
Longitudinal and Lateral Stability Control Strategies for ACC Systems of Differential Steering Electric Vehicles

Abstract
:1. Introduction
2. Modeling of DSV
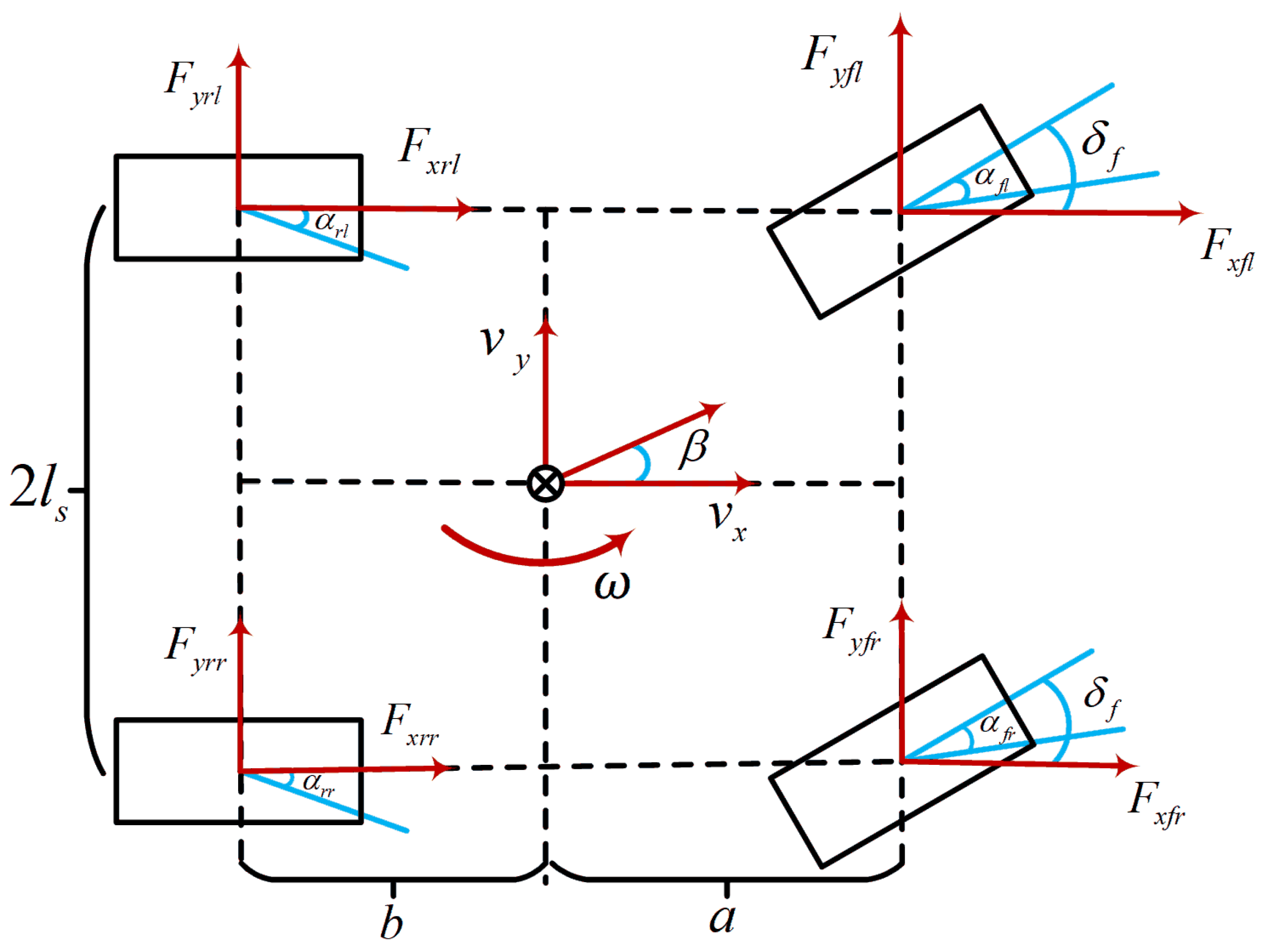
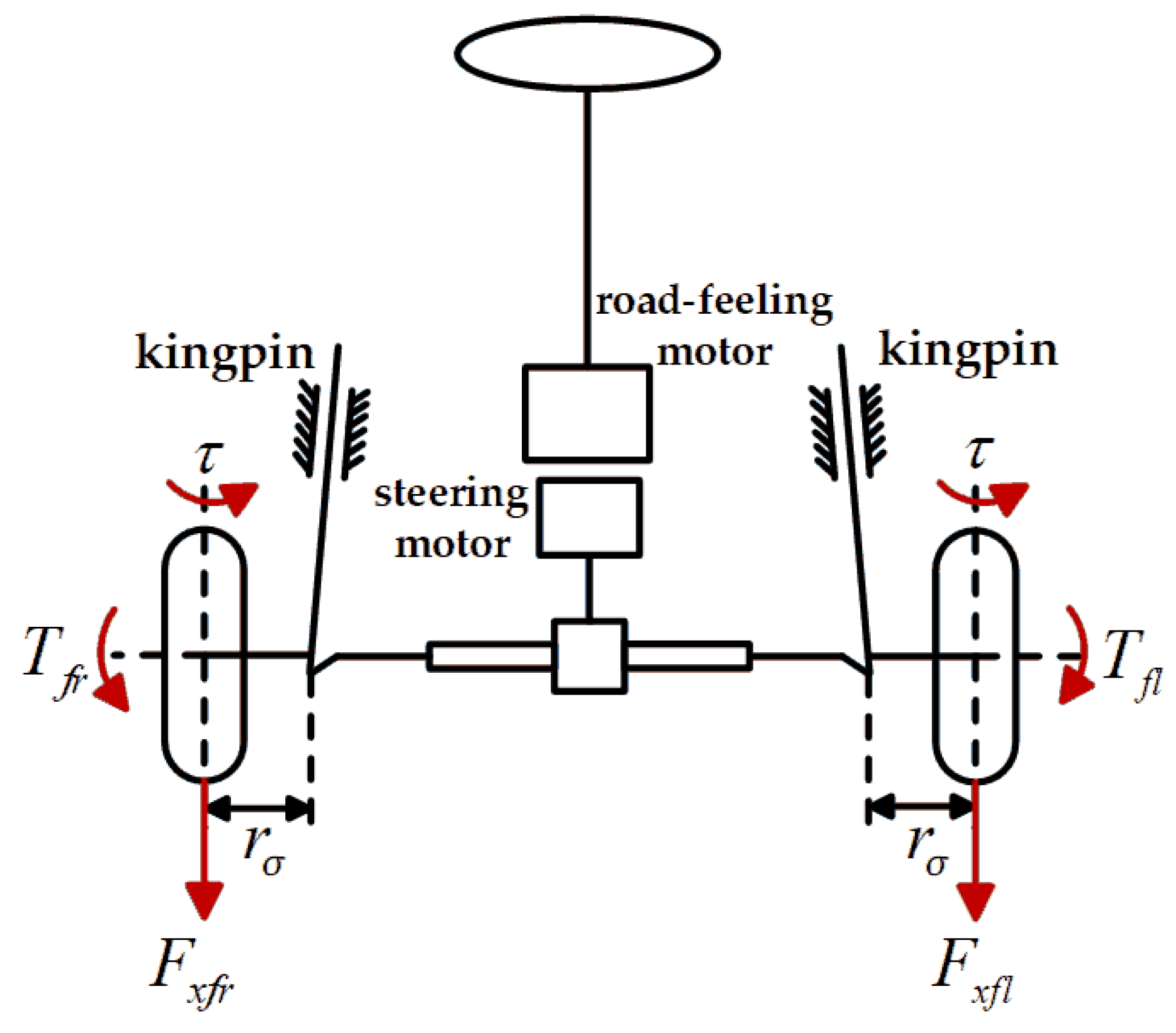
2.1. Dynamics Model of DSV
2.2. In-Wheel Motor Model
2.3. 2-DOF Vehicle Model
3. Control Strategy of Curving ACC System for DSV
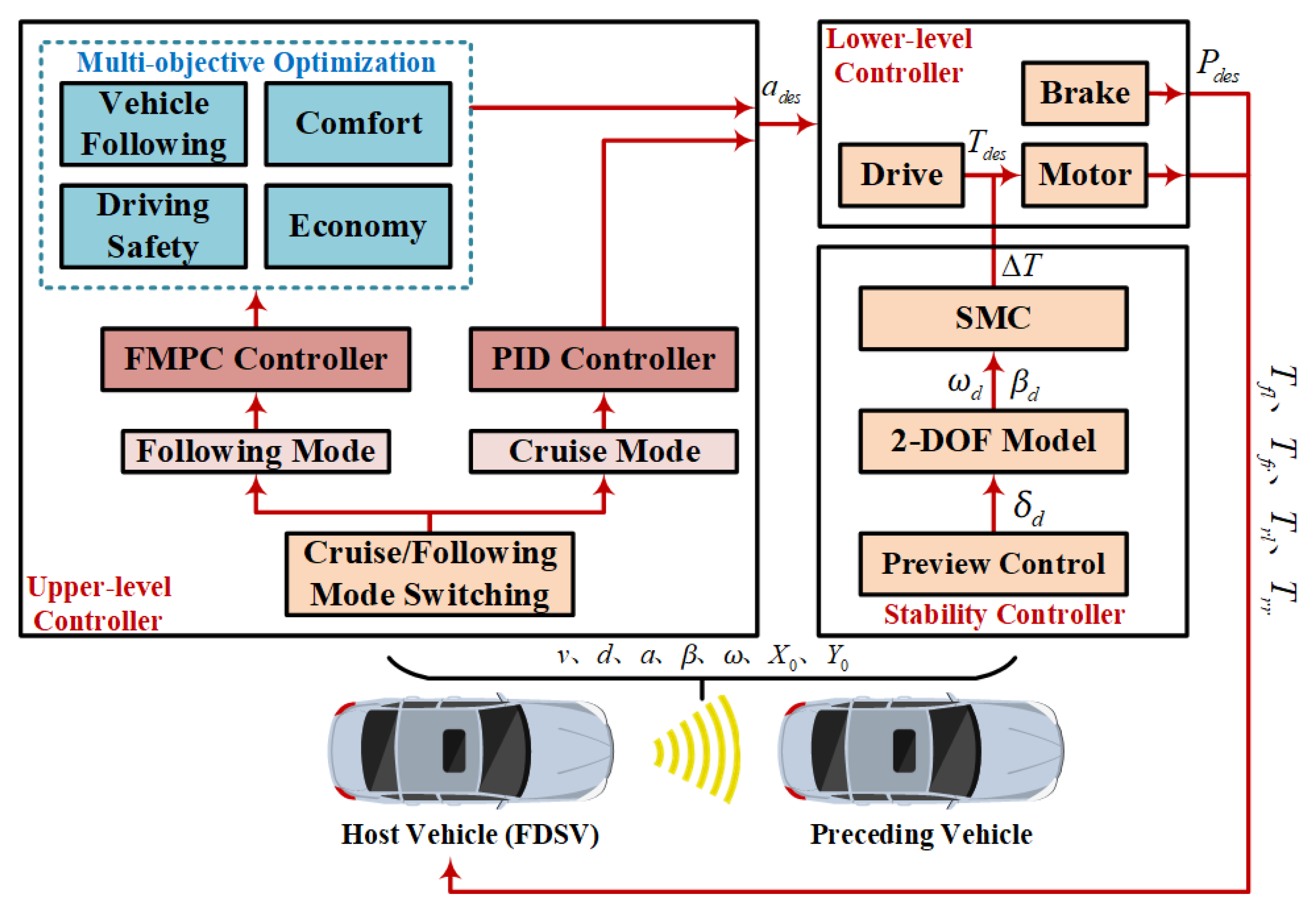
3.1. The Framework of Curving ACC Control Strategy for DSV
3.2. The Upper-Level Control Strategy of the Cruise Mode
3.3. The Upper-Level Control Strategy of the Following Mode
