
Improved LSTM Neural Network-Assisted Combined Vehicle-Mounted GNSS/SINS Navigation and Positioning Algorithm


Abstract
:1. Introduction
2. Relevant Basic Theory
2.1. Kalman Filtering
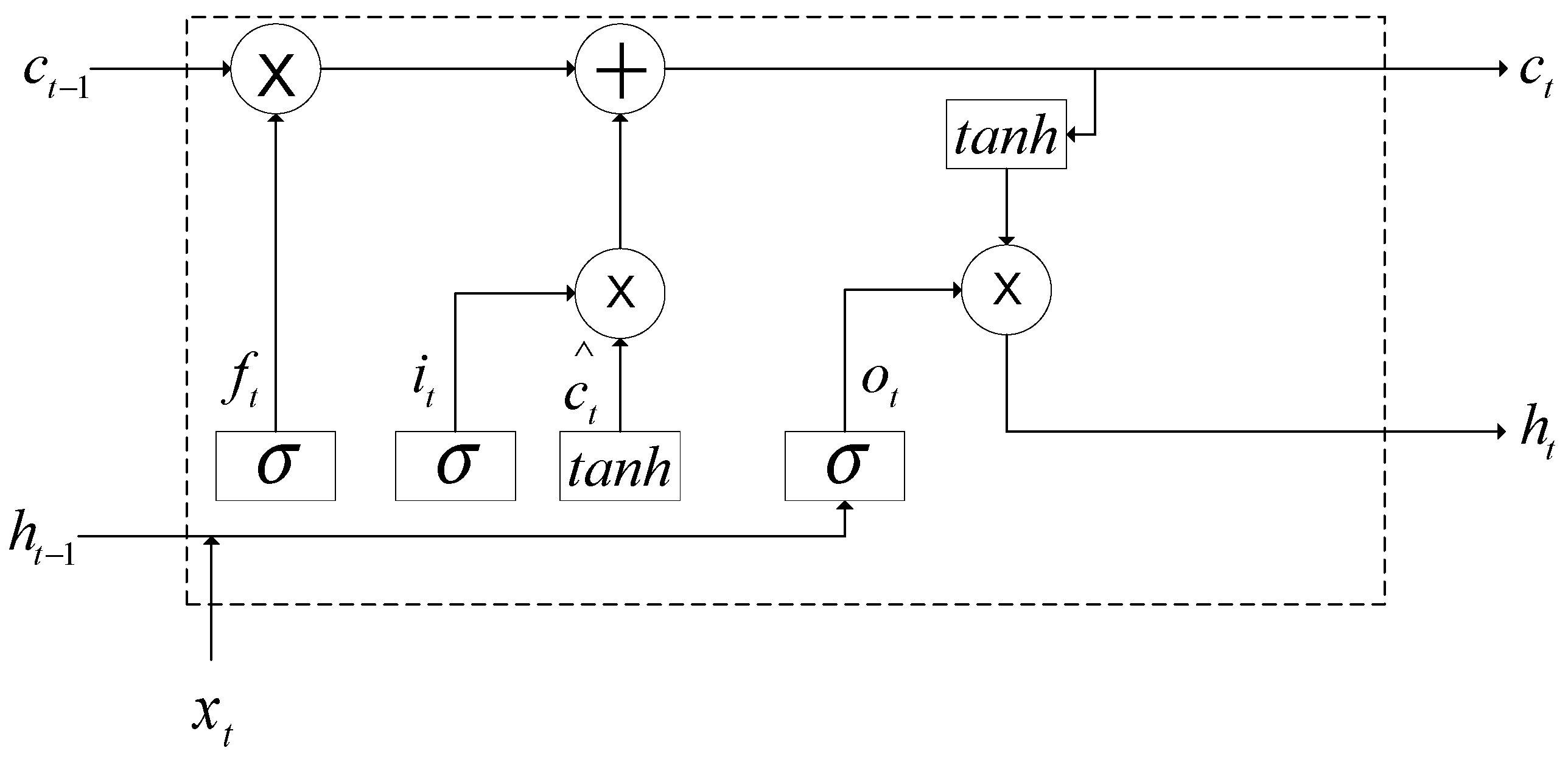
2.2. Long- and Short-Term Memory Network LSTM Model
3. Design of GNSS/SINS Combined Navigation Algorithm Scheme with Improved LSTM
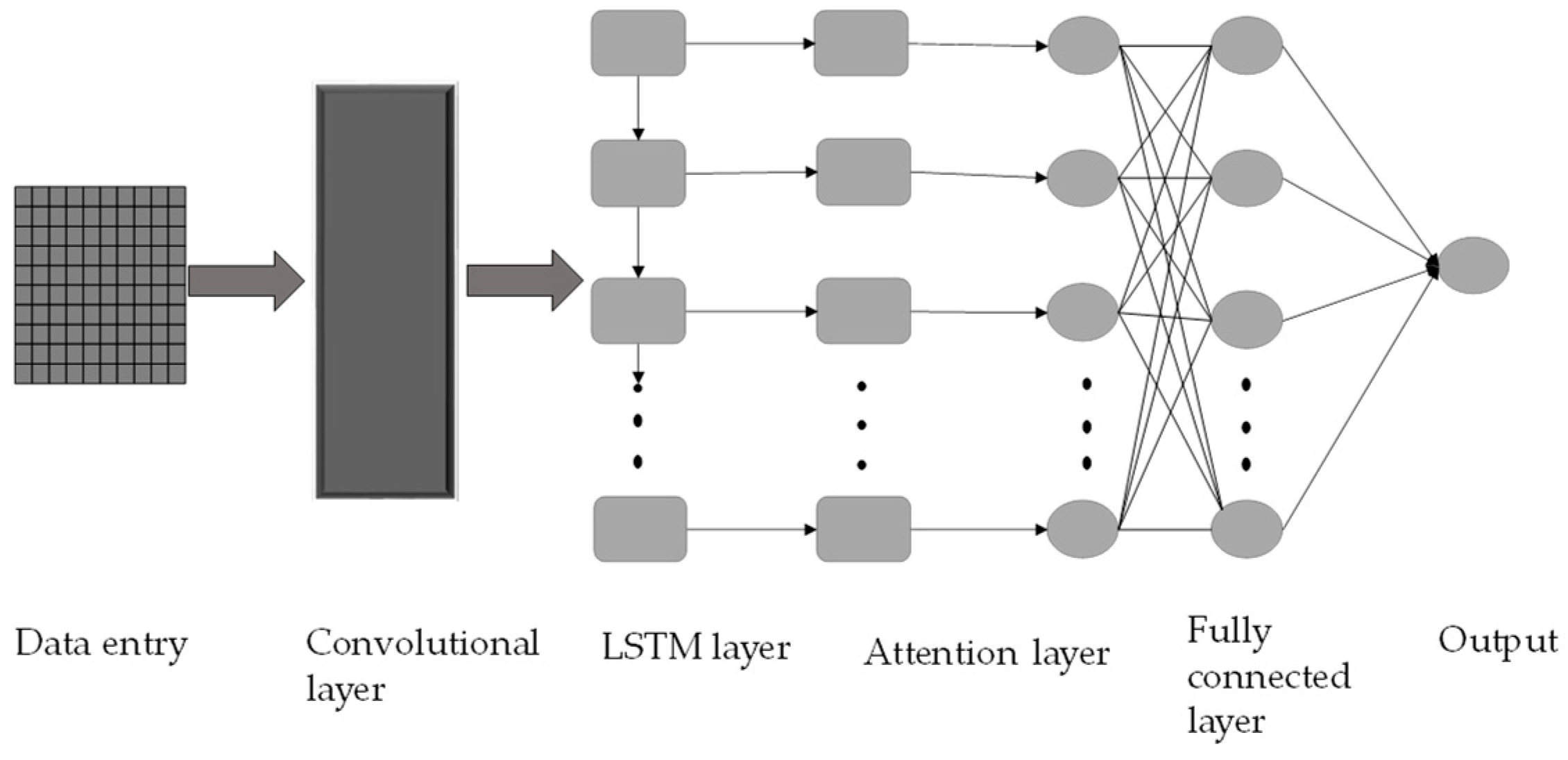
3.1. Improved LSTM Model
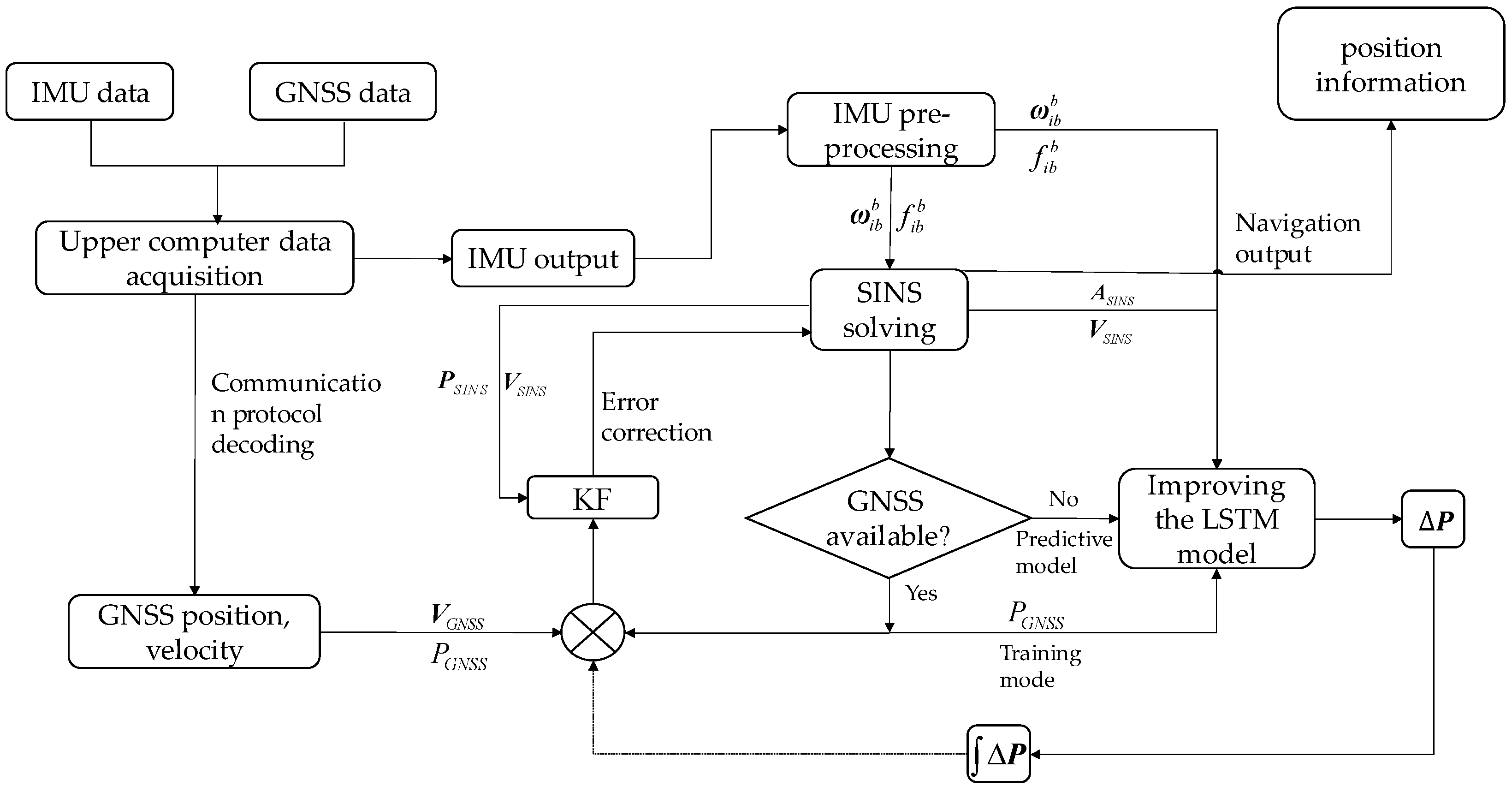
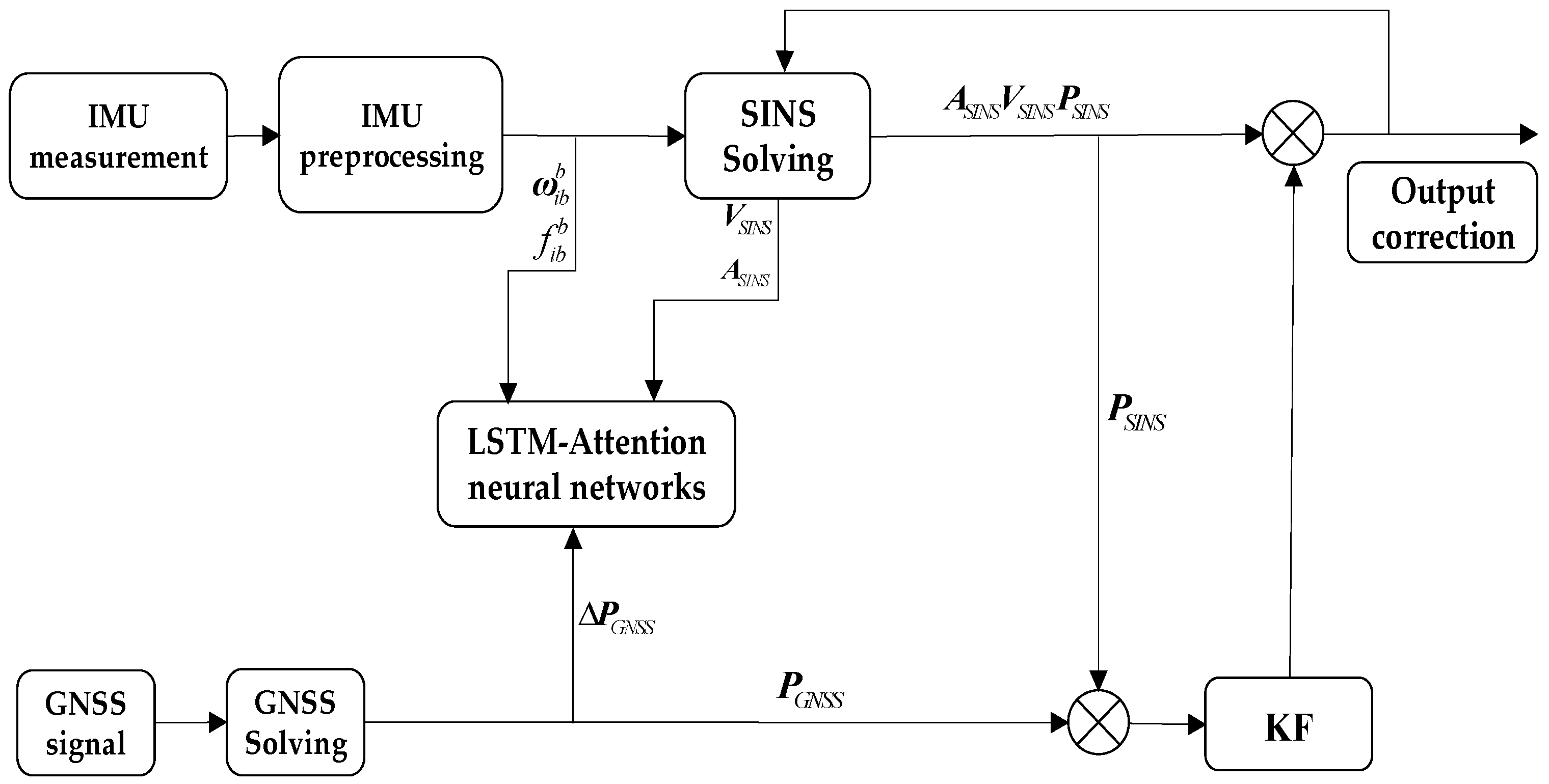
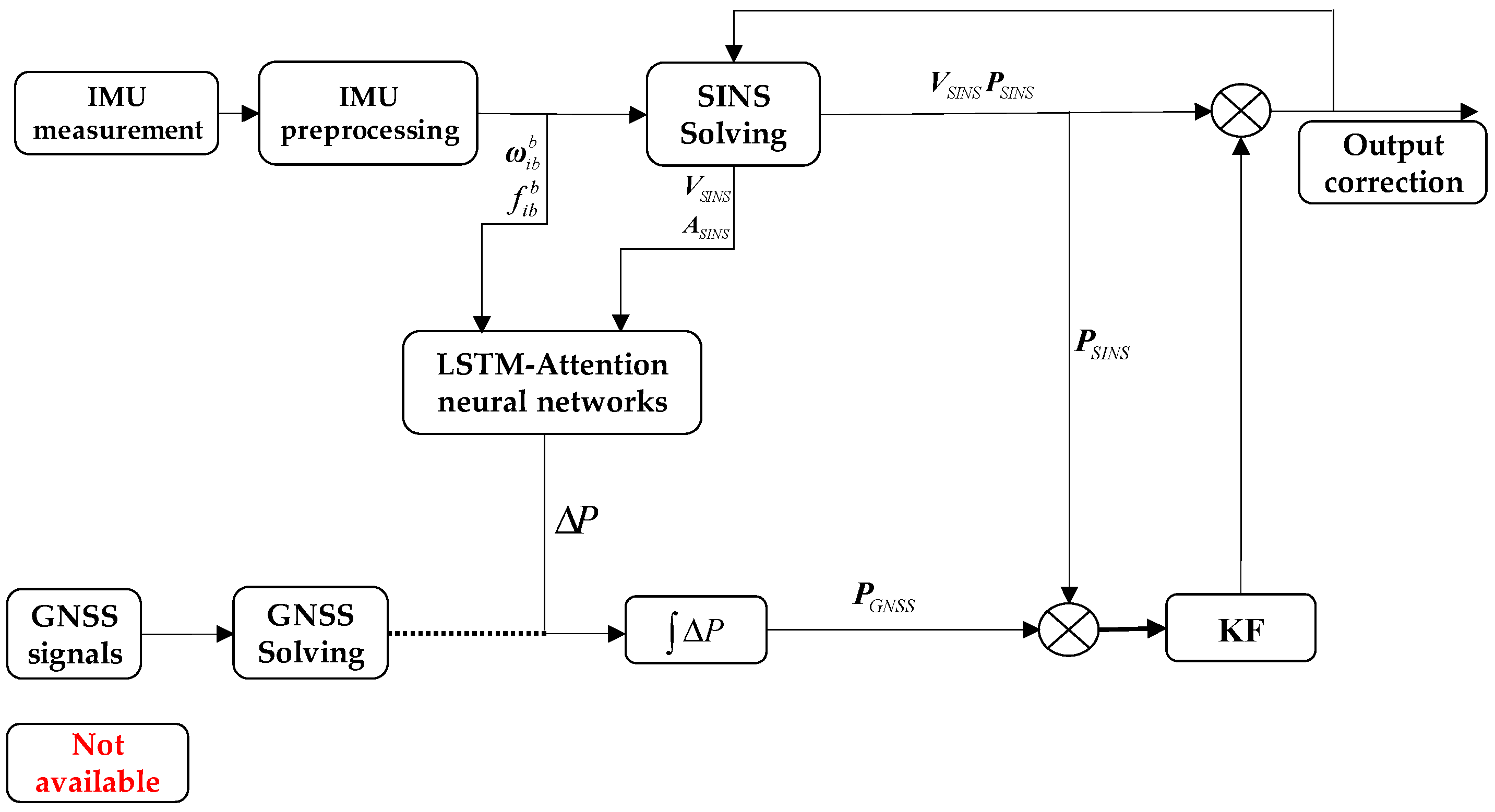
3.2. Improved LSTM-Assisted Combined Navigation and Positioning Model
3.3. Combined Navigation Filtering Design under No GNSS Signal Conditions
3.3.1. Equation of State for Combined GNSS/SINS Navigation Systems
3.3.2. Measurement Equations for Combined GNSS/SINS Navigation Systems
4. Algorithm Validation
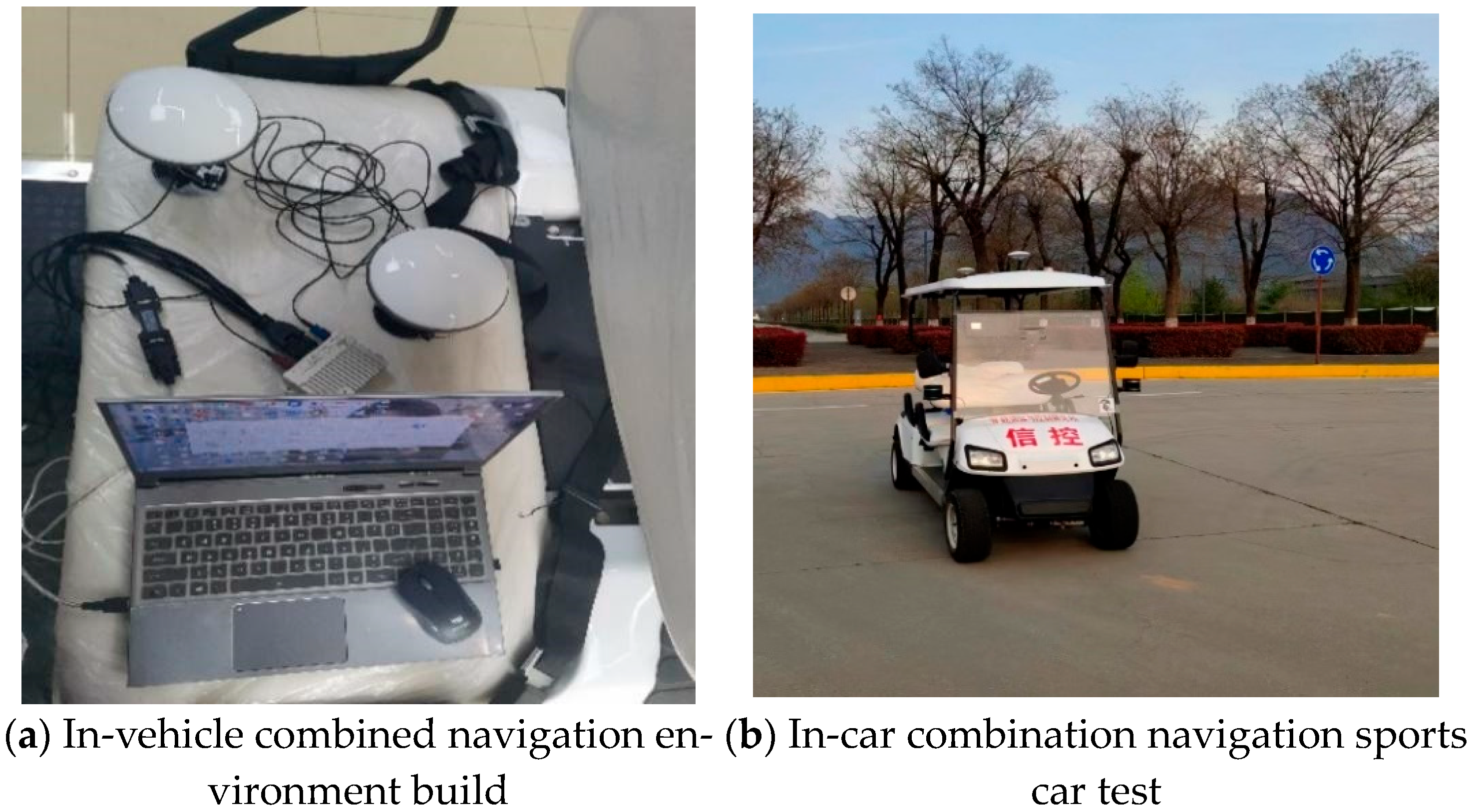
4.1. Overview of On-Board Experiments
