
CA-LSTM: An Improved LSTM Trajectory Prediction Method Based on Infrared UAV Target Detection

Abstract
:1. Introduction
2. Related Work
2.1. UAV Target Recognition Algorithm
2.2. UAV Trajectory Prediction Algorithm
3. System Composition
3.1. UAV Target Recognition Method
3.2. UAV Trajectory Prediction Method
3.2.1. Long Short-Term Memory
3.2.2. Attention Mechanism
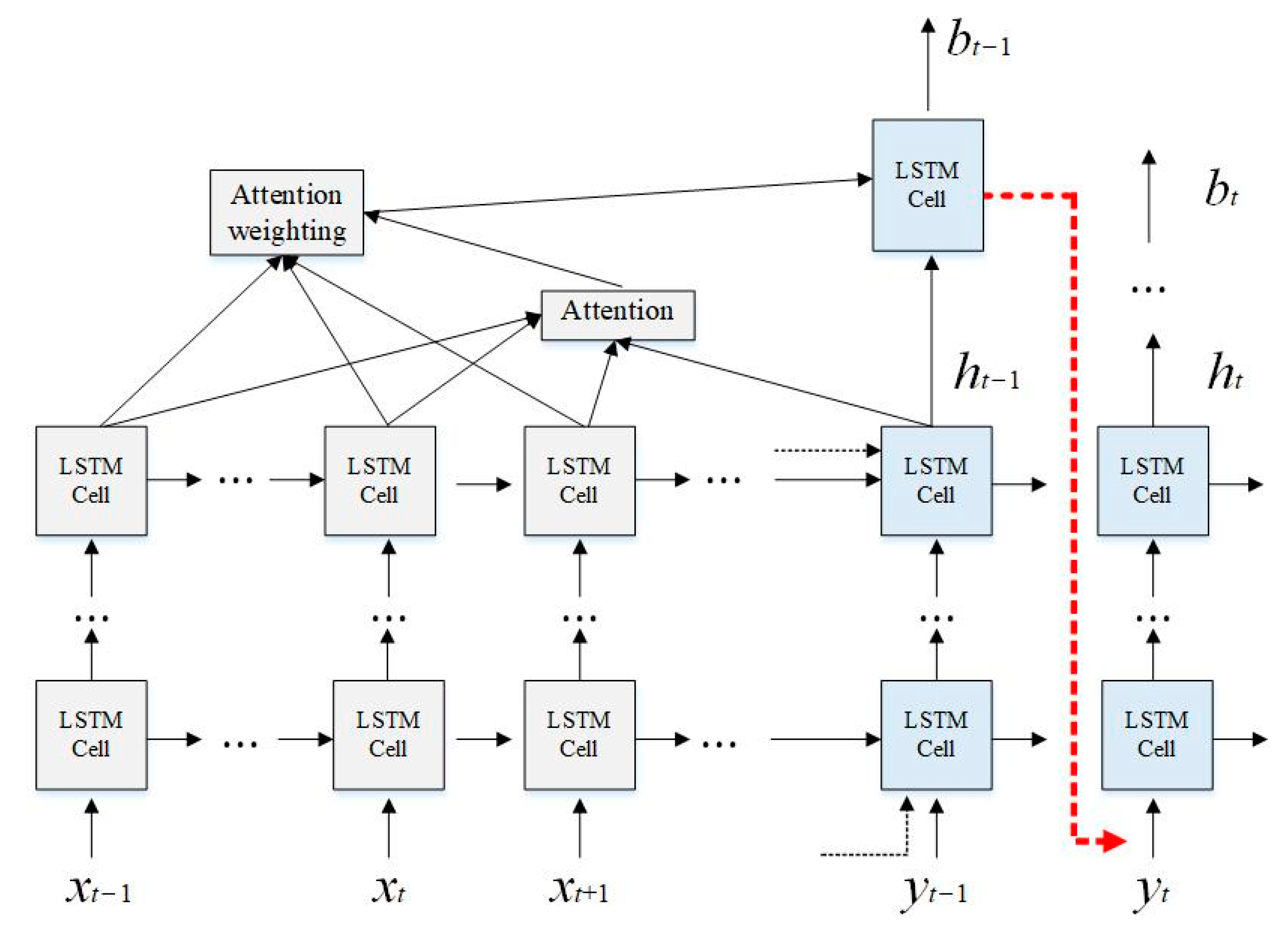
3.2.3. Trajectory Prediction Model Architecture
| Algorithm 1: CA-LSTM trajectory prediction network. |
| Known: |
| The model uses one hidden layer with 64 neurons per layer. |
| The specific input sequence is denoted as . |
| Step: |
|
|
|
|
|
4. Experiment
4.1. Experiment Setting
4.1.1. Experimental Environment
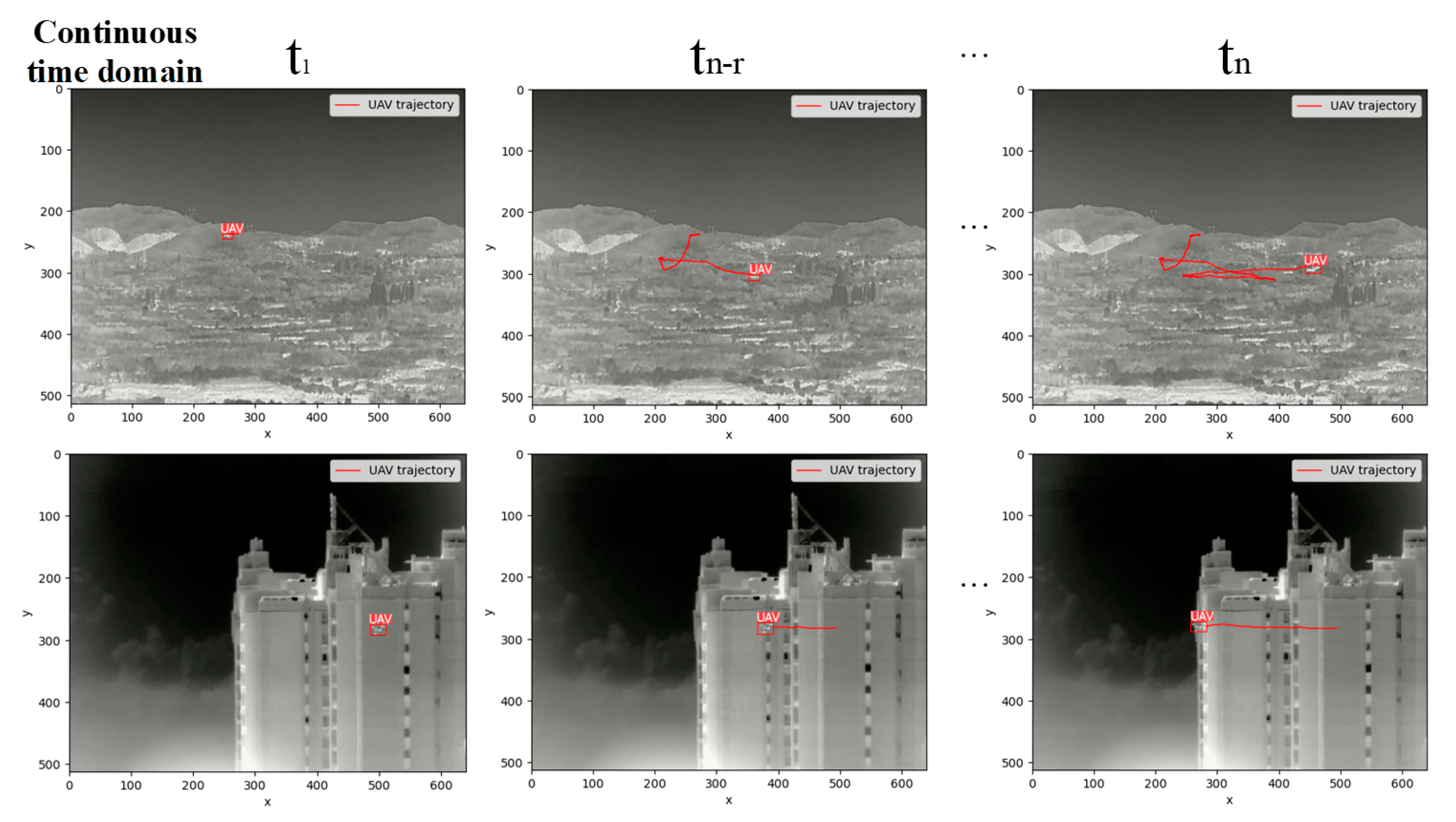
4.1.2. Dataset Building
4.2. Comparative Experiment
4.2.1. Object Detection Network
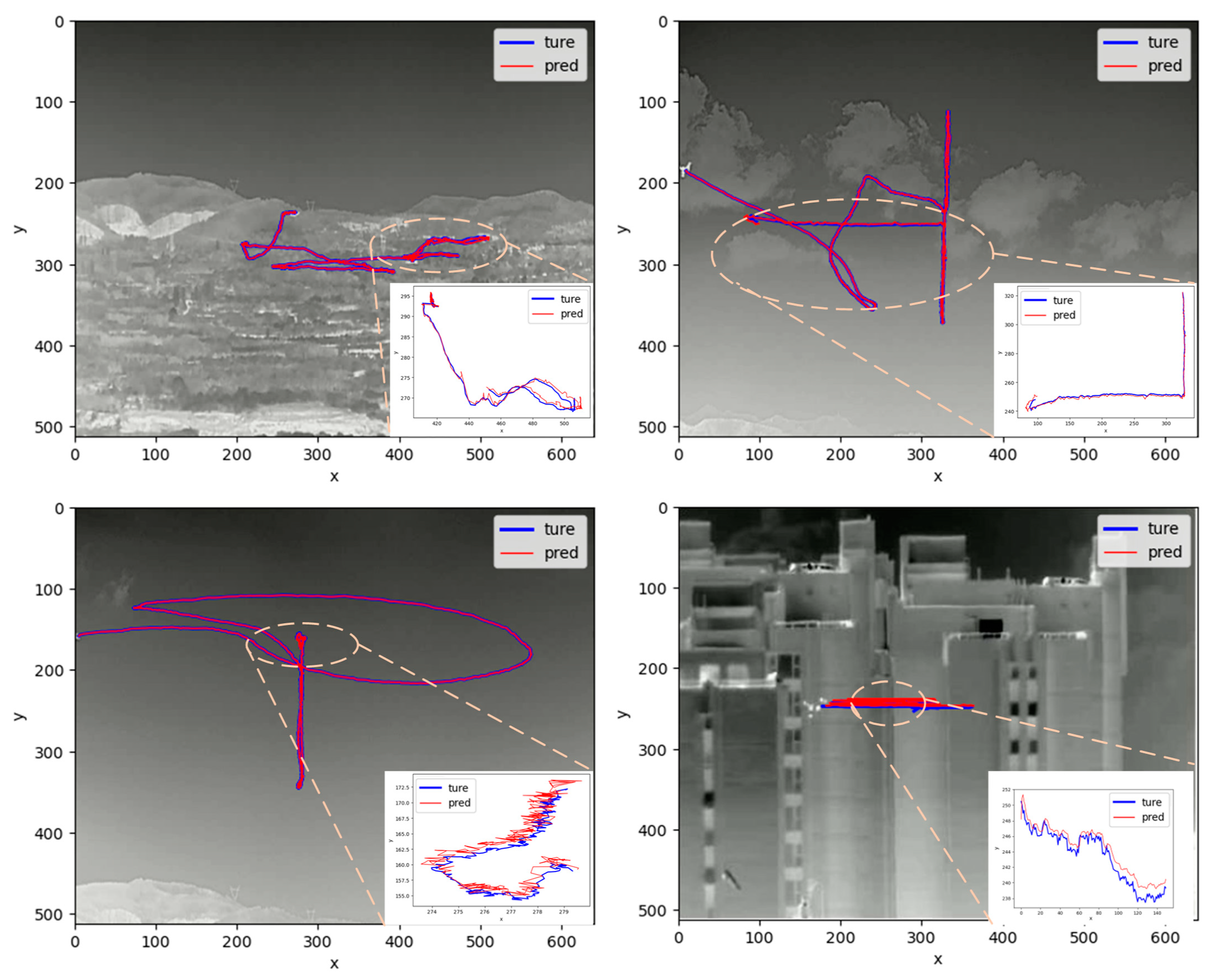
4.2.2. Trajectory Prediction Network
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, F.; Gao, C.; Chen, F.; Meng, D.; Zuo, W.; Gao, X. Infrared Small-Dim Target Detection with Transformer under Complex Backgrounds. arXiv 2021, arXiv:2109.14379. [Google Scholar]
- Guo, S.S. Development status of anti-drone technology and products. Mil. Dig. 2016, 377, 36–39. [Google Scholar]
- Wei, Q.Y. Research on Low, Slow and Small Target Passive Detection Based on External Radiation Source. Master’s Thesis, Nanjing University of Science and Technology, Nanjing, China, 2020. [Google Scholar] [CrossRef]
- Ma, Y. Research on infrared weak and small target detection technology based on SSD framework. Laser Infrared 2021, 51, 1342–1347. [Google Scholar]
- Hui, W.Y. A dataset of small and weak aircraft target detection and tracking in infrared images under ground/air background. China Sci. Data 2020, 5, 291–302. [Google Scholar]