3.3.1. Safety Inter-Distance Model
3.3.2. Longitudinal Kinematics Model
3.3.3. Scrolling Optimization
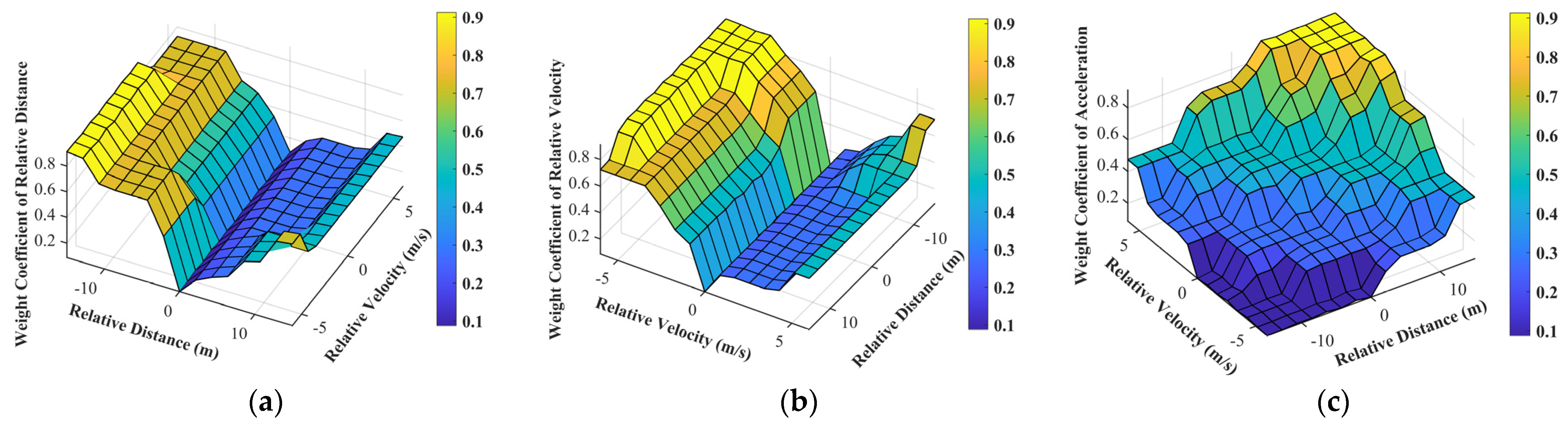
3.3.4. Variable Weight Coefficient Design Based on Fuzzy Control
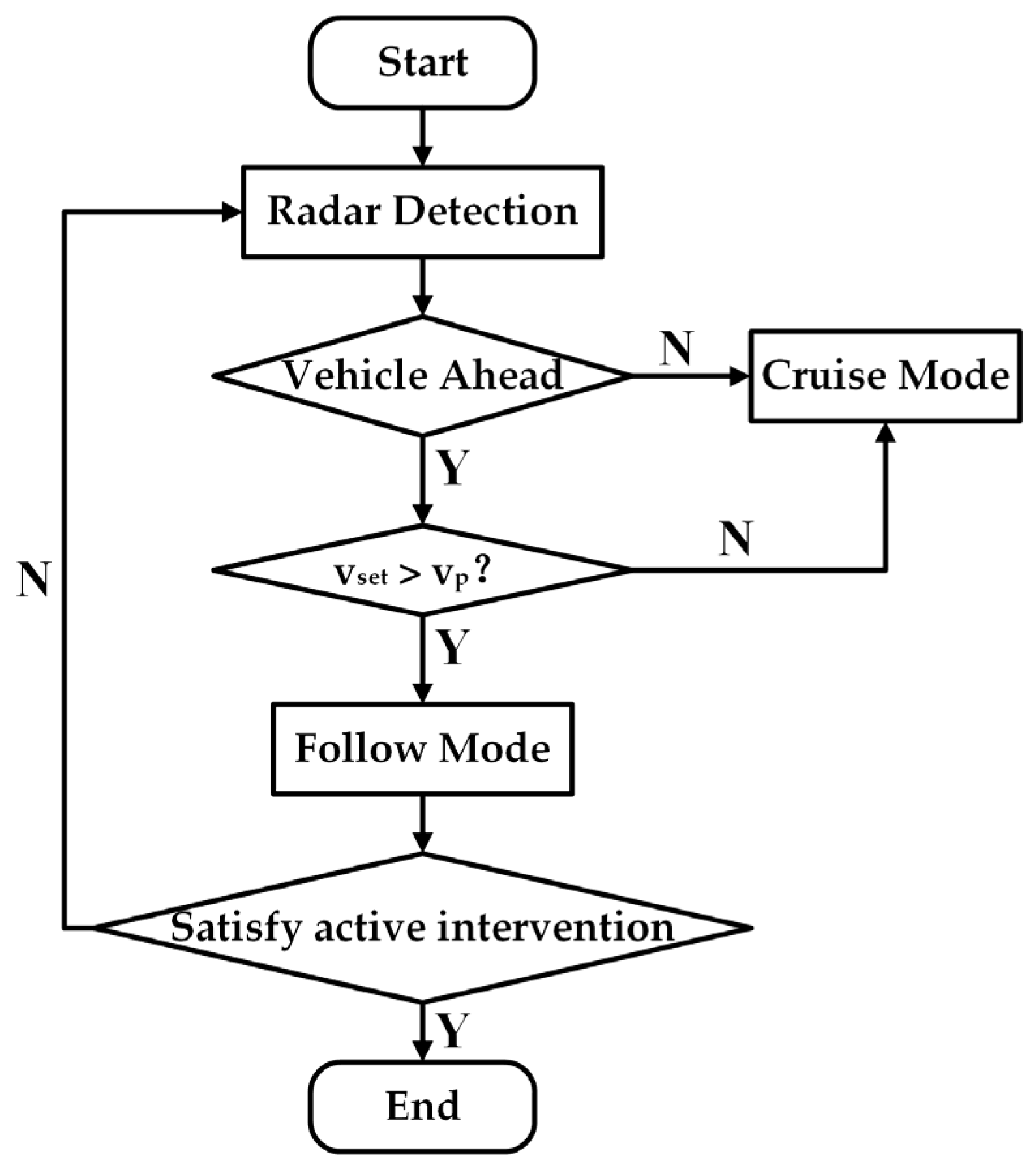
3.4. Mode Switching Logic of Curving ACC System for DSV
- The ACC system detects whether or not there is a preceding vehicle through the sensor, and the driver pre-sets the desired cruising speed. If the sensor does not detect the preceding vehicle, the ACC system will switch to the cruise mode for the speed to reach the desired driving speed. On the contrary, further judgment is needed;
- If the preceding vehicle’s speed,, is detected as less than the cruise speed, , the ACC system will switch to the following mode. On the contrary, it will enter or maintain the cruise mode;
- In the actual driving process, the ACC, as an auxiliary driving system, must follow the driver’s instruction priority principle. If the driver encounters an emergency during the driving process, the ACC system should immediately terminate the work and wait for the driver’s activation instructions when the driver has a mandatory operation.
