
A Novel 3-D Jerk System, Its Bifurcation Analysis, Electronic Circuit Design and a Cryptographic Application

 ,
, 
 ,
,  , , ,
, , ,
Abstract
:1. Introduction
2. A New Jerk System
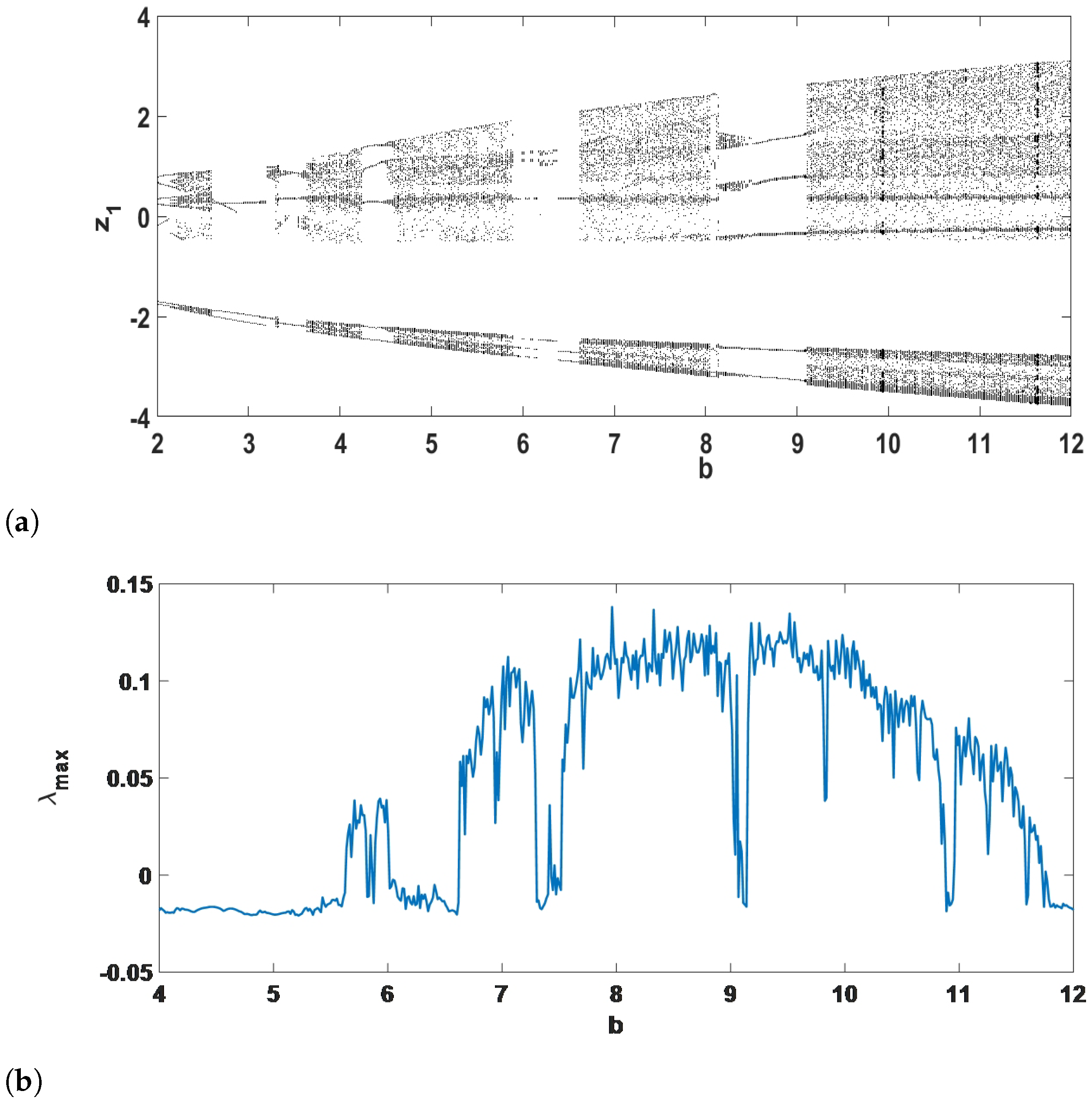
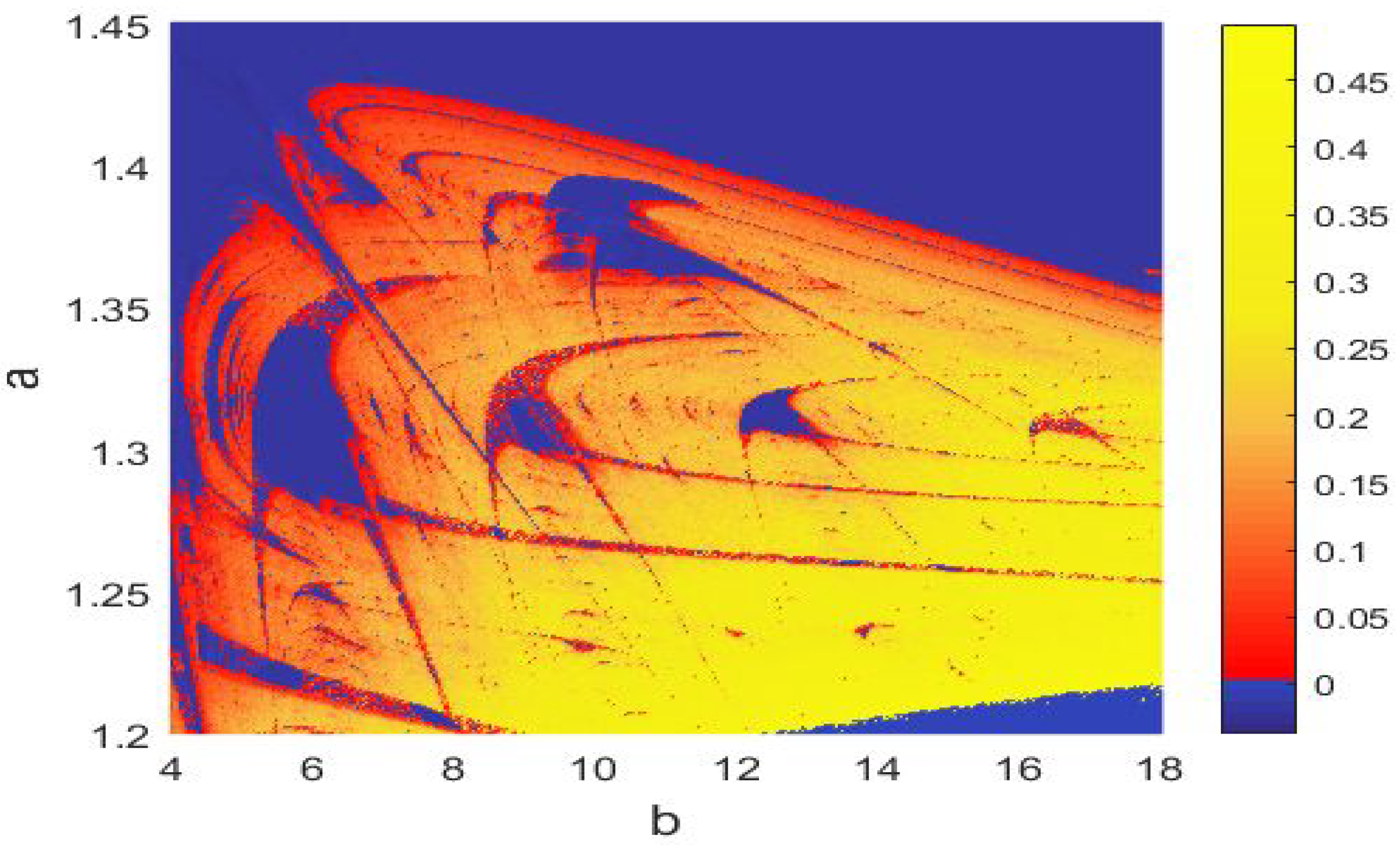
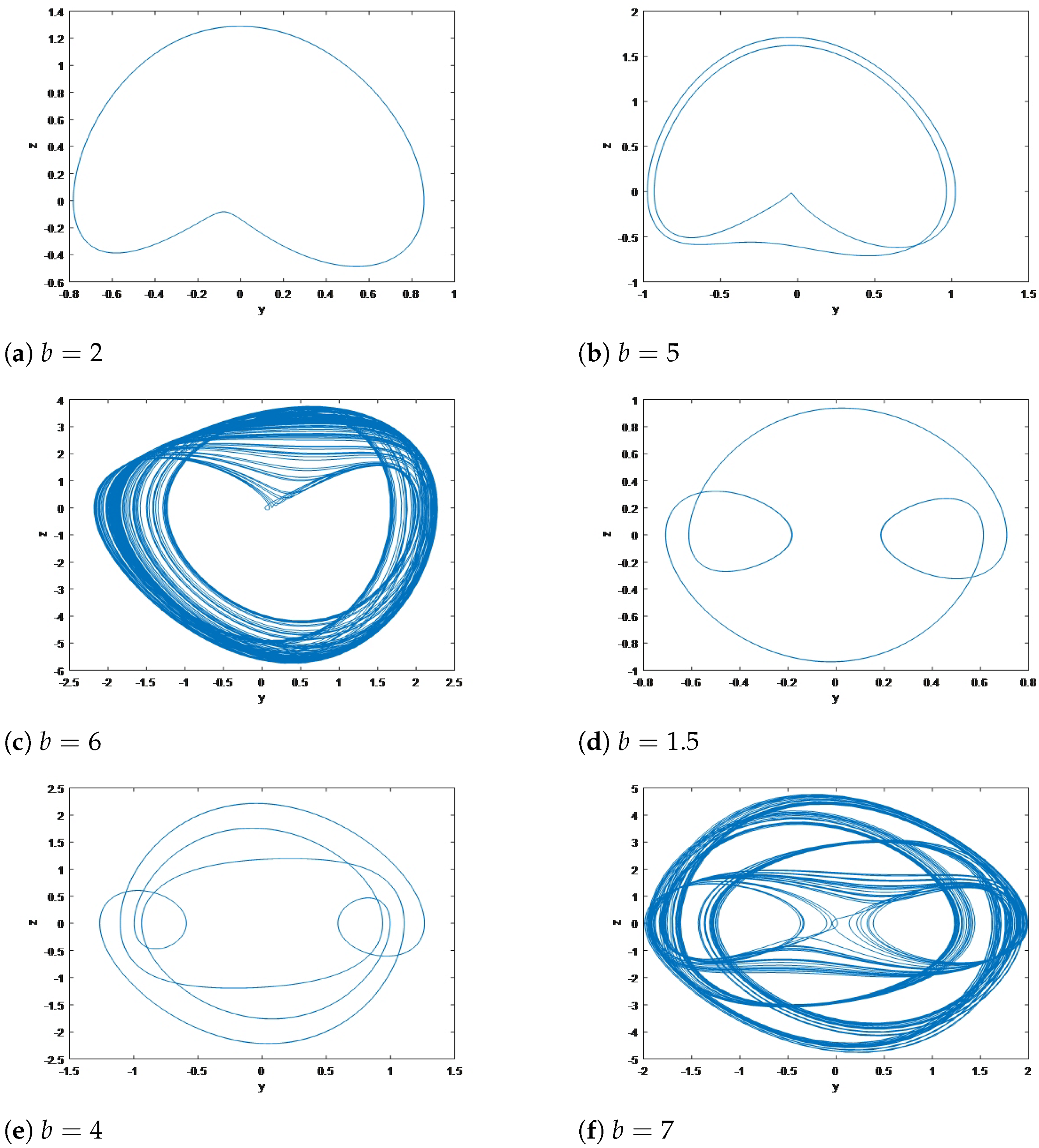
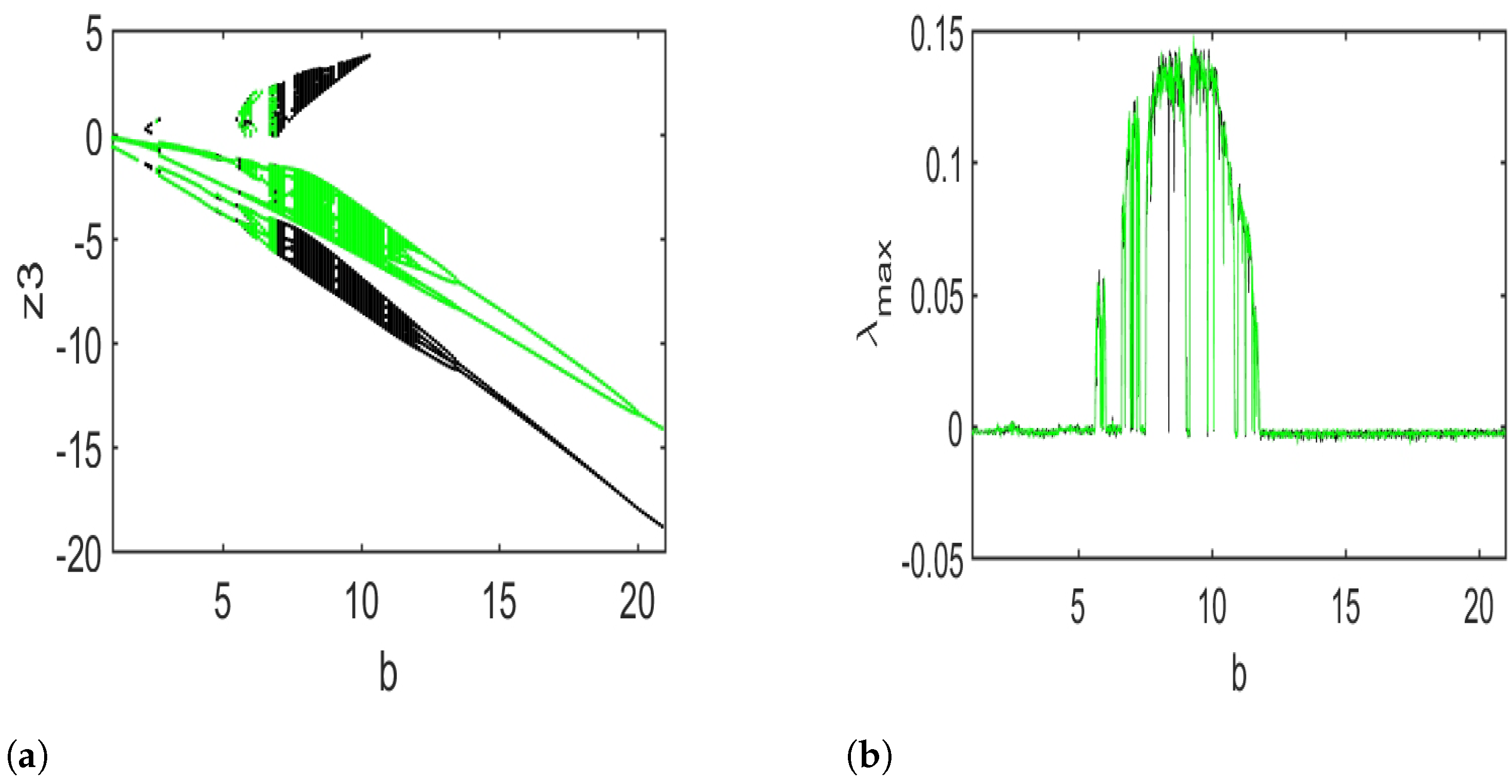
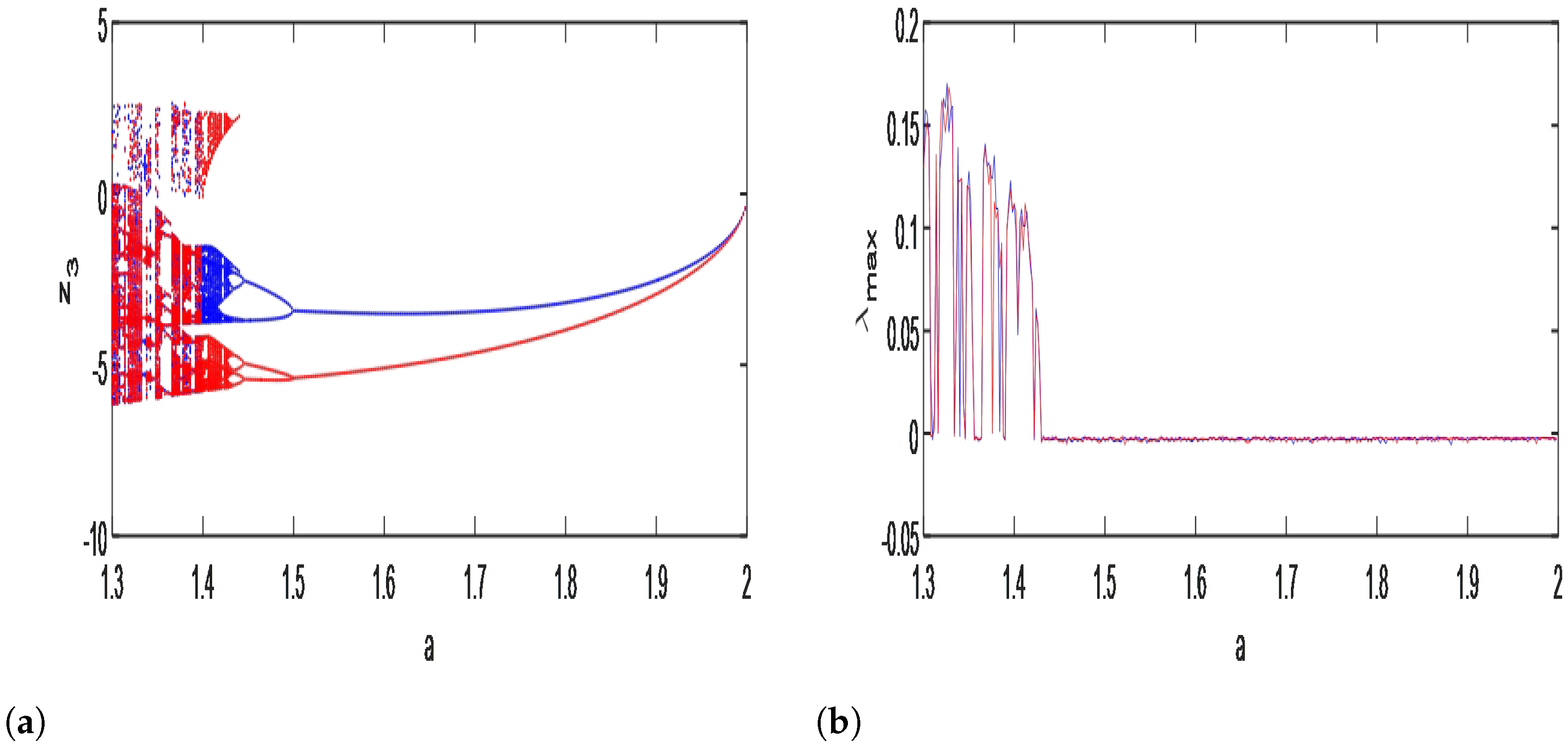
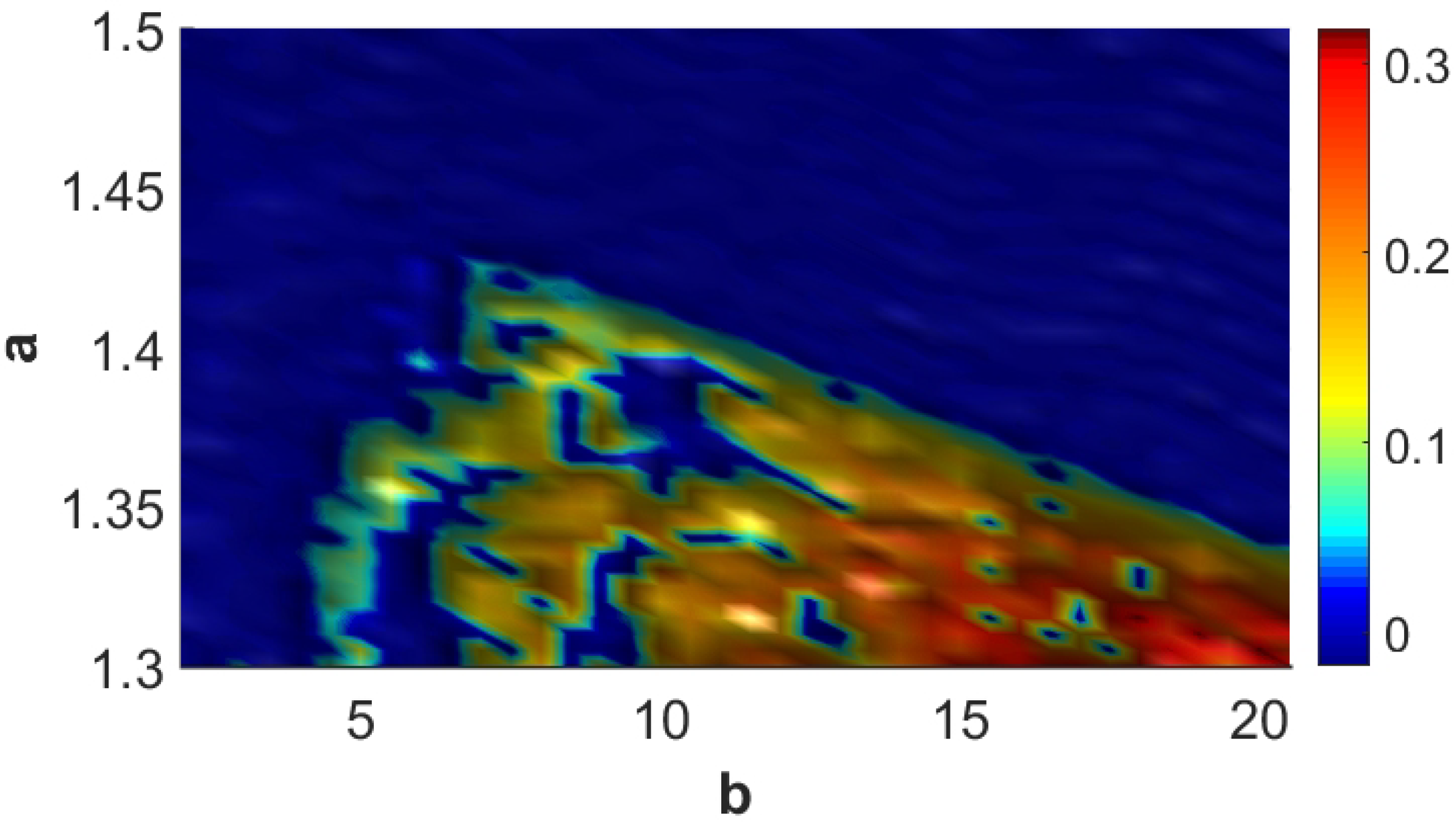
3. Bifurcation Analysis of the New Jerk System
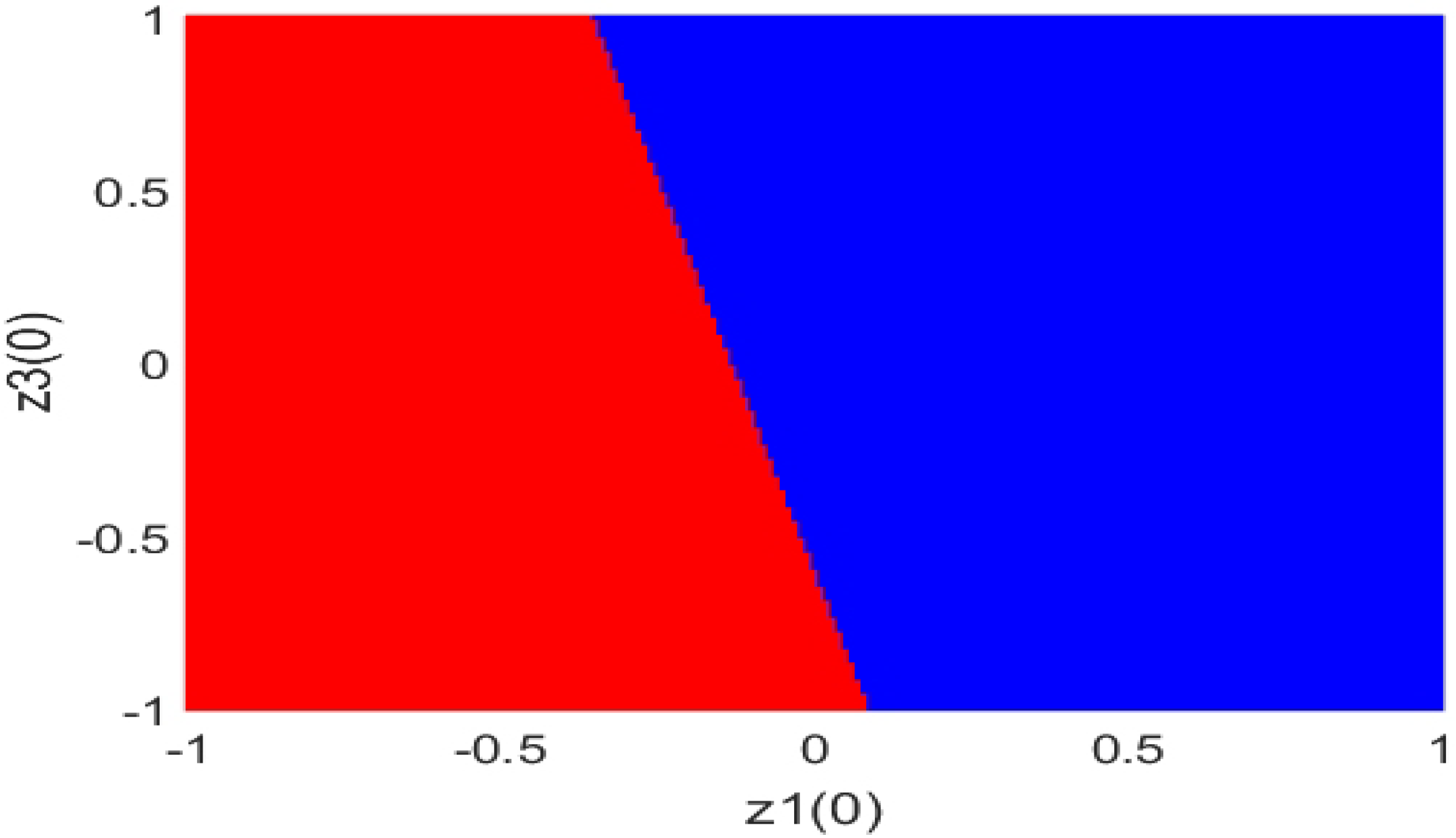
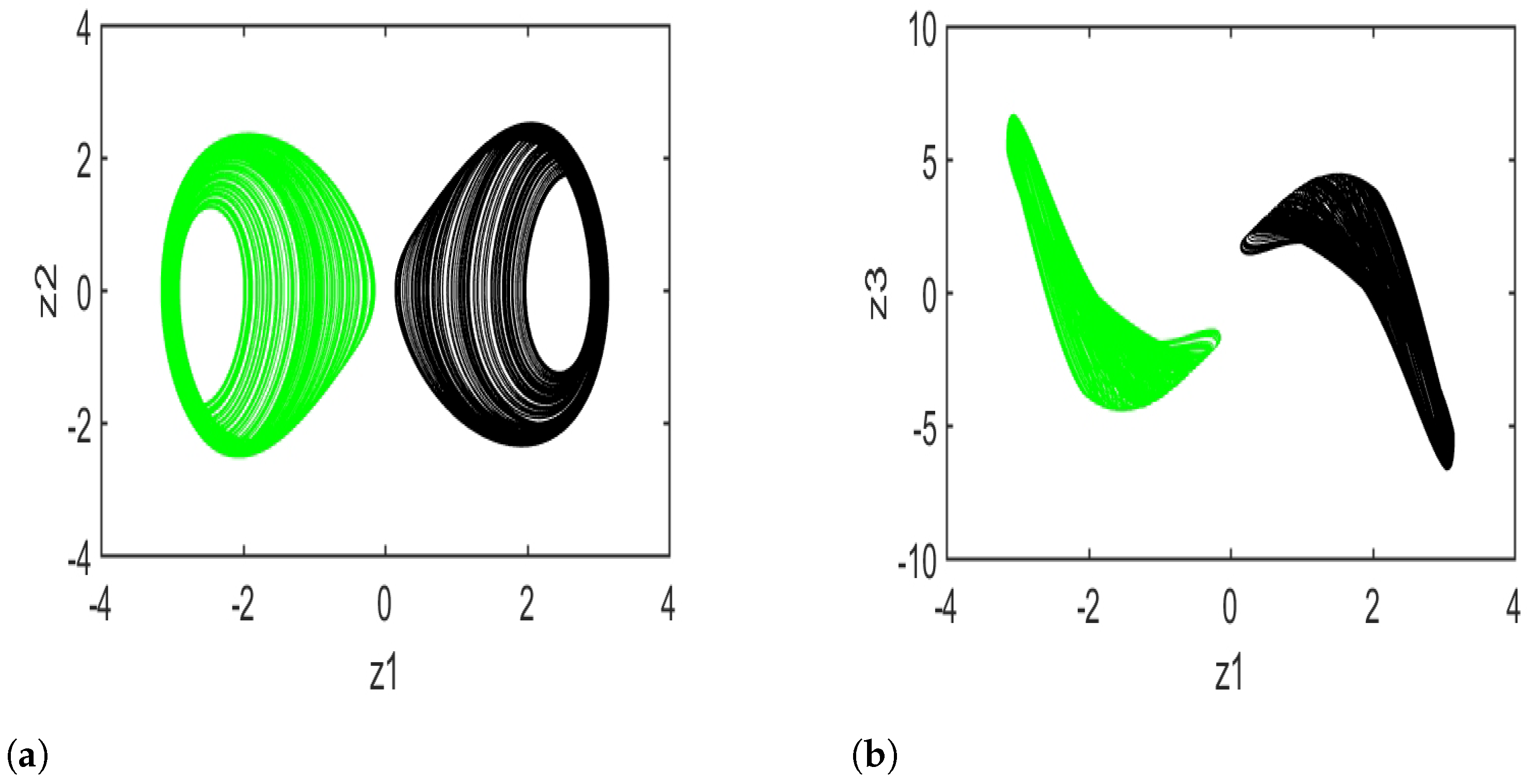
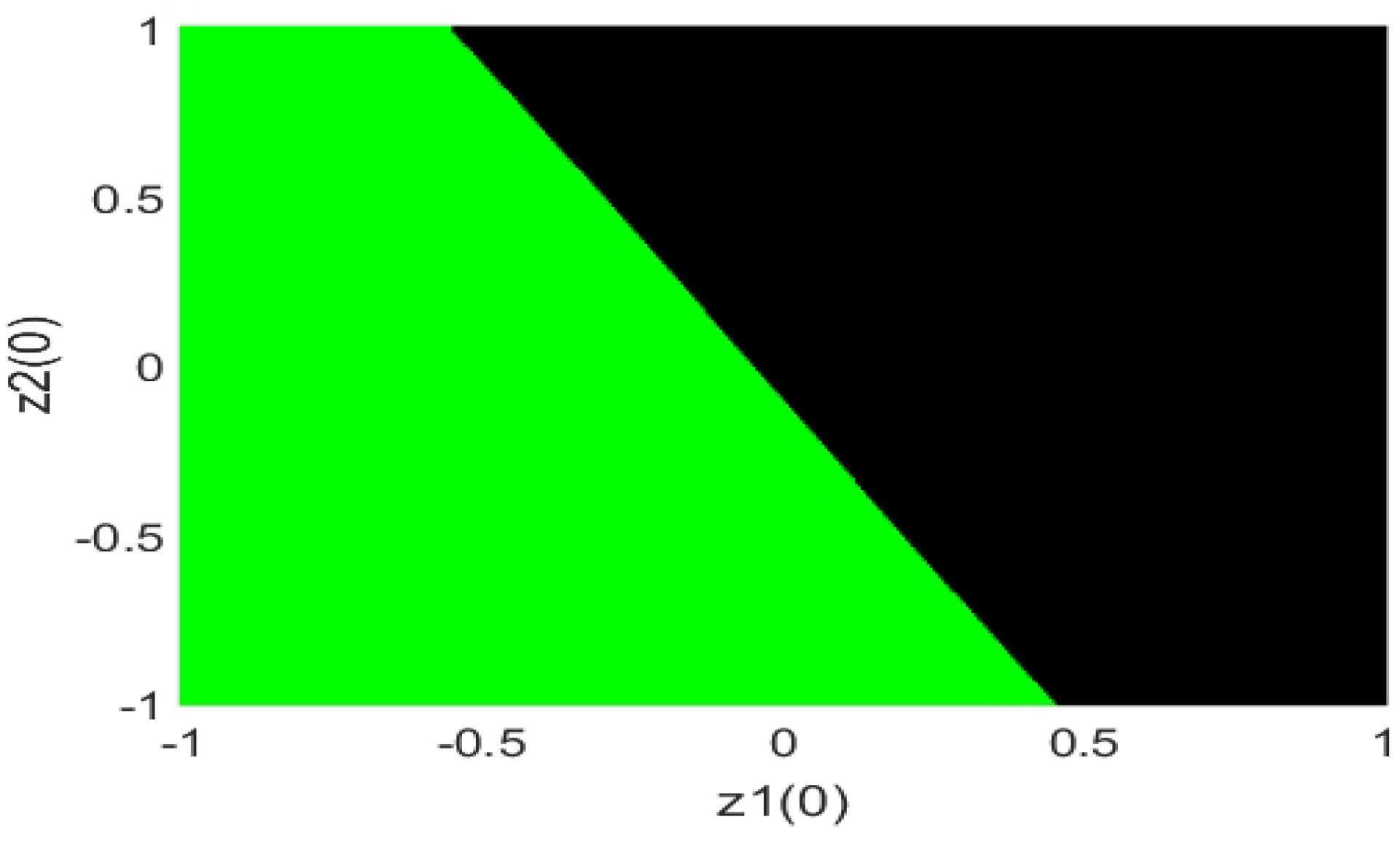
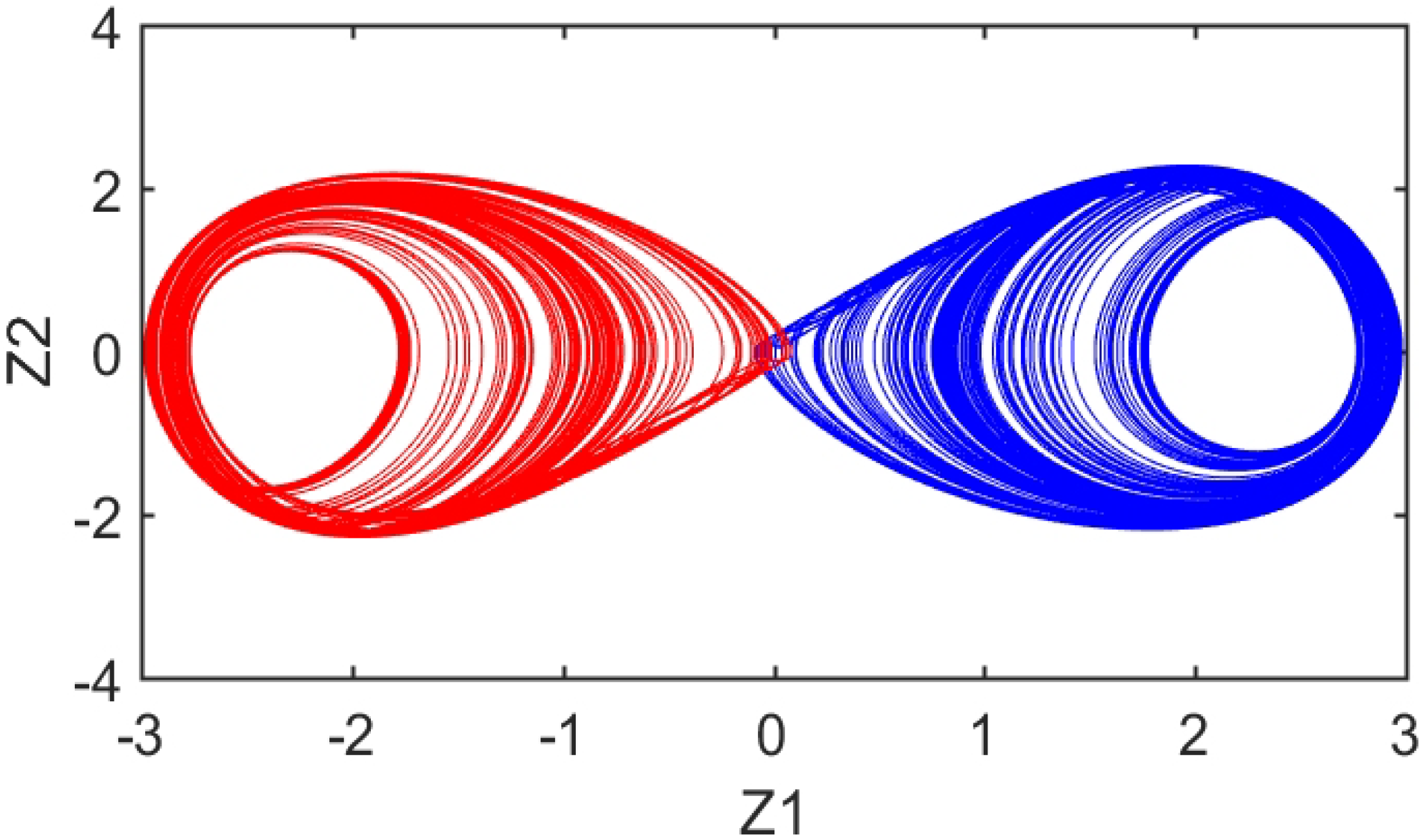
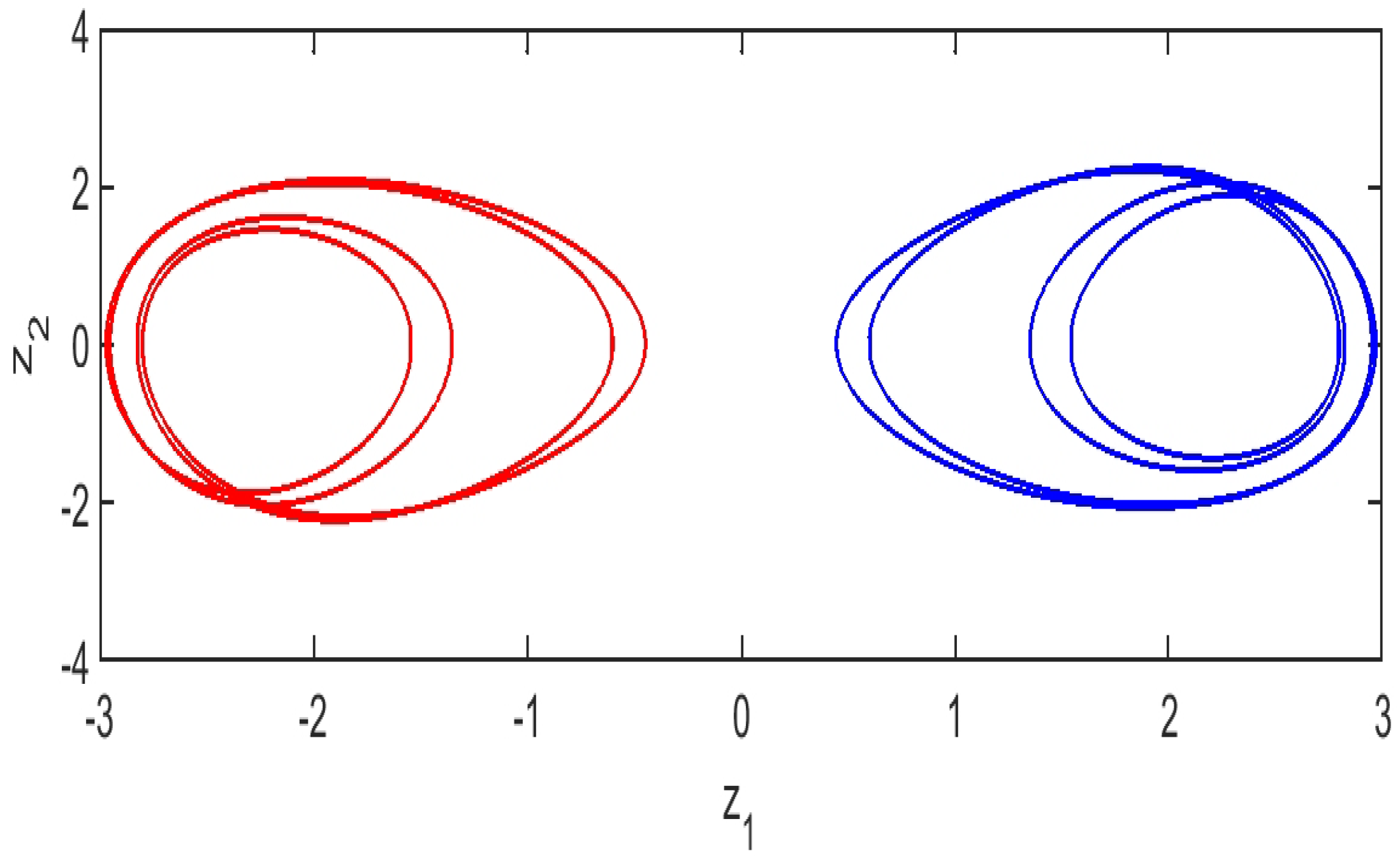
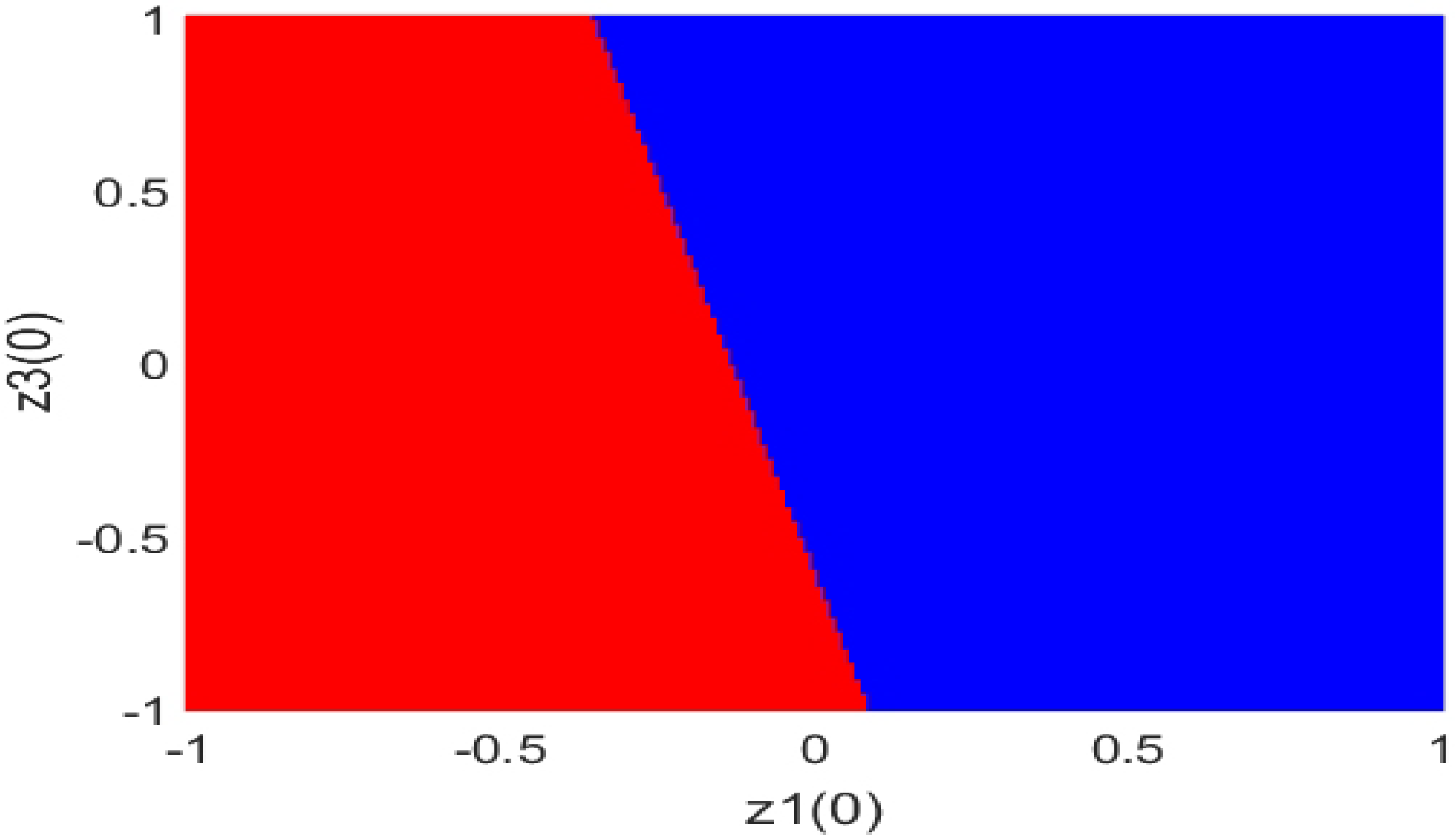
4. Multi-Stability and Coexistence of Attractors
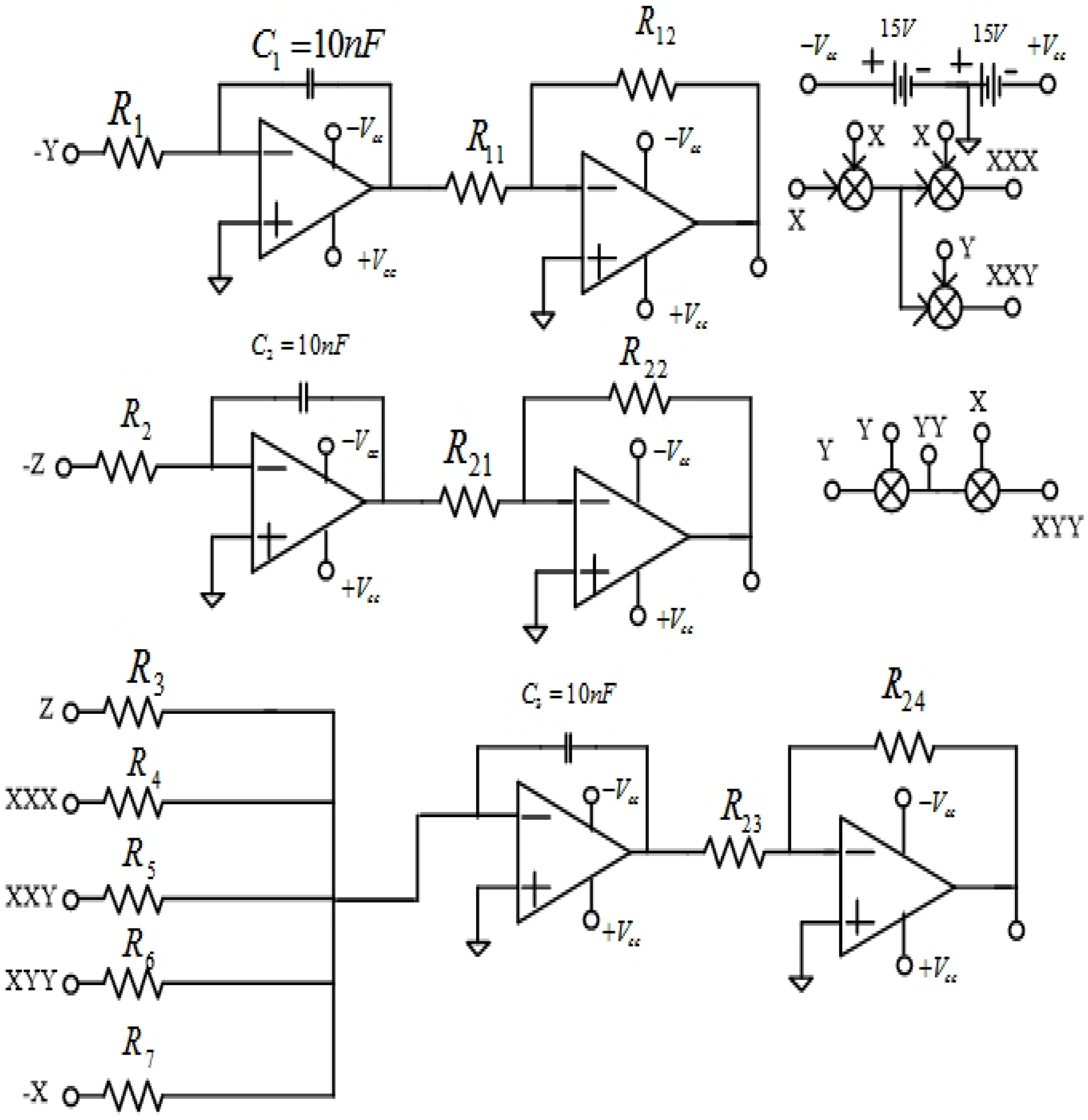
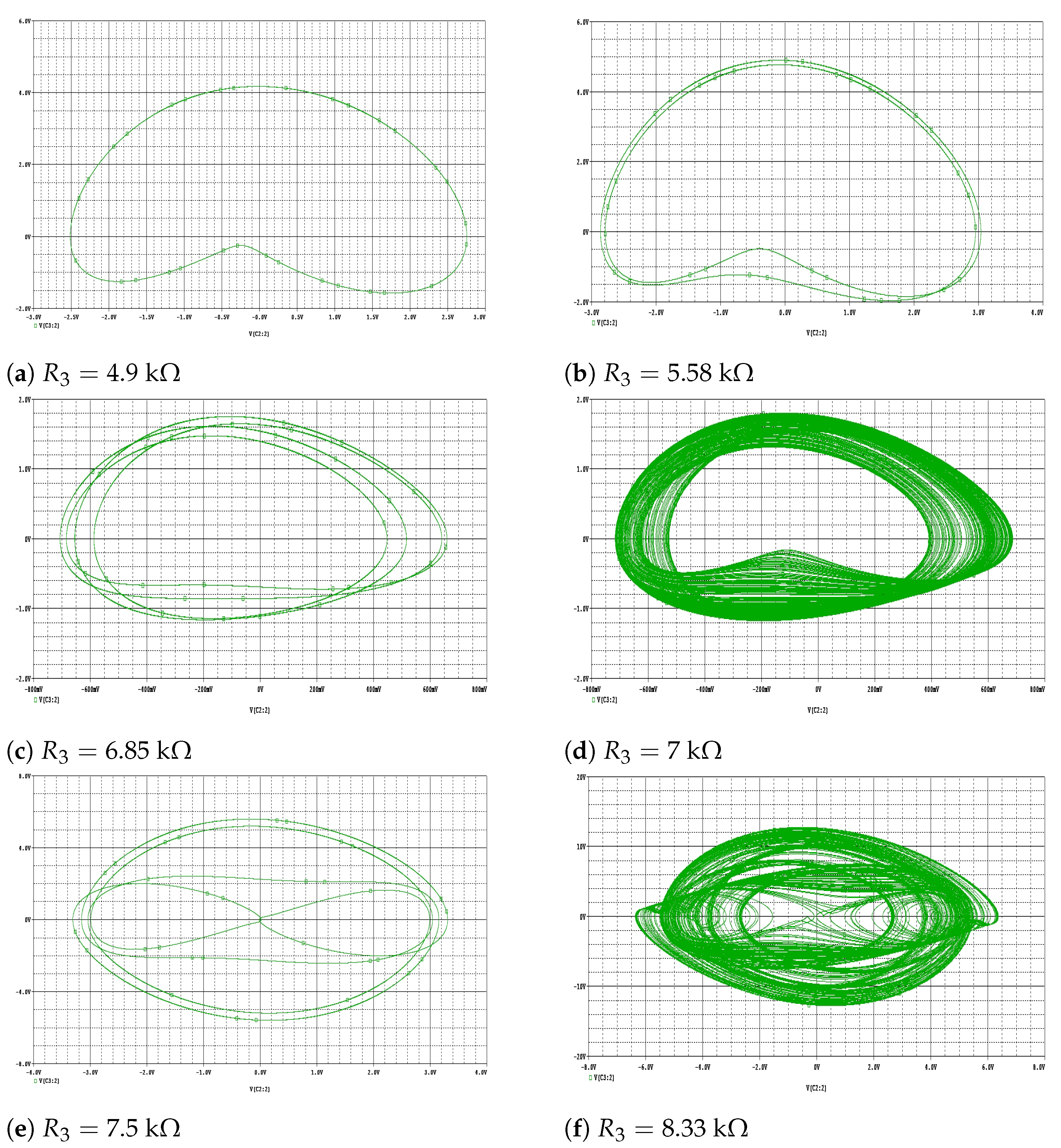
5. Circuit Simulation of the Jerk System
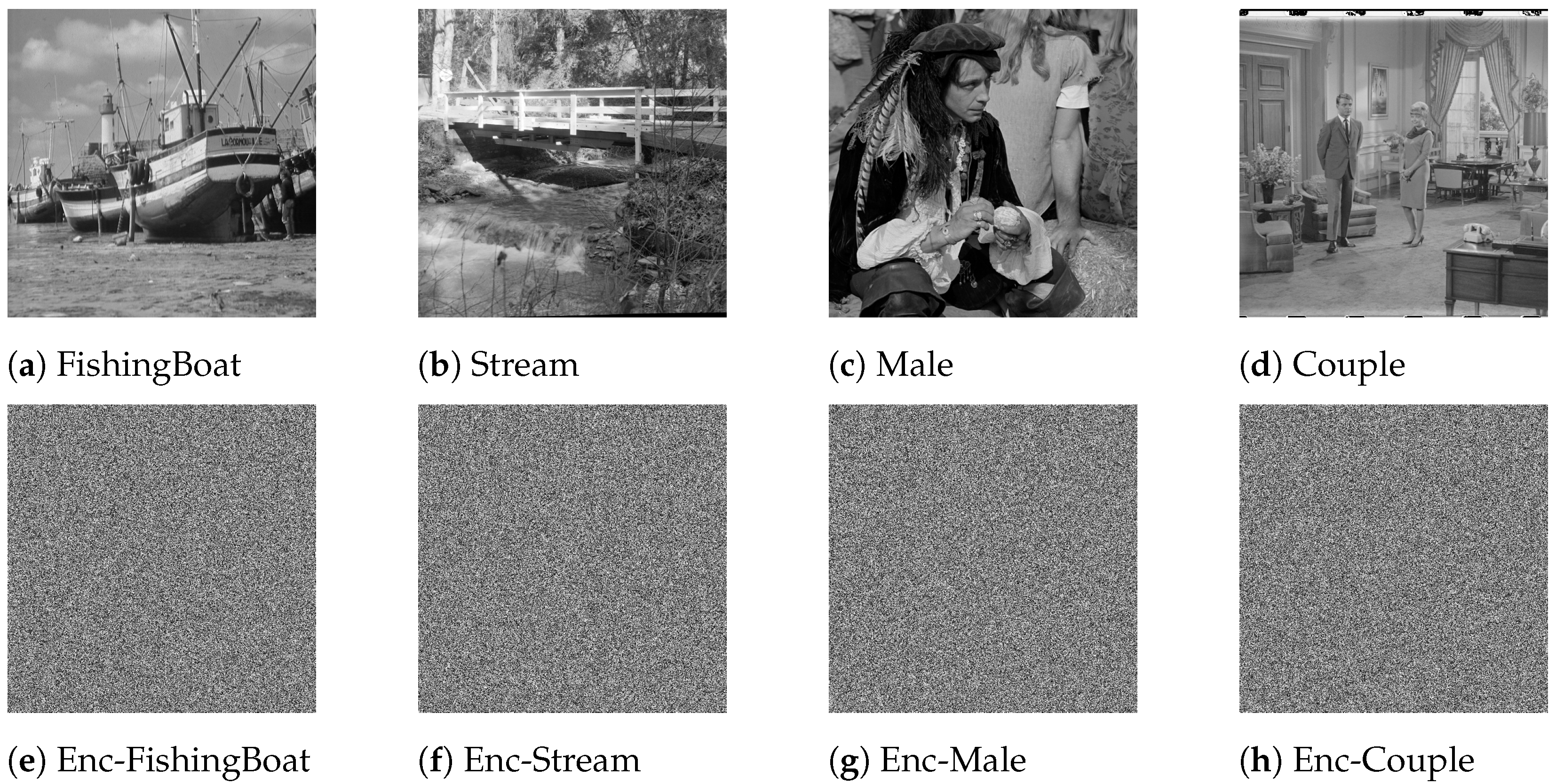
6. Encryption Algorithm and Its Performance
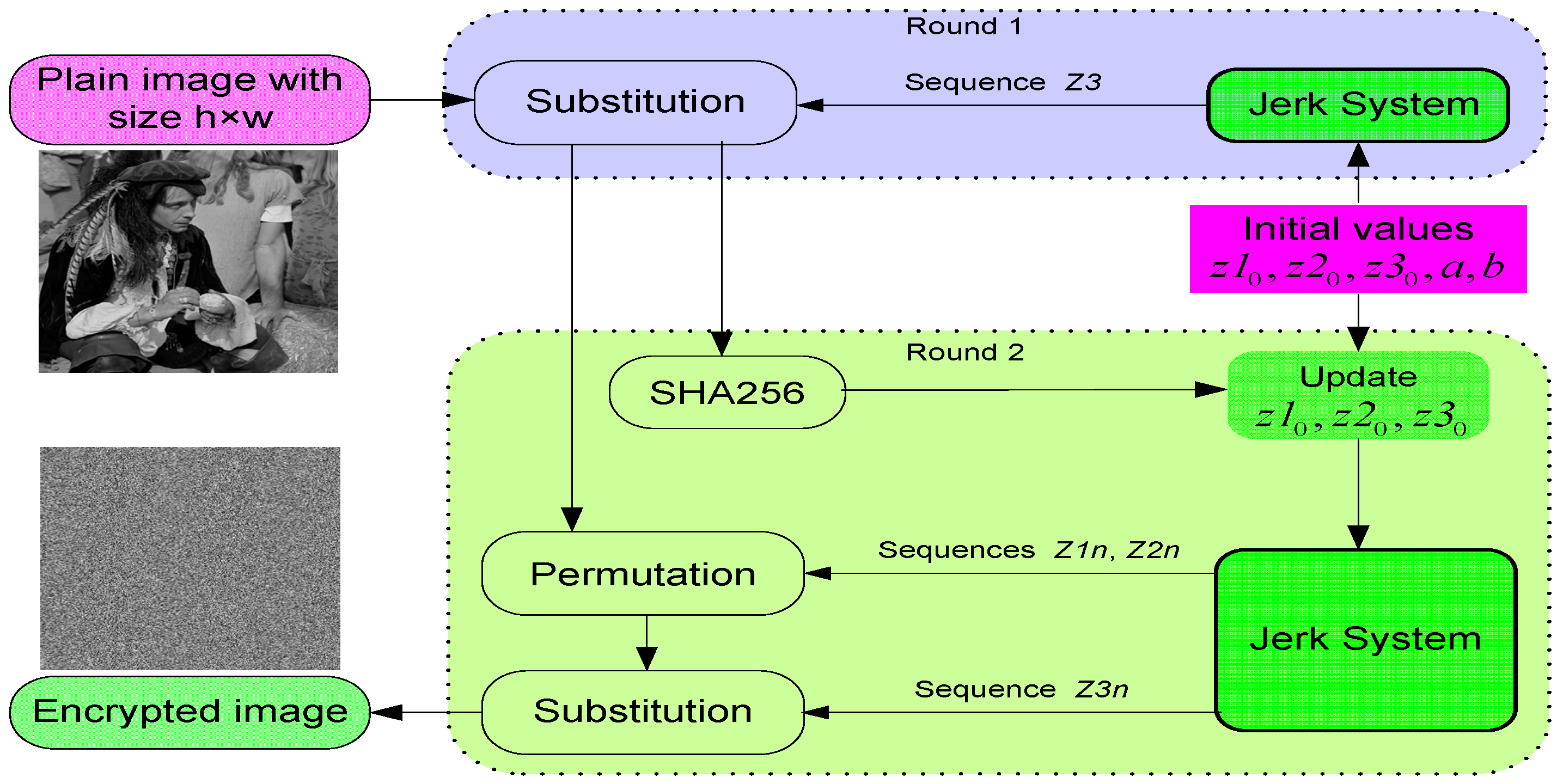
6.1. Proposed Encryption Algorithm
6.2. Performance Analysis
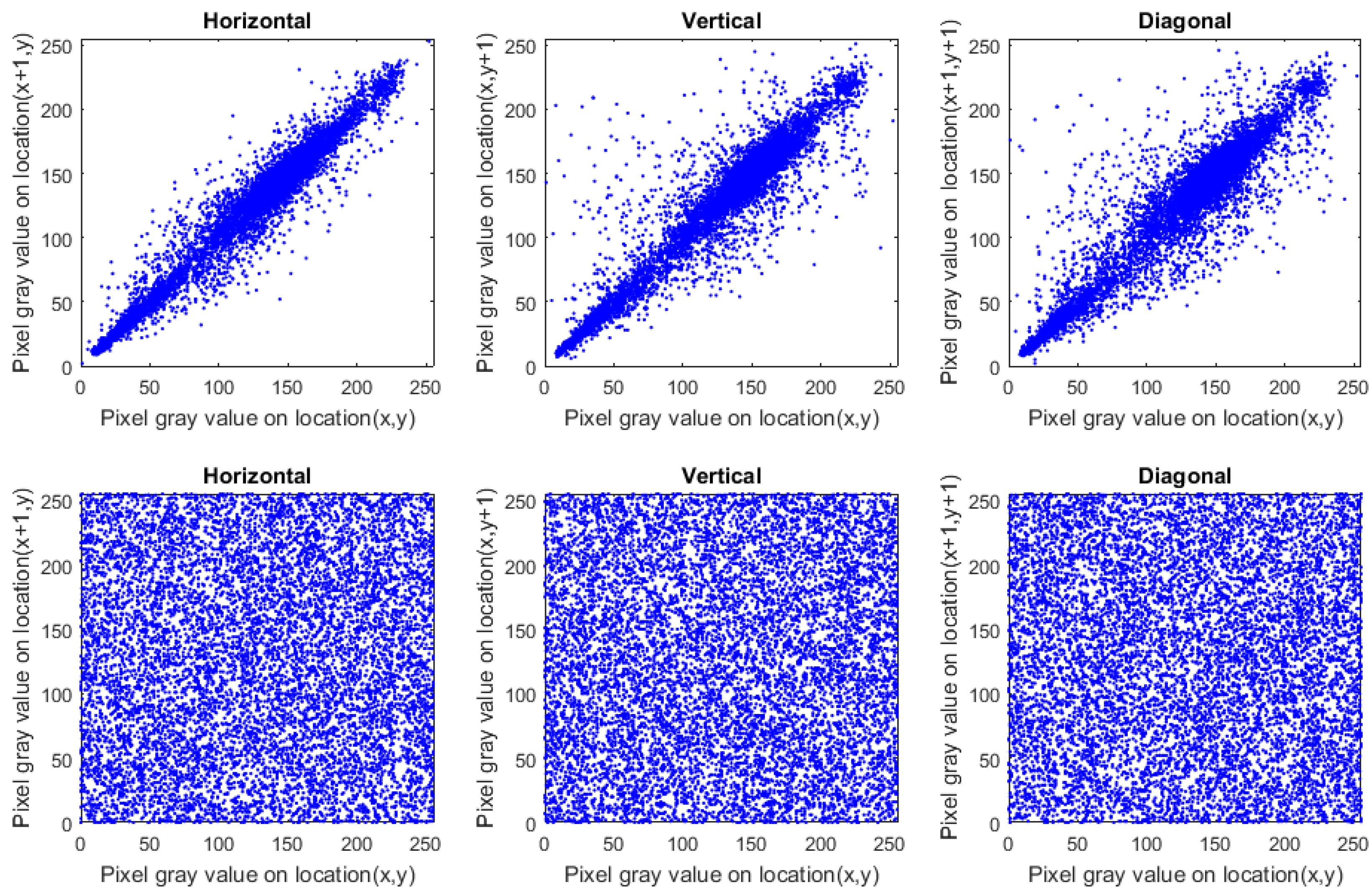
6.2.1. Correlation Analysis
6.2.2. Differential Analysis
6.2.3. Histogram Analysis
6.2.4. Information Entropy
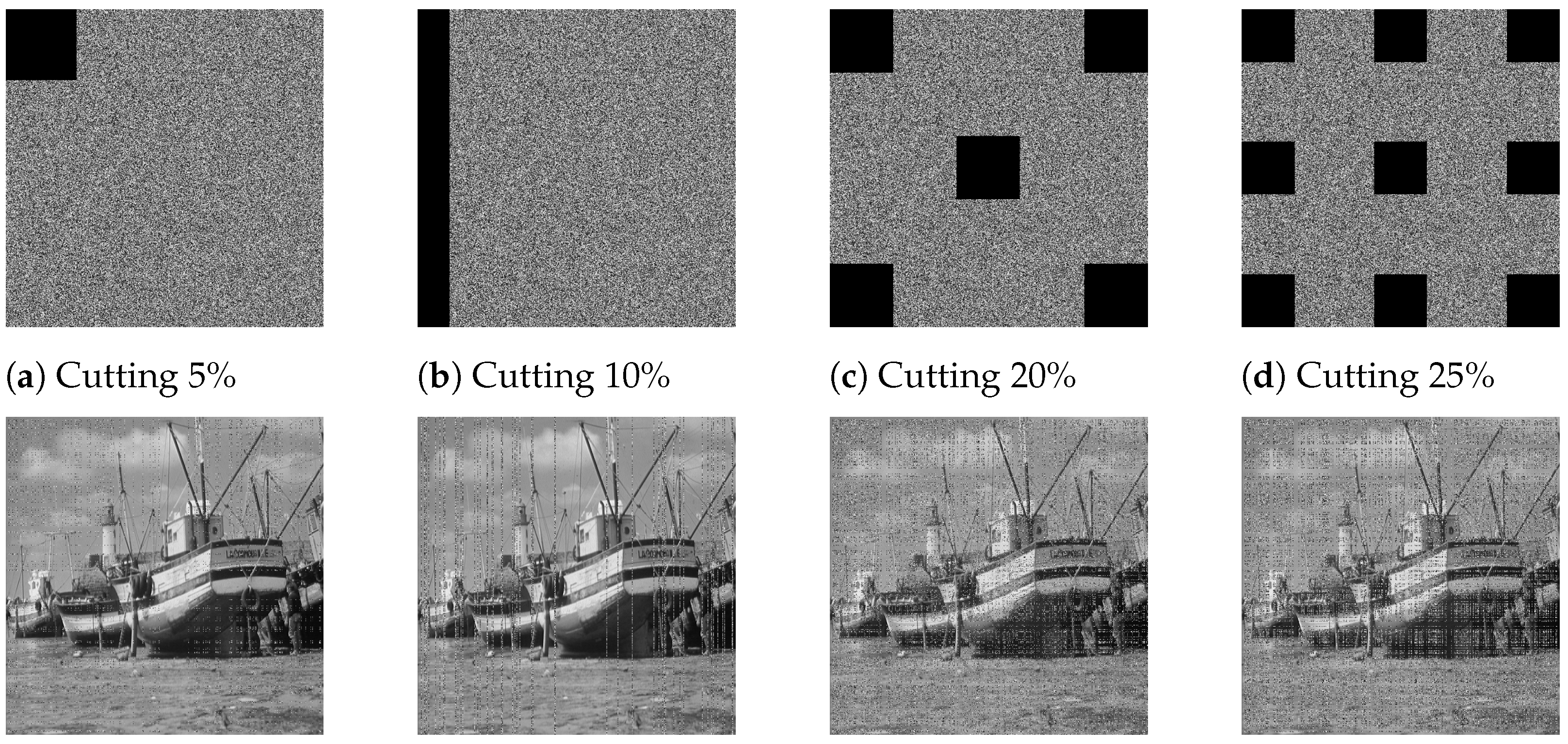
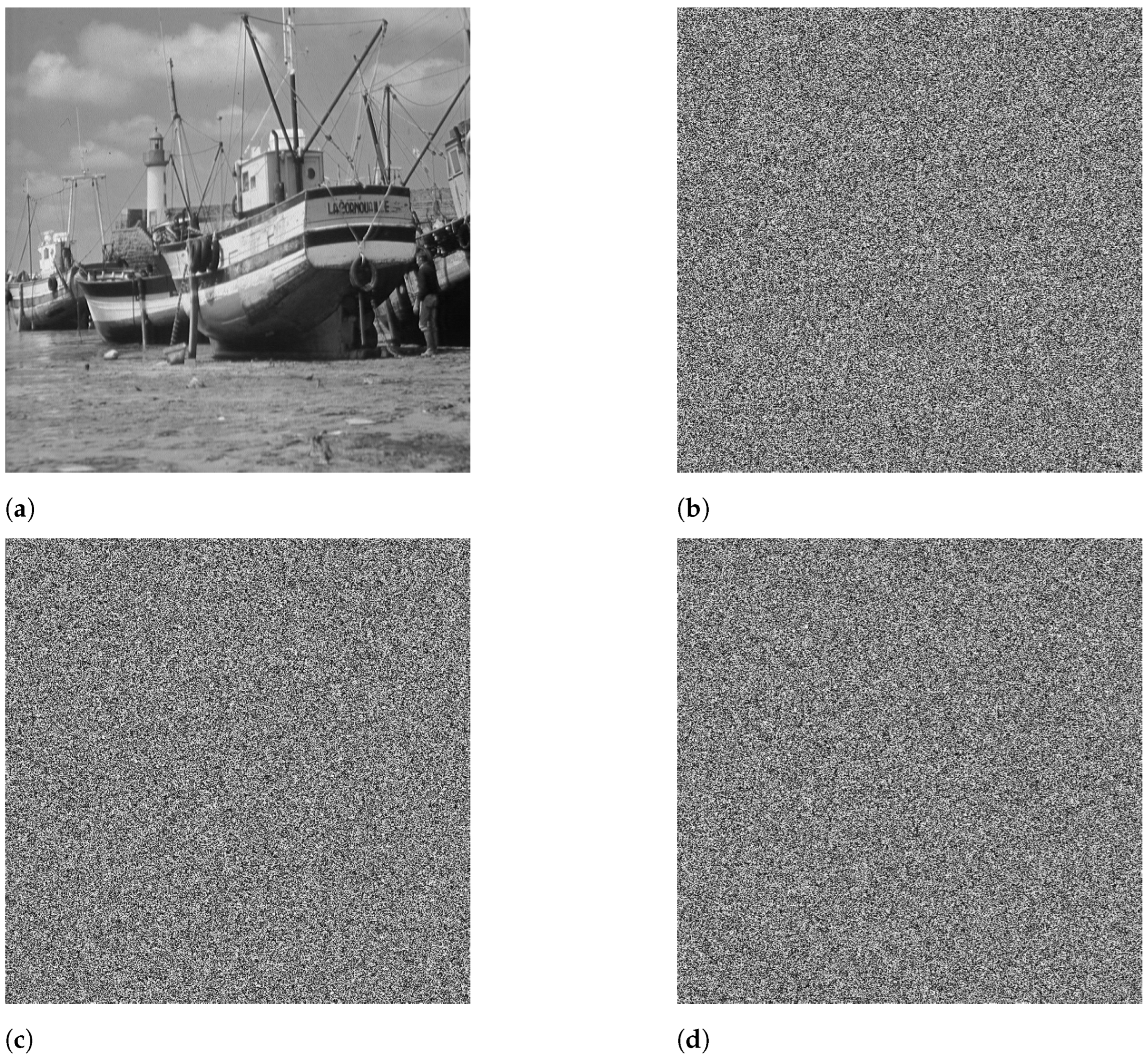
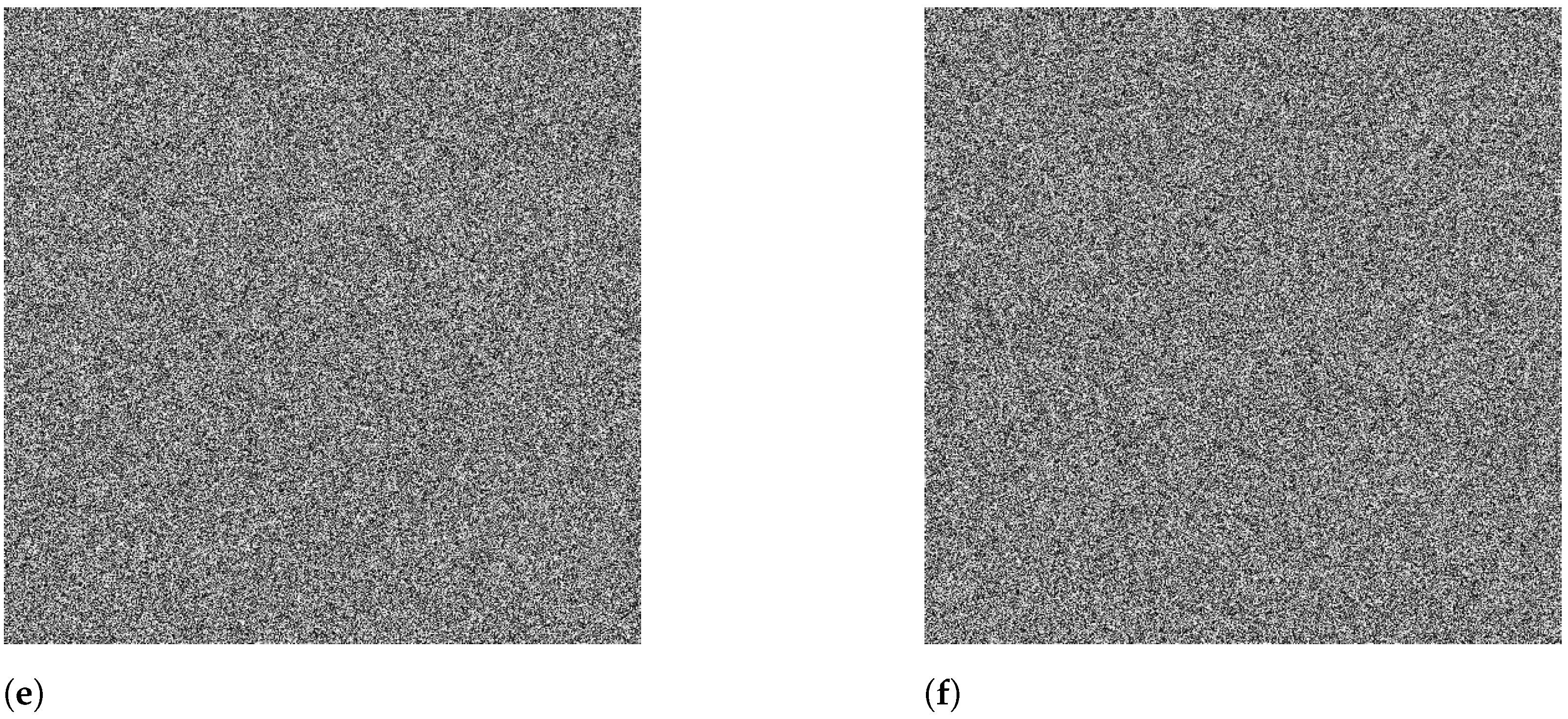
6.2.5. Occlusion Attack
6.2.6. Key Sensitivity
