
An Algorithm for Sorting Staggered PRI Signals Based on the Congruence Transform

Abstract
:1. Introduction
2. Model and Analysis
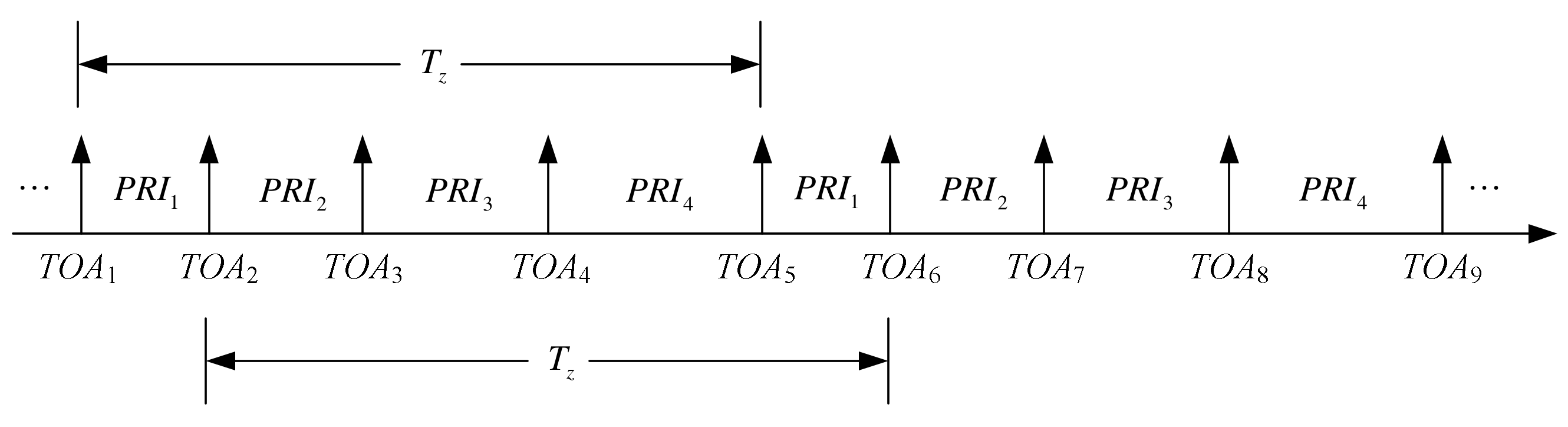
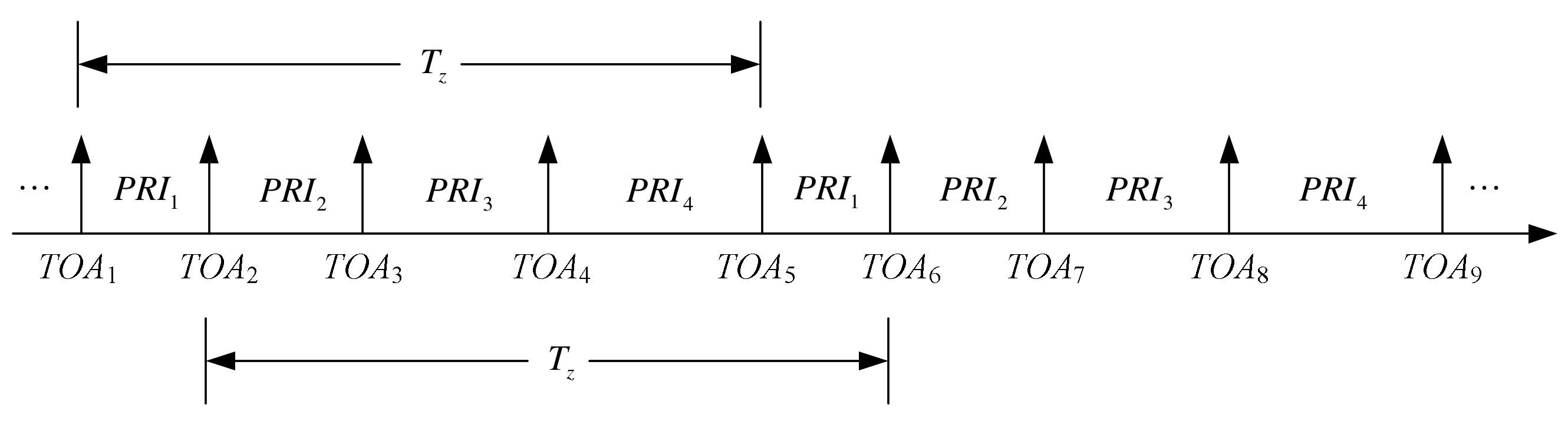
2.1. Signal Model of Pulse Trains with Staggered PRI
2.2. Congruence Transform of Staggered PRI Signal
3. Sorting Algorithm Based on Congruent Transform
3.1. Principle of Signal Sorting Algorithm
3.2. Flow of Signal Sorting Algorithm
3.3. Computational Complexity Analysis
4. Simulation and Analysis
4.1. Experiment 1: Assess the Algorithm Effectiveness under Different Signal Environments
4.2. Experiment 2: The Effect of Pulse Loss and Interference Pulse on the Proposed Algorithm
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lang, P.; Fu, X.J.; Cui, Z.D.; Feng, C.; Chang, J.J. Subspace Decomposition Based Adaptive Density Peak Clustering for Radar Signals Sorting. IEEE Signal Process. Lett. 2022, 29, 424–428. [Google Scholar] [CrossRef]
- Jia, J.; Han, Z.; Liu, L.; Xie, H.; Lv, M. Research on the Sequential Difference Histogram Failure Principle Applied to the Signal Design of Radio Frequency Stealth Radar. Electronics 2022, 11, 2192. [Google Scholar] [CrossRef]
- Liu, Z.M. Online pulse deinterleaving with finite automata. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 1139–1147. [Google Scholar] [CrossRef]
- Manickchand, K.; Strydom, J.J.; Mishra, A.K. Comparative study of TOA based emitter deinterleaving and tracking algorithms. In Proceedings of the 2017 IEEE AFRICON, Cape Town, South Africa, 18–20 September 2017. [Google Scholar]
- Zhao, S.; Wang, W.; Zeng, D.; Chen, X.; Zhang, Z.; Xu, F.; Mao, X.; Liu, X. A novel aggregated multipath extreme gradient boosting approach for radar emitter classification. IEEE Trans. Ind. Electron. 2021, 69, 703–712. [Google Scholar] [CrossRef]
- Guo, Q.; Teng, L.; Qi, L.; Ji, X.; Xiang, J. A Novel Radar Signals Sorting Method-Based Trajectory Features. IEEE Access 2019, 7, 171235–171245. [Google Scholar] [CrossRef]
- Sui, J.P.; Liu, Z.; Liu, L.; Xiang, L. Progress in radar emitter signal deinterleaving. J. Radars 2022, 11, 418–433. [Google Scholar]
