
Coordinated Voltage-Power Control for DC Distribution Networks Based on an Uncertainty and Disturbance Estimator


Abstract
:1. Introduction
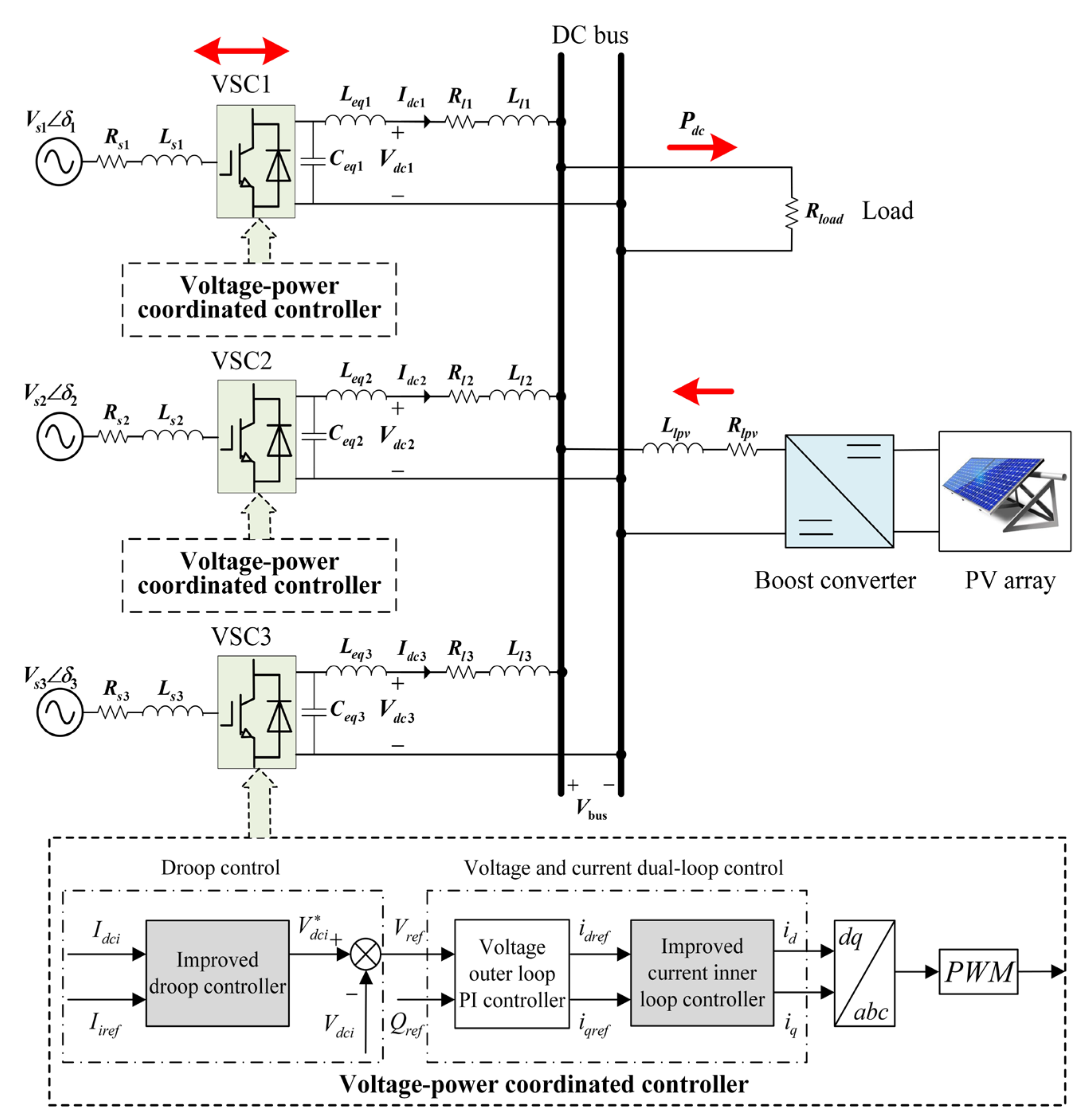
- Aiming at the contradiction between the DC voltage and the load current sharing of the converter stations under the traditional droop control due to the influence of line impedance, an improved droop control strategy based on the UDE control theory for the DC distribution network is proposed. Firstly, to realize the reasonable load current sharing of the converter stations, a load current reference model is designed by introducing the capacity ratio of the source converters. Secondly, to realize the voltage stability control of the DC distribution network, the output voltage characteristic of the droop control is designed with the control objective that the output current of the source converter can better track the reference current.
