



Optimal Pattern Synthesis of Linear Array Antennas Using the Nonlinear Chaotic Grey Wolf Algorithm

Abstract
:1. Introduction
2. GWO Algorithm
2.1. Social Hierarchy
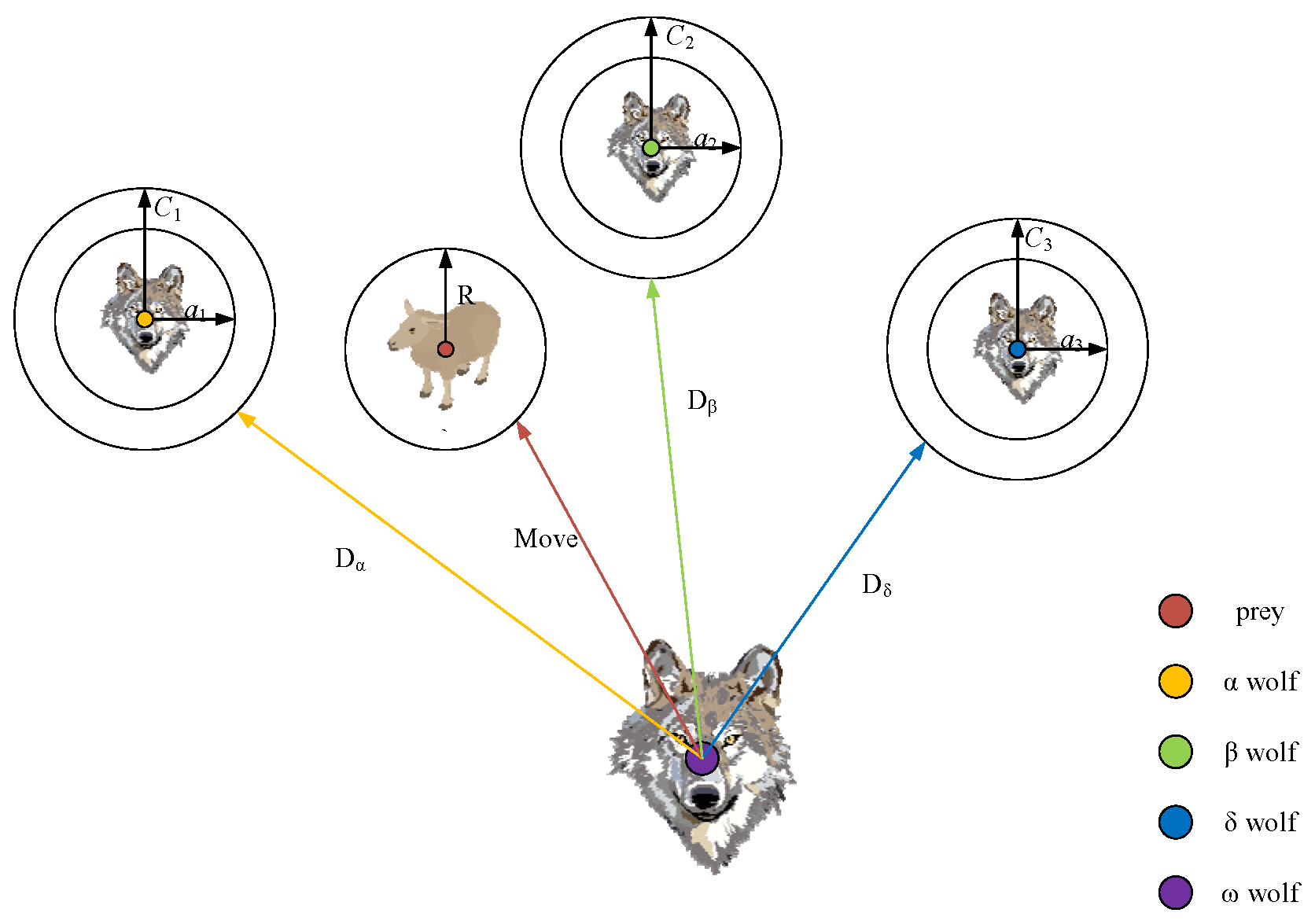
2.2. Encircling Prey
2.3. Hunting and Attacking Prey
3. Nonlinear Chaotic Grey Wolf Optimization (NCGWO) Algorithm
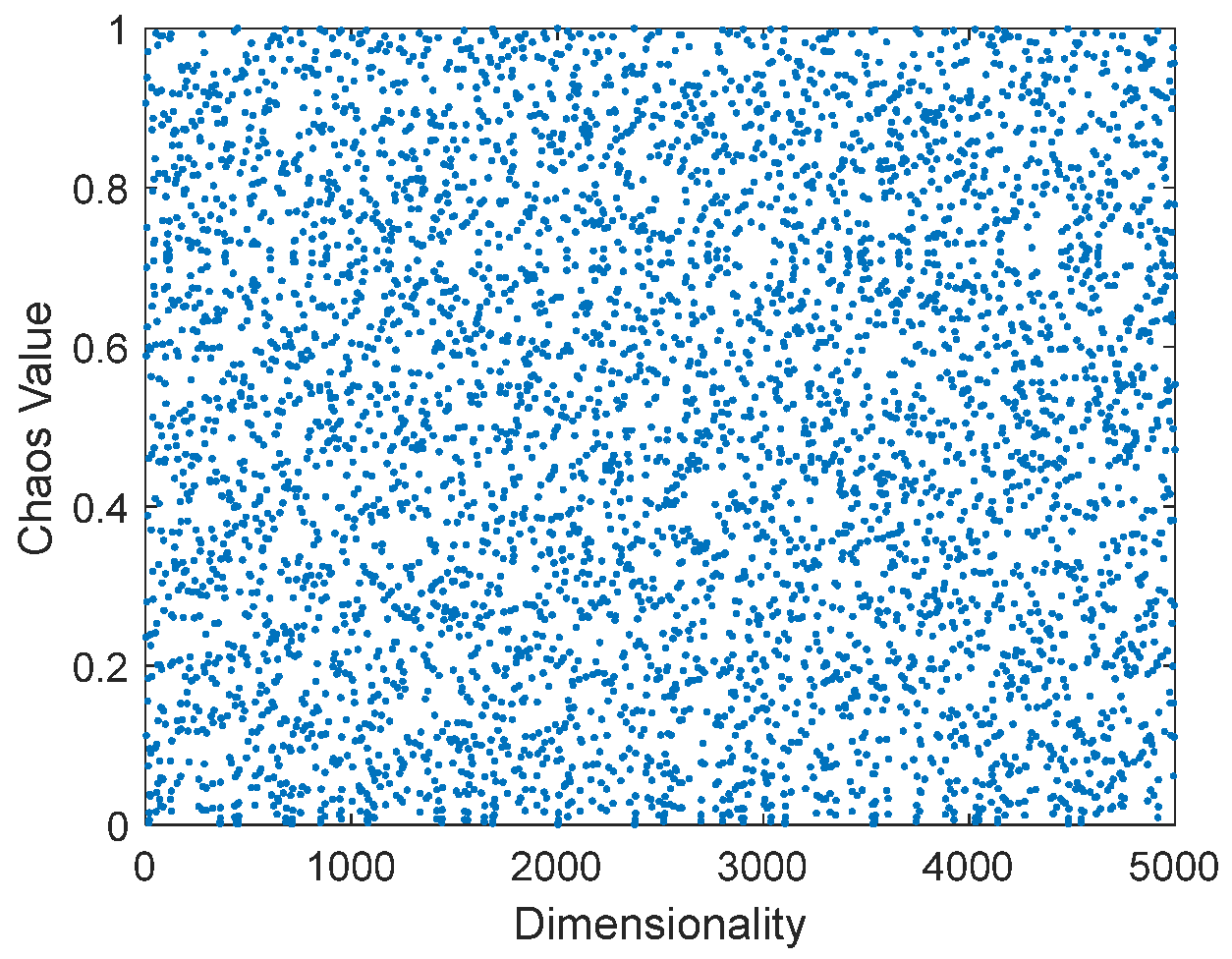
3.1. Logistic-Tent Double Mapping
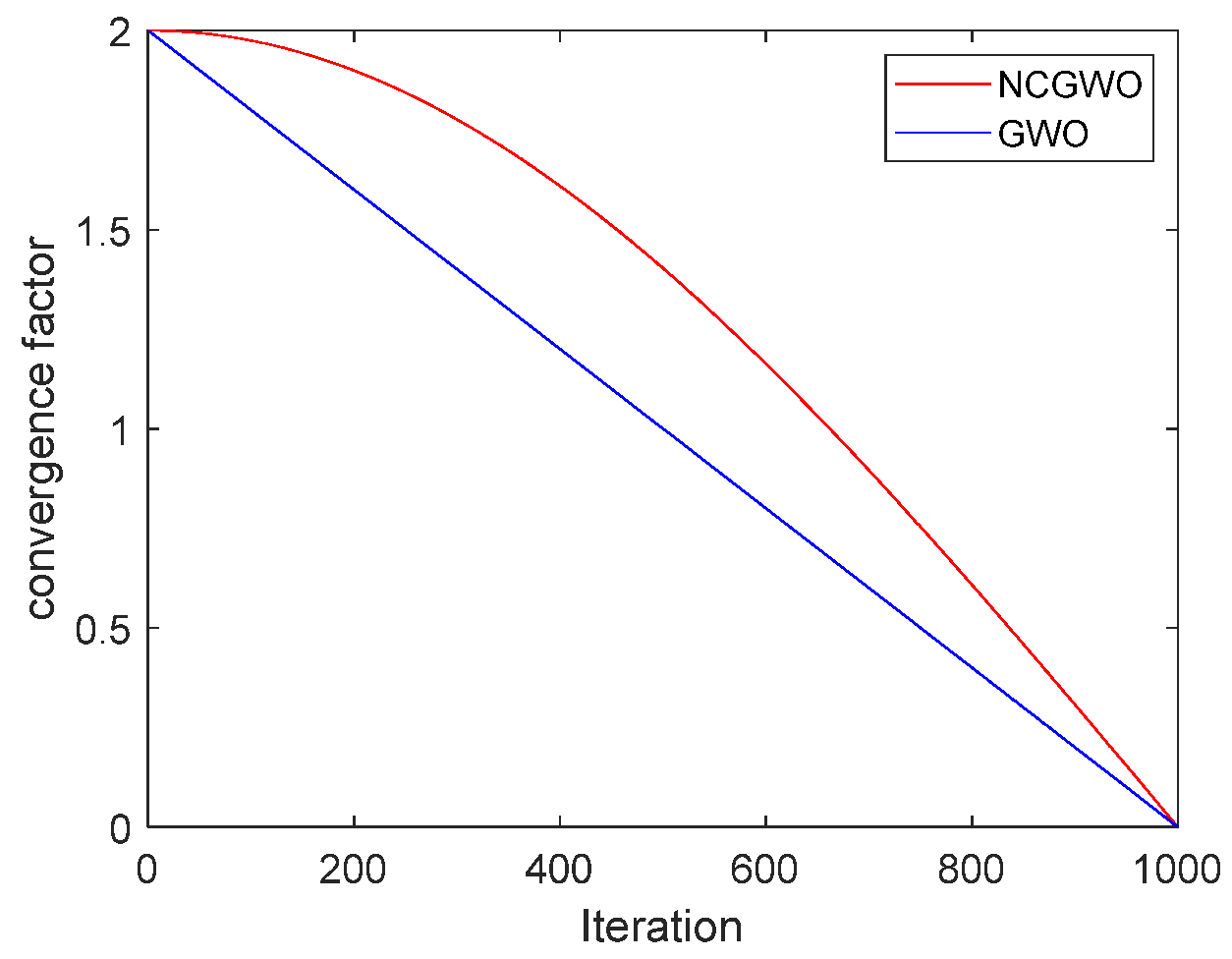
3.2. Nonlinear Variable Speed Convergence Factor
3.3. NCGWO Algorithm Steps
4. NCGWO Performance Analysis
5. Array Antenna
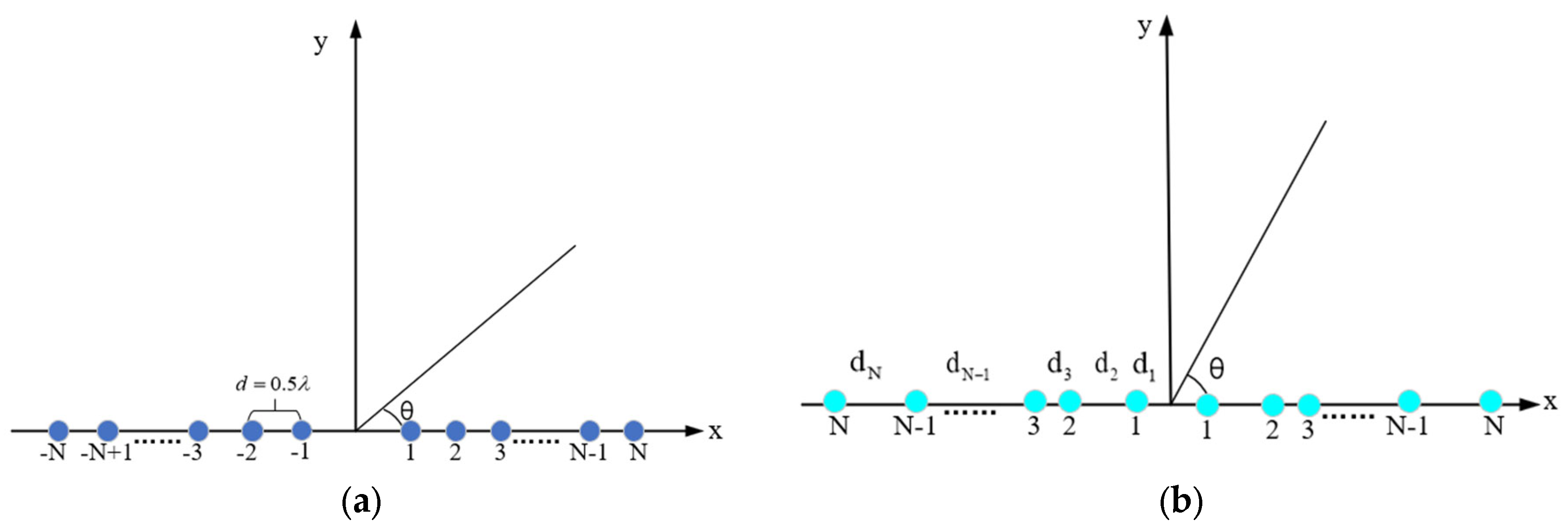
5.1. Linear Array Antennas
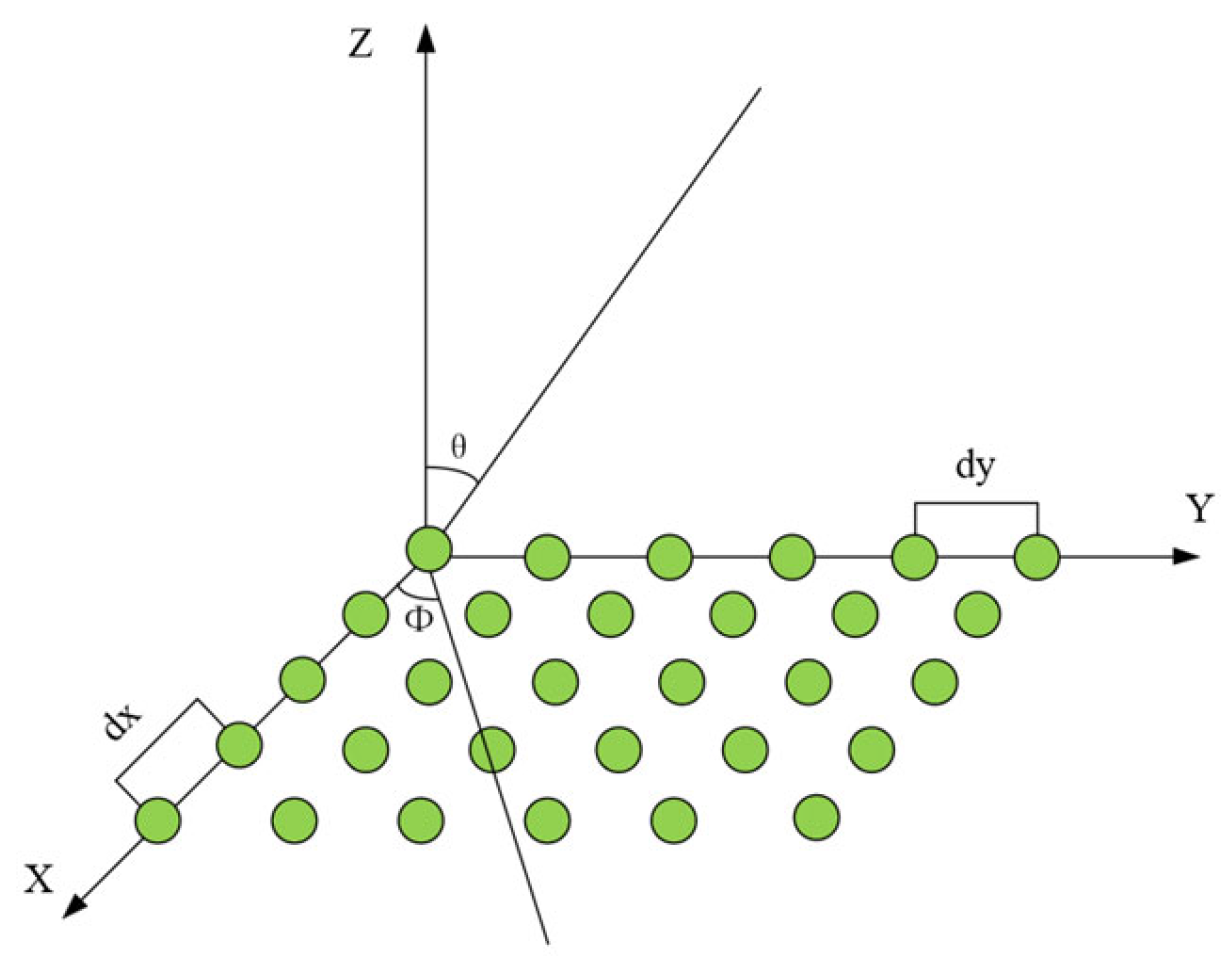
5.2. Planar Array Antenna
5.3. Pattern Synthesis of Array Antennas
6. Data Analysis
6.1. Reducing the First Sidelobe Level (SLL) Nearest to the Main Lobe of a Uniform LAA
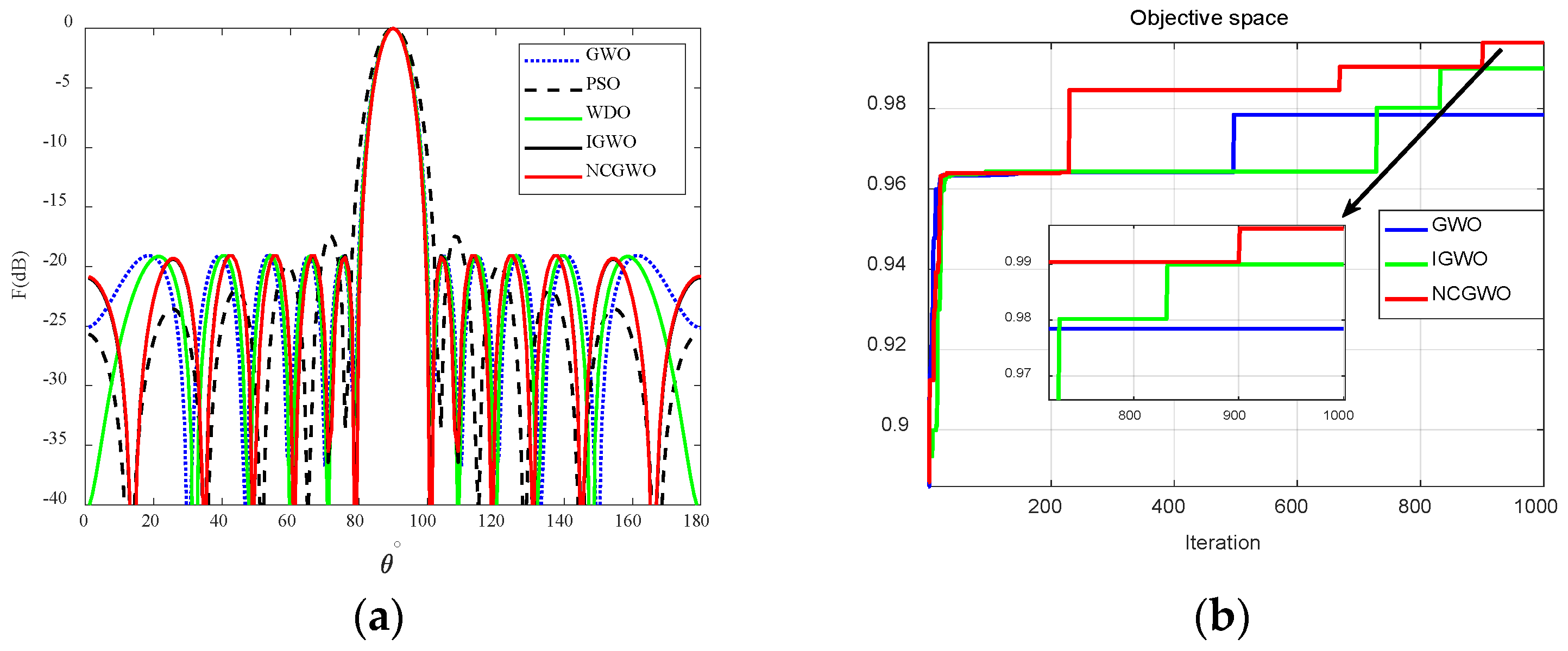
6.2. Array Factor of a 20-Element Uniform Linear Array Antenna with a Lower Notch
6.3. Ten-Element Sparse LAA with Constraint on the Minimum Element Spacing
6.4. Sparse LAA with Constraints on the PSLL Minimization and Null
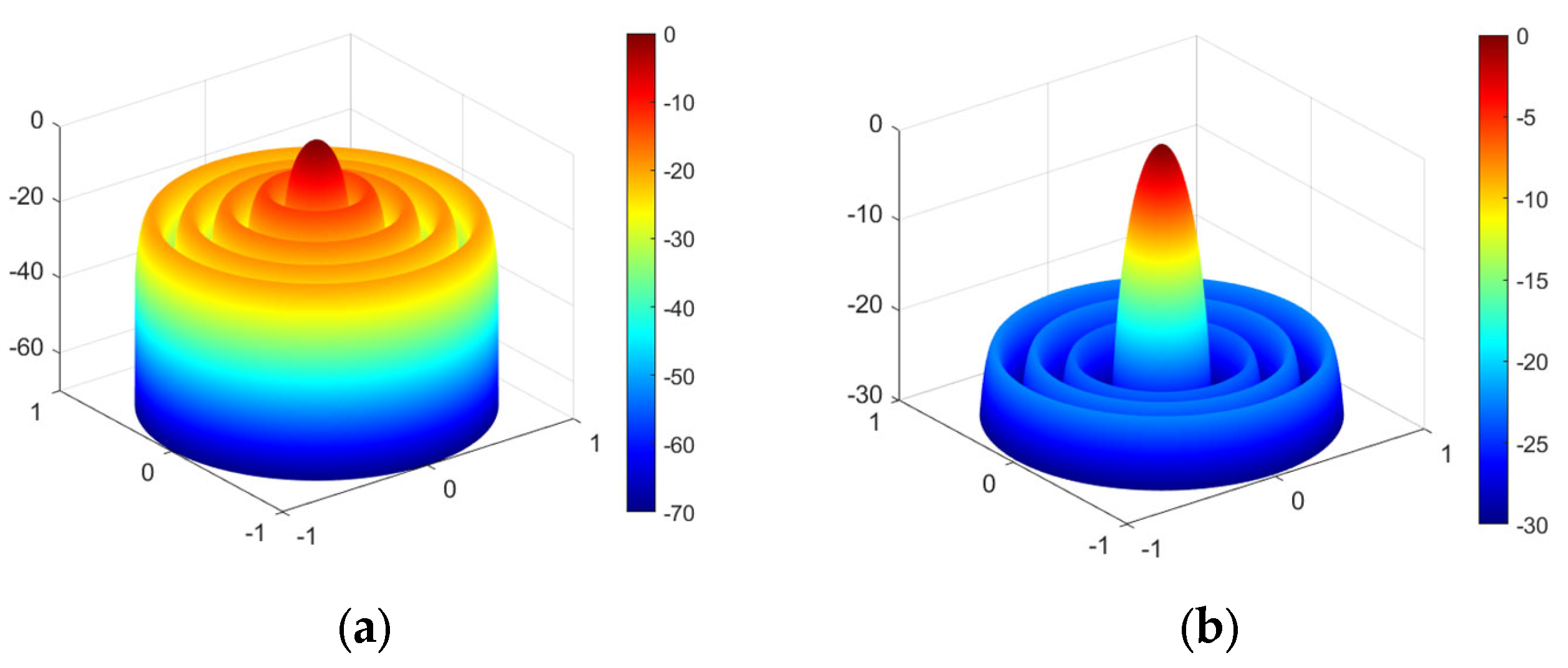
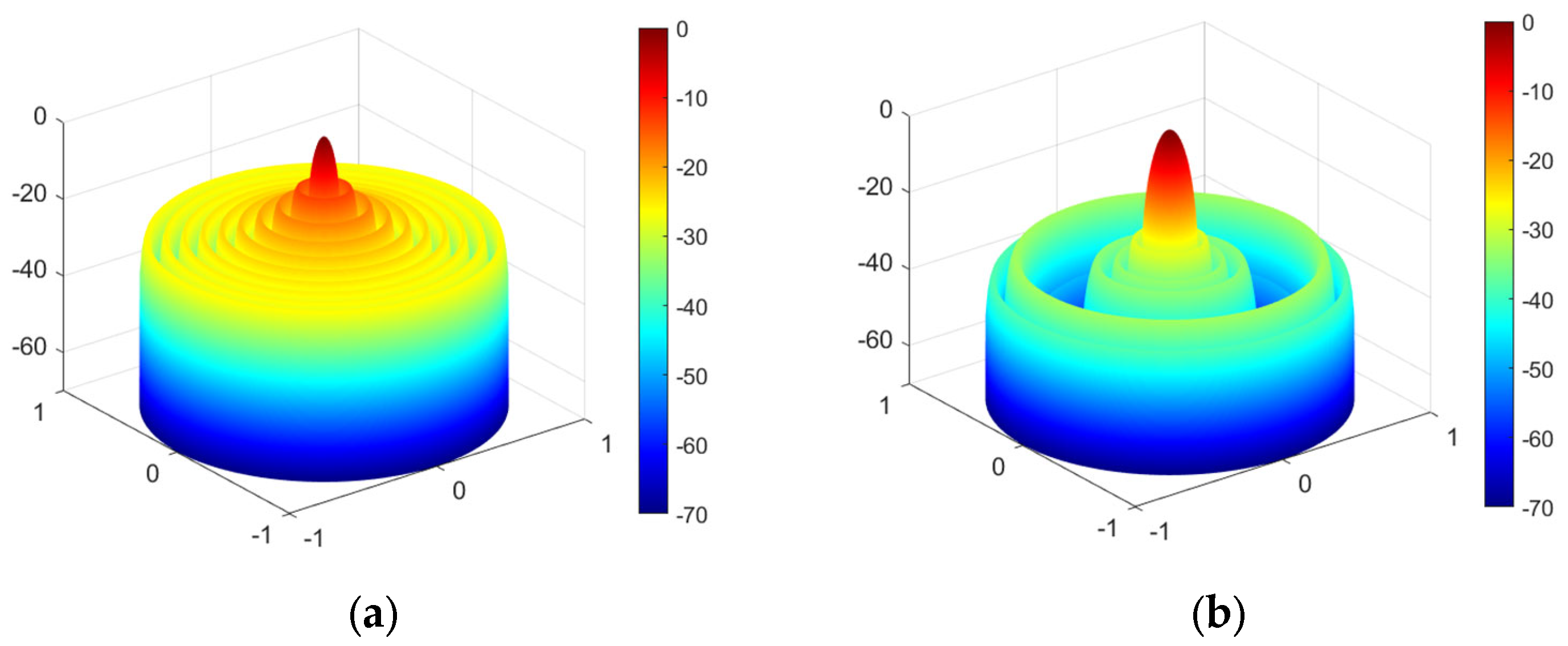
6.5. Simulation Design of Planar Array Antennas
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Balanis, C.A. Antenna Theory and Design; John Wiley & Sons: New York, NY, USA, 1997. [Google Scholar]
- Cheng, Y.-F.; Ding, X.; Shao, W.; Liao, C. A high-gain sparse phased array with wide-angle scanning performance and low sidelobe levels. IEEE Access 2019, 7, 31151–31158. [Google Scholar] [CrossRef]
- Douhi, S.; Islam, T.; Saravanan, R.A.; Eddiai, A.; Das, S.; Cherkaoui, O. Design of a Flexible Rectangular Antenna Array with High Gain for RF Energy Harvesting and Wearable Devices. J. Nano Electron. Phys. 2023, 15, 03010. [Google Scholar] [CrossRef]
