
Inertial Measurement Unit-Based Real-Time Adaptive Algorithm for Human Walking Pattern and Gait Event Detection


Abstract
:1. Introduction
2. Materials and Methods
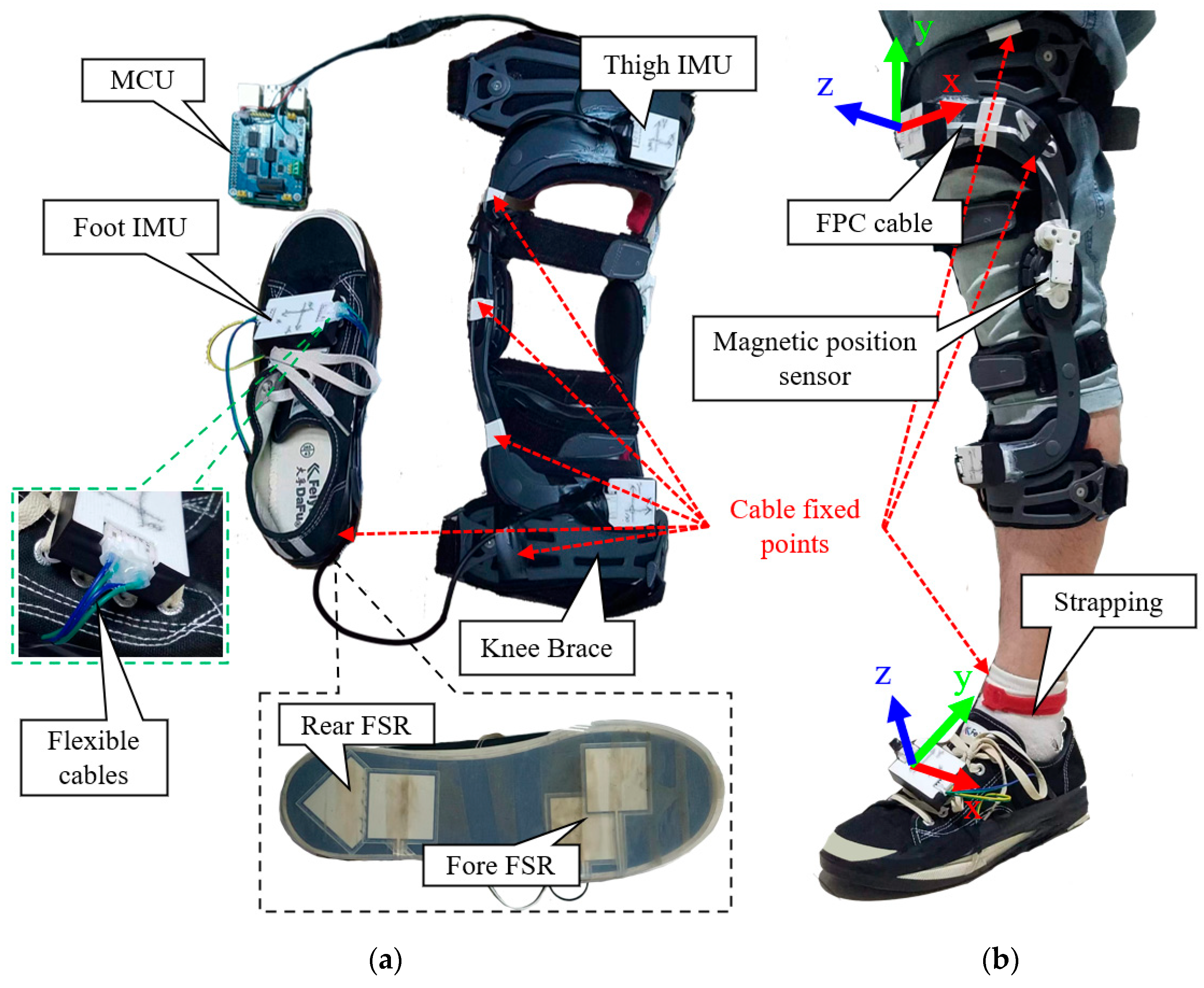
2.1. IMU-Based Hardware Development and Data Pretreatment
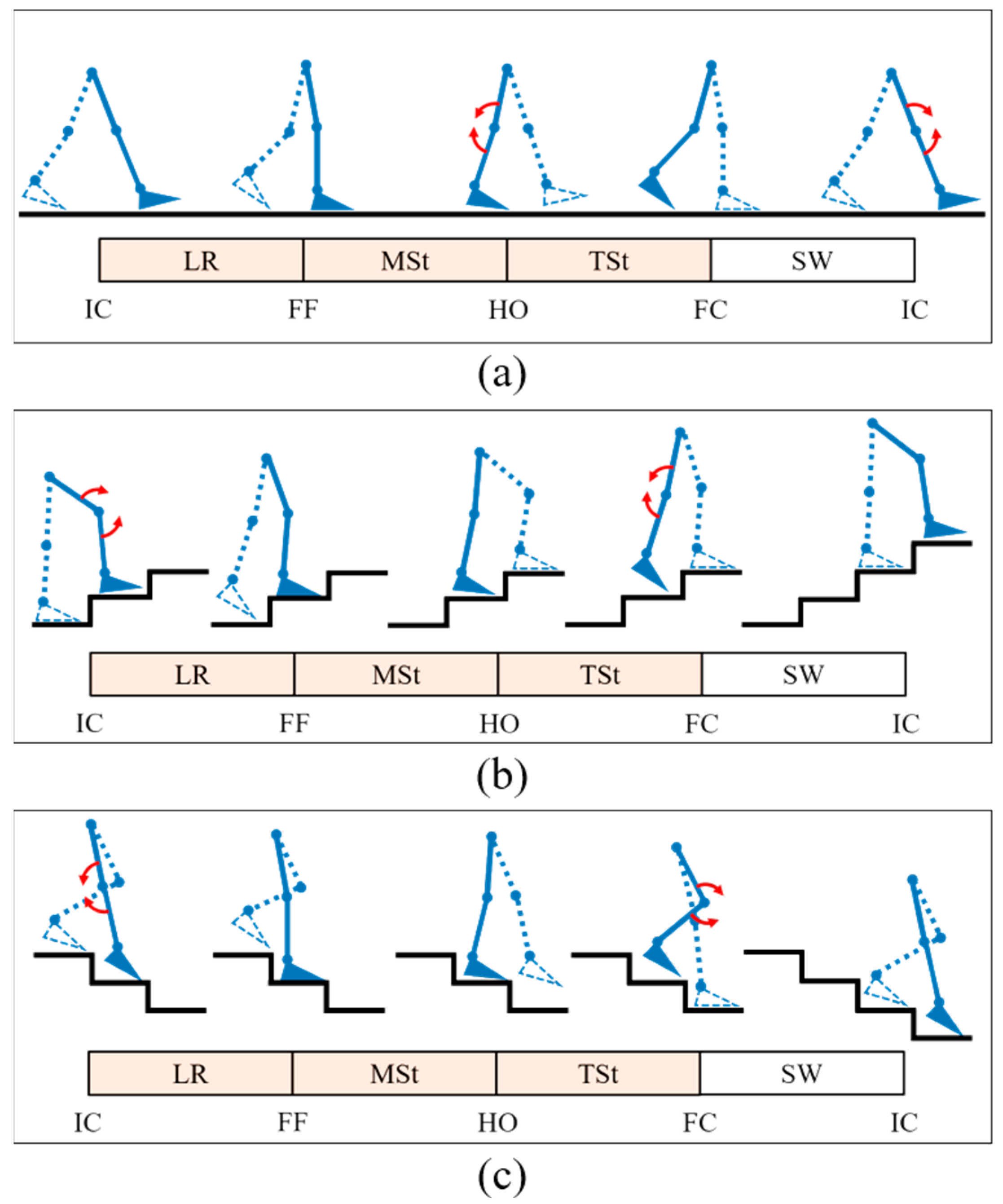
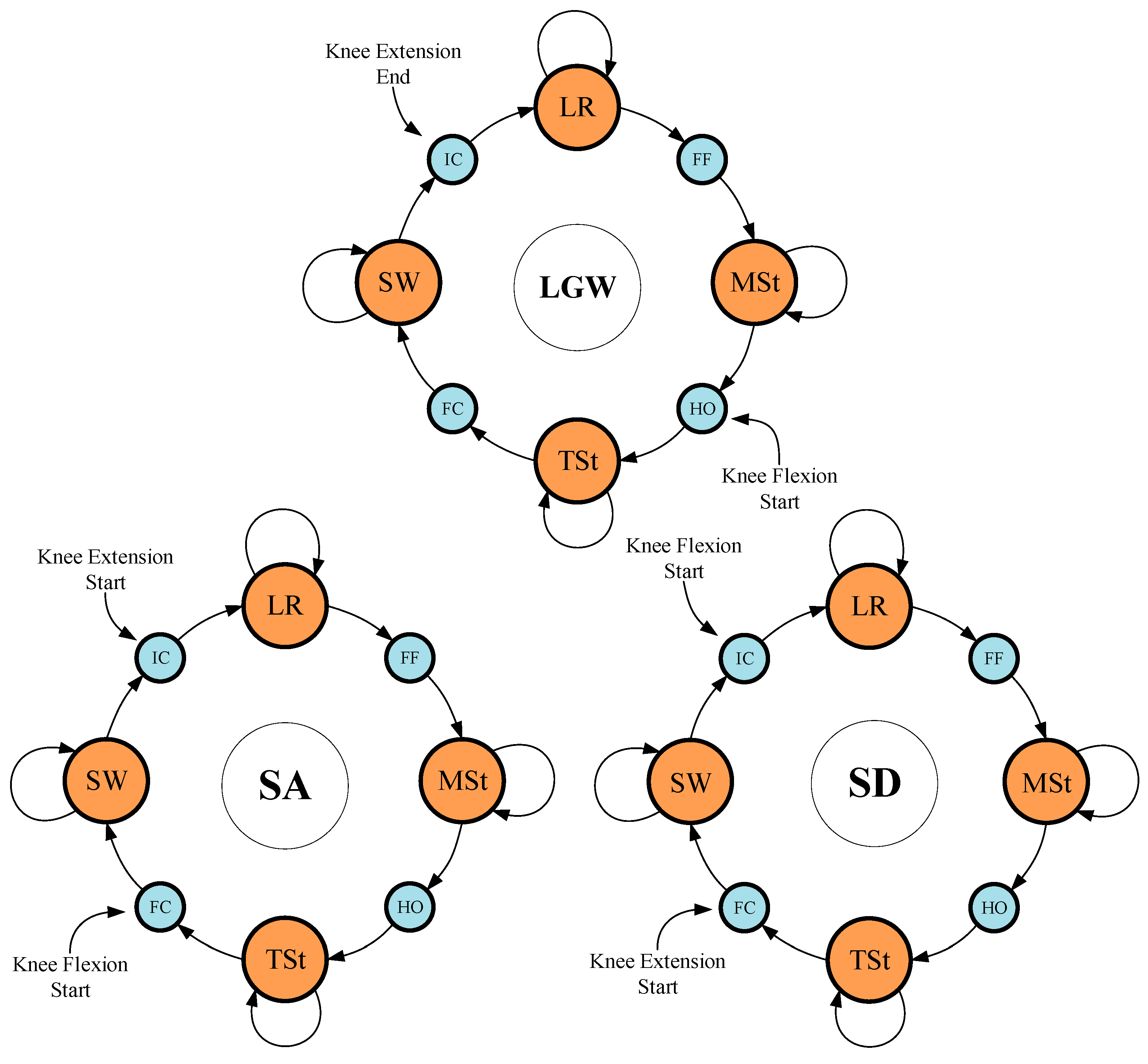
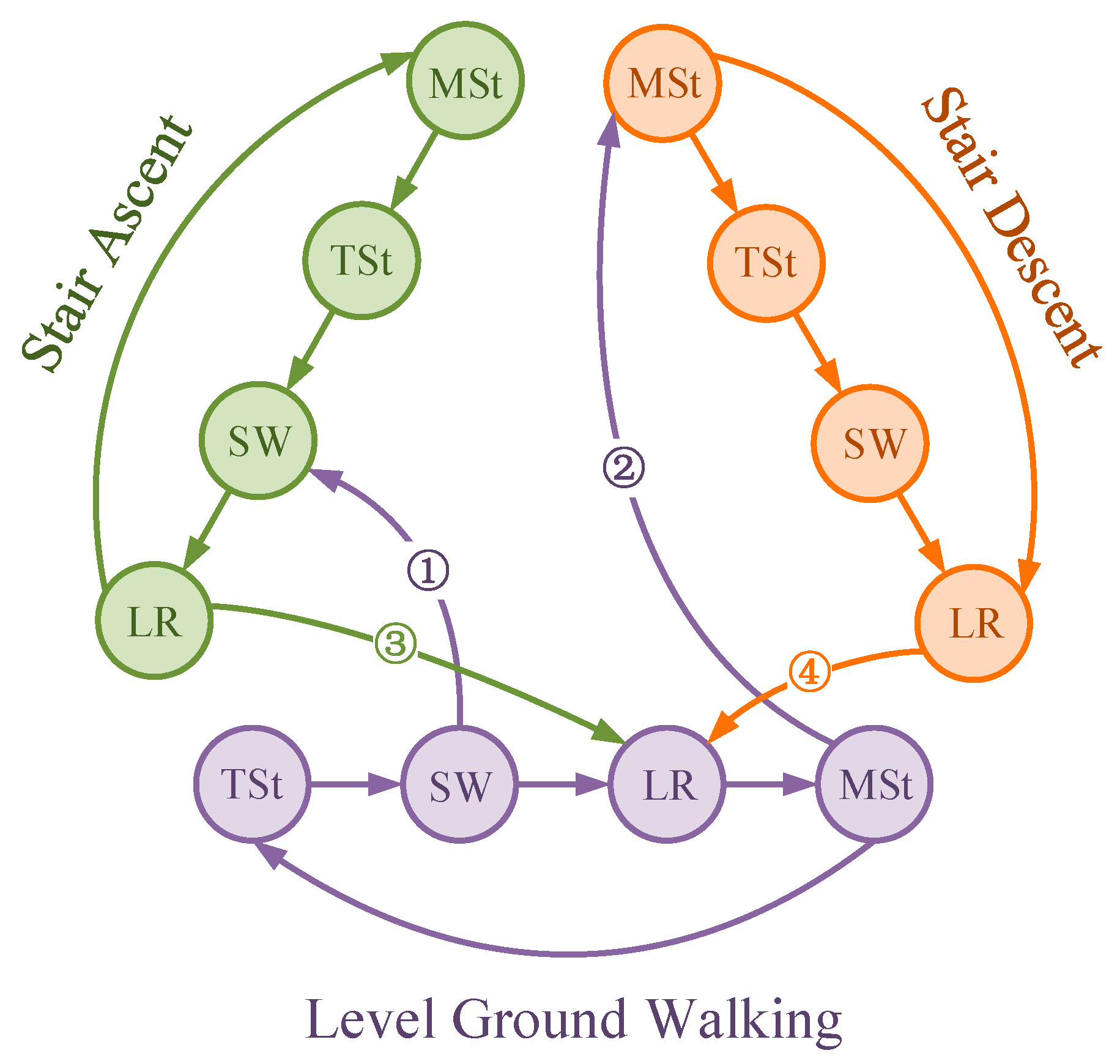
2.2. Gait Models Construction for Three Typical Walking Patterns
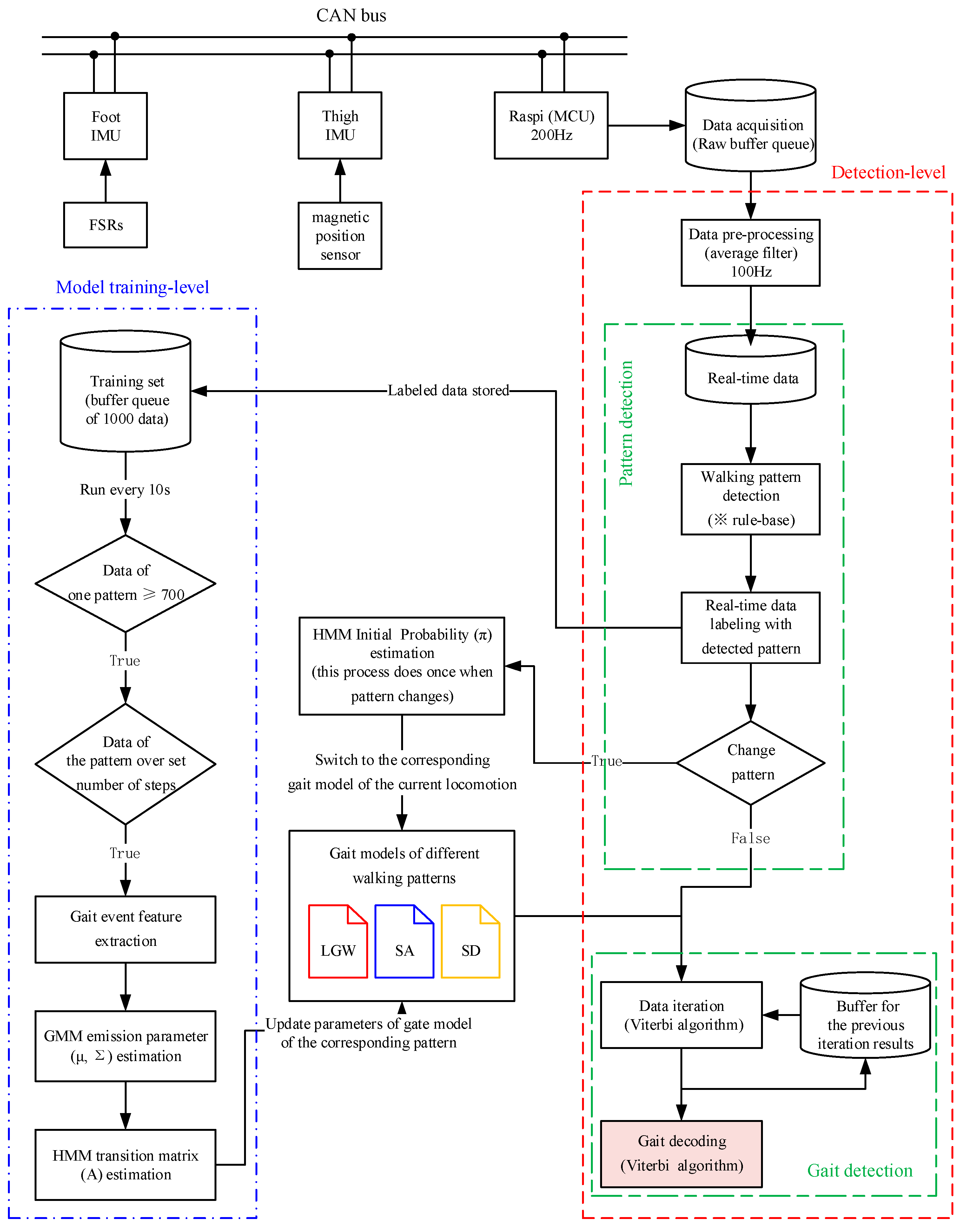
2.3. Adaptive Gait Detection Method
2.3.1. Training-Level Algorithm: Segmentation Rules and Model Training
2.3.2. Detection-Level Algorithm: Walking Pattern Detection and Gait Decoding
2.4. Algorithm Validation Experiments
2.5. Data Post-Processing and Detection Performance Evaluation
3. Results
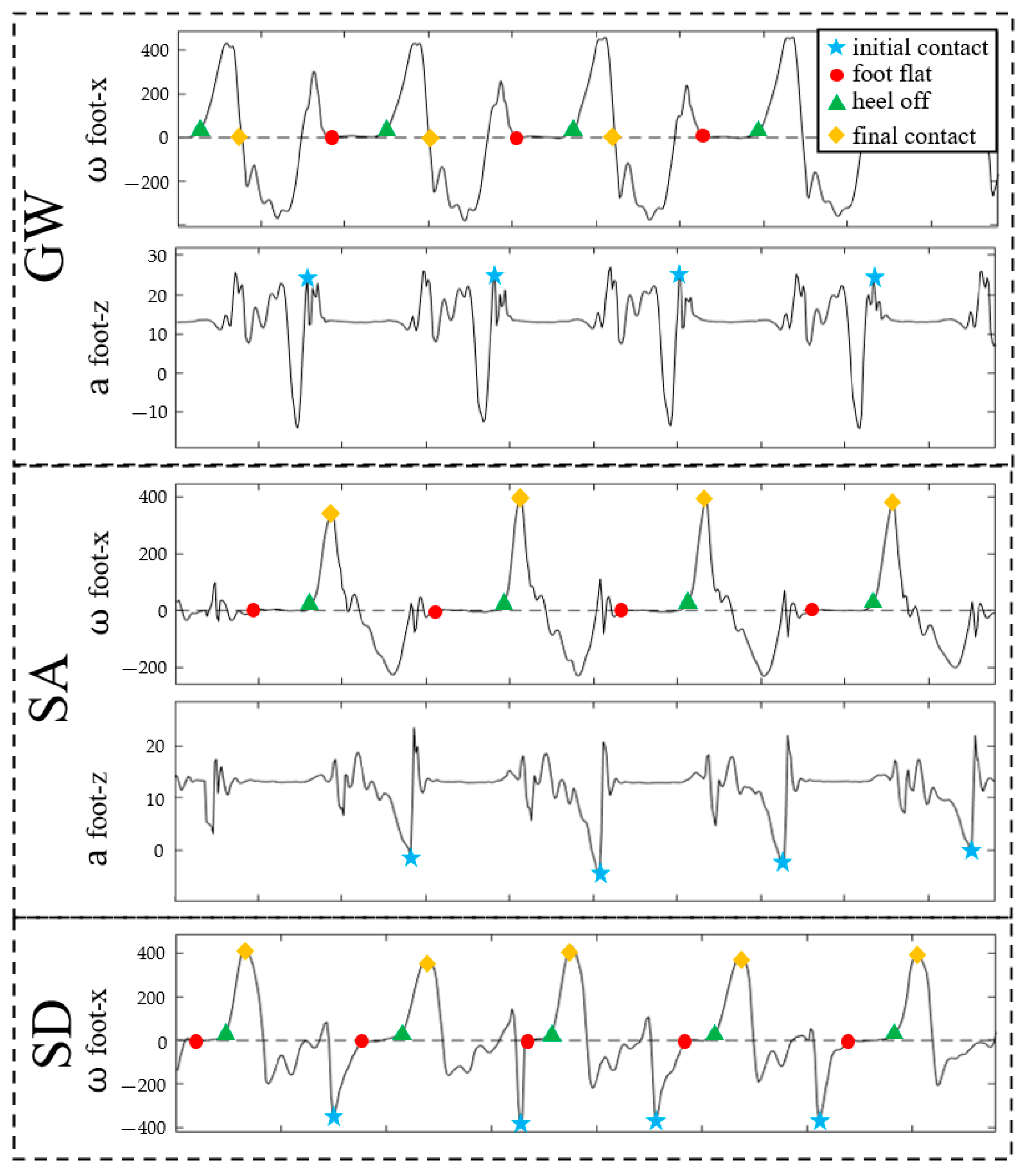
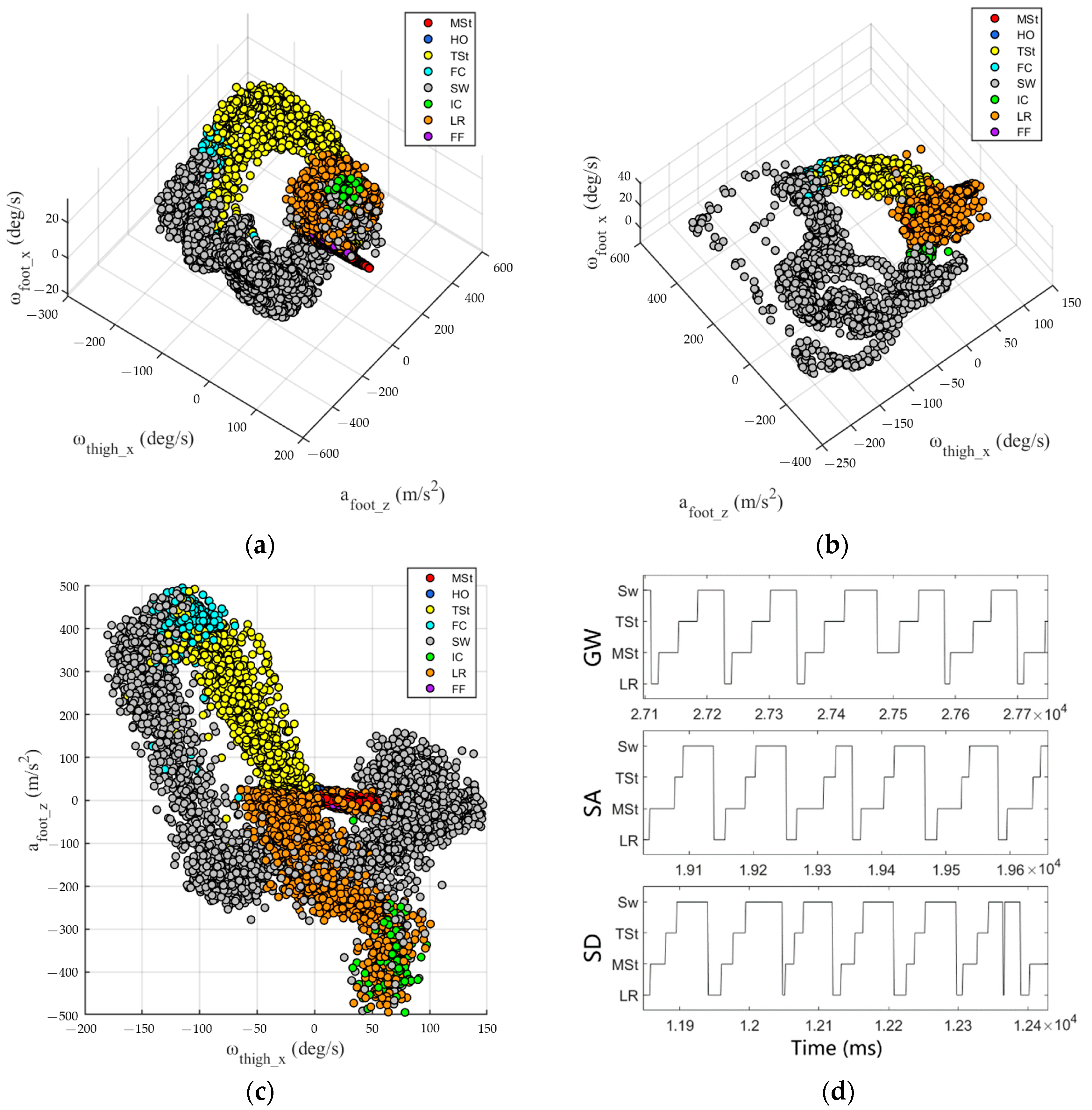
3.1. Parameter Evolution in Different Walking Patterns
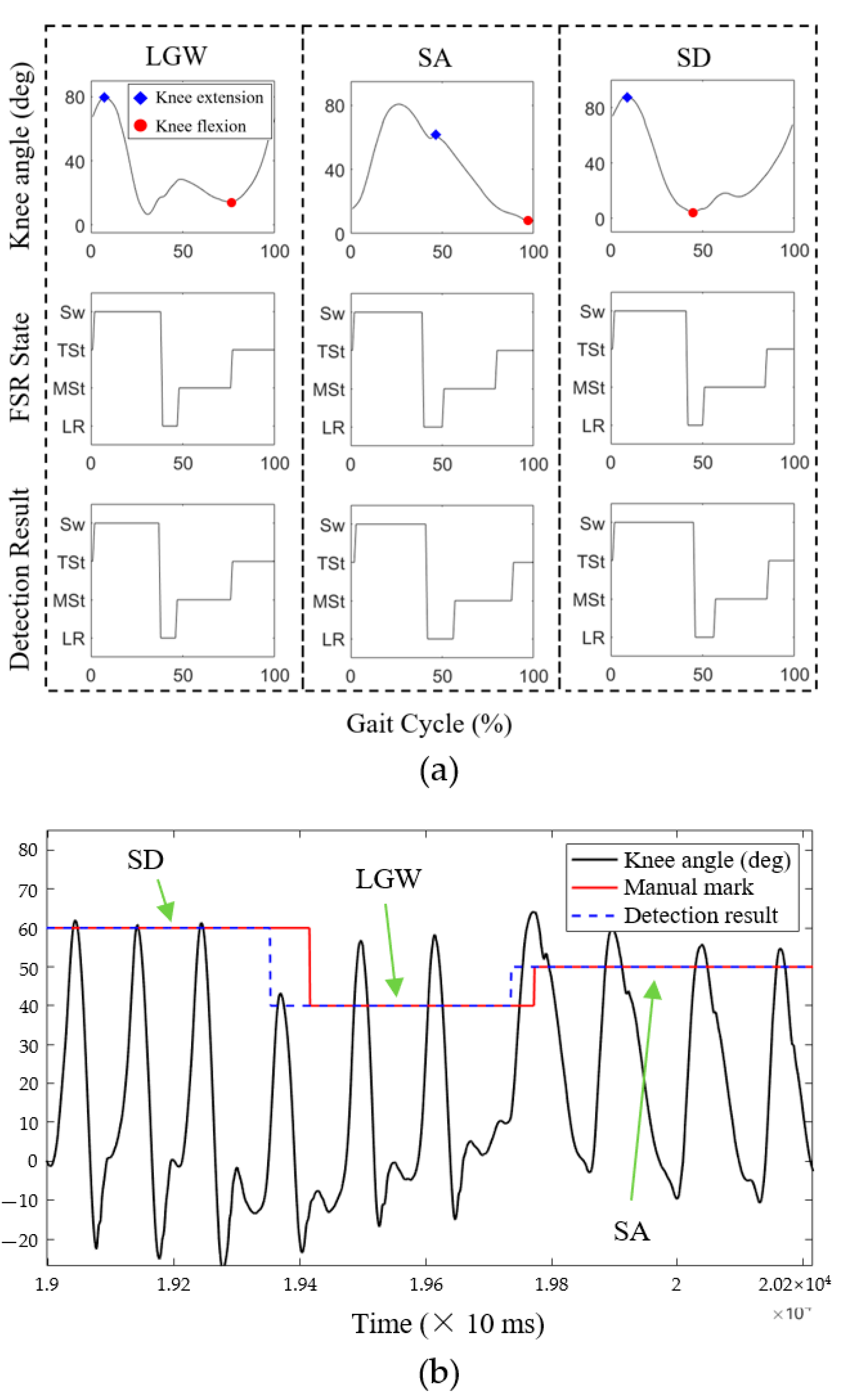
3.2. Performance Indexes of the Detection Method
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Perez-Ibarra, J.C.; Siqueira, A.A.G.; Krebs, H.I. Identification of Gait Events in Healthy Subjects and With Parkinson’s Disease Using Inertial Sensors: An Adaptive Unsupervised Learning Approach. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 2933–2943. [Google Scholar] [CrossRef]