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Njimah, O.M.; Ramadoss, J.; Telem, A.N.K.; Kengne, J.; Rajagopal, K. Coexisting oscillations and four-scroll chaotic attractors in a pair of coupled memristor-based Duffing oscillators: Theoretical analysis and circuit simulation. Chaos Solitons Fractals 2023, 166, 112983. [Google Scholar] [CrossRef]
- Aggarwal, B.; Rai, S.K.; Sinha, A. New memristor-less, resistor-less, two-OTA based grounded and floating meminductor emulators and their applications in chaotic oscillators. Integration 2023, 88, 173–184. [Google Scholar] [CrossRef]
- Fan, W.; Chen, X.; Wu, H.; Li, Z.; Xu, Q. Firing patterns and synchronization of Morris-Lecar neuron model with memristive autapse. AEU—Int. J. Electron. Commun. 2023, 158, 154454. [Google Scholar] [CrossRef]
- Messadi, M.; Kemih, K.; Moysis, L.; Volos, C. A new 4D Memristor chaotic system: Analysis and implementation. Integration 2023, 88, 91–100. [Google Scholar] [CrossRef]
- Zhong, D.Z.; Zhao, K.K.; Hu, Y.L.; Zhang, J.B.; Deng, W.A.; Hou, P. Four-channels optical chaos secure communications with the rate of 400 Gb/s using optical reservoir computing based on two quantum dot spin-VCSELs. Opt. Commun. 2023, 529, 129109. [Google Scholar] [CrossRef]
- Xu, X.; Krisnanda, T.; Liew, T.C.H. Limit cycles and chaos in the hybrid atom-optomechanics system. Sci. Rep. 2022, 12, 15288. [Google Scholar] [CrossRef] [PubMed]
- Ramamoorthy, R.; Tsafack, N.; Saeed, N.; Kingni, S.T.; Rajagopal, K. Current modulation based vertical cavity surface emitting laser: System-on-chip realization and compressive sensing based image encryption. Opt. Quantum Electron. 2023, 55, 91. [Google Scholar] [CrossRef]
