
Research on Mixed Matrix Estimation Algorithm Based on Improved Sparse Representation Model in Underdetermined Blind Source Separation System


Abstract
1. Introduction
- Finding the sparse representation model for the time domain mixed signal
- Clustering the sparse representation model
- It is easy to be interfered with by outliers, resulting in the low estimation accuracy of mixed matrix.
- The amount of the calculations is too large to be applied in UBSS.
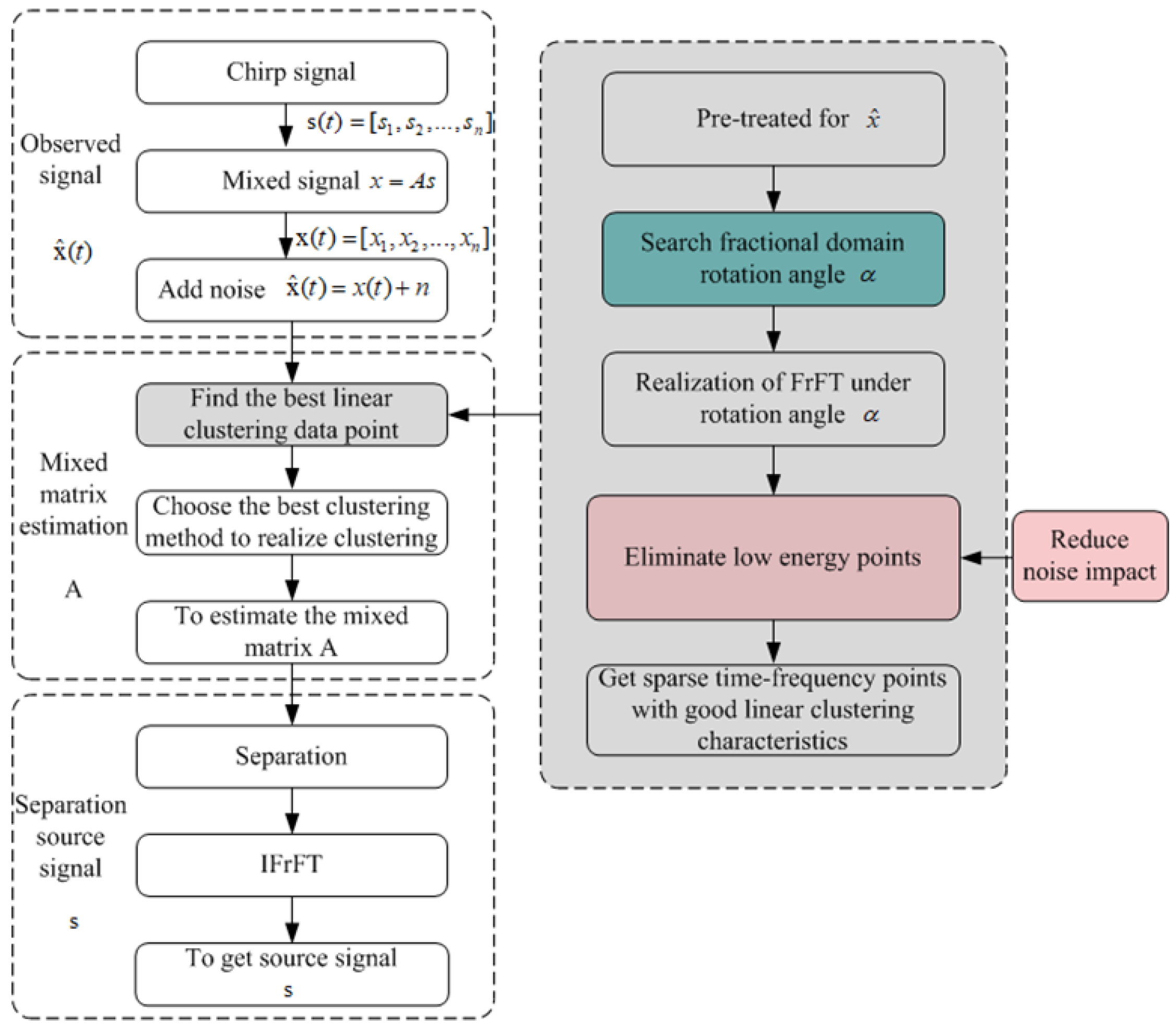
2. Proposed Method
2.1. Theory of Fractional Fourier Transform (FrFT)
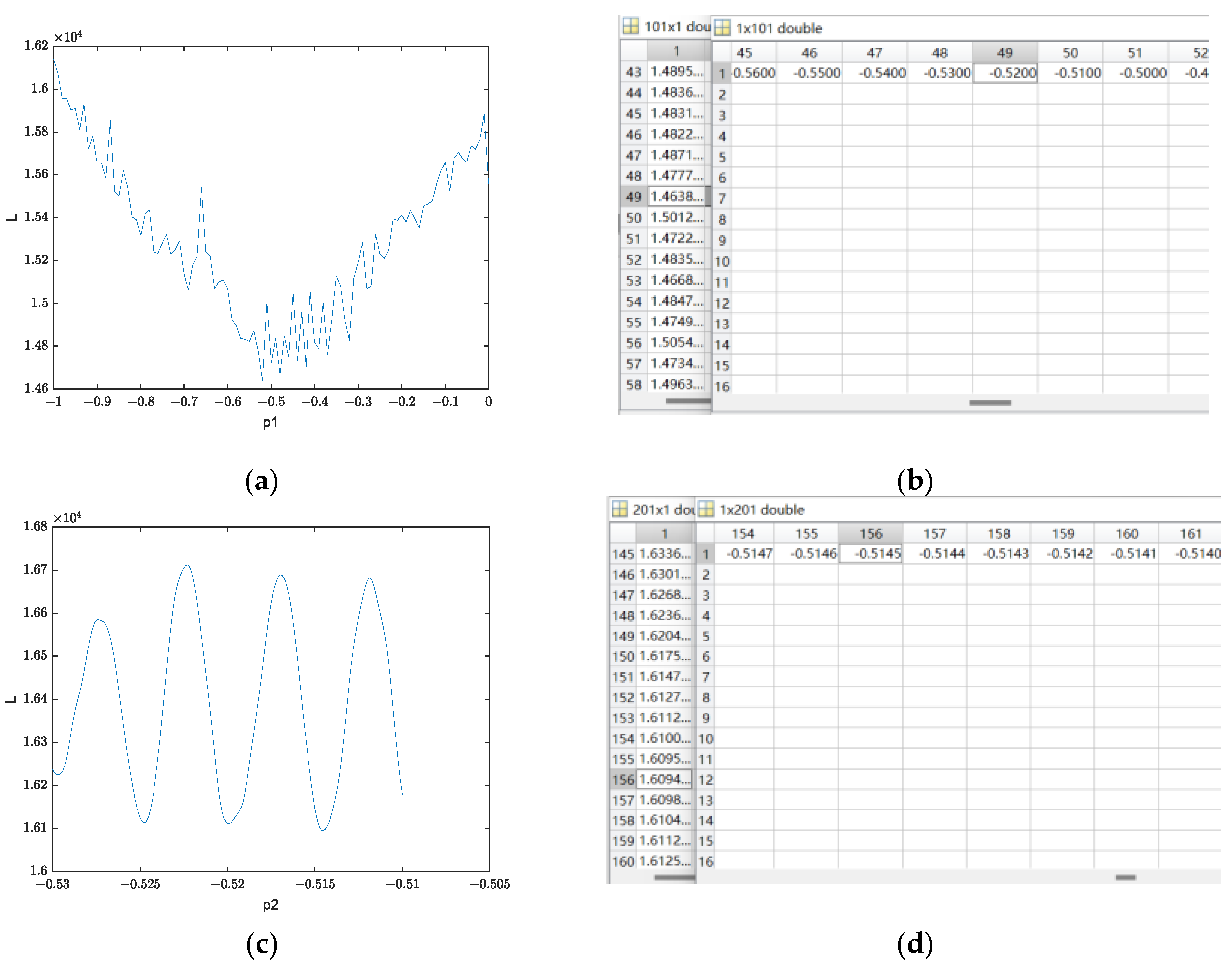
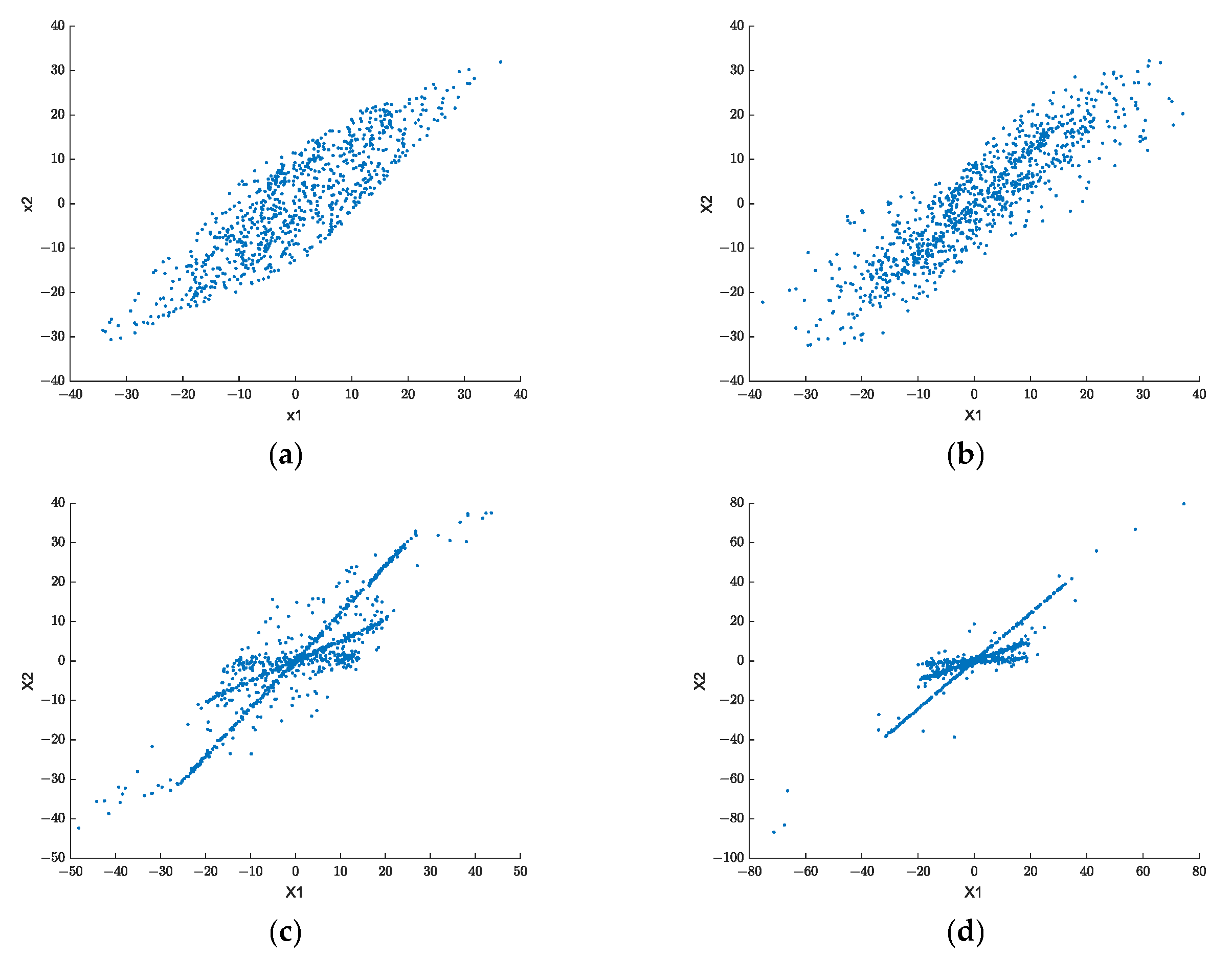
2.2. Transformation Order Determination to Obtain Sparse Representation Model
2.3. Clustering for Mixing Matrix Estimation
| Algorithm 1: estimate mixing matrix algorithm steps |
Input:
|
Process: estimate the mixing matrix A
|
| Output: obtain the estimated mixing matrix A |
3. Simulation Experiment and Result Analysis
- Noise suppression in the fractional domain
- Optimal transformation order selection
- Comparison of mixed matrix estimation performance
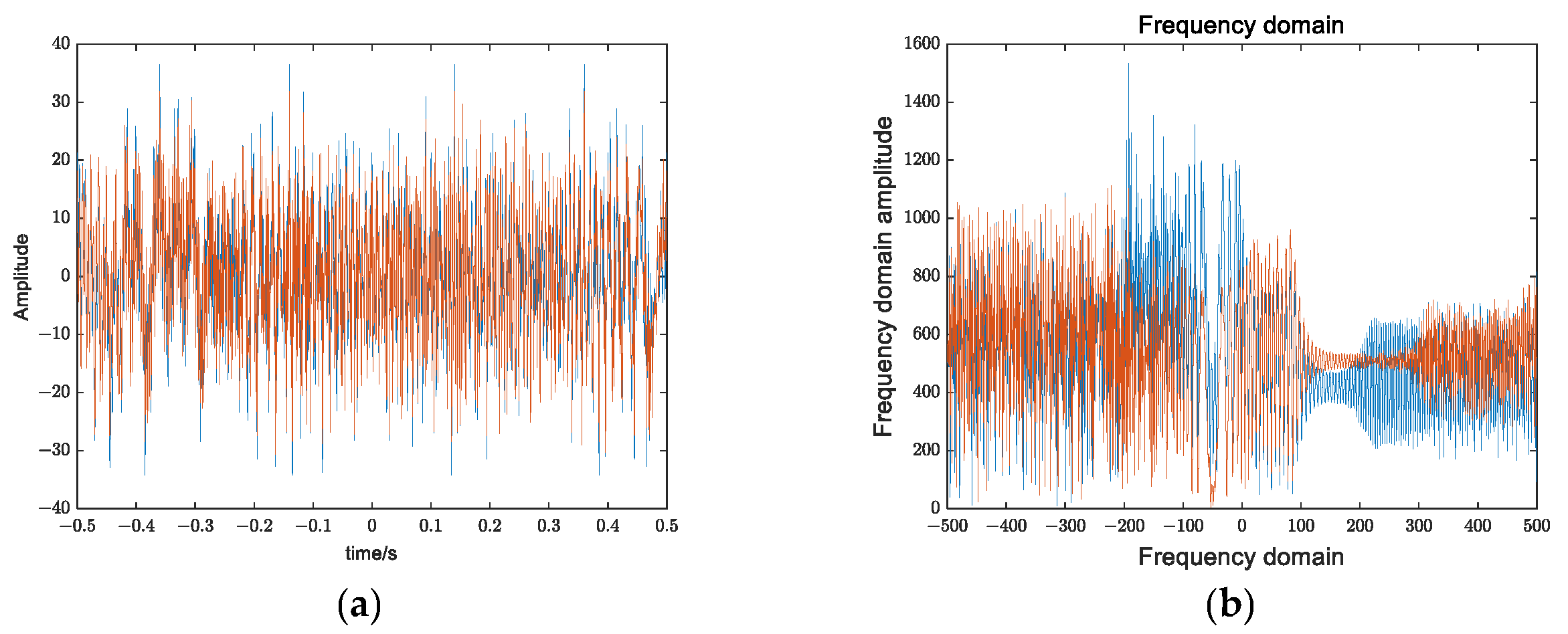
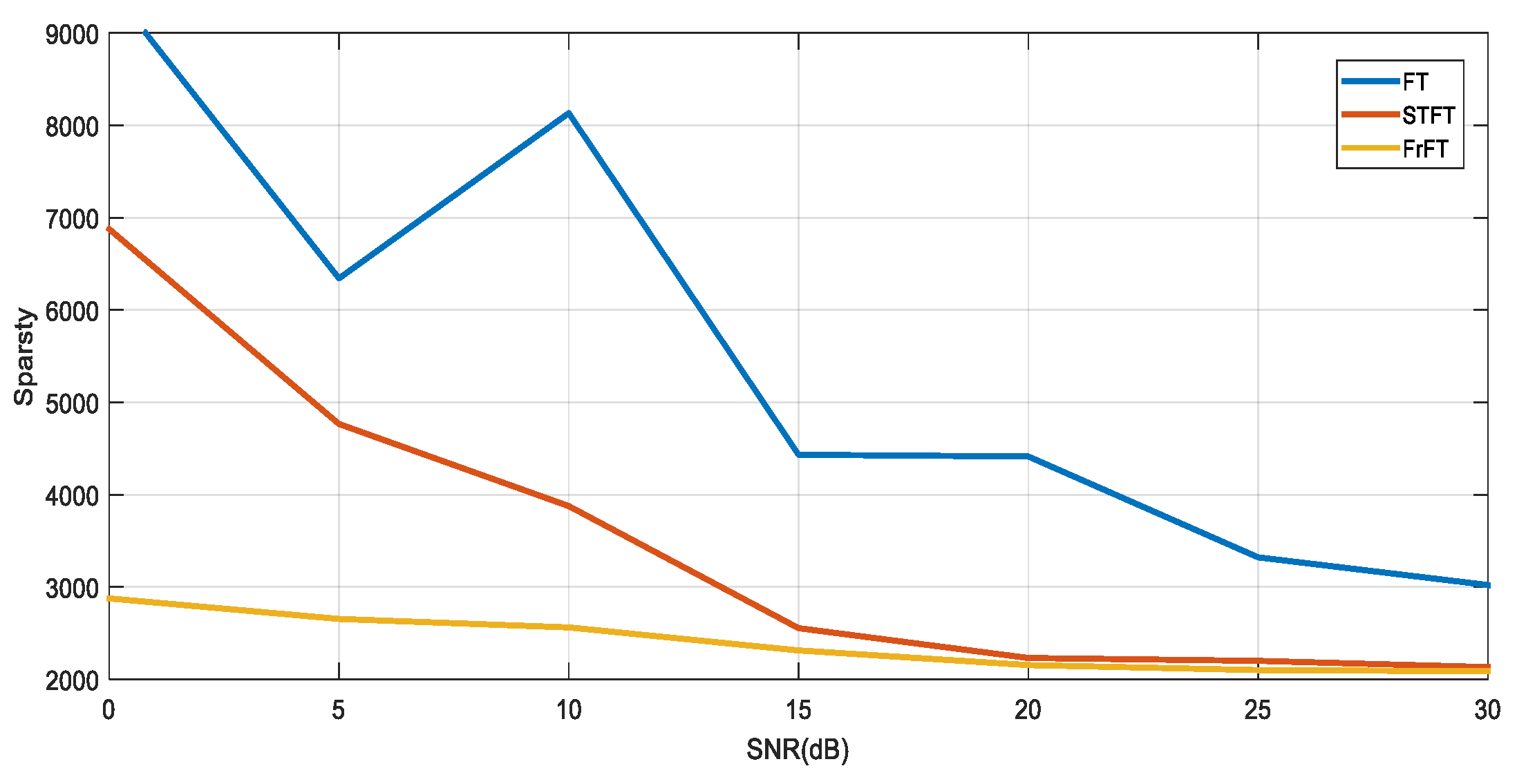
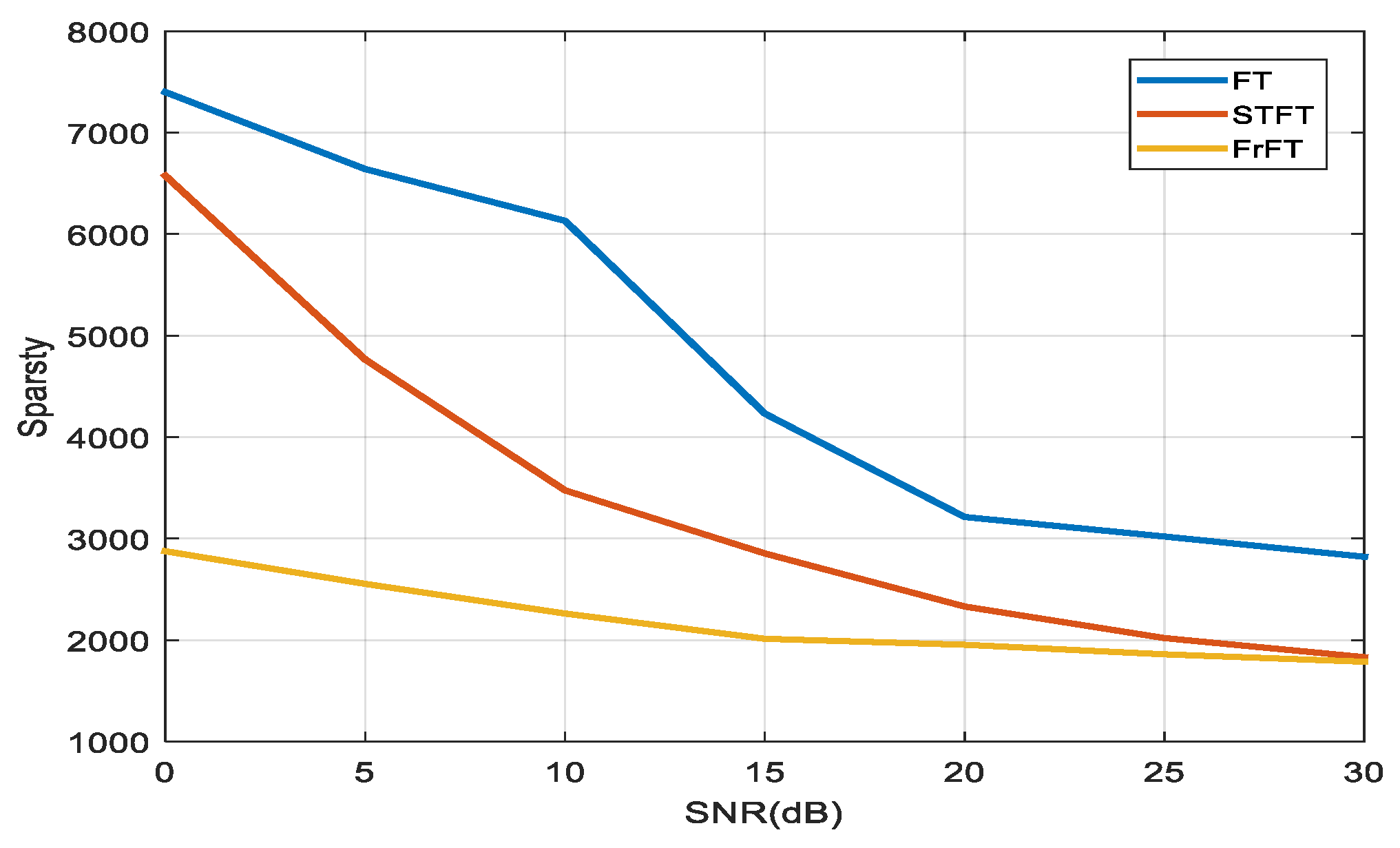
3.1. Noise Suppression in the Fractional Domain
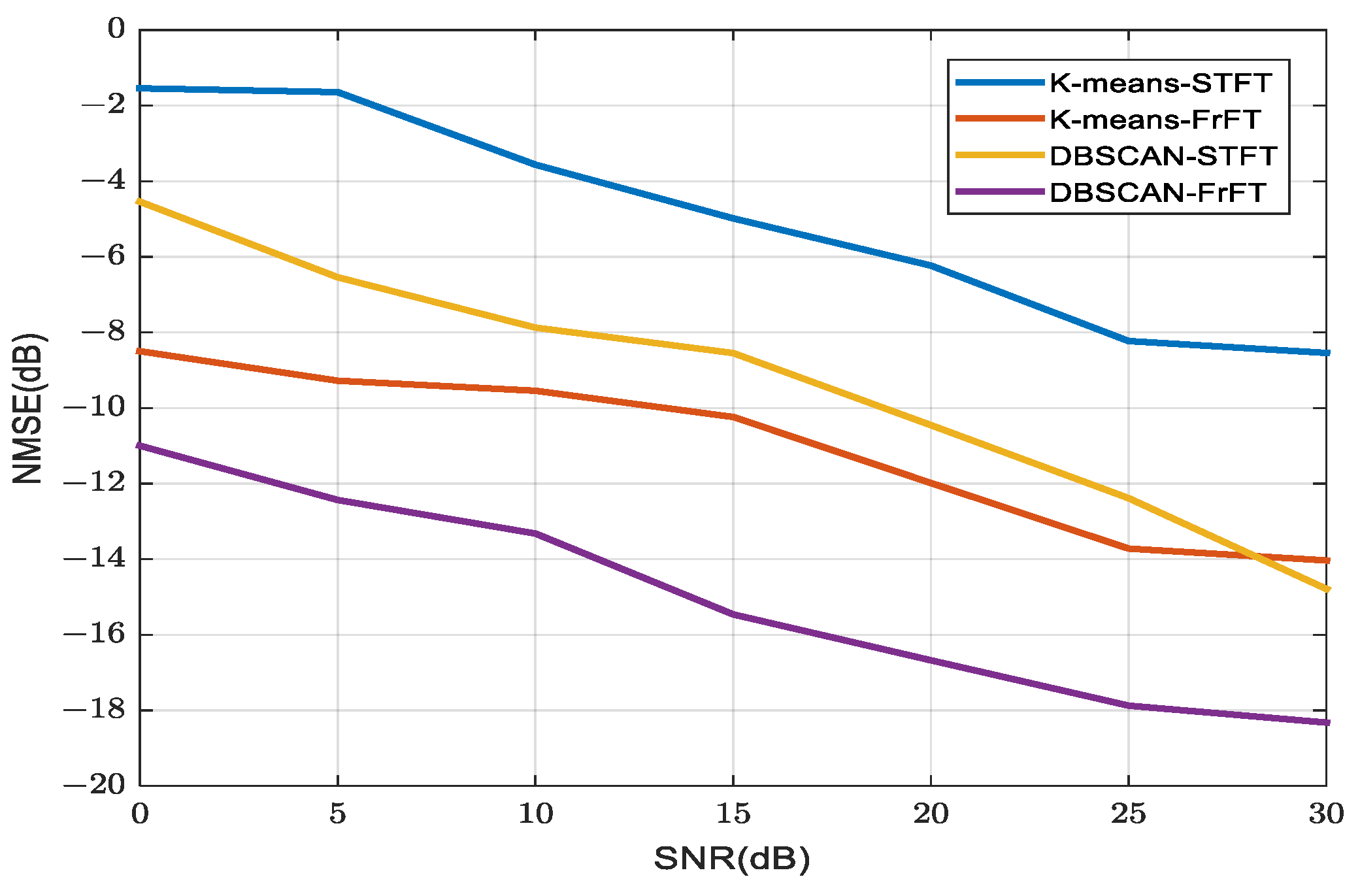
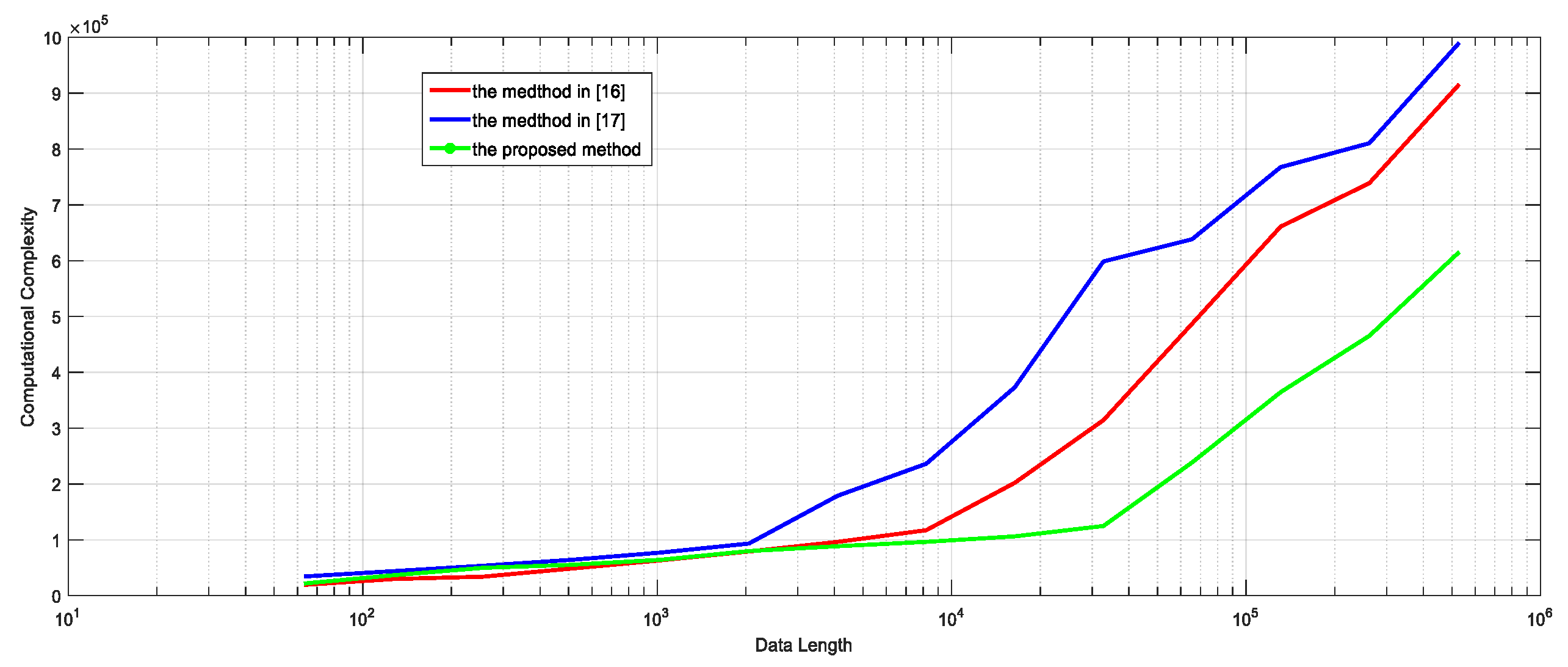
3.2. Comparison of Mixed Matrix Estimation Performance
0.4854 0.1419 0.9157 0.9595 0.0357 0.9340]
| Algorithm 2: Simulation algorithm steps |
|
| Algorithm 3: K-means algorithm steps |
|
0.2787 0.6687 0.7365 0.6865 0.4865 0.7987]
0.3654 0.3865 0.6825 0.7786 0.1329 0.9726]
| Algorithm 4: Steps of DBSCAN clustering algorithm |
|
0.5572 0.2528 0.6324 0.7563 0.0271 0.8473]