- Zuo, Z.; Tong, X.; Wei, J.; Su, S.; Wu, P.; Guo, R.; Sun, B. AFFPN: Attention Fusion Feature Pyramid Network for Small Infrared Target Detection. Remote Sens. 2022, 14, 3412. [Google Scholar] [CrossRef]
- Li, M.; Ning, D.J.; Guo, J.C. CNN-LSTM model based on attention mechanism and its application. Comput. Eng. Appl. 2019, 55, 20–27. [Google Scholar]
- Qiao, S.J.; Shen, D.; Wang, X.; Han, N.; Zhu, W. A Self-Adaptive Parameter Selection Trajectory Prediction Approach via Hidden Markov Models. IEEE Trans. Intell. Transp. Syst. 2015, 16, 284–296. [Google Scholar] [CrossRef]
- Wu, Q.G. Research on Mission-Oriented Cooperative UAV Trajectory Prediction Technology. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2019. [Google Scholar]
- Qu, X.T.; Zhuang, D.C.; Xie, H.B. Low, slow and small" drone detection method. Command. Control Simul. 2020, 42, 128–135. [Google Scholar]
- Zhang, M.; Zhang, R.; Yang, Y. ISNet: Shape Matters for Infrared Small Target Detection. In Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 19–24 June 2022; pp. 867–876. [Google Scholar]
- Li, X.Y. Application of UAV countermeasure technology and equipment in low-altitude airspace management. China Secur. 2023, 202, 31–36. [Google Scholar]
- Jiang, C.C.; Ren, H.H. Object detection from UAV thermal infrared images and videos using YOLO models. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 1569–8432. [Google Scholar] [CrossRef]
- Xue, S. Image recognition method of anti UAV system based on convolutional network. Infrared Laser Eng. 2020, 49, 250–257. [Google Scholar]
- Li, J. Perceptual generative adversarial networks for small object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1222–1230. [Google Scholar]
- Cai, W. Detection of weak and small targets in infrared image under complex background. J. Appl. Opt. 2021, 42, 643–650. [Google Scholar]