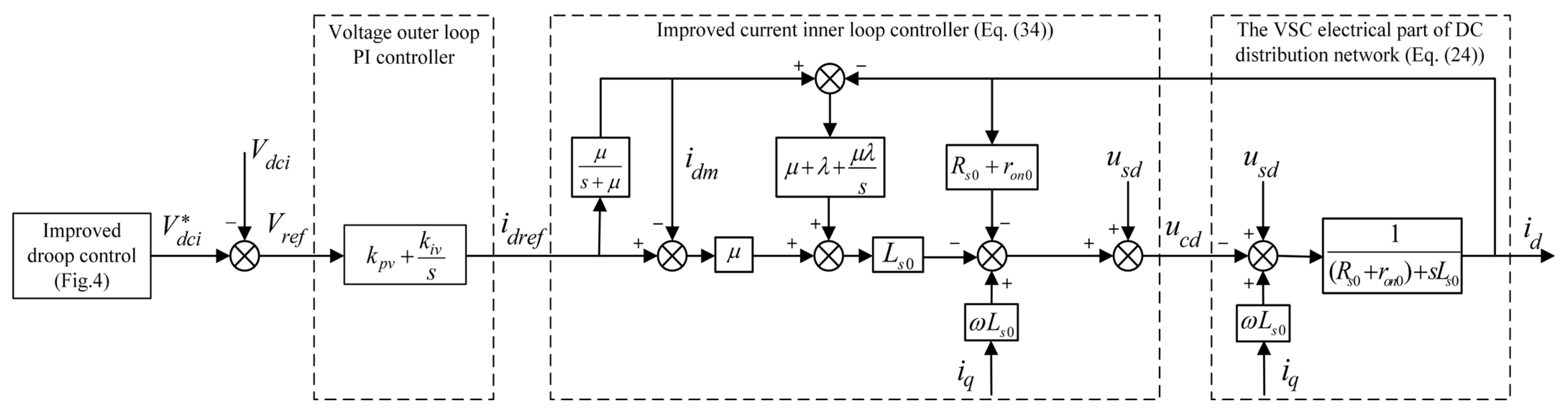
- In order to improve the tracking performance of the VSC current inner loop and the robustness of the DC voltage, the VSC current inner loop controller based on a UDE is designed. Firstly, the state space model with disturbances and the desired reference model in the DC distribution network are established. Furthermore, the controller input variable is designed from the perspective that the model error tends to be zero to estimate and compensate for the effects of various disturbances on the controller. The final structure of the improved VSC current inner loop controller is obtained.
2. Design of the Improved Droop Control in the DC Distribution Network
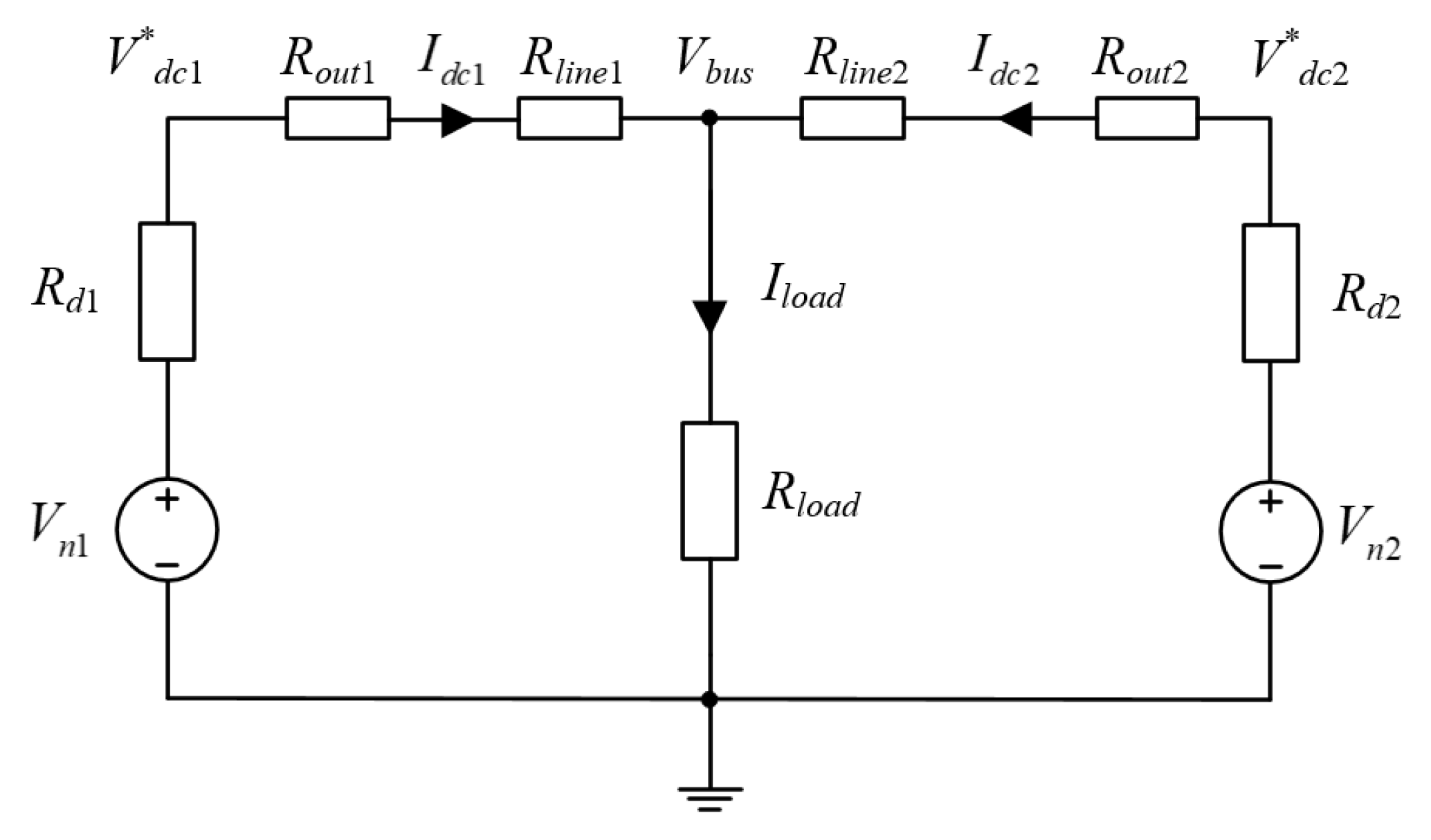
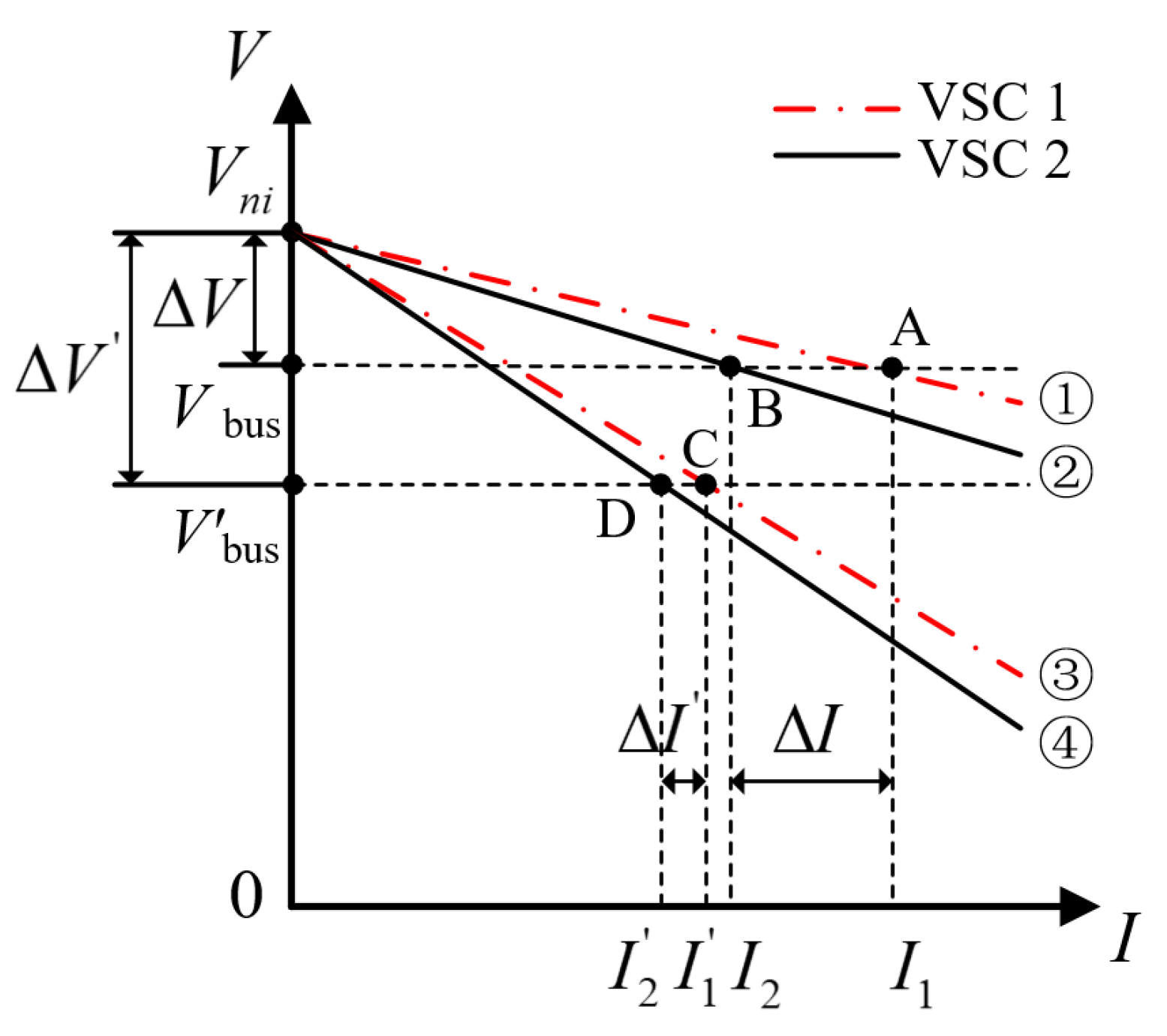
2.1. Analysis of Traditional Droop Characteristics of the DC Distribution Network
2.2. Design of the Improved Droop Control
2.2.1. Setting of Load Current Reference Value Considering the Capacity Ratio
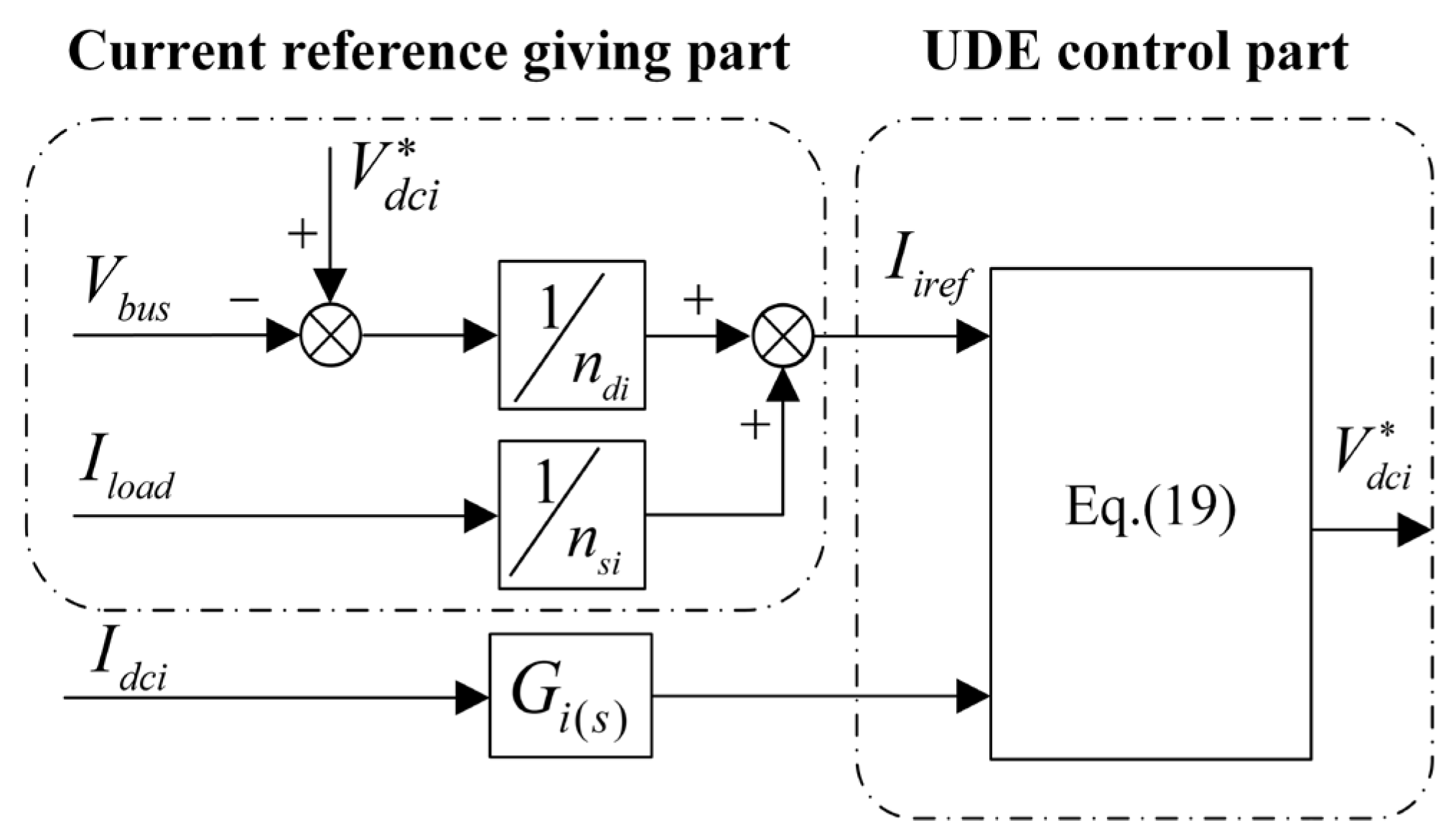
2.2.2. Design of the UDE-Based Droop Control
2.3. Analysis of the Improved Droop Control Characteristics
3. Improvement of VSC Current Inner Loop for Tracking Performance in the DC Distribution Network
3.1. The Disturbance Model of the VSC d-Axis Current
3.2. The Desired Reference Model for the VSC d-Axis Current
3.3. Implementation of the VSC d-Axis Current’s Trackability