0.5425 0.1311 0.9646 0.8953 0.1335 0.9893]
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lewicki, M.S.; Sejnowski, T.J. Learning overcomplete representations. Neural Comput. 2000, 12, 337–365. [Google Scholar] [CrossRef] [PubMed]
- Bofill, P.; Zibulevsky, M. Underdetermined blind source separation using sparse representations. Signal Process. 2001, 81, 2353–2362. [Google Scholar] [CrossRef]
- Li, Y.Q.; Amari, S.; Cichocki, A.; Ho, D.W.C.; Xie, S.L. Underdetermined blind source separation based on sparse representation. IEEE Trans. Signal Process. 2006, 54, 423–437. [Google Scholar] [CrossRef]
- Xiao, M.; Xie, S.; Fu, Y. Time domain retrieval average method for blind separation of speech signals under uncertainty. Chin. Sci. Ser. E Inf. Sci. 2007, 37, 1564–1575. [Google Scholar]
- Kim, S.; Yoo, C.D. Underdetermined Blind Source Separation Based on Subspace Representation. IEEE Trans. Signal Process. 2009, 57, 2604–2614. [Google Scholar] [CrossRef]
- Wang, X.; Huang, Z.; Ren, X.; Zhou, Y. Underdetermined mixed blind identification algorithm based on time-frequency single source detection and clustering verification technology. J. Natl. Def. Univ. Sci. Technol. 2013, 35, 69–74. [Google Scholar]
- Chen, Y.Q.; Li, Y.X.; Juan, Z. Mixing Matrix Estimation in Underdetermined Blind Source Separation Based on Single Source Points Detection. In Proceedings of the 2018 18th IEEE International Conference on Communication Technology, Chongqing, China, 8–11 October 2018; pp. 1077–1081. [Google Scholar]
- Li, Y.; Geng, X.; Guo, X.; Sun, Q.; Ye, F.; Jiang, T. Mixing Matrix Estimation of Frequency Hopping Signals Based on Single Source Points Detection. In Proceedings of the 2019 USNC-URSI Radio Science Meeting (Joint with AP-S Symposium), Atlanta, GA, USA, 7–12 July 2019; pp. 13–14. [Google Scholar] [CrossRef]