- Vescovo, R. Null synthesis by phase control for antenna arrays. Electron. Lett. 2000, 36, 198–199. [Google Scholar] [CrossRef]
- Das, A.; Mandal, D.; Kar, R. An optimal circular antenna array design considering mutual coupling using heuristic approaches. Int. J. RF Microw. Comput. Eng. 2020, 30, 1–14. [Google Scholar] [CrossRef]
- Kandregula, V.R.; Lazaridis, P.I.; Zaharis, Z.D.; Ahmed, Q.Z.; Khan, F.A.; Hafeez, M.; Chochliouros, I.P. Simulation Analysis of a Wideband Antenna on a Drone. In Proceedings of the 2022 IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom), Sofia, Bulgaria, 6–9 June 2022; pp. 288–292. [Google Scholar]
- Sarker, M.A.; Hossain, M.S.; Masud, M.S. Robust beamforming synthesis technique for low side lobe level using taylor excited antenna array. In Proceedings of the 2016 2nd International Conference on Electrical, Computer & Telecommunication Engineering (ICECTE), Rajshahi, Bangladesh, 8–10 December 2016; pp. 1–4. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Expert Syst. Appl. 2016, 47, 106–119. [Google Scholar] [CrossRef]
- Güneş, F.; Tokan, F. Pattern search optimization with applications on synthesis of linear antenna arrays. Expert Syst. Appl. 2010, 37, 4698–4705. [Google Scholar] [CrossRef]
- Singh, U.; Kamal, T. Design of non-uniform circular antenna arrays using biogeography-based optimisation. IET Microw. Antennas Propag. 2011, 5, 1365–1370. [Google Scholar] [CrossRef]
- Kaur, K.; Banga, V.K. ‘Optimization of linear antenna array using firefly algorithm. Int. J. Sci. Eng. Res. 2013, 4, 601–606. [Google Scholar]
- Zhang, Z.; Li, T.; Yuan, F.; Yin, L. Synthesis of Linear Antenna Array Using Genetic Algorithm to Control Side Lobe Level. In Computer Engineering and Networking; Springer: Cham, Switzerland, 2013; pp. 39–46. [Google Scholar]
- Yang, S.; Gan, Y.B.; Qing, A. Antenna-array pattern nulling using a differential evolution algorithm. Int. J. RF Microw. Comput. Eng. 2003, 14, 57–63. [Google Scholar] [CrossRef]
