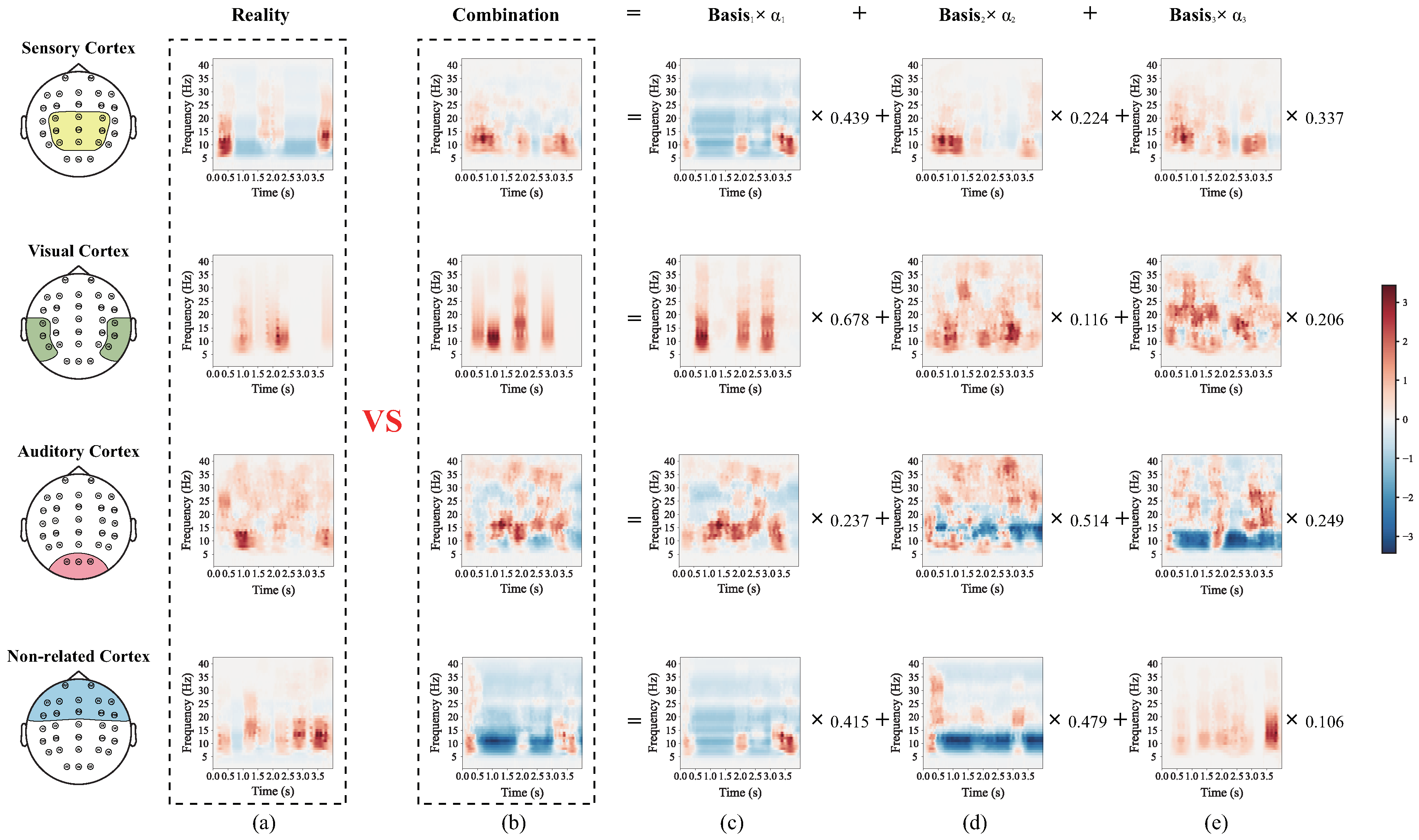
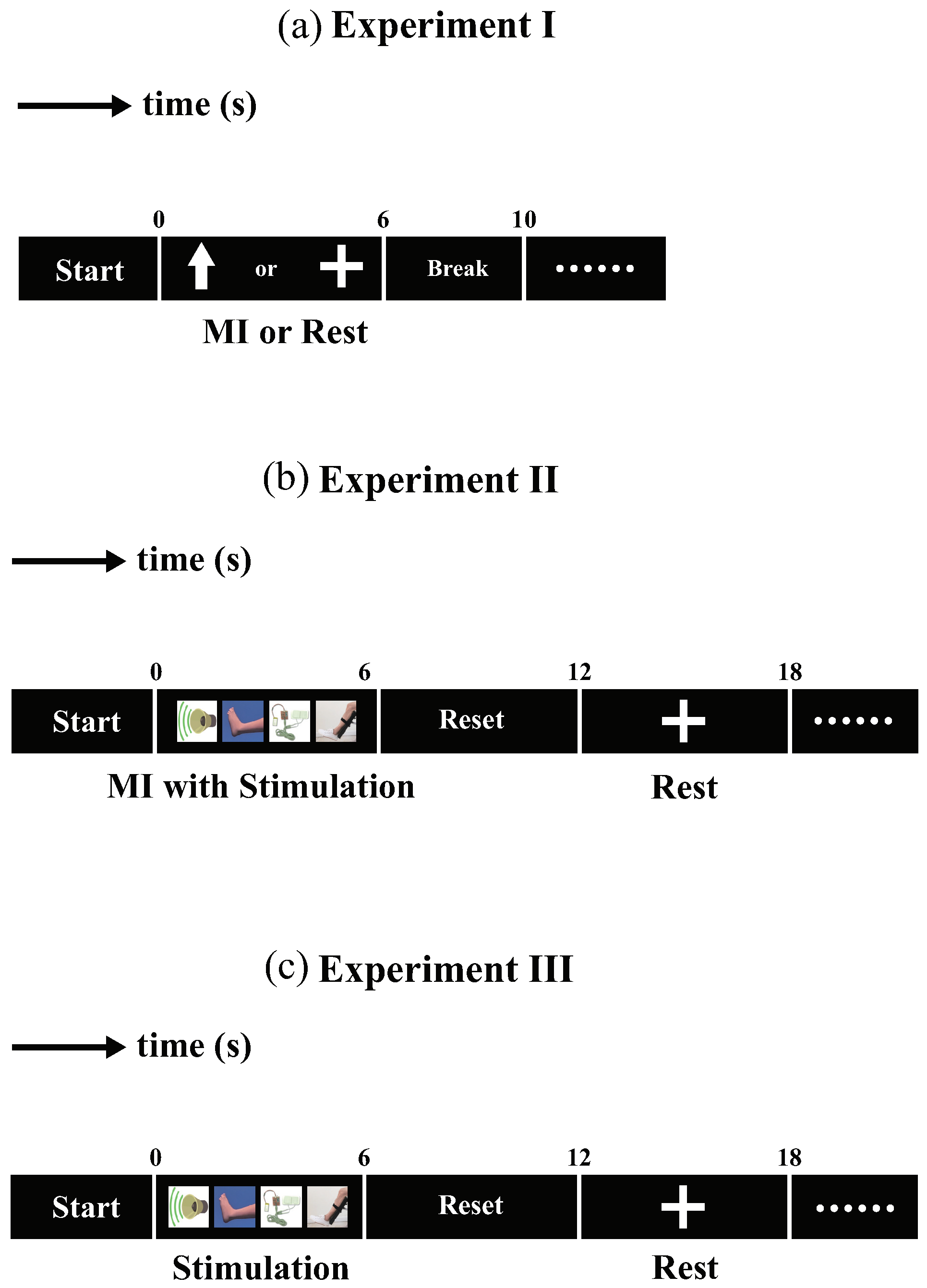
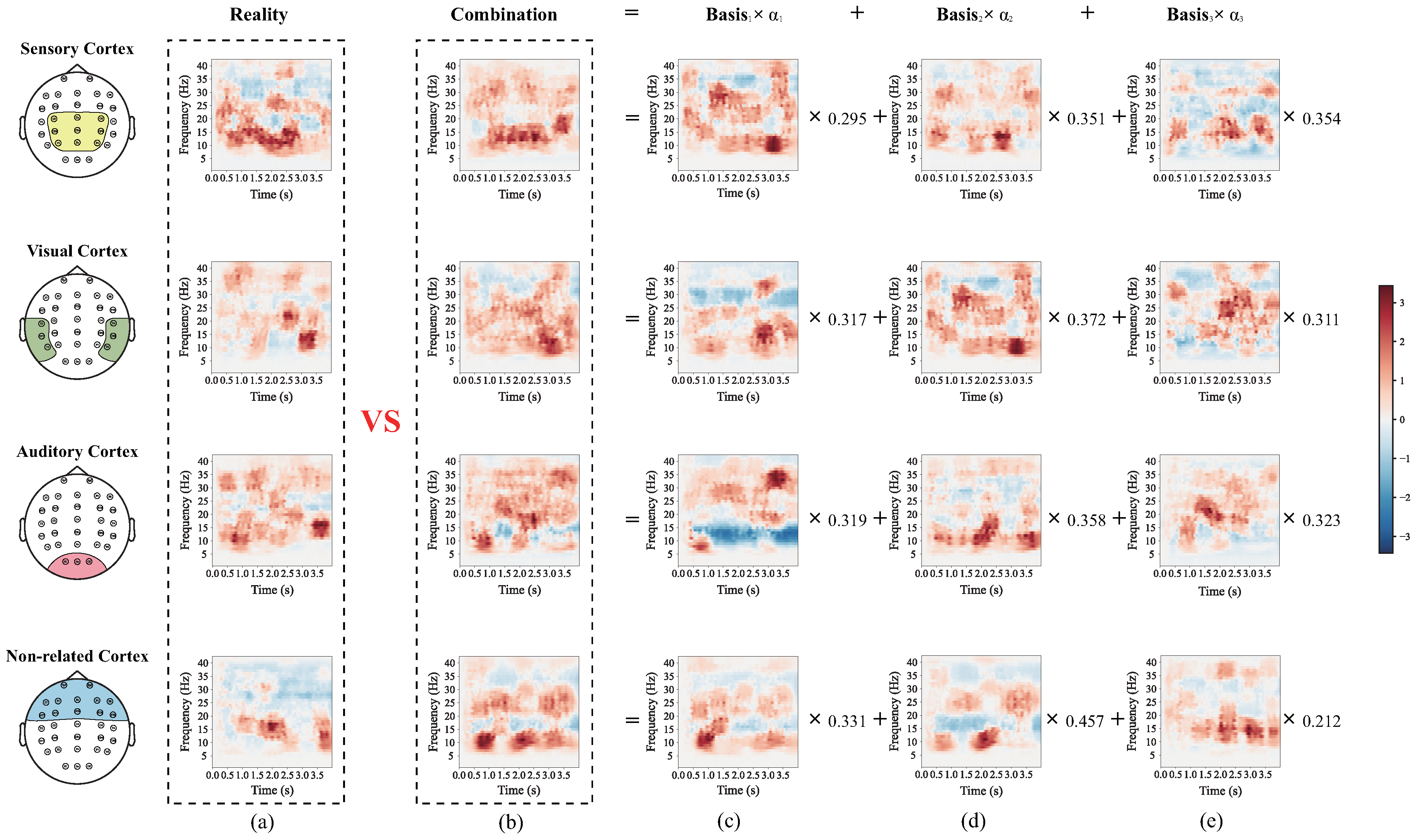
A novel lower-limb MI-BCI system that combines visual stimulation, auditory stimulation, functional electrical stimulation (FES), and proprioceptive stimulation was designed to assist patients in lower-limb rehabilitation training.