4. Simulation Verification and Analysis
4.1. Parameter Tuning Simulation of the Improved Current Inner Loop Controller
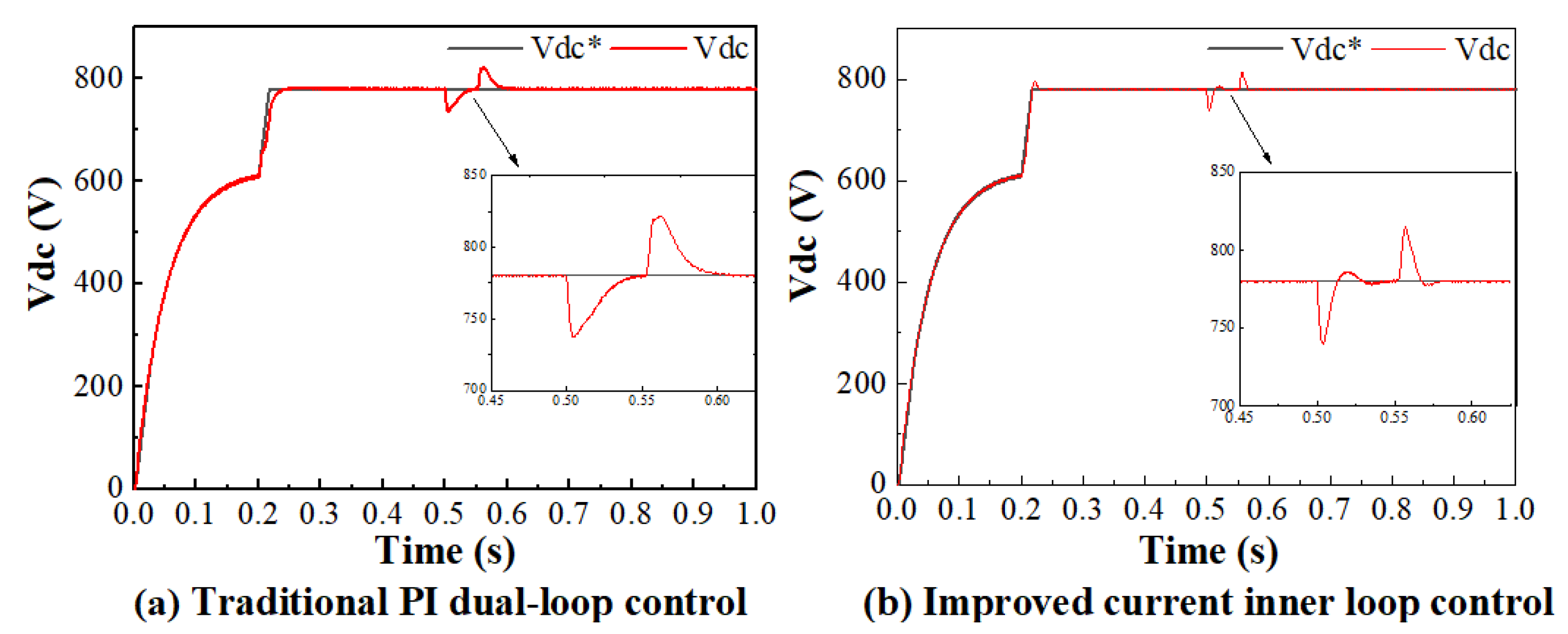
4.2. Simulation Verification of VSC Current Inner Loop Tracking Improvement in the DC Distribution Network
4.3. Performance Verification of the Voltage-Power Coordinated Control Strategy for the Three-Source DC Distribution Network
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ahmed, M.; Meegahapola, L.; Vahidnia, A.; Datta, M. Stability and Control Aspects of Microgrid Architectures-A Comprehensive Review. IEEE Access 2020, 8, 144730–144766. [Google Scholar] [CrossRef]
- Li, Y.; He, L.; Liu, F.; Li, C.B.; Cao, Y.J.; Shahidehpour, M. Flexible Voltage Control Strategy Considering Distributed Energy Storages for DC Distribution Network. IEEE Trans. Smart Grid. 2019, 10, 163–172. [Google Scholar] [CrossRef]
- Davari, M.; Mohamed, Y. Robust Droop and DC-Bus Voltage Control for Effective Stabilization and Power Sharing in VSC Multiterminal DC Grids. IEEE Trans. Power Electron. 2018, 33, 4373–4395. [Google Scholar] [CrossRef]
- Hu, J.; Shan, Y.; Cheng, K.W.; Islam, S. Overview of Power Converter Control in Microgrids—Challenges, Advances, and Future Trends. IEEE Trans. Power Electron. 2022, 37, 9907–9922. [Google Scholar] [CrossRef]
- Li, G.; Du, Z.; Shen, C.; Yuan, Z.; Wu, G. Coordinated Design of Droop Control in MTDC Grid Based on Model Predictive Control. IEEE Trans. Power Syst. 2018, 33, 2816–2828. [Google Scholar] [CrossRef]