- Abdelkader, E.M.; Moselhi, O.; Marzouk, M.; Zayed, T. An exponential chaotic differential evolution algorithm for optimizing bridge maintenance plans. Autom. Constr. 2022, 134, 104107. [Google Scholar] [CrossRef]
- Saremi, S.; Mirjalili, S.; Lewis, A. Grasshopper optimisation algorithm: Theory and application. Adv. Eng. Softw. 2017, 105, 30–47. [Google Scholar] [CrossRef]
- Xia, G.; Han, Z.; Zhao, B.; Wang, X. Local path planning for unmanned surface vehicle collision avoidance based on modified quantum particle swarm optimization. Complexity 2020, 2020, 3095426. [Google Scholar] [CrossRef]
- Al-Azza, A.A.; Al-Jodah, A.A.; Harackiewicz, F.J. Spider monkey optimization: A novel technique for antenna optimization. IEEE Antennas Wirel. Propag. Lett. 2015, 15, 1016–1019. [Google Scholar] [CrossRef]
- Zervoudakis, K.; Tsafarakis, S. A mayfly optimization algorithm. Comput. Ind. Eng. 2020, 145, 106559. [Google Scholar] [CrossRef]
- Mahto, S.K.; Choubey, A.; Suman, S. Linear array synthesis with minimum side lobe level and null control using wind driven optimization. In Proceedings of the 2015 International Conference on Signal Processing and Communication Engineering Systems, Guntur, India, 2–3 January 2015; pp. 191–195. [Google Scholar]
- Guo, H.; Li, J.; Hao, H.; Song, P.; Zhang, L.; Zhang, X. Synthesis of Linear Antenna Array for Wireless Power Transmission. Synthesis 2023, 2023, 6–27. [Google Scholar] [CrossRef]
- Pavani, T.; Padmavathi, K.; Kumari, C.U.; Ushasree, A. Design of array antennas via atom search optimization. Mater. Today Proc. 2023, 80, 2051–2054. [Google Scholar] [CrossRef]
- Lakhlef, N.; Oudira, H.; Dumond, C. Failure Correction of Linear Antenna Array using Grey Wolf Optimization. In Proceedings of the 2020 6th IEEE Congress on Information Science and Technology (CiSt), Agadir-Essaouira, Morocco, 5–12 June 2021; pp. 384–388. [Google Scholar]