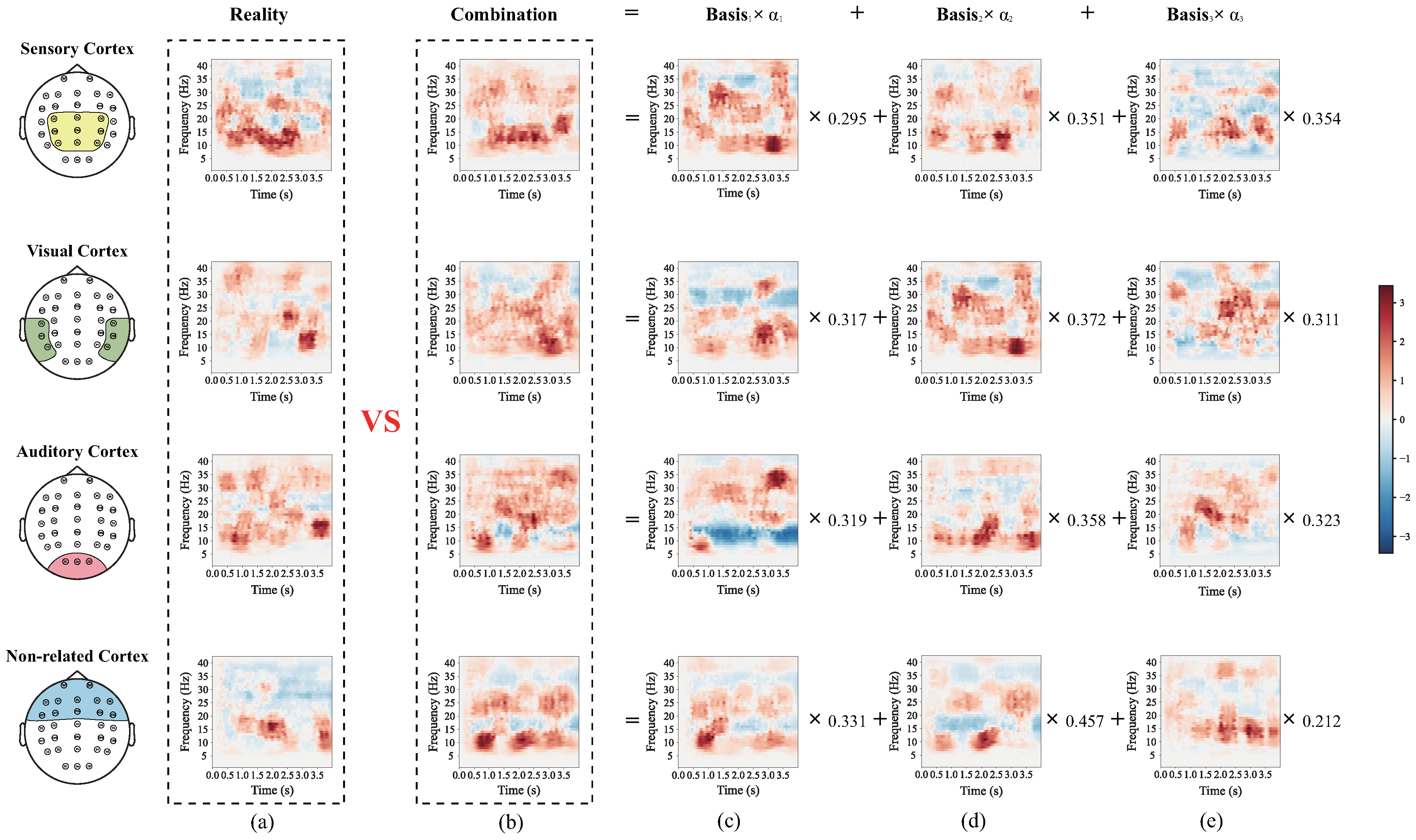
The proposed RLLFC algorithm and BCI system can reveal the cortical activation of lower-limb motor imagery under different visual, auditory, FES, and proprioceptive stimuli, as supported by experimental results. This can provide data support for improving the performance of lower-limb rehabilitation training.
The remainder of this paper is organized as follows. In
Section 2, the experimental setup and EEG decoding process are described.
Section 3 provides the extensive experimental results and analysis to demonstrate the effectiveness of the proposed system. Finally, some conclusions are presented in
Section 4.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}