- Pokharel, K.; Li, W.L.; Sapkota, S.; Zhang, Y.S.; Zhao, H.W.; Saleem, U. Autonomous transient power management strategy based on improved droop control for DC microgrid. Electr. Eng. 2022, 104, 4321–4334. [Google Scholar] [CrossRef]
- Saeidinia, Y.; Arabshahi, M.R.; Mousavi, S.Y.M.; Biglari, M. Autonomous control of DC microgrid based on a hybrid droop control scheme for total generation cost and transmission power loss reduction. Electr. Eng. 2023, 105, 267–283. [Google Scholar] [CrossRef]
- Che, Y.; Zhou, J.; Li, W.; Zhu, J.; Hong, C. Advanced Droop Control Scheme in Multi-terminal DC Transmission Systems. J. Electr. Eng. Technol. 2018, 13, 1060–1068. [Google Scholar]
- Mokhtar, M.; Marei, M.I.; El-Sattar, A.A. An Adaptive Droop Control Scheme for DC Microgrids Integrating Sliding Mode Voltage and Current Controlled Boost Converters. IEEE Trans. Smart Grid. 2019, 10, 1685–1693. [Google Scholar] [CrossRef]
- Da Silva, W.; Oliveira, T.R.; Donoso-Garcia, P.F. Hybrid Distributed and Decentralized Secondary Control Strategy to Attain Accurate Power Sharing and Improved Voltage Restoration in DC Microgrids. IEEE Trans. Power Electron. 2020, 35, 6458–6469. [Google Scholar] [CrossRef]
- Liu, S.; Miao, H.; Li, J.; Yang, L. Voltage control and power sharing in DC Microgrids based on voltage-shifting and droop slope-adjusting strategy. Electr. Power Syst. Res. 2023, 214, 108814. [Google Scholar] [CrossRef]