- Mardia, H.K. New techniques for the deinterleaving of repetitive sequences. IEE Proc. F Radar Signal Process. 1989, 136, 149–154. [Google Scholar] [CrossRef]
- Milojevic, D.J.; Popovic, B.M. Improved algorithm for the deinterleaving of radar pulses. IEE Proc. F Radar Signal Process. 1992, 139, 98–104. [Google Scholar] [CrossRef]
- Mahdavi, A.; Pezeshk, A.M. Fast enhanced algorithm of PRI transform. In Proceedings of the 6th International Symposium on Parallel Computing in Electrical Engineering, Luton, UK, 3–7 April 2011; pp. 179–184. [Google Scholar]
- Liu, Y.C.; Zhang, Q.Y. Improved method for deinterleaving radar signals and estimating PRI values. IET Radar Sonar Navig. 2018, 12, 506–514. [Google Scholar] [CrossRef]
- Makocami, S.M.B.; Torun, O.; Abaci, H.; Akdemir, Ş.B.; Yıldırım, A. Deinterleaving for radars with jitter and agile pulse repetition interval. In Proceedings of the 25th Signal Processing and Communications Applications Conference, Antalya, Turkey, 15–18 May 2017; pp. 1–4. [Google Scholar]
- Kang, K.; Zhang, Y.X.; Guo, W.P. Key Radar Signal Sorting and Recognition Method Based on Clustering Combined with PRI Transform Algorithm. J. Artif. Intell. Technol. 2022, 2, 62–68. [Google Scholar] [CrossRef]
- Ge, Z.P.; Sun, X.; Ren, W.J.; Chen, W.; Xu, G. Improved algorithm of radar pulse repetition interval deinter-leaving based on pulse correlation. IEEE Access 2019, 7, 30126–30134. [Google Scholar] [CrossRef]
- Chen, T.; Wang, T.H.; Guo, L.M. Sequence searching methods of radar signal pulses based on PRI transform algorithm. Syst. Eng. Electron. 2017, 39, 1261–1267. [Google Scholar]
- Wang, J.L.; Huang, Y.J. Stagger Pulse Repetition Interval Pulse Train Deinterleaving Algorithm Based on Sequence Association. J. Electron. Inf. Technol. 2021, 43, 1145–1153. [Google Scholar]
- Kang, S.Q.; Liu, Z.M. Automatic reconstruction of regular radar pulse repetition patterns based on interleaved pulse train. J. Signal Process. 2021, 37, 2069–2076. [Google Scholar]
- Liu, Z.M.; Kang, S.Q.; Chai, X.M. Automatic Pulse Repetition Pattern Reconstruction of Conventional Radars. IET Radar Sonar Navig. 2021, 15, 500–509. [Google Scholar] [CrossRef]