- Zhao, K.X.; Liu, Y.; Hu, K. Optimal Pattern Synthesis of Array Antennas Using Improved Grey Wolf Algorithm. In Proceedings of the 2022 IEEE 12th International Conference on Electronics Information and Emergency Communication (ICEIEC), Beijing, China, 15–17 July 2022; pp. 172–175. [Google Scholar]
- Persohn, K.J.; Povinelli, R.J. Analyzing logistic map pseudorandom number generators for periodicity induced by finite precision floating-point representation. Chaos Solitons Fractals 2012, 45, 238–245. [Google Scholar] [CrossRef]
- Nezhad, S.Y.D.; Safdarian, N.; Zadeh, S.A.H. New method for fingerprint images encryption using DNA sequence and chaotic tent map. Optik 2020, 224, 165661. [Google Scholar] [CrossRef]
- Hua, Z.; Zhu, Z.; Yi, S.; Zhang, Z.; Huang, H. Cross-plane colour image encryption using a two-dimensional logistic tent modular map. Inf. Sci. 2021, 546, 1063–1083. [Google Scholar] [CrossRef]
- Lawnik, M. Combined logistic and tent map. J. Phys. Conf. Ser. 2018, 1141, 012132. [Google Scholar] [CrossRef]
- Panda, G.; Pradhan, P.M.; Majhi, B. IIR system identification using cat swarm optimization. Expert Syst. Appl. 2011, 38, 12671–12683. [Google Scholar] [CrossRef]
- Tan, F.; Zhao, J.; Wang, Q. A grey wolf optimization algorithm with improved nonlinear convergence. Microelectron. Comput. 2019, 36, 89–95. [Google Scholar]
- Li, X.; Luk, K.M. The grey wolf optimizer and its applications in electromagnetics. IEEE Trans. Antennas Propag. 2019, 68, 2186–2197. [Google Scholar] [CrossRef]
- El-Kenawy, E.-S.M.; Mirjalili, S.; Alassery, F.; Zhang, Y.-D.; Eid, M.M.; El-Mashad, S.Y.; Aloyaydi, B.A.; Ibrahim, A.; Abdelhamid, A.A. Novel meta-heuristic algorithm for feature selection, unconstrained functions and engineering problems. IEEE Access 2022, 10, 40536–40555. [Google Scholar] [CrossRef]