- Wu, X.; Li, W.; Hong, D.; Tao, R.; Du, Q. Deep Learning for Unmanned Aerial Vehicle-Based Object Detection and Tracking: A survey. Geosci. Remote Sens. 2022, 10, 91–124. [Google Scholar] [CrossRef]
- Zhao, Y. Research on UAV Target Detection Method Based on Infrared and Visible Light Image Fusion. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2019; pp. 23–35. [Google Scholar]
- Arafat, M.Y.; Alam, M.M.; Moh, S. Vision-Based Navigation Techniques for Unmanned Aerial Vehicles: Review and Challenges. Drones 2023, 7, 89. [Google Scholar] [CrossRef]
- Ma, Q. Low-altitude UAV detection and recognition method based on optimized YOLOv3. Laser Prog. Optoelectron. 2019, 56, 279–286. [Google Scholar]
- Zheng, L.; Peng, Y.P. Infrared Small UAV Target Detection Algorithm Based on Enhanced Adaptive Feature Pyramid Networks. IEEE Access 2022, 10, 115988–115995. [Google Scholar] [CrossRef]
- Zhao, X.; Xia, Y.; Zhang, W.; Zheng, C.; Zhang, Z. YOLO-ViT-Based Method for Unmanned Aerial Vehicle Infrared Vehicle Target Detection. Remote Sens. 2023, 15, 3778. [Google Scholar] [CrossRef]
- Xu, X.; Sun, Y.W. A Novel Infrared Small Target Detection Algorithm Based on Deep Learning. In Proceedings of the 4th International Conference on Advances in Image Processing (ICAIP’20), Chengdu, China, 13–15 November 2020; Association for Computing Machinery: New York, NY, USA, 2021; pp. 8–14. [Google Scholar] [CrossRef]
- Li, H.; Deng, L. Enhanced YOLO v3 tiny network for real-time ship detection from visual image. IEEE Access 2021, 9, 16692–16706. [Google Scholar] [CrossRef]
- Yu, K. Research on Infrared Target Detection and Tracking Methods in Anti-UAV Systems. Master’s Thesis, National University of Defense Technology, Changsha, China, 2017. [Google Scholar]