- Yang, L.; Yang, J.; Guo, Y. Under-determined Blind Speech Separation via the Convolutive Transfer Function and lp Regularization. In Proceedings of the 2021 17th International Conference on Mobility, Sensing and Networking (MSN), Exeter, UK, 13–15 December 2021; pp. 705–709. [Google Scholar] [CrossRef]
- Kai, W.; Faping, Z.; Yunhe, Z.; Yi, L.; Tianhui, Z. Sparse Component Analysis Using Continuous Wavelet Transform for Blind Source Separation. In Proceedings of the 2019 IEEE 4th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chengdu, China, 20–22 December 2019; pp. 613–617. [Google Scholar] [CrossRef]
- Wang, J.; Zhao, Y. Blind source separation based on fractional fourier transform. In Proceedings of the 2011 International Conference on Mechatronic Science, Electric Engineering and Computer (MEC), Jilin, China, 19–22 August 2011; pp. 201–204. [Google Scholar] [CrossRef]
- Long, J.; Wang, H.; Zha, D. Fractional low order spatial time-frequency blind source separation in an infinite variance noise environment. Signal Process. 2014, 30, 1150–1156. [Google Scholar]
- Wang, Y.X.; Qi, L.; Guo, X.; Chen, E.Q. Multi Order Fractional Fourier transform domain feature face recognition based on sparse PCA. Comput. Appl. Res. 2016, 33, 1253–1257. [Google Scholar]
- Yao, J.; Huang, G. Research on blind source separation algorithm based on FRFT. Ship EW 2017, 40, 75–79+90. [Google Scholar] [CrossRef]
- Sun, T.; Liu, T.; Yang, Y. Multi order fractional Fourier domain feature fusion based sparse representation classification of active sonar targets. J. Electron. Inf. 2021, 43, 809–816. [Google Scholar]