- Roy, A.; Krebs, H.I.; Barton, J.E.; Macko, R.F.; Forrester, L.W. Anklebot-Assisted Locomotor Training after Stroke: A Novel Deficit-Adjusted Control Approach. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 2175–2182. [Google Scholar]
- Wang, X.; Feng, S.; Yan, W.Q. Human Gait Recognition Based on Self-Adaptive Hidden Markov Model. IEEE/ACM Trans. Comput. Biol. Bioinform. 2021, 18, 963–972. [Google Scholar] [CrossRef]
- Tang, Y.; Li, Z.; Tian, H.; Ding, J.; Lin, B. Detecting Toe-Off Events Utilizing a Vision-Based Method. Entropy 2019, 21, 329. [Google Scholar] [CrossRef] [PubMed]
- Ding, Z.; Yang, C.; Wang, Z.; Yin, X.; Jiang, F. Online Adaptive Prediction of Human Motion Intention Based on SEMG. Sensors 2021, 21, 2882. [Google Scholar] [CrossRef]
- Godiyal, A.K.; Singh, U.; Anand, S.; Joshi, D. Analysis of Force Myography Based Walking patterns. Measurement 2019, 140, 497–503. [Google Scholar] [CrossRef]
- Chowdhury, R.; Reaz, M.; Ali, M.; Bakar, A.; Chellappan, K.; Chang, T. Surface Electromyography Signal Processing and Classification Techniques. Sensors 2013, 13, 12431–12466. [Google Scholar] [CrossRef] [PubMed]
- Cho, Y.J.; Lee, C.; Lee, J.H.; Kyung, M.G.; Lee, K.H.; Lee, D.Y. The Difference of In-Shoe Plantar Pressure between Level Walking and Stair Walking in Healthy Males. J. Biomech. 2021, 122, 110446. [Google Scholar] [CrossRef] [PubMed]