3.5. The Lower-Level Control Strategy of the Curving ACC System
3.5.1. Driving Model
3.5.2. Braking Model
3.5.3. Design of Lower-Level Controller Based on PID
3.6. Verification of Simulation Results
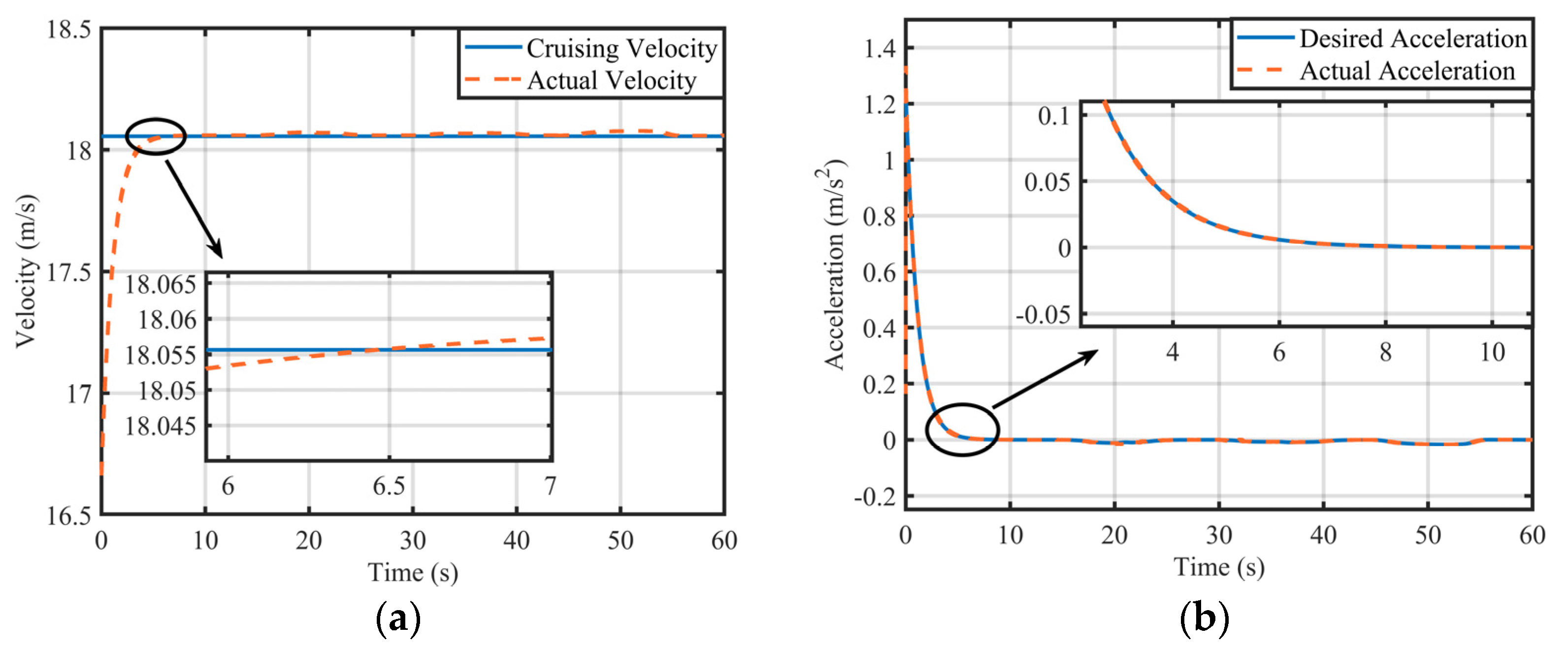
3.6.1. Constant Speed Cruise Driving Scenario
- Cruising Speed, 65 km/h (18.06 m/s);
- 2.