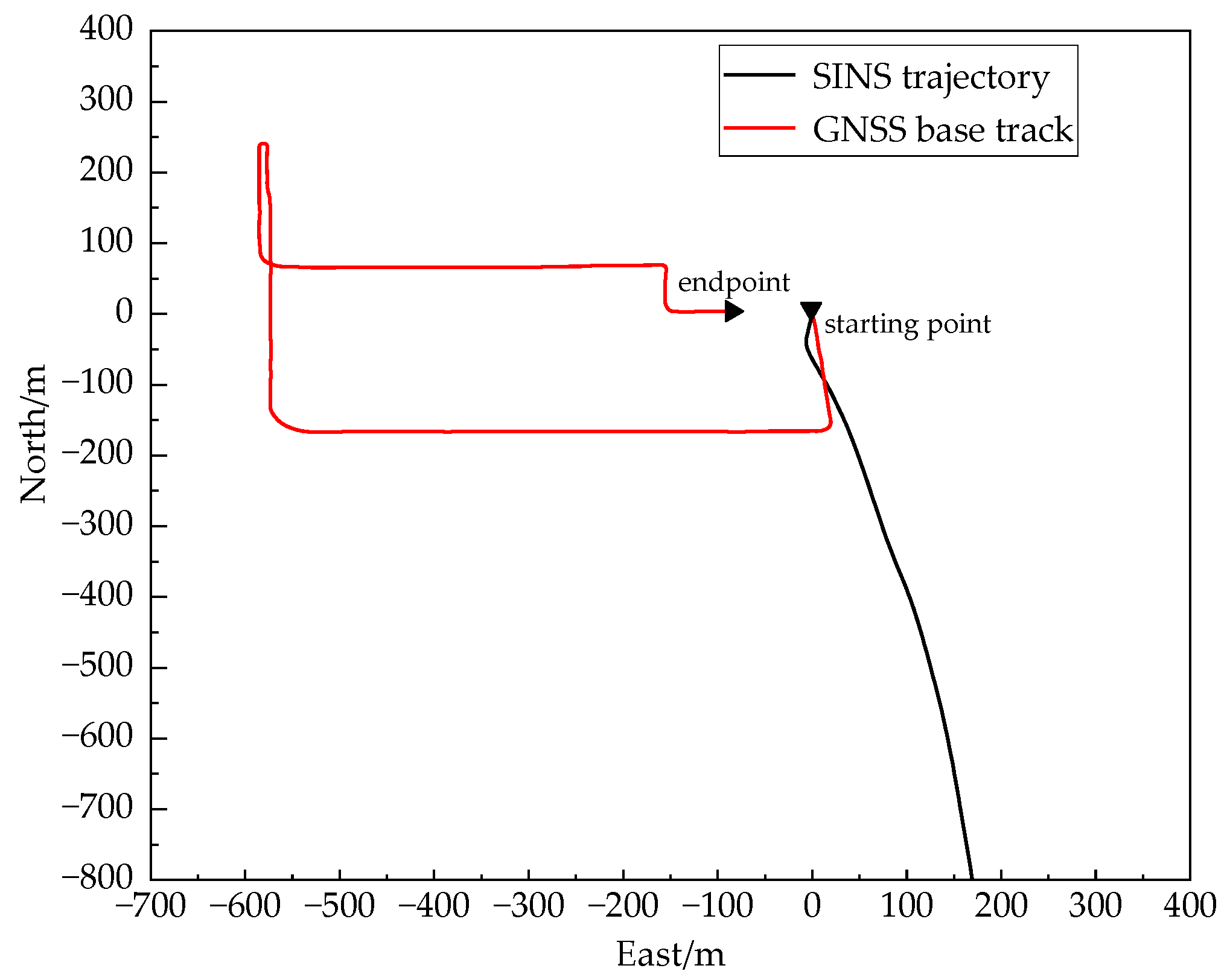
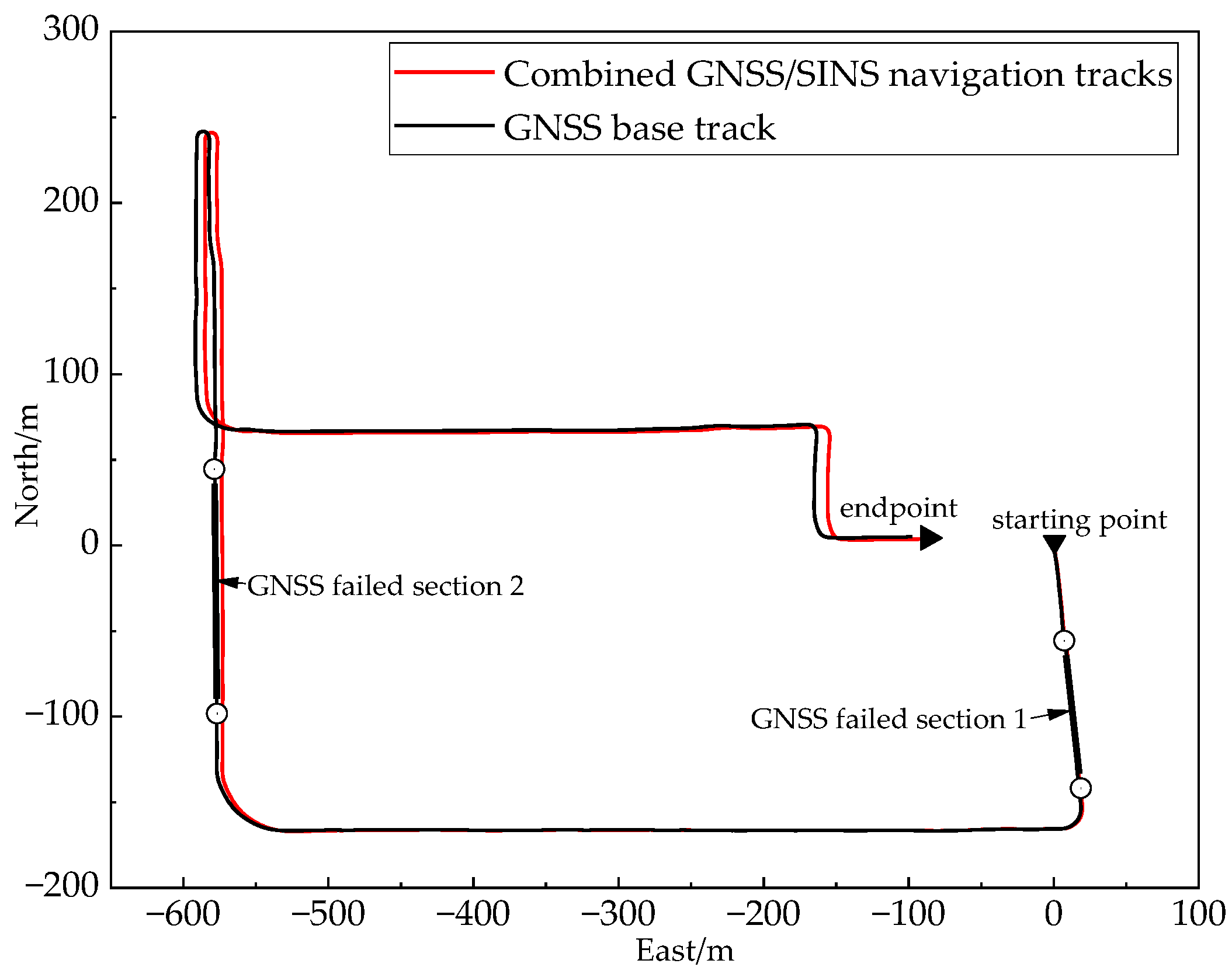
4.2. Onboard Offline Data Processing
4.3. Analysis of the Results of the On-Board Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Lai, L.; Zhao, D.; Xu, T.; Cheng, Z.; Guo, W.; Li, L. Improving Vehicle Positioning Performance in Urban Environment with Tight Integration of Multi-GNSS PPP-RTK/INS. Remote Sens. 2022, 14, 5489. [Google Scholar] [CrossRef]
- Dörterler, M.; Faruk Bay, Ö. Neural Network Based Vehicular Location Prediction Model for Cooperative Active Safety Systems. Promet-Traffic Transp. 2018, 30, 205–215. [Google Scholar] [CrossRef]
- Wang, J.; Song, H.; Jing, Q.; Liu, K. Road-range Tracking of Vehicle Trajectories Based on Millimeter-wave Radar. Chin. J. Highw. 2022, 35, 181–192. [Google Scholar]
- Li, X.Y.; Li, J.; Feng, K.Q.; Yang, Y.; Chao, Z. Research on Integrated Navigation Algorithm Based on BP Neural Network. Electron. Devices 2018, 41, 1447–1451. [Google Scholar]