- Zhen, L.; Peng, D.; Yi, Z.; Xiang, Y.; Chen, P. Underdetermined Blind Source Separation Using Sparse Coding. IEEE Transactions. Neural Netw. Learn. Syst. 2017, 28, 3102–3108. [Google Scholar] [CrossRef]
- He, X.; He, F. Clustering analysis of underdetermined mixed matrix based on single source detection. J. Electron. Meas. Instrum. 2019, 33, 157–164. [Google Scholar]
- Xie, Y.; Xie, K.; Wu, Z.; Xie, S. Underdetermined Blind Source Separation of Speech Mixtures Based on K-means Clustering. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 42–46. [Google Scholar] [CrossRef]
- Wang, L.; Hou, G.; Xiang, J. Mixing Matrix Estimation of Underdetermined Blind Source Separation based on Improved Density Clustering Algorithm. In Proceedings of the 2019 8th Asia-Pacific Conference on Antennas and Propagation (APCAP), Incheon, Republic of Korea, 4–7 August 2019; pp. 207–208. [Google Scholar] [CrossRef]
- Bezdek, J.C.; Ehrlich, R.; Full, W. FCM: The fuzzyc-means clustering algorithm. Comput. Geosci. 1984, 10, 191–203. [Google Scholar] [CrossRef]
- Sgouros, T.; Mitianoudis, N. A novel directional frame-work for source counting and source separation in instantaneous underdetermined audio mixtures. IEEE/ACM Trans. Audio Speech Lang. Process. 2020, 28, 2025–2035. [Google Scholar] [CrossRef]
- Tao, R.; Zhao, X.; Li, W.; Li, H.C.; Du, Q. Hyperspectral Anomaly Detection by Fractional Fourier Entropy. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4920–4929. [Google Scholar] [CrossRef]
- Fan, Z.Y.; Zhuang, X.D.; Li, Z.G. Multilevel FRFT speech enhancement based on sparse metric in transform domain. Comput. Eng. Des. 2020, 41, 2574–2584. [Google Scholar] [CrossRef]