- Cruising Speed, 45 km/h (12.5 m/s);
3.6.2. Distance Following Driving Scenario
4. Lateral Stability Control of DSV Curving Cruise
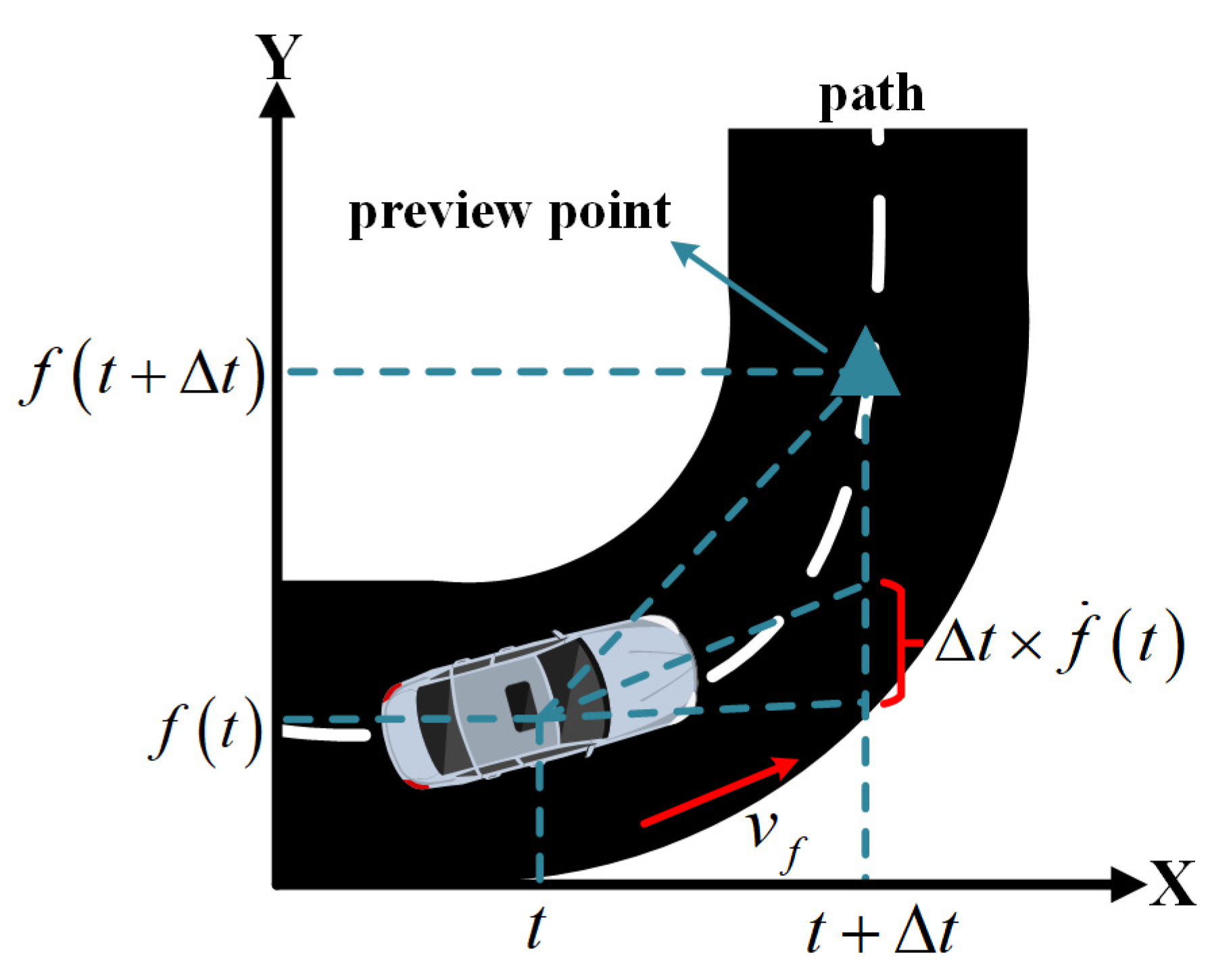
4.1. Preview Model Design
4.2. Lateral Stability Controller of DSV Based on SMC
5. Analysis of Simulation Results
5.1. The Simulation of the Preceding Vehicle Driving at a Constant Speed
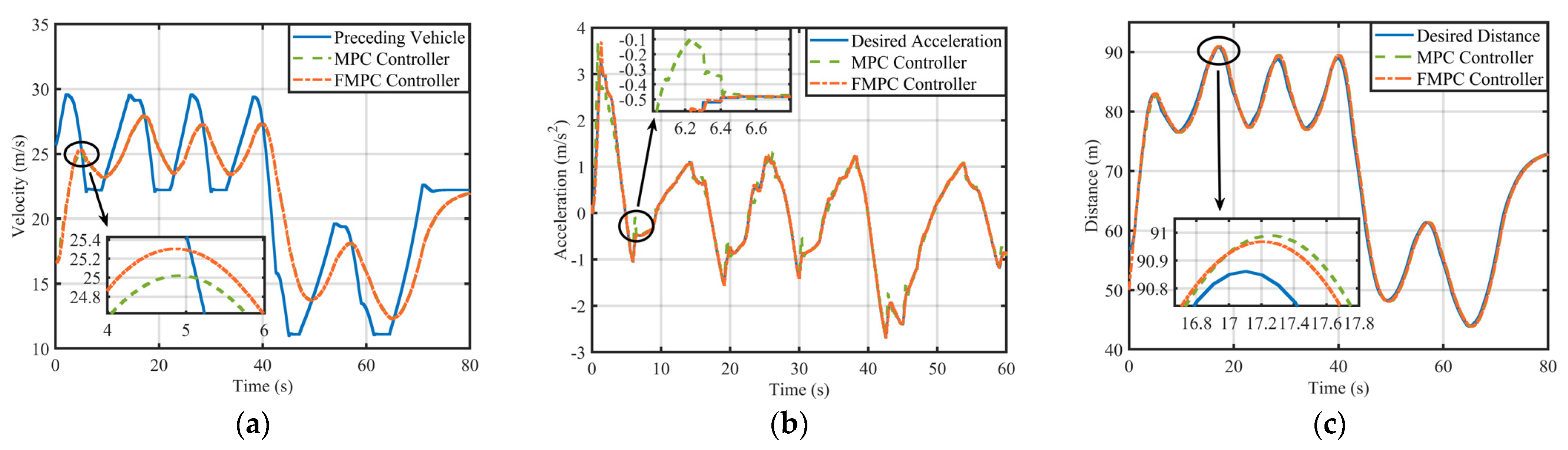
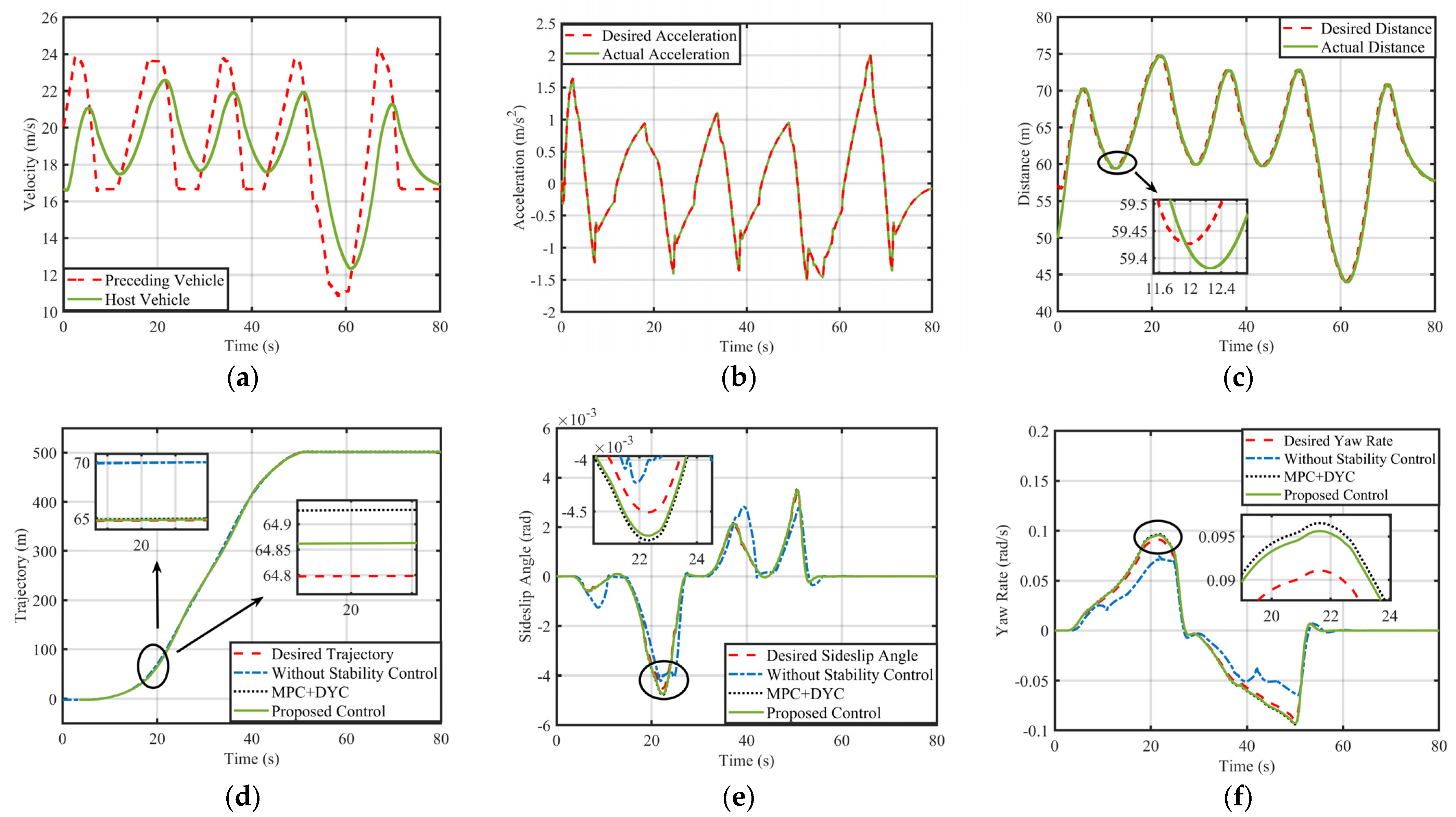
5.2. The Simulation of the Preceding Vehicle Driving at a Variable Speed
6. Conclusions
7. Future Work and Prospects
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| frontal area | |
| coefficient matrix of constraints | |
| acceleration in acceleration resistance | |
| steering damping | |
| constant term matrix of constraints | |
| preview distance | |
| safe inter-distance | |
| minimum holding inter-distance | |
| coefficient of rolling resistance | |
| vehicle moment of inertia | |
| equivalent moment of inertia | |
| stability factor | |
| half of the front wheel distance | |
| vehicle mass | |
| control time domain | |
| prediction time domain | |
| wheel rolling radius | |
| curvature radius | |
| total desired driving torque of IWM | |
| driving torque of four wheels | |
| output torque of the motor in a constant power range | |
| acceleration time of the motor in the constant torque range | |
| acceleration time of the motor in the constant power range | |
| set of control variables | |
| actual speed of the motor | |
| speed of host vehicle | |
| driver’s preset cruise speed | |
| speed of preceding vehicle | |
| longitudinal speed of host vehicle | |
| lateral speed of host vehicle | |
| correction matrix | |
| relaxation factor | |
| aligning torque | |
| friction torque of the steering system | |
| time headway | |
| coefficient of road adhesion | |
| sideslip angle | |
| yaw rate | |
| steering angle of front wheel | |
| error of inter-distance | |
| front wheel drive torque difference | |
| forward-looking time | |
| Acronyms | |
| ACC | adaptive cruise control |
| CTH | constant time headway |
| DSC | differential steering control |
| DSV | differential steering vehicle |
| DYC | direct yaw-moment control |
| FHWY | federal highway administration |
| FMPC | fuzzy model predictive control |
| IWM | in-wheel motor |
| MPC | model predictive control |
| PID | proportion integration differentiation |
| RBC | rollover braking control |
| RSC | rear steering control |
| SBW | steer-by-wire |
| SMC | sliding mode control |
| THW | time headway |
| 2-DOF | two degrees of freedom |
| 3-DOF | three degrees of freedom |
References
- Li, Z.; Deng, Y.; Sun, S. Adaptive Cruise Predictive Control Based on Variable Compass Operator Pigeon-Inspired Optimization. Electronics 2022, 11, 1377. [Google Scholar] [CrossRef]
- Bekiaris-Liberis, N.; Roncoli, C.; Papageorgiou, M. Predictor-Based Adaptive Cruise Control Design with Integral Action. IFAC-PapersOnLine 2018, 51, 86–91. [Google Scholar] [CrossRef]
- Xiao, G.; Zhang, H.; Sun, N.; Zhang, Y. Cooperative Link Scheduling for RSU-Assisted Dissemination of Basic Safety Messages. Wirel. Netw. 2021, 27, 1335–1351. [Google Scholar] [CrossRef]
- Yao, J.; Ge, Z. Path-Tracking Control Strategy of Unmanned Vehicle Based on DDPG Algorithm. Sensors 2022, 22, 7881. [Google Scholar] [CrossRef] [PubMed]