- Raji, M.F.; Zhao, H.; Monday, H.N. Fast optimization of sparse antenna array using numerical Green’s function and genetic algorithm. Int. J. Numer. Model. Electron. Netw. Devices Fields 2020, 33, e2544. [Google Scholar] [CrossRef]
- Guo, Q.; Wang, Y.; Li, Y.; Qi, L.; Chernogor, L.F. Pattern synthesis of nonuniform linear antenna array based on FFDM. Digit. Signal Process. 2023, 137, 104022. [Google Scholar] [CrossRef]
- Boopalan, N.; Ramasamy, A.K.; Nagi, F. A Comparison of Faulty Antenna Detection Methodologies in Planar Array. Appl. Sci. 2023, 13, 3695. [Google Scholar] [CrossRef]
- Owoola, E.O.; Xia, K.; Wang, T.; Umar, A.; Akindele, R.G. Pattern synthesis of uniform and sparse linear antenna array using mayfly algorithm. IEEE Access 2021, 9, 77954–77975. [Google Scholar] [CrossRef]
- Wang, H.; Liu, C.; Wu, H.; Li, B.; Xie, X. Optimal pattern synthesis of linear antenna array and broadband design of whip antenna using grasshopper optimization algorithm. Int. J. Antennas Propag. 2020, 2020, 5904018. [Google Scholar] [CrossRef]
- Khodier, M.M.; Christodoulou, C.G. Linear antenna array geometry synthesis with minimum sidelobe level and null control using particle swarm optimization. IEEE Trans. Antennas Propag. 2005, 53, 2674–2679. [Google Scholar] [CrossRef]
- Bayraktar, Z.; Komurcu, M.; Bossard, J.A.; Werner, D.H. The wind driven optimization technique and its application in electromagnetics. IEEE Trans. Antennas Propag. 2013, 61, 2745–2757. [Google Scholar] [CrossRef]
- Pappula, L.; Ghosh, D. Linear antenna array synthesis using cat swarm optimization. AEU Int. J. Electron. Commun. 2014, 68, 540–549. [Google Scholar] [CrossRef]
- Aboul-Seoud, A.K.; Mahmoud, A.K.; Hafez, A.E.D.S. A sidelobe level reduction (SLL) for planar array antennas with −30 dB attenuators weight precision. Aerosp. Sci. Technol. 2010, 14, 316–320. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NCGWO | GWO | |