- Hou, G.Y. Research on Underdetermined Blind Source Separation Algorithm Based on Compressed Sensing and Its Application. Master’s Thesis, Harbin Engineering University, Harbin, China, 2020. [Google Scholar] [CrossRef]
- Gorbunov, M.; Dolovova, O. Fractional Fourier Transform and Distributions in the Ray Space: Application for the Analysis of Radio Occultation Data. Remote Sens. 2022, 14, 5802. [Google Scholar] [CrossRef]
- Chen, H.; Xie, Q. PD time-frequency feature extraction based on fractional Fourier transform. Comput. Simul. 2021, 38, 343–347. [Google Scholar]
- Xie, K. Research on Underwater Acoustic Pulse Signal Detection Technology Based on Fractional Fourier Transform and Multi-Channel. Master’s Thesis, Harbin Engineering University, Harbin, China, 2021. [Google Scholar]
- Wang, X.; Xue, L.; Wang, Y. Research on pulse interference suppression method based on STFRFT. J. Hebei Univ. Sci. Technol. 2021, 42, 15–21. [Google Scholar]
- Li, X.; Yang, Y.; Yang, M. Blind source separation of underwater target echoes and reverberation in fractional Fourier domain. J. Harbin Eng. Univ. 2019, 40, 786–791. [Google Scholar] [CrossRef]
- Giacobello, D.; Christensen, M.G.; Murthi, M.N.; Holdt Jensen, S.H.; Moonen, M. Enhancing sparsity in linear prediction of speech by iteratively reweighted 1-norm minimization. In Proceedings of the 2010 IEEE International Conference on Acoustics, Speech and Signal Processing, Dallas, TX, USA, 4–19 March 2010; pp. 4650–4653. [Google Scholar] [CrossRef]
- Chu, C. Single Carrier Fractional Fourier Domain Equalization System and Key Technologies. Master’s Thesis, Zhengzhou University, Zhengzhou, China, 2015. [Google Scholar]