- Lian, J. The Intelligent Vehicle Control System Based on the Fuzzy Neural Network Technology. Adv. Mater. Res. 2012, 487, 830–835. [Google Scholar] [CrossRef]
- Gao, H.; Zhang, X.; Liu, Y.; Li, D. Cloud Model Approach for Lateral Control of Intelligent Vehicle Systems. Sci. Program. 2016, 2016, 6842891. [Google Scholar] [CrossRef]
- Abbasimoshaei, A.; Chinnakkonda Ravi, A.K.; Kern, T.A. Development of a New Control System for a Rehabilitation Robot Using Electrical Impedance Tomography and Artificial Intelligence. Biomimetics 2023, 8, 420. [Google Scholar] [CrossRef] [PubMed]
- Shang, M.; Rosenblad, B.; Stern, R. A Novel Asymmetric Car Following Model for Driver-Assist Enabled Vehicle Dynamics. IEEE Trans. Intell. Transp. Syst. 2022, 23, 15696–15706. [Google Scholar] [CrossRef]
- Guo, Y.; Sun, Q.; Fu, R.; Wang, C. Improved Car-Following Strategy Based on Merging Behavior Prediction of Adjacent Vehicle from Naturalistic Driving Data. IEEE Access 2019, 7, 44258–44268. [Google Scholar] [CrossRef]
- Yen, Y.; Chou, J.; Shih, C.; Chen, C.; Tsung, P. Proactive Car-Following Using Deep-Reinforcement Learning. In Proceedings of the 23rd IEEE International Conference on Intelligent Transportation Systems, Rhodes, Greece, 20–23 September 2020. [Google Scholar]
- Moon, S.; Yi, K. Human Driving Data-Based Design of a Vehicle Adaptive Cruise Control Algorithm. Veh. Syst. Dyn. 2008, 46, 661–690. [Google Scholar] [CrossRef]
- Moon, S.; Yi, K.; Kang, H.; Yoon, P. Adaptive Cruise Control with Collision Avoidance in Multi-Vehicle Traffic Situations. SAE Tech. Pap. 2009, 2, 653–660. [Google Scholar] [CrossRef]
- Mohtavipour, S.M.; Mollajafari, M. An Analytically Derived Reference Signal to Guarantee Safety and Comfort in Adaptive Cruise Control Systems. J. Intell. Transp. Syst. 2021, 25, 1–20. [Google Scholar] [CrossRef]
- Das, L.; Won, M. SAINT-ACC: Safety-Aware Intelligent Adaptive Cruise Control for Autonomous Vehicles Using Deep Reinforcement Learning. Proc. Mach. Learn. Res. 2021, 139, 2445–2455. [Google Scholar]
- Li, S.E.; Jia, Z.; Li, K.; Cheng, B. Fast Online Computation of a Model Predictive Controller and Its Application to Fuel Economy-Oriented Adaptive Cruise Control. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1199–1209. [Google Scholar] [CrossRef]
- Lin, Y.C.; Nguyen, H.L.T.; Balas, V.E.; Lin, T.C.; Kuo, I.C. Adaptive Prediction-Based Control for an Ecological Cruise Control System on Curved and Hilly Roads. J. Intell. Fuzzy Syst. 2020, 38, 6129–6144. [Google Scholar] [CrossRef]
- Tian, J.; Zeng, Q.; Wang, P.; Wang, X. Active Steering Control Based on Preview Theory for Articulated Heavy Vehicles. PLoS ONE 2021, 16, e0252098. [Google Scholar] [CrossRef]
- Guo, J.H.; Luo, Y.G.; Li, K.Q. Adaptive Fuzzy Sliding Mode Control for Coordinated Longitudinal and Lateral Motions of Multiple Autonomous Vehicles in a Platoon. Sci. China Technol. Sci. 2017, 60, 576–586. [Google Scholar] [CrossRef]
- Zhang, D.; Li, K.; Wang, J. A Curving ACC System with Coordination Control of Longitudinal Car-Following and Lateral Stability. Veh. Syst. Dyn. 2012, 50, 1085–1102. [Google Scholar]
- Li, H.; Li, J.; Su, Z.; Wang, X.; Luo, J. Research on Active Obstacle Avoidance Control Strategy for Intelligent Vehicle Based on Active Safety Collaborative Control. IEEE Access 2020, 8, 183736–183748. [Google Scholar] [CrossRef]