- Tao, J.W.; Yang, C.Z.; Xu, C.W. Estimation of PRI Stagger in Case of Missing Observations. IEEE Trans. Geosci. Remote Sens. 2020, 58, 7982–8001. [Google Scholar] [CrossRef]
- Cheng, W.; Zhang, Q.; Dong, J.; Wang, C.; Liu, X.; Fang, G. An Enhanced Algorithm for De-interleaving Mixed Radar Signals. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 3927–3940. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Scene | Algorithm in [10] | Algorithm in [16] | Algorithm in [18] | Proposed Algorithm |
|---|---|---|---|---|---|
| 1 | Radar 1, 2 | [1,2] | [1,2] | [1,2] | [1,2] |
| 2 | Radar 3, 4 | — | [3,4], N-sub | [3,4], N-sub | [3,4], Y-sub |
| 3 | Radar 1, 2, 3 | [1,2] | [1,2,3], N-sub | [1,2,3], N-sub | [1,2,3], Y-sub |
| 4 | Radar 1, 3, 4 | [1] | [1,3,4], N-sub | [1,3,4], N-sub | [1,3,4], Y-sub |
| 5 | Radar 1, 2, 3, 4 | [1,2] | [1,2,3,4], N-sub | [1,2,3,4], N-sub | [1,2,3,4], Y-sub |
| Radar 1 | Radar 2 | Radar 3 | Radar 4 | |
|---|---|---|---|---|
| Frame period (μs) | — | — | 347 | 339 |
| Sub-PRIs (μs) | — | — | 90, 115, 142 | 61, 65, 71, 73, 69 |
| PRI value (μs) | 278 | 261 | — | — |
| Pusle number | 100 | 100 | 120 | 150 |
| First TOA (μs) | 0 | 37 | 25 | 11 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, H.; Wang, X.; Qi, X.; Wang, C. An Algorithm for Sorting Staggered PRI Signals Based on the Congruence Transform. Electronics 2023, 12, 2888. https://doi.org/10.3390/electronics12132888
Dong H, Wang X, Qi X, Wang C. An Algorithm for Sorting Staggered PRI Signals Based on the Congruence Transform. Electronics. 2023; 12(13):2888. https://doi.org/10.3390/electronics12132888
Chicago/Turabian StyleDong, Huixu, Xiaofeng Wang, Xinglong Qi, and Chunyu Wang. 2023. "An Algorithm for Sorting Staggered PRI Signals Based on the Congruence Transform" Electronics 12, no. 13: 2888. https://doi.org/10.3390/electronics12132888
APA StyleDong, H., Wang, X., Qi, X., & Wang, C. (2023). An Algorithm for Sorting Staggered PRI Signals Based on the Congruence Transform. Electronics, 12(13), 2888. https://doi.org/10.3390/electronics12132888