- Gomes, I.; Korneta, W.; Stavrinides, S.G.; Picos, R.; Chua, L.O. Experimental observation of chaotic hysteresis in Chua’s circuit driven by slow voltage forcing. Chaos Solitons Fractals 2023, 166, 112927. [Google Scholar] [CrossRef]
- Wang, Z.; Parastesh, F.; Tian, H.; Jafari, S. Symmetric synchronization behavior of multistable chaotic systems and circuits in attractive and repulsive couplings. Integration 2023, 89, 37–46. [Google Scholar] [CrossRef]
- Shah, N.A.; Ahmed, I.; Asogwa, K.K.; Zafar, A.A.; Weera, W.; Akgül, A. Numerical study of a nonlinear fractional chaotic Chua’s circuit. AIMS Math. 2023, 8, 1636–1655. [Google Scholar] [CrossRef]
- Ni, Y.; Wang, Z. Intermittent sampled-data control for exponential synchronization of chaotic delayed neural networks via an interval-dependent functional. Expert Syst. Appl. 2023, 223, 119918. [Google Scholar] [CrossRef]
- Sun, J.; Mao, T.; Wang, Y. Solution of simultaneous higher order equations based on DNA strand displacement circuit. IEEE Trans. NanoBiosci. 2022, 21, 511–519. [Google Scholar] [CrossRef] [PubMed]
- Gao, S.; Wu, R.; Wang, X.; Liu, J.; Li, Q.; Tang, X. EFR-CSTP: Encryption for face recognition based on the chaos and semi-tensor product theory. Inf. Sci. 2023, 621, 766–781. [Google Scholar] [CrossRef]