|---|---|---|
| Number 1 | Logistic-tent double mapping generating initial populations | Randomly generated initial populations |
| Formula | ||
| Reason 1 | The GWO algorithm suffers from a lack of diversity in the initial population due to the random generation of individuals. This limitation hampers the algorithm’s search flexibility. To address this, logistic-tent dual chaotic mapping methods are employed to enhance the initial population’s diversity, optimizing the global search process and increasing the algorithm’s search flexibility. | |
| Number 2 | Nonlinear variable speed convergence factor | Linear convergence factor |
| Formula | ||
| Reason 2 | The a plays an important role in balancing the exploration and exploitation of the candidate’s individual search. The search process of the GWO algorithm is nonlinear and complicated; the linear convergence factor cannot balance the global and local search ability. The better performance would be obtained if there was a nonlinear variable speed convergence factor. | |
| F | Expression | Boundaries | Optimal Solution i.e., |
|---|---|---|---|
| F1 | |||
| F2 | |||
| F3 | |||
| F4 |
| Objective Function | Algorithm | Min | Mean | SD |
|---|---|---|---|---|
| NCGWO | 7.6893 × 10−99 | 2.6133 × 10−100 | 1.4032 × 10−99 | |
| GWO | 2.60 × 10−73 | 3.55 × 10−71 | 1.18 × 10−70 | |
| PSO | 5.01 × 10−17 | 5.96 × 10−15 | 2.54 × 10−14 | |
| GA | 2.23 × 10−31 | 1.3 × 10−3 | 0.105 | |
| NCGWO | 27.10 | 26.01 | 0.59 | |
| GWO | 34.45 | 36.40 | 0.75 | |
| PSO | 10.574 | 54.55 | 56.00 | |
| GA | 23.89 | 284.04 | 255.57 | |
| NCGWO | 0 | 0 | 0 | |
| GWO | 0 | 2.27 × 10−15 | 1.11 × 10−14 | |
| PSO | 21.89 | 77.89 | 24.37 | |
| GA | 11.94 | 35.97 | 12.26 | |
| NCGWO | 0 | 0 | 0 | |
| GWO | 0 | 6.24 × 10−4 | 2.52 × 10−3 | |