- Idriz, A.F.; Rachman, A.S.A.; Baldi, S. Integration of Auto-Steering with Adaptive Cruise Control for Improved Cornering Behaviour. IET Intell. Transp. Syst. 2017, 11, 667–675. [Google Scholar] [CrossRef]
- Gao, F.; Zhao, F.; Zhang, Y. Research on Path Tracking and Yaw Stability Coordination Control Strategy for Four-Wheel Independent Drive Electric Trucks. Processes 2023, 11, 2473. [Google Scholar] [CrossRef]
- Tian, J.; Yang, M. Hierarchical Control of Differential Steering for Four-in-Wheel-Motor Electric Vehicle. PLoS ONE 2023, 18, e0285485. [Google Scholar] [CrossRef]
- Tian, J.; Yang, M. Research on Trajectory Tracking and Body Attitude Control of Autonomous Ground Vehicle Based on Differential Steering. PLoS ONE 2023, 18, e0273255. [Google Scholar] [CrossRef]
- Chen, T.; Cai, Y.; Chen, L.; Xu, X.; Sun, X. Trajectory Tracking Control of Steer-by-Wire Autonomous Ground Vehicle Considering the Complete Failure of Vehicle Steering Motor. Simul. Model. Pract. Theory 2021, 109, 102235. [Google Scholar] [CrossRef]
- Tian, H.; Zhu, W.; Wang, S. Adaptive Electronic Differential Control of Vehicle by Torque Balance. Mob. Netw. Appl. 2020, 25, 1604–1610. [Google Scholar] [CrossRef]
- Li, C.; Xie, Y.F.; Wang, G.; Liu, S.Q.; Kuang, B.; Jing, H. Experimental Study of Electric Vehicle Yaw Rate Tracking Control Based on Differential Steering. J. Adv. Transp. 2021, 2021, 6668091. [Google Scholar] [CrossRef]
- Du, P.; Ma, Z.; Chen, H.; Xu, D.; Wang, Y.; Jiang, Y.; Lian, X. Speed-Adaptive Motion Control Algorithm for Differential Steering Vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 672–685. [Google Scholar] [CrossRef]
- Zheng, C.; Xu, D.; Cao, J.; Li, W. Design of Lightweight Electric Forestry Monorail Vehicle. J. For. Eng. 2021, 6, 140–146. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, C.; Wu, X.; Chen, Z.; Huang, X.; Lin, J. Design of Automatic Cut-off Machine with Selected Length to Bamboo and Analysis of Corresponding Movement. J. For. Eng. 2021, 6, 143–146. [Google Scholar] [CrossRef]
- Li, H.; Wang, L.; Wang, F.; Li, Z. Research on Multi-Objective Optimization of Support Parameters of High-Speed Railway Tunnel. J. For. Eng. 2021, 6, 169–175. [Google Scholar] [CrossRef]
- Peng, F.; Wang, Y.; Xuan, H.; Nguyen, T.V.T. Efficient Road Traffic Anti-Collision Warning System Based on Fuzzy Nonlinear Programming. Int. J. Syst. Assur. Eng. Manag. 2022, 13, 456–461. [Google Scholar] [CrossRef]
- Nguyen, T.V.T.; Huynh, N.T.; Vu, N.C.; Kieu, V.N.D.; Huang, S.C. Optimizing Compliant Gripper Mechanism Design by Employing an Effective Bi-Algorithm: Fuzzy Logic and ANFIS. Microsyst. Technol. 2021, 27, 3389–3412. [Google Scholar] [CrossRef]
- Vu, T.M.; Moezzi, R.; Cyrus, J.; Hlava, J. Model Predictive Control for Autonomous Driving Vehicles. Electronics 2021, 10, 2593. [Google Scholar] [CrossRef]
- Guo, L.; Ge, P.; Sun, D.; Qiao, Y. Adaptive Cruise Control Based on Model Predictive Control with Constraints Softening. Appl. Sci. 2020, 10, 1635. [Google Scholar] [CrossRef]
- Shakouri, P.; Ordys, A. Nonlinear Model Predictive Control Approach in Design of Adaptive Cruise Control with Automated Switching to Cruise Control. Control Eng. Pract. 2014, 26, 160–177. [Google Scholar] [CrossRef]
- Ali, Z.; Popov, A.A.; Charles, G. Model Predictive Control with Constraints for a Nonlinear Adaptive Cruise Control Vehicle Model in Transition Manoeuvres. Veh. Syst. Dyn. 2013, 51, 943–963. [Google Scholar] [CrossRef]