- Rashid, A.A.; Hussein, K.A. Image encryption algorithm based on the density and 6D logistic map. Int. J. Electr. Comput. Eng. 2023, 13, 1903–1913. [Google Scholar] [CrossRef]
- Alemami, Y.; Mohamed, M.A.; Atiewi, S. Advanced approach for encryption using advanced encryption standard with chaotic map. Int. J. Electr. Comput. Eng. 2023, 13, 1708–1723. [Google Scholar] [CrossRef]
- Ding, S.; Wang, N.; Bao, H.; Chen, B.; Wu, H.; Xu, Q. Memristor synapse-coupled piecewise-linear simplified Hopfield neural network: Dynamics analysis and circuit implementation. Chaos Solitons Fractals 2023, 166, 112899. [Google Scholar] [CrossRef]
- Xu, Q.; Chen, X.; Chen, B.; Wu, H.; Li, Z.; Bao, H. Dynamical analysis of an improved FitzHugh-Nagumo neuron model with multiplier-free implementation. Nonlinear Dyn. 2023, 111, 8737–8749. [Google Scholar] [CrossRef]
- Vaidyanathan, S.; Benkouider, K.; Sambas, A. A new multistable jerk chaotic system, its bifurcation analysis, backstepping control-based synchronization design and circuit simulation. Arch. Control Sci. 2022, 32, 123–152. [Google Scholar]
- Wang, Q.; Tian, Z.; Wu, X.; Tan, W. Coexistence of Multiple Attractors in a Novel Simple Jerk Chaotic Circuit with CFOAs Implementation. Front. Phys. 2022, 10, 835188. [Google Scholar] [CrossRef]
- Chase Harrison, R.; Rhea, B.K.; Oldag, A.R.; Dean, R.N.; Perkins, E. Experimental Validation of a Chaotic Jerk Circuit Based True Random Number Generator. Chaos Theory Appl. 2022, 4, 64–70. [Google Scholar] [CrossRef]