- Ding, X.Y.; Yao, R.Y.; Zhai, X.H.; Li, C.; Dong, H.N. An adaptive compensation droop control strategy for reactive power sharing in islanded microgrid. Electr. Eng. 2020, 102, 267–278. [Google Scholar] [CrossRef]
- Han, Y.; Ning, X.; Li, L.; Yang, P.; Blaabjerg, F. Droop coefficient correction control for power sharing and voltage restoration in hierarchical controlled DC microgrids. Int. J. Electr. Power Energy Syst. 2021, 133, 107277. [Google Scholar] [CrossRef]
- Feng, X.; Tao, Y.; Cui, X.; Shao, K.; Wang, Y. Sliding mode and predictive current control strategy of the three-phase Vienna rectifier. J. Power Electron. 2020, 20, 743–753. [Google Scholar] [CrossRef]
- Zhao, Z.H.; Han, Z.P.; Liu, X.D.; Yao, J.; Ji, B.J.; Wang, S.Z.; Zhao, J.F. Optimal Tuning of the Current Loop for Dual-Loop Controlled Grid-Forming Converters Based on Active Damping Optimization. IEEE Access 2021, 9, 35801–35813. [Google Scholar] [CrossRef]
- Wu, B.N.; Gao, Z.Q.; Zhou, X.S.; Ma, Y.J.; Wang, C.L. Research and Simulation of DC Microgrid Three-Phase AC-DC Converter Control Strategy Based on Double Loop. IEEE Access 2020, 8, 186448–186461. [Google Scholar] [CrossRef]
- Xin, Z.; Wang, X.F.; Loh, P.C.; Blaabjerg, F. Grid-Current-Feedback Control for LCL-Filtered Grid Converters with Enhanced Stability. IEEE Trans. Power Electron. 2017, 32, 3216–3228. [Google Scholar] [CrossRef]