| PSO | 0 | 1.48 × 10−2 | 2.38 × 10−2 | |
| GA | 0 | 1.7 × 10−3 | 1.46 × 10−2 |
| Algorithm | Optimized Amplitude Current | Peak SLL (dB) | Near SLL (dB) | Execution Time (s) |
|---|---|---|---|---|
| GWO | 0.9531, 0.9452, 0.5549, 0.4634, 0.5083 | −16.8570 | −31.8400 | 3.1800 |
| IGWO | 1.0000, 0.8376, 0.6409, 0.4349, 0.4768 | −20.2761 | −31.9129 | 2.4520 |
| PSO | 0.9242, 0.7997, 0.6030, 0.3814, 0.4766 | −19.4041 | −32.4200 | 2.9300 |
| MA | 1.0000, 0.8585, 0.6383, 0.4253, 0.5070 | −20.0367 | −32.4500 | 9.3700 |
| NCGWO | 1.0000, 0.8645, 0.6455, 0.4105, 0.3999 | −22.4420 | −36.4027 | 0.8290 |
| Algorithm | Optimized Amplitude Current | Peak SLL (dB) | Notch Depth (dB) | Execution Time (s) |
|---|---|---|---|---|
| GWO | 0.8785, 0.9057, 0.8858, 0.7978, 0.6418 0.5180, 0.3663, 0.3101, 0.1407, 0.0939 | −26.9677 | 62.6431 | 3.075 |
| IGWO | 0.9795, 0.9716, 0.9386, 0.7924, 0.7202 0.5613, 0.5115, 0.3950, 0.2175, 0.1190 | −27.0144 | −62.1436 | 2.5920 |
| SMO | 1.0000, 0.9990, 1.0000, 0.8360, 0.6430 0.6540, 0.4770, 0.5970, 0.2580, 0.2150 | −24.1000 | −56.7000 | 9.612 |
| GOA | 1.0000, 0.9860, 0.9900, 0.7960, 0.7360 0.5630, 0.5270, 0.4470, 0.2430, 0.1510 | −27.7000 | −61.2000 | 7.714 |
| NCGWO | 1.0000, 0.9636, 0.9417, 0.7958, 0.7000 0.5752, 0.4474, 0.3626, 0.1699, 0.1008 | −28.1781 | −64.3883 | 1.998 |
| Algorithm | Optimized Element Position | Peak SLL (dB) | Execution Time (s) |
|---|---|---|---|
| GWO | 0.2204, 0.7078, 1.2023, 1.8266, 2.5468 | −19.0700 | 4.9820 |
| IGWO | 0.2234, 0.7196, 1.2224, 1.8604, 2.5966 | −19.0712 | 4.3400 |
| PSO | 0.2515, 0.5550, 1.0650, 1.5000, 2.1100 | −17.4100 | 9.5150 |
| WDO | 0.2233, 0.7179, 1.2221, 1.8591, 2.5936 | −19.0500 | 6.2090 |
| NCGWO | 0.2298, 0.7401, 1.2613, 1.9205, 2.6785 | −19.0848 | 3.3540 |
| Algorithm | Optimized Element Position | Peak SLL (dB) | Null Depth (dB) |
|---|---|---|---|