- Zhi, Z.; Liu, D.; Liu, L. A performance compensation method for GPS/INS integrated navigation system based on CNN–LSTM during GPS outages. Measurement 2022, 188, 110516. [Google Scholar] [CrossRef]
- Xu, B.; Li, S.; Jin, K.; Wang, L. A Cooperative Localization Method for AUVs Based on RBF Neural Network-assisted CKF. J. Mil. Eng. 2019, 40, 2119–2128. [Google Scholar]
- Sun, W.; Cao, H.Y. KPCA/Improved RBF neural network aided GPS/UWB cooperative positioning method. J. Navig. Position. 2022, 10, 112–121. [Google Scholar]
- Bai, X.; Yang, J.; Yang, Z. Research on neural network-assisted integrated navigation algorithm. J. Navig. Position. 2020, 8, 93–98. [Google Scholar]
- Fang, W.; Jiang, J.G.; Xie, D.P. Improved integrated navigation algorithm based on MLP neural network. Comput. Eng. Des. 2021, 42, 65–69. [Google Scholar]
- Tao, Y.; Jiang, J.; Fang, W. Integrated navigation algorithm based on GRU cyclic neural network. Comput. Eng. Des. 2021, 42, 370–376. [Google Scholar]
- Xu, S.; Petrunin, I.; Tsourdos, A. Experimental Evaluation of GNSS and IMU Fusion Using Gated Recurrent Unit. In Proceedings of the 2022 Integrated Communication, Navigation and Surveillance Conference (ICNS), Dulles, VA, USA, 5–7 April 2022; pp. 1–8. [Google Scholar]
- Zhang, S.; Zheng, L.; Hou, P. Integrated Navigation Method Based on NARX Neural Network. Meas. Control Technol. 2022, 41, 119–125. [Google Scholar]
- Li, D.; Jia, X.; Zhao, J. A Novel Hybrid Fusion Algorithm for Low-Cost GPS/INS Integrated Navigation System during GPS Outages. IEEE Access 2020, 8, 53984–53996. [Google Scholar] [CrossRef]
- Gao, W.; Li, Z.; Chen, Q.; Jiang, W.; Feng, Y. Modelling and prediction of GNSS time series using GBDT, LSTM and SVM machine learning approaches. J. Geod. 2022, 96, 71. [Google Scholar] [CrossRef]