- Kamdem Tchiedjo, S.; Kamdjeu Kengne, L.; Kengne, J.; Djuidje Kenmoe, G. Dynamical behaviors of a chaotic jerk circuit based on a novel memristive diode emulator with a smooth symmetry control. Eur. Phys. J. Plus 2022, 137, 90. [Google Scholar] [CrossRef]
- Gakam Tegue, G.; Nkapkop, J.; Tsafack, N.; Abdel, M.; Kengne, J.; Ahmad, M.; Jiang, D.; Effa, J.; Tamba, J. A novel image encryption scheme based on compressive sensing, elliptic curves and a new jerk oscillator with multistability. Phys. Scr. 2022, 97, 125215. [Google Scholar] [CrossRef]
- Ramakrishnan, B.; Welba, C.; Chamgoué, A.C.; Karthikeyan, A.; Kingni, S.T. Autonomous jerk oscillator with sine nonlinearity and logistic map for sEMG encryption. Phys. Scr. 2022, 97, 095211. [Google Scholar] [CrossRef]
- Sprott, J.C. Some simple chaotic jerk functions. Am. J. Phys. 1997, 65, 537–543. [Google Scholar] [CrossRef]
- Sun, K.H.; Sprott, J.C. A simple jerk system with piecewise exponential nonlinearity. Int. J. Nonlinear Sci. Numer. Simul. 2000, 10, 1443–1450. [Google Scholar] [CrossRef]
- Liu, M.; Sang, B.; Wang, N.; Ahmad, I. Chaotic dynamics by some quadratic jerk systems. Axioms 2021, 10, 227. [Google Scholar] [CrossRef]
- Vaidyanathan, S.; Volos, C.K.; Kyprianidis, I.M.; Stouboulos, I.N.; Pham, V.T. Analysis, adaptive control and anti-synchronization of a six-term novel jerk chaotic system with two exponential nonlinearities and its circuit simulation. J. Eng. Sci. Technol. Rev. 2021, 8, 24–36. [Google Scholar] [CrossRef]