- Sahoo, S.; Pratihar, D.K.; Mukhopadhyay, S. A Motion Mode Adaptive Strategy for Real-Time Detection of Gait Events During Negotiating Staircases. IEEE Trans. Instrum. Meas. 2021, 70, 1–8. [Google Scholar] [CrossRef]
- Li, H.; Derrode, S.; Pieczynski, W. An Adaptive and On-Line IMU-Based Motion Activity Classification Method Using a Triplet Markov Model. Neurocomputing 2019, 362, 94–105. [Google Scholar] [CrossRef]
- Allseits, E.; Lučarević, J.; Gailey, R.; Agrawal, V.; Gaunaurd, I.; Bennett, C. The Development and Concurrent Validity of a Real-Time Algorithm for Temporal Gait Analysis Using Inertial Measurement Units. J. Biomech. 2017, 55, 27–33. [Google Scholar] [CrossRef]
- Chinimilli, P.T.; Redkar, S.; Sugar, T. A Two-Dimensional Feature Space-Based Approach for Human Motion Recognition. IEEE Sens. J. 2019, 19, 4271–4282. [Google Scholar] [CrossRef]
- Sahoo, S.; Saboo, M.; Pratihar, D.K. Real-Time Detection of Actual and Early Gait Events During Level-Ground and Ramp Walking. IEEE Sens. J. 2020, 20, 8128–8136. [Google Scholar] [CrossRef]
- Maqbool, H.F.; Husman, M.A.B.; Awad, M.I.; Abouhossein, A.; Iqbal, N.; Tahir, M.; Dehghani-Sanij, A.A. Heuristic Real-Time Detection of Temporal Gait Events for Lower Limb Amputees. IEEE Sens. J. 2019, 19, 3138–3148. [Google Scholar] [CrossRef]