- Xia, C.; Wang, Z.; Shi, T.; He, X. An Improved Control Strategy of Triple Line-Voltage Cascaded Voltage Source Converter Based on Proportional-Resonant Controller. IEEE Trans. Ind. Electron. 2013, 60, 2894–2908. [Google Scholar] [CrossRef]
- Aharon, I.; Shmilovitz, D.; Kuperman, A. Uncertainty and Disturbance Estimator-Based Controllers Design Under Finite Control Bandwidth Constraint. IEEE Trans. Ind. Electron. 2018, 65, 1439–1449. [Google Scholar] [CrossRef]
- Sakthivel, R.; Harshavarthini, S.; Tatar, N.E. Disturbance estimation based tracking control for periodic piecewise time-varying delay systems. IET Control Theory Appl. 2021, 15, 459–471. [Google Scholar] [CrossRef]
- Tian, Z.; Zhong, Q.C.; Ren, B.B.; Yuan, J.Q. Stabilisability analysis and design of UDE-based robust control. IET Control Theory Appl. 2019, 13, 1445–1453. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Wang, Y.Q.; Ren, B.B. UDE-Based Robust Droop Control of Inverters in Parallel Operation. IEEE Trans. Ind. Electron. 2017, 64, 7552–7562. [Google Scholar] [CrossRef]
- Ren, J.J.; Ye, Y.Q.; Xu, G.F.; Zhao, Q.S.; Zhu, M.Z. Uncertainty-and-Disturbance-Estimator-Based Current Control Scheme for PMSM Drives with a Simple Parameter Tuning Algorithm. IEEE Trans. Power Electron. 2017, 32, 5712–5722. [Google Scholar] [CrossRef]