- Rafatnia, S.; Nourmohammadi, H.; Keighobadi, J.; Badamchizadeh, M.A. In-move aligned SINS/GNSS system using recurrent wavelet neural network (RWNN)-based integration scheme. Mechatronics 2018, 54, 155–165. [Google Scholar] [CrossRef]
- Stancic, R.; Graovac, S. The integration of strap-down INS and GPS based on adaptive error damping. Robot. Auton. Syst. 2010, 58, 1117–1129. [Google Scholar] [CrossRef]
- Fang, W.; Jiang, J.; Lu, S.; Gong, Y.; Tao, Y.; Tang, Y.; Yan, P.; Luo, H.; Liu, J. A LSTM Algorithm Estimating Pseudo Measurements for Aiding INS during GNSS Signal Outages. Remote Sens. 2020, 12, 256. [Google Scholar] [CrossRef]
- Peng, D. Pseudo-linear Kalman Filter in Passive Target Tracking. Softw. Guide 2009, 8, 32–34. [Google Scholar]
- Yang, L.; Wu, Y.X.; Wang, J.L.; Liu, Y.L. Research on recurrent neural network. Comput. Appl. 2018, 38, 1–6+26. [Google Scholar]
- Peng, W.; Wang, J.R.; Yin, S.Q. Short-term Load Forecasting Model Based on Attention-LSTM in Electricity Market. Pow. Technol. 2019, 43, 1745–1751. [Google Scholar]