- Zhao, H.; Qiao, L.; Deng, L.; Chen, Y. Construction of chaotic sensing matrix for fractional bandlimited signal associated by fractional fourier transform. In Proceedings of the 2016 IEEE AUTOTESTCON, Anaheim, CA, USA, 12–15 September 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Yang, Y.; Yang, S.; Ding, Y. Research on Active Sonar Object Echo Signal Enhancement Technology in the Spatial Fractional Fourier Domain. Acoust. Aust. 2021, 49, 495–504. [Google Scholar] [CrossRef]
- Wang, S.; Guo, Y.; Yang, L. Research on FM signal sparsity in fractional Fourier transform domain. Optoelectron. Eng. 2020, 47, 190660. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ways of Improvement | Paper | Year | Method | Novelty | Limitation |
|---|---|---|---|---|---|
| Establishment of sparse model for observed signal | [4] | 2007 | Directly complete the mixed matrix estimation in the time domain | Reduce the amount of computation | Not valuable in engineering applications |
| [5] | 2007 | Single Source Point (SSP) | Increase the linear clustering characteristics | Pseudo SSPs | |
| [6] | 2013 | Improved SSP detection | A singular value decomposition method | Computational load is greatly increased | |
| [7] | 2018 | Local stationarity and distribution symmetry | |||
| [8] | 2019 | Low noise points | |||
| [9] | 2021 | lp (0 < p ≤ 1) regularisation to reconstruct the sparse sources | Robustness to room reverberation | Computational complexity | |
| [10] | 2019 | Wavelet transform | Increases the time and frequency information | Excessive redundancy | |
| [11] | 2011 | Fractional Fourier Transform (FrFT) | First proposed to use FrFT to implement BSS | The possibility is derived, but the actual algorithm is not given | |
| [12] | 2014 | First proposed fractional time–frequency space | Signal sparsity is not discussed | ||
