
An AR Application for the Efficient Construction of Water Pipes Buried Underground


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Background
1.2. Research Objectives
2. System Configuration
2.1. Development Environment
2.2. Implementation of New Registration and Display Functions for Water Pipes