- Wang, Y.H. A brief discussion on how drones and anti-drone technologies complement each other in the 5G era. China Secur. 2020, 175, 78–81. [Google Scholar]
- Zhang, D.D. Research on the development status and anti-swarm strategy of UAV swarms abroad. FlyingMissiles 2021, 438, 56–62. [Google Scholar] [CrossRef]
- Lu, J.X. Short-term load forecasting method based on CNN-LSTM mixed neural network model. Autom. Electr. Power Syst. 2019, 43, 131–137. [Google Scholar]
- Yang, J.; Xu, J.; Xu, M. Predicting next location using a variable order Markov model. In Proceedings of the 5th ACM SIGSPATIAL International Workshop on GeoStreaming, Dallas, TX, USA, 4 November 2014; pp. 37–42. [Google Scholar]
- Wei, Y.; You, X. Multiscale patch-based contrast measure for small infrared target detection. Pattern Recognit. 2016, 58, 216–226. [Google Scholar] [CrossRef]
- Tan, W.; Lu, B.C.; Huang, M.L. Neural networks combined with genetic algorithms are used for track prediction. J. Chongqing Jiao Tong Univ. (Nat. Sci. Ed.) 2010, 29, 147–150. [Google Scholar]
- Zhang, T.; Guo, J.L.; Xu, X.M.; Jun, W. Fighter Air Combat Trajectory Prediction Based on Elman Neural Network. Flight Mech. 2018, 36, 86–91. [Google Scholar]
- Yang, R.N.; Yue, L.F.; Song, M. UAV Trajectory Prediction Model and Simulation Based on Bi-LSTM. Adv. Aeronaut. Eng. 2020, 11, 77–84. [Google Scholar] [CrossRef]
- Teng, F.; Liu, S.; Song, Y.F. Bi-LSTM-Attention: A Tactical Intent Recognition Model for Air Targets. Aviat. Weapons 2021, 28, 24–32. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Variable/Parameter |
|---|---|
| Input weight | |
| Bias term | |
| Forgetting gate parameter | |
| Nonlinear mapping of hyperbolic tangent functions | |
| Alignment score | |
| The hidden state of the encoder at moment j | |
| Attention weights | |