- Li, M.; Ning, D.; Guo, J. Attention Mechanism-Based CNN-LSTM Model and Its Application. Comput. Eng. Appl. 2019, 55, 20–27. [Google Scholar]
- Ye, X.; Ye, Q.; Yan, X.; Wang, T.; Chen, J.; Li, S. Demand Forecasting of Online Car-Hailing with Combining LSTM + Attention Approaches. Electronics 2021, 10, 2480. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Numerical Values | Unit |
|---|---|---|
| Gyroscope constant zero offset | 10 | °/h |
| Gyroscope range | 250 | °/s |
| Accelerometer constant zero offset | 0.1 | mg |
| Accelerometer range | 4 | g |
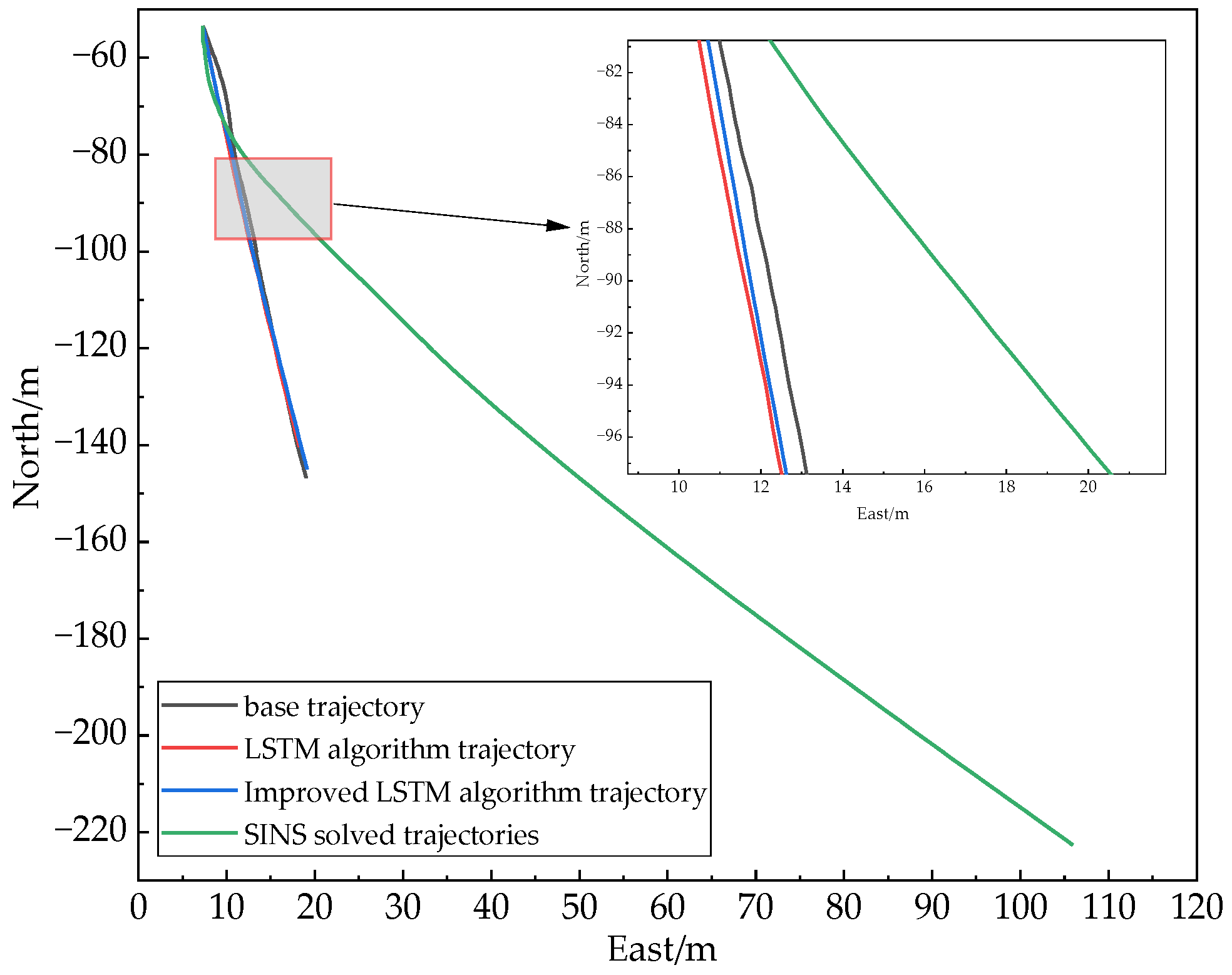
| Algorithm Comparison | Maximum Absolute Value of Error/m | Root Mean Square Error/m |
|---|---|---|
| Eastward position SINS error | 86.931 | 25.914 |
| Eastward position LSTM assisted prediction error | 0.933 | 0.288 |