- Ye, H.; Jiang, H.; Ma, S.; Tang, B.; Wahab, L. Linear Model Predictive Control of Automatic Parking Path Tracking with Soft Constraints. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419852201. [Google Scholar] [CrossRef]
- Gao, H.; Kan, Z.; Li, K. Robust Lateral Trajectory Following Control of Unmanned Vehicle Based on Model Predictive Control. IEEE/ASME Trans. Mechatron. 2022, 27, 1278–1287. [Google Scholar] [CrossRef]
- Cai, J.; Jiang, H.; Chen, L.; Liu, J.; Cai, Y.; Wang, J. Implementation and Development of a Trajectory Tracking Control System for Intelligent Vehicle. J. Intell. Robot. Syst. 2019, 94, 251–264. [Google Scholar] [CrossRef]
- Deng, X.; Sun, H.; Lu, Z.; Cheng, Z.; An, Y.; Chen, H. Research on Dynamic Analysis and Experimental Study of the Distributed Drive Electric Tractor. Agriculture 2023, 13, 40. [Google Scholar] [CrossRef]
- Gao, F.; Zhao, F.; Zhang, Y. Research on Yaw Stability Control Strategy for Distributed Drive Electric Trucks. Sensors 2023, 23, 7222. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Zhao, X.; Zhu, G.; Shi, P.; Hao, Y.; Kong, L. Adaptive Trajectory Tracking Control Strategy of Intelligent Vehicle. Int. J. Distrib. Sens. Netw. 2020, 16, 1550147720916988. [Google Scholar] [CrossRef]
- Yim, S. Design of Preview Controllers for Active Roll Stabilization. J. Mech. Sci. Technol. 2018, 32, 1805–1813. [Google Scholar] [CrossRef]
- Moshaii, A.A.; Moghaddam, M.M.; Niestanak, V.D. Analytical Model of Hand Phalanges Desired Trajectory for Rehabilitation and Design a Sliding Mode Controller Based on This Model. Modares Mech. Eng. 2020, 20, 129–137. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Parameter | Definition | Value |
|---|---|---|
| wind area | 2.8 | |
| coefficient of air resistance | 0.35 | |
| coefficient of rolling resistance | 0.012 | |
| vehicle mass | 1830 | |
| conversion coefficient of moment of inertia | 1.3 | |
| total transmission efficiency of the drive system | 0.94 |
| Parameter | Value | Unit | Parameter | Value | Unit |
|---|---|---|---|---|---|
| 0.1 | s | −5.5 | m/s2 | ||
| 0.5 | s | 2.5 | m/s2 | ||
| 2 | s | 0 | / | ||
| 7 | m | −1 | / | ||
| 30 | / | 1 | / | ||
| 20 | / | −0.1 | / | ||
| 0 | m/s | 0.1 | / | ||
| 40 | m/s | 0 | / | ||
| −5.5 | m/s2 | 0 | / | ||
| 2.5 | m/s2 | −0.1 | / | ||
| −2.5 | m/s3 | 0.1 | / | ||
| 2.5 | m/s3 | 0.5 | / |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, M.; Tian, J. Longitudinal and Lateral Stability Control Strategies for ACC Systems of Differential Steering Electric Vehicles. Electronics 2023, 12, 4178. https://doi.org/10.3390/electronics12194178
Yang M, Tian J. Longitudinal and Lateral Stability Control Strategies for ACC Systems of Differential Steering Electric Vehicles. Electronics. 2023; 12(19):4178. https://doi.org/10.3390/electronics12194178
Chicago/Turabian StyleYang, Mingfei, and Jie Tian. 2023. "Longitudinal and Lateral Stability Control Strategies for ACC Systems of Differential Steering Electric Vehicles" Electronics 12, no. 19: 4178. https://doi.org/10.3390/electronics12194178
APA StyleYang, M., & Tian, J. (2023). Longitudinal and Lateral Stability Control Strategies for ACC Systems of Differential Steering Electric Vehicles. Electronics, 12(19), 4178. https://doi.org/10.3390/electronics12194178