- Ye, Y.Q.; Xiong, Y.K. UDE-Based Current Control Strategy for LCCL-Type Grid-Tied Inverters. IEEE Trans. Ind. Electron. 2018, 65, 4061–4069. [Google Scholar] [CrossRef]
- Zhong, Q.C. Robust Droop Controller for Accurate Proportional Load Sharing Among Inverters Operated in Parallel. IEEE Trans. Ind. Electron. 2013, 60, 1281–1290. [Google Scholar] [CrossRef]
- Deng, W.; Pei, W.; Wu, Q.; Zhuang, Y. Analysis of Interactive Behavior and Stability of Low-Voltage Multiterminal DC System Under Droop Control Modes. IEEE Trans. Ind. Electron. 2022, 69, 6948–6959. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameter | The VSC1 | The VSC2 | The VSC3 |
|---|---|---|---|
| Grid-side voltage amplitude | 380 | 380 | 380 |
| Grid-side voltage phase angle | 0 | 0 | 0 |
| AC-side resistance | 0.03 | 0.03 | 0.03 |
| AC-side inductance | 0.25 | 0.25 | 0.25 |
| DC-side capacitance | 7800 | 7800 | 7800 |
| DC-side inductance | 0.1 | 0.1 | 0.1 |
| Converter losses | 5 | 5 | 5 |
| Grid-connected line resistance | 0.3 | 0.2 | 0.2 |
| Grid-connected line inductance | 0.06 | 0.02 | 0.02 |
| Converter transmitted active power rating | 5 | ||
| Converter transmitted reactive power rating | 0 | ||
| Grid-side frequency | 50 | ||
| Switching frequency | 8000 | ||
| PV Parameter | PV Parameter Values |
|---|---|
| 20 | |
| 600 | |
| 0.5 | |
| 0.1 | |
| 3000 | |
| 0.2 | |
| 0.01 | |
| 3600 |
| Controller Loops | Controller Parameter | Controller Parameter Values |