- Xu, D.; Feng, Y.; Mai, J.; Wang, Q. Real-Time On-Board Recognition of Continuous Motion Modes for Amputees With Robotic Transtibial Prostheses. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 2015–2025. [Google Scholar] [CrossRef] [PubMed]
- Zhang, F.; Liu, M.; Huang, H. Effects of Motion Mode Recognition Errors on Volitional Control of Powered Above-Knee Prostheses. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 64–72. [Google Scholar] [CrossRef]
- Wu, X.; Zhao, L.; Guo, S.; Zhang, L. Pedestrian Inertial Navigation Based on CNN-SVM Gait Recognition Algorithm. J. Phys. Conf. Ser. 2021, 1903, 012043. [Google Scholar] [CrossRef]
- Chen, C.; Du, Z.; He, L.; Shi, Y.; Wang, J.; Dong, W. A Novel Gait Pattern Recognition Method Based on LSTM-CNN for Lower Limb Exoskeleton. J. Bionic Eng. 2021, 18, 1059–1072. [Google Scholar] [CrossRef]
- Zhao, H.; Wang, Z.; Qiu, S.; Wang, J.; Xu, F.; Wang, Z.; Shen, Y. Adaptive Gait Detection Based on Foot-Mounted Inertial Sensors and Multi-Sensor Fusion. Inf. Fusion. 2019, 52, 157–166. [Google Scholar] [CrossRef]
- Barth, J.; Oberndorfer, C.; Pasluosta, C.; Schülein, S.; Gassner, H.; Reinfelder, S.; Kugler, P.; Schuldhaus, D.; Winkler, J.; Klucken, J.; et al. Stride Segmentation during Free Walk Movements Using Multi-Dimensional Subsequence Dynamic Time Warping on Inertial Sensor Data. Sensors 2015, 15, 6419–6440. [Google Scholar] [CrossRef]