| Eastward position improvement LSTM-aided prediction error | 0.886 | 0.163 |
| Northward position SINS error | 75.821 | 24.146 |
| Northward position LSTM assisted prediction error | 6.295 | 2.201 |
| Northward position improvement LSTM-aided prediction error | 2.099 | 0.976 |
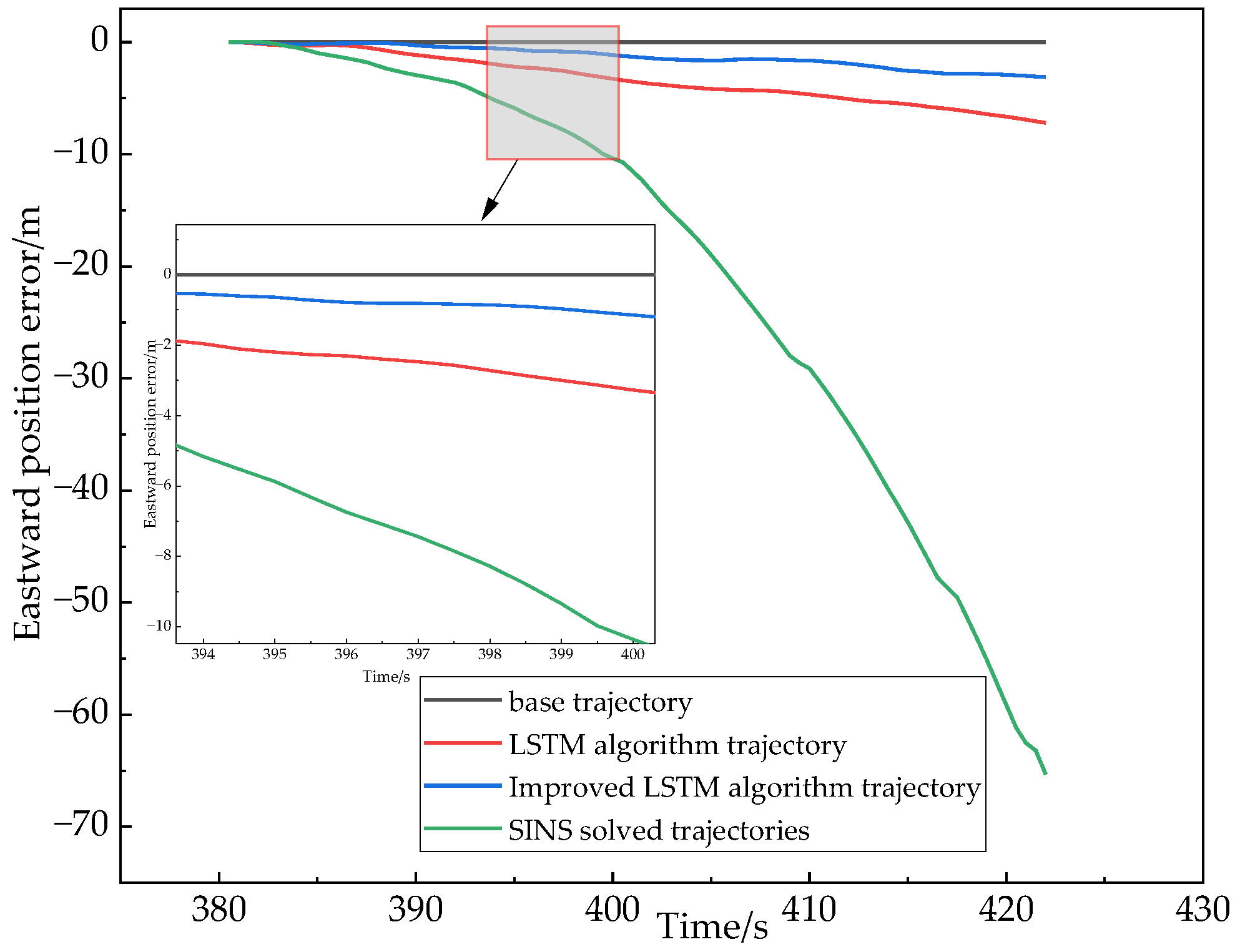
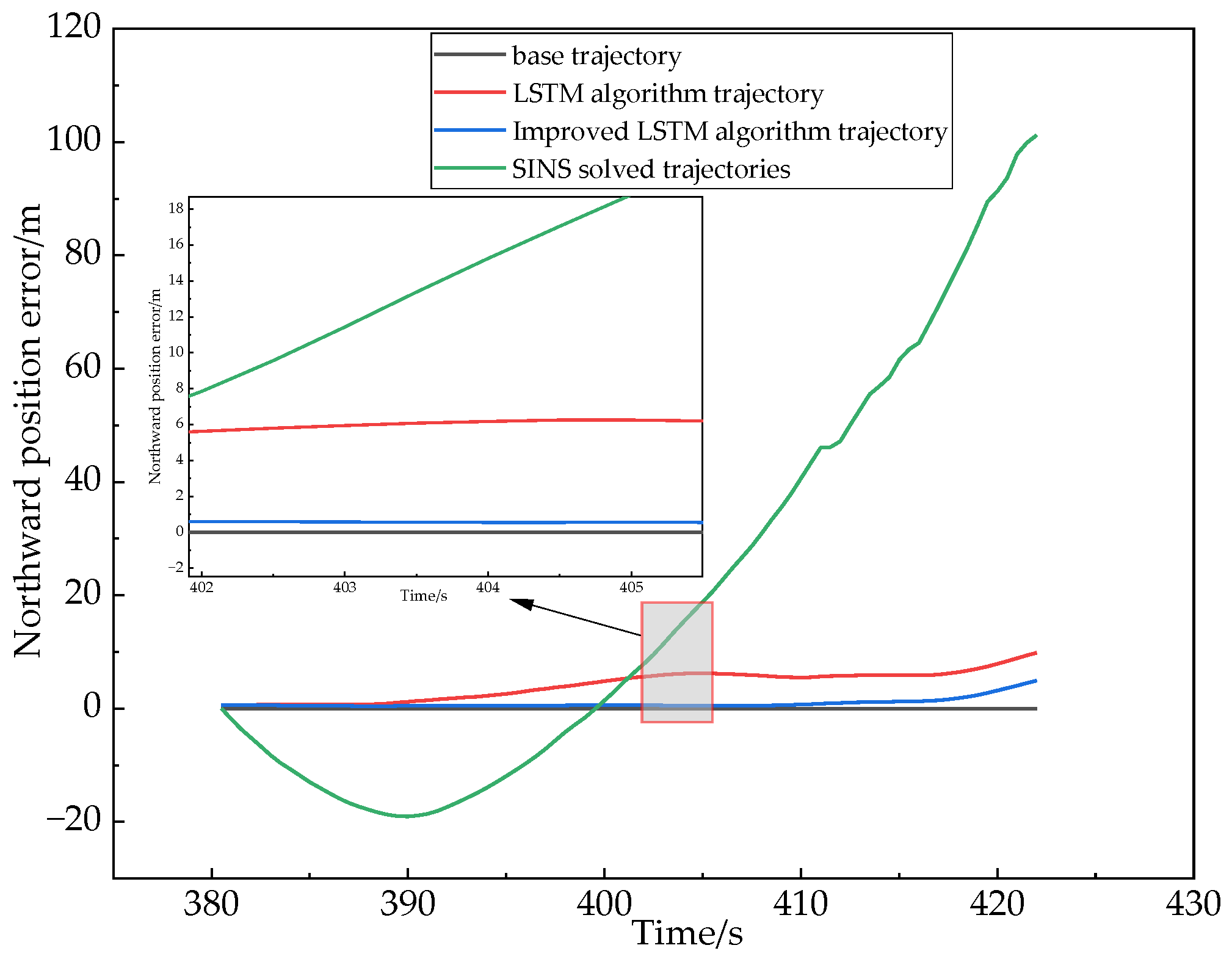
| Algorithm Comparison | Maximum Absolute Value of Error/m | Root Mean Square Error/m |
|---|---|---|
| Eastward position SINS error | 65.319 | 19.611 |
| Eastward position LSTM assisted prediction error | 7.192 | 2.159 |
| Eastward position improvement LSTM-aided prediction error | 3.105 | 0.977 |
| Northward position SINS error | 102.055 | 37.472 |
| Northward position LSTM assisted prediction error | 10.354 | 2.608 |
| Northward position improvement LSTM-aided prediction error | 5.368 | 1.023 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, L.; Xu, P.; He, X.; Li, Y.; Hou, J.; Feng, H. Improved LSTM Neural Network-Assisted Combined Vehicle-Mounted GNSS/SINS Navigation and Positioning Algorithm. Electronics 2023, 12, 3726. https://doi.org/10.3390/electronics12173726
Song L, Xu P, He X, Li Y, Hou J, Feng H. Improved LSTM Neural Network-Assisted Combined Vehicle-Mounted GNSS/SINS Navigation and Positioning Algorithm. Electronics. 2023; 12(17):3726. https://doi.org/10.3390/electronics12173726
Chicago/Turabian StyleSong, Lijun, Peiyu Xu, Xing He, Yunlong Li, Jiajie Hou, and Haoyu Feng. 2023. "Improved LSTM Neural Network-Assisted Combined Vehicle-Mounted GNSS/SINS Navigation and Positioning Algorithm" Electronics 12, no. 17: 3726. https://doi.org/10.3390/electronics12173726
APA StyleSong, L., Xu, P., He, X., Li, Y., Hou, J., & Feng, H. (2023). Improved LSTM Neural Network-Assisted Combined Vehicle-Mounted GNSS/SINS Navigation and Positioning Algorithm. Electronics, 12(17), 3726. https://doi.org/10.3390/electronics12173726