| Context vector | |
| The hidden state of Decoder at time t | |
| Conditional probability output |
| Attention Mechanism |
|---|
|
|
|
|
|
| Environment Configuration | Version |
|---|---|
| CPU | Intel Core i9-12900H @ 2.50 GHz |
| GPU | NVIDIA GeForce RTX 3070 |
| Operating system | Windows 11 |
| Programming language | Python 3.9 |
| Parameter | Value |
|---|---|
| Training epoch | 100 |
| Batch size | 16 |
| Initial learning rate | 10−4 |
| Parameter | Value |
|---|---|
| Time step | 16 |
| Optimizer | Adam |
| Learning rate | Dynamic adjustment |
| Method | mAP@0.5 | mAP@0.5:0.95 |
|---|---|---|
| Yolov5 | 0.871 | 0.503 |
| Improved Yolov5 (ours) | 0.906 | 0.519 |
| Method | MAPE | MSE |
|---|---|---|
| LSTM | 0.1044 | 3.2470 |
| CNN-LSTM | 0.0231 | 3.1960 |
| CA-LSTM (ours) | 0.0101 | 3.0089 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dang, Z.; Sun, B.; Li, C.; Yuan, S.; Huang, X.; Zuo, Z. CA-LSTM: An Improved LSTM Trajectory Prediction Method Based on Infrared UAV Target Detection. Electronics 2023, 12, 4081. https://doi.org/10.3390/electronics12194081
Dang Z, Sun B, Li C, Yuan S, Huang X, Zuo Z. CA-LSTM: An Improved LSTM Trajectory Prediction Method Based on Infrared UAV Target Detection. Electronics. 2023; 12(19):4081. https://doi.org/10.3390/electronics12194081
Chicago/Turabian StyleDang, Zhaoyang, Bei Sun, Can Li, Shudong Yuan, Xiaoyue Huang, and Zhen Zuo. 2023. "CA-LSTM: An Improved LSTM Trajectory Prediction Method Based on Infrared UAV Target Detection" Electronics 12, no. 19: 4081. https://doi.org/10.3390/electronics12194081
APA StyleDang, Z., Sun, B., Li, C., Yuan, S., Huang, X., & Zuo, Z. (2023). CA-LSTM: An Improved LSTM Trajectory Prediction Method Based on Infrared UAV Target Detection. Electronics, 12(19), 4081. https://doi.org/10.3390/electronics12194081