| [13] | 2016 | Proposed using sparsity to study the fractional domain | Discussion on image signal only | ||
| [14] | 2017 | Using fractional field to realise FastICA | Only BSS is discussed | ||
| [15] | 2021 | Energy aggregation and insensitivity | The global threshold is used to search the fractional domain transformation order, which requires a large amount of computation | ||
| Selection of clustering methods | [16] | 2017 | Hierarchical clustering | Without setting initial value | High requirements on data points |
| [17] | 2019 | Density-Based Spatial Clustering of Applications with Noise (DBSCAN) | Automatically find the number of clusters and the corresponding cluster centre | The number of clusters has a large error due to the presence of interference | |
| [18] | 2019 | K-means | Simple and fast | Local optimal solution | |
| [19] | 2019 | Particle Swarm Optimisation (PSO) | Good determination of the number of source signals | Unable to converge globally | |
| [21] | 2020 | Directed Fuzzy C-Means (DFCM) | Considers the direction | Interfered with by outliers |
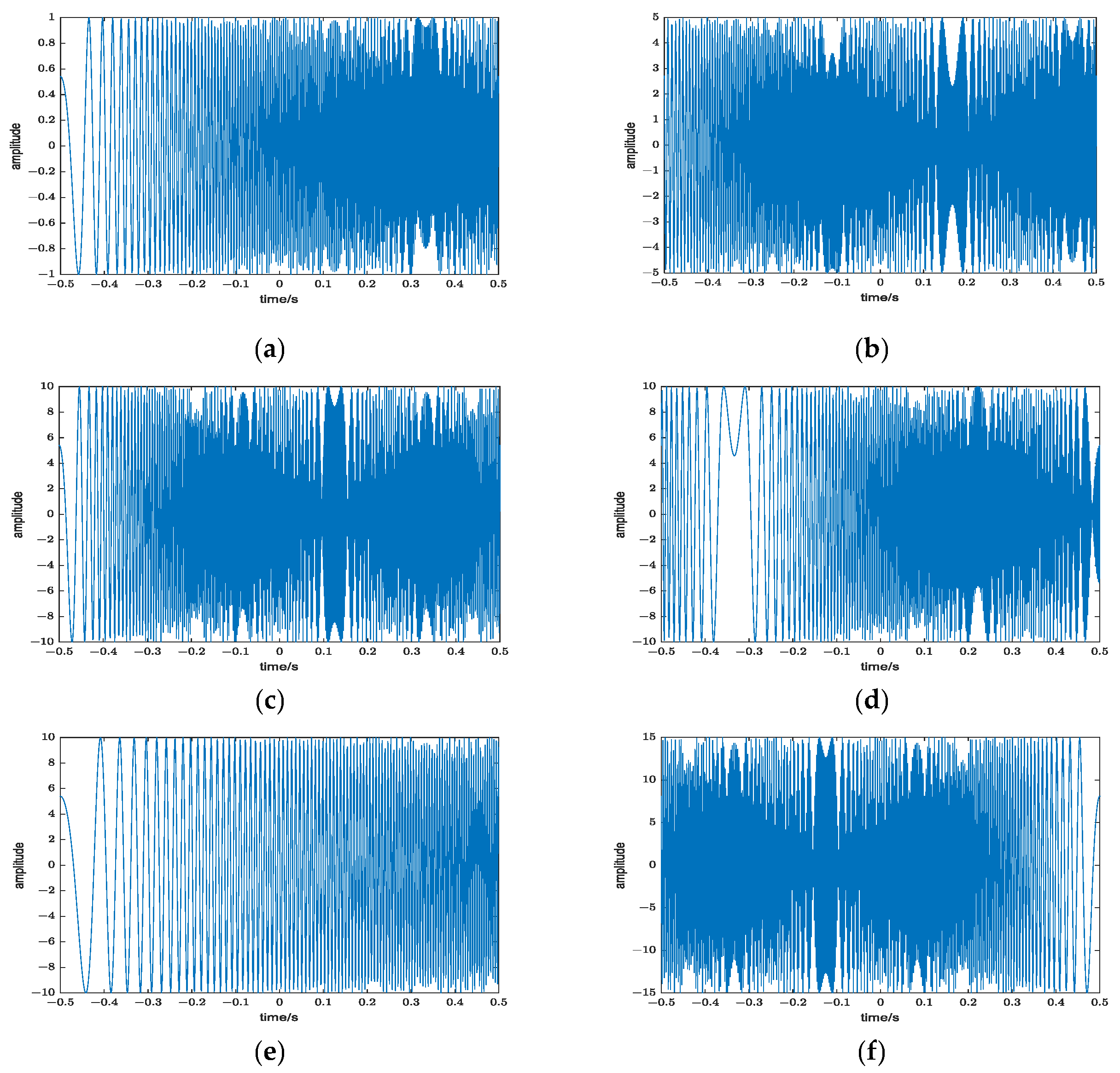
| Amplitude | Chirp Rate | Starting Frequency | |
|---|---|---|---|
| 1 | 400 | 200 | |
| 5 | 600 | 400 | |
| 10 | 800 | 400 | |
| 10 | 600 | 200 | |
| 10 | 200 | 100 | |
| 15 | 800 | 600 |
| Data Set | NMSE | |||
|---|---|---|---|---|
| K-Means | DBSCAN | |||
| STFT | FrFT | STFT | FrFT | |
| Clean signal | −8.7679 | −14.1429 | −15.0967 | −18.4557 |
| SNR = 0 | −1.5434 | −8.4982 | −4.5434 | −10.9985 |
| SNR = 5 | −1.6442 | −9.2785 | −6.5421 | −12.4329 |
| SNR = 10 | −3.5643 | −9.5437 | −7.8739 | −13.3212 |
| SNR = 15 | −4.9838 | −10.2379 | −8.5470 | −15.4596 |