- Wang, L.; Sun, Y.; Li, Q.; Liu, T.; Yi, J. Two Shank-Mounted IMUs-Based Gait Analysis and Classification for Neurological Disease Patients. IEEE Robot. Autom. Lett. 2020, 5, 1970–1976. [Google Scholar] [CrossRef]
- Sivarathinabala, M.; Abirami, S.; Baskaran, R. Abnormal Gait Recognition Using Exemplar Based Algorithm in Healthcare Applications. Int. J. Commun. Syst. 2020, 33, e4348. [Google Scholar] [CrossRef]
- Pérez-Ibarra, J.C.; Siqueira, A.A.G.; Krebs, H.I. Identification of Gait Events in Healthy and Parkinson’s Disease Subjects Using Inertial Sensors: A Supervised Learning Approach. IEEE Sens. J. 2020, 20, 14984–14993. [Google Scholar] [CrossRef]
- Rueterbories, J.; Spaich, E.G.; Larsen, B.; Andersen, O.K. Methods for Gait event detection and Analysis in Ambulatory Systems. Med. Eng. Phys. 2010, 32, 545–552. [Google Scholar] [CrossRef] [PubMed]
- Sánchez Manchola, M.D.S.; Pinto Bernal, M.J.P.; Munera, M.; Cifuentes, C.A. Gait Phase Detection for Lower-Limb Exoskeletons Using Foot Motion Data from a Single Inertial Measurement Unit in Hemiparetic Individuals. Sensors 2019, 19, 2988. [Google Scholar] [CrossRef]