|---|---|---|
| The VSC inner loop (d-axis) | 0.5 | |
| 1/0.08 | ||
| The VSC outer loop (d-axis) | 3.5 | |
| 1/0.0035 | ||
| The VSC inner loop (q-axis) | 0.5 | |
| 1/0.08 | ||
| The VSC outer loop (q-axis) | 0.3 | |
| 1/0.02 | ||
| Droop control coefficient | 3 | |
| Boost transformer coefficient | 1 | |
| 0.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, L.; Tan, H.; Kong, X.; Cao, Y.; Luo, H.; Lin, Y.; Zhang, Z. Coordinated Voltage-Power Control for DC Distribution Networks Based on an Uncertainty and Disturbance Estimator. Electronics 2023, 12, 3137. https://doi.org/10.3390/electronics12143137
Lin L, Tan H, Kong X, Cao Y, Luo H, Lin Y, Zhang Z. Coordinated Voltage-Power Control for DC Distribution Networks Based on an Uncertainty and Disturbance Estimator. Electronics. 2023; 12(14):3137. https://doi.org/10.3390/electronics12143137
Chicago/Turabian StyleLin, Li, Huidan Tan, Xianyu Kong, Yapei Cao, Hao Luo, Yulu Lin, and Zhijin Zhang. 2023. "Coordinated Voltage-Power Control for DC Distribution Networks Based on an Uncertainty and Disturbance Estimator" Electronics 12, no. 14: 3137. https://doi.org/10.3390/electronics12143137
APA StyleLin, L., Tan, H., Kong, X., Cao, Y., Luo, H., Lin, Y., & Zhang, Z. (2023). Coordinated Voltage-Power Control for DC Distribution Networks Based on an Uncertainty and Disturbance Estimator. Electronics, 12(14), 3137. https://doi.org/10.3390/electronics12143137