- Rajagopal, K.; Pham, V.T.; Tahir, F.R.; Akgul, A.; Abdolmohammadi, H.R.; Jafari, S. A chaotic jerk system with non-hyperbolic equilibrium: Dynamics, effect of time delay and circuit realisation. Pramana—J. Phys. 2018, 90, 52. [Google Scholar] [CrossRef]
- Abd-El-Atty, B. A robust medical image steganography approach based on particle swarm optimization algorithm and quantum walks. Neural Comput. Appl. 2023, 35, 773–785. [Google Scholar] [CrossRef]
- Kaur, M.; Singh, S.; Kaur, M. Computational Image Encryption Techniques: A Comprehensive Review. Math. Probl. Eng. 2021, 2021, 5012496. [Google Scholar] [CrossRef]
- Kumari, M.; Gupta, S. Performance comparison between Chaos and quantum-chaos based image encryption techniques. Multimed. Tools Appl. 2021, 80, 33213–33255. [Google Scholar] [CrossRef] [PubMed]
- Pham, V.T.; Vaidyanathan, S.; Volos, C.; Kapitaniak, T. Nonlinear Dynamical Systems with Self-Excited and Hidden Attractors; Springer: New York, NY, USA, 2018. [Google Scholar]
- Xu, Q.; Cheng, S.; Ju, Z.; Chen, M.; Wu, H. Asymmetric coexisting bifurcations and multi-stability in an asymmetric memristive diode-bridge-based jerk circuit. Chin. J. Phys. 2021, 70, 69–81. [Google Scholar] [CrossRef]
- Kumlu, D. USC-SIPI REPORT# 422 2012. Available online: https://sipi.usc.edu/database/database.php?volume=misc (accessed on 5 February 2023).