- Figueiredo, J.; Felix, P.; Costa, L.; Moreno, J.C.; Santos, C.P. Gait event detection in Controlled and Real-Life Situations: Repeated Measures From Healthy Subjects. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 1945–1956. [Google Scholar] [CrossRef]
- Xu, D.; Wang, Q. On-Board Training Strategy for IMU-Based Real-Time Motion Recognition of Transtibial Amputees With Robotic Prostheses. Front. Neurorobot. 2020, 14, 47. [Google Scholar] [CrossRef]
- Mannini, A.; Genovese, V.; Sabatin, A.M. Online Decoding of Hidden Markov Models for Gait event detection Using Foot-Mounted Gyroscopes. IEEE J. Biomed. Health Inform. 2014, 18, 1122–1130. [Google Scholar] [CrossRef]
- Zhou, H.; Ji, N.; Samuel, O.; Cao, Y.; Zhao, Z.; Chen, S.; Li, G. Towards Real-Time Detection of Gait Events on Different Terrains Using Time-Frequency Analysis and Peak Heuristics Algorithm. Sensors 2016, 16, 1634. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pattern Switch Rule | Remarks | |
|---|---|---|
| Level-ground Walking |
| switch to swing of SA |
| switch to mid-stance of SD | |
| Stair Ascent |
| switch to initial contact of LGW |
| Stair Descent |
| switch to load response of LGW |
| P | R | F1 | ||
|---|---|---|---|---|
| LGW | initial contact | 0.96 | 0.95 | 0.95 |
| foot flat | 0.97 | 0.93 | 0.95 | |
| heel-off | 0.95 | 0.95 | 0.95 | |
| final contact | 0.93 | 0.93 | 0.93 | |