| SNR = 20 | −6.2324 | −11.9833 | −10.4534 | −16.6733 |
| SNR = 25 | −8.2294 | −13.7192 | −12.3858 | −17.8734 |
| SNR = 30 | −8.5430 | −14.0319 | −14.7854 | −18.3212 |
| Data Set | NMSE | |||
|---|---|---|---|---|
| K-Means | DBSCAN | |||
| STFT | FrFT | STFT | FrFT | |
| Clean signal | −9.0591 | −14.7524 | −15.1111 | −18.8518 |
| SNR = 0 | −2.0793 | −8.1088 | −7.8875 | −11.3087 |
| SNR = 5 | −3.7684 | −10.5634 | −8.6599 | −12.8743 |
| SNR = 10 | −4.5609 | −11.5437 | −9.0765 | −13.7647 |
| SNR = 15 | −6.3658 | −11.8675 | −10.8847 | −14.7824 |
| SNR = 20 | −7.2324 | −12.6894 | −12.5973 | −16.2533 |
| SNR = 25 | −8.2294 | −13.6219 | −13.5635 | −17.0053 |
| SNR = 30 | −8.9430 | −14.4297 | −14.3764 | −18.4534 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Ramli, D.A. Research on Mixed Matrix Estimation Algorithm Based on Improved Sparse Representation Model in Underdetermined Blind Source Separation System. Electronics 2023, 12, 456. https://doi.org/10.3390/electronics12020456
Li Y, Ramli DA. Research on Mixed Matrix Estimation Algorithm Based on Improved Sparse Representation Model in Underdetermined Blind Source Separation System. Electronics. 2023; 12(2):456. https://doi.org/10.3390/electronics12020456
Chicago/Turabian StyleLi, Yangyang, and Dzati Athiar Ramli. 2023. "Research on Mixed Matrix Estimation Algorithm Based on Improved Sparse Representation Model in Underdetermined Blind Source Separation System" Electronics 12, no. 2: 456. https://doi.org/10.3390/electronics12020456
APA StyleLi, Y., & Ramli, D. A. (2023). Research on Mixed Matrix Estimation Algorithm Based on Improved Sparse Representation Model in Underdetermined Blind Source Separation System. Electronics, 12(2), 456. https://doi.org/10.3390/electronics12020456