| ACO | 0.1500, 0.7500, 1.0500, 1.7500, 2.2500, 2.5500, 2.9500, 3.7500, 4.1500, 4.5500, 4.7500, 5.3500 6.0500, 7.0500, 7.7500, 8.4500 | −17.0990 | −50 |
| CSO | 0.2833, 0.6830, 1.1929, 1.5199 1.9768, 2.3247, 2.6886, 3.1362 3.4848, 3.9538, 4.3822, 4.9252 5.4817, 6.2091, 7.0412, 7.7500 | −18.1562 | −80 |
| GWO | 0.1943, 0.7407, 1.2492, 1.7476 2.2413, 2.7143, 2.9998, 3.4515 3.7540, 4.2759, 4.7500, 5.2556 5.7518, 6.4559, 7.2500, 8.0000 | −15.1287 | −106 |
| IGWO | 0.2505, 0.6570, 1.0574, 1.4622 1.9027, 2.3433, 2.7637, 3.1672 3.5856, 4.0330, 4.5951, 5.0225 5.5743, 6.5045, 7.3101, 8.2594 | −19.0584 | −108 |
| NCGWO | 0.2500, 0.6500, 1.0525, 1.4619 1.8950, 2.3419, 2.7771, 3.2000 3.6361, 4.1108, 4.6883, 5.2370 5.8100, 6.9328, 7.6841, 8.3345 | −20.9203 | −116 |
| Algorithm | Peak SLL (dB) | Mainbeam (°) |
|---|---|---|
| Gaussian | −22.8200 | 12 |
| Kaiser | −22.0330 | 12 |
| Hamming | −22.820 | 12 |
| Blackman | −32.0070 | 16 |
| GWO | −27.5697 | 12 |
| IGWO | −30.5697 | 12 |
| NCGWO | −34.8303 | 12 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, K.; Liu, Y.; Hu, K. Optimal Pattern Synthesis of Linear Array Antennas Using the Nonlinear Chaotic Grey Wolf Algorithm. Electronics 2023, 12, 4087. https://doi.org/10.3390/electronics12194087
Zhao K, Liu Y, Hu K. Optimal Pattern Synthesis of Linear Array Antennas Using the Nonlinear Chaotic Grey Wolf Algorithm. Electronics. 2023; 12(19):4087. https://doi.org/10.3390/electronics12194087
Chicago/Turabian StyleZhao, Kunxia, Yan Liu, and Kui Hu. 2023. "Optimal Pattern Synthesis of Linear Array Antennas Using the Nonlinear Chaotic Grey Wolf Algorithm" Electronics 12, no. 19: 4087. https://doi.org/10.3390/electronics12194087
APA StyleZhao, K., Liu, Y., & Hu, K. (2023). Optimal Pattern Synthesis of Linear Array Antennas Using the Nonlinear Chaotic Grey Wolf Algorithm. Electronics, 12(19), 4087. https://doi.org/10.3390/electronics12194087