| SA | initial contact | 0.95 | 0.95 | 0.95 |
| foot flat | 0.92 | 0.92 | 0.92 | |
| heel-off | 0.91 | 0.90 | 0.90 | |
| final contact | 0.95 | 0.95 | 0.95 | |
| SD | initial contact | 0.86 | 0.86 | 0.86 |
| foot flat | 0.93 | 0.93 | 0.93 | |
| heel-off | 0.91 | 0.91 | 0.91 | |
| final contact | 0.94 | 0.94 | 0.94 |
| Initial Contact | Foot Flat | Heel-Off | Final Contact | |
|---|---|---|---|---|
| LGW | 13.5 ± 30.2 | 14.9 ± 33.8 | 6.9 ± 37.8 | 59.9 ± 37.9 |
| SA | −27.1 ± 33.9 | 47.5 ± 37.1 | −40.2 ± 36.9 | −28.4 ± 26.7 |
| SD | 15.6 ± 17.3 | 51 ± 32.4 | −9.3 ± 39.9 | 27.1 ± 39.2 |
| Knee Flexion | Knee Extension | |
|---|---|---|
| LGW | 16.9 ± 58.0 with HO | 76.9 ± 37.1 with IC |
| SA | 73.5 ± 44.9 with FC | −29.8 ± 35.7 with IC |
| SD | 137.5 ± 27.5 with IC | −103.3 ± 77.4 with FC |
| Rule-Based [9] | Rule-Based [29] | HMM-Based [26] | This Study | ||
|---|---|---|---|---|---|
| LGW | initial contact | 7.95 ± 25.7 | 137.4 ± 41.2 | 55.2 ± 10.1 | 13.5 ± 30.2 |
| foot flat | 13.45 ± 68.9 | - | 46.1 ± 8.7 | 14.9 ± 33.8 | |
| heel-off | 36.8 ± 63.2 | - | 43.7 ± 6.7 | 6.9 ± 37.8 | |
| final contact | −11.47 ± 48.5 | 115.8 ± 139.7 | 17.3 ± 9.3 | 59.9 ± 37.9 | |
| SA | initial contact | −19.66 ± 92.7 | 173.9 ± 35.6 | 44.9 ± 5.2 | −27.1 ± 33.9 |
| foot flat | 4.7 ± 31.5 | - | 58.9 ± 6.7 | 47.5 ± 37.1 | |