- Benkouider, K.; Vaidyanathan, S.; Sambas, A.; Tlelo-Cuautle, E.; El-Latif, A.A.A.; Abd-El-Atty, B.; Bermudez-Marquez, C.F.; Sulaiman, I.M.; Awwal, A.M.; Kumam, P. A New 5-D Multistable Hyperchaotic System With Three Positive Lyapunov Exponents: Bifurcation Analysis, Circuit Design, FPGA Realization and Image Encryption. IEEE Access 2022, 10, 90111–90132. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image | Direction | ||
|---|---|---|---|
| H | V | D | |
| FishingBoat | 0.9703 | 0.9355 | 0.9143 |
| Enc-FishingBoat | 0.0006 | −0.0004 | 0.0001 |
| Stream | 0.9265 | 0.9407 | 0.8985 |
| Enc-Stream | 0.0004 | −0.0007 | −0.0001 |
| Male | 0.9695 | 0.9615 | 0.9388 |
| Enc-Male | 0.0001 | −0.0008 | −0.0006 |
| Couple | 0.8836 | 0.9353 | 0.8542 |
| Enc-Couple | −0.0001 | −0.0009 | −0.0005 |
| Image | NPCR | UACI |
|---|---|---|
| FishingBoat | 99.61738% | 33.40942% |
| Stream | 99.61395% | 33.45551% |
| Male | 99.61509% | 33.53011% |
| Couple | 99.62539% | 33.44076% |
| Image | Chi-Square Value | Result |
|---|---|---|
| FishingBoat | 383,969.6875 | Varying |
| Stream | 1,185,618.3476 | Varying |
| Male | 158,413.5429 | Varying |
| Couple | 298,865.2441 | Varying |
| Enc-FishingBoat | 245.4551 | Uniform |
| Enc-Stream | 227.9434 | Uniform |
| Enc-Male | 279.8770 | Uniform |
| Enc-Couple | 246.9727 | Uniform |
| Image | Encrypted | Original |
|---|---|---|
| FishingBoat | 7.999325 | 7.191370 |
| Stream | 7.999372 | 5.705560 |
| Male | 7.999229 | 7.534507 |