| heel-off | - | - | 67.4 ± 8.9 | −40.2 ± 36.9 | |
| final contact | 12.92 ± 35.3 | 69.7 ± 123.1 | 24.9 ± 2.6 | −28.4 ± 26.7 | |
| SD | initial contact | −47.8 ± 49.7 | 119.5 ± 36.6 | - | 15.6 ± 17.3 |
| foot flat | 24.6 ± 52.9 | - | - | 51 ± 32.4 | |
| heel-off | - | - | - | −9.3 ± 39.9 | |
| final contact | −24.57 ± 46.7 | 26.4 ± 88.2 | - | 27.1 ± 39.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Y.; Zhu, J.; Chen, W.; Ma, X. Inertial Measurement Unit-Based Real-Time Adaptive Algorithm for Human Walking Pattern and Gait Event Detection. Electronics 2023, 12, 4319. https://doi.org/10.3390/electronics12204319
Lu Y, Zhu J, Chen W, Ma X. Inertial Measurement Unit-Based Real-Time Adaptive Algorithm for Human Walking Pattern and Gait Event Detection. Electronics. 2023; 12(20):4319. https://doi.org/10.3390/electronics12204319
Chicago/Turabian StyleLu, Yinxiao, Jun Zhu, Wenming Chen, and Xin Ma. 2023. "Inertial Measurement Unit-Based Real-Time Adaptive Algorithm for Human Walking Pattern and Gait Event Detection" Electronics 12, no. 20: 4319. https://doi.org/10.3390/electronics12204319
APA StyleLu, Y., Zhu, J., Chen, W., & Ma, X. (2023). Inertial Measurement Unit-Based Real-Time Adaptive Algorithm for Human Walking Pattern and Gait Event Detection. Electronics, 12(20), 4319. https://doi.org/10.3390/electronics12204319