| Couple | 7.999321 | 7.201008 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vaidyanathan, S.; Kammogne, A.S.T.; Tlelo-Cuautle, E.; Talonang, C.N.; Abd-El-Atty, B.; Abd El-Latif, A.A.; Kengne, E.M.; Mawamba, V.F.; Sambas, A.; Darwin, P.; et al. A Novel 3-D Jerk System, Its Bifurcation Analysis, Electronic Circuit Design and a Cryptographic Application. Electronics 2023, 12, 2818. https://doi.org/10.3390/electronics12132818
Vaidyanathan S, Kammogne AST, Tlelo-Cuautle E, Talonang CN, Abd-El-Atty B, Abd El-Latif AA, Kengne EM, Mawamba VF, Sambas A, Darwin P, et al. A Novel 3-D Jerk System, Its Bifurcation Analysis, Electronic Circuit Design and a Cryptographic Application. Electronics. 2023; 12(13):2818. https://doi.org/10.3390/electronics12132818
Chicago/Turabian StyleVaidyanathan, Sundarapandian, Alain Soup Tewa Kammogne, Esteban Tlelo-Cuautle, Cédric Noufozo Talonang, Bassem Abd-El-Atty, Ahmed A. Abd El-Latif, Edwige Mache Kengne, Vannick Fopa Mawamba, Aceng Sambas, P. Darwin, and et al. 2023. "A Novel 3-D Jerk System, Its Bifurcation Analysis, Electronic Circuit Design and a Cryptographic Application" Electronics 12, no. 13: 2818. https://doi.org/10.3390/electronics12132818
APA StyleVaidyanathan, S., Kammogne, A. S. T., Tlelo-Cuautle, E., Talonang, C. N., Abd-El-Atty, B., Abd El-Latif, A. A., Kengne, E. M., Mawamba, V. F., Sambas, A., Darwin, P., & Ovilla-Martinez, B. (2023). A Novel 3-D Jerk System, Its Bifurcation Analysis, Electronic Circuit Design and a Cryptographic Application. Electronics, 12(13), 2818. https://doi.org/10.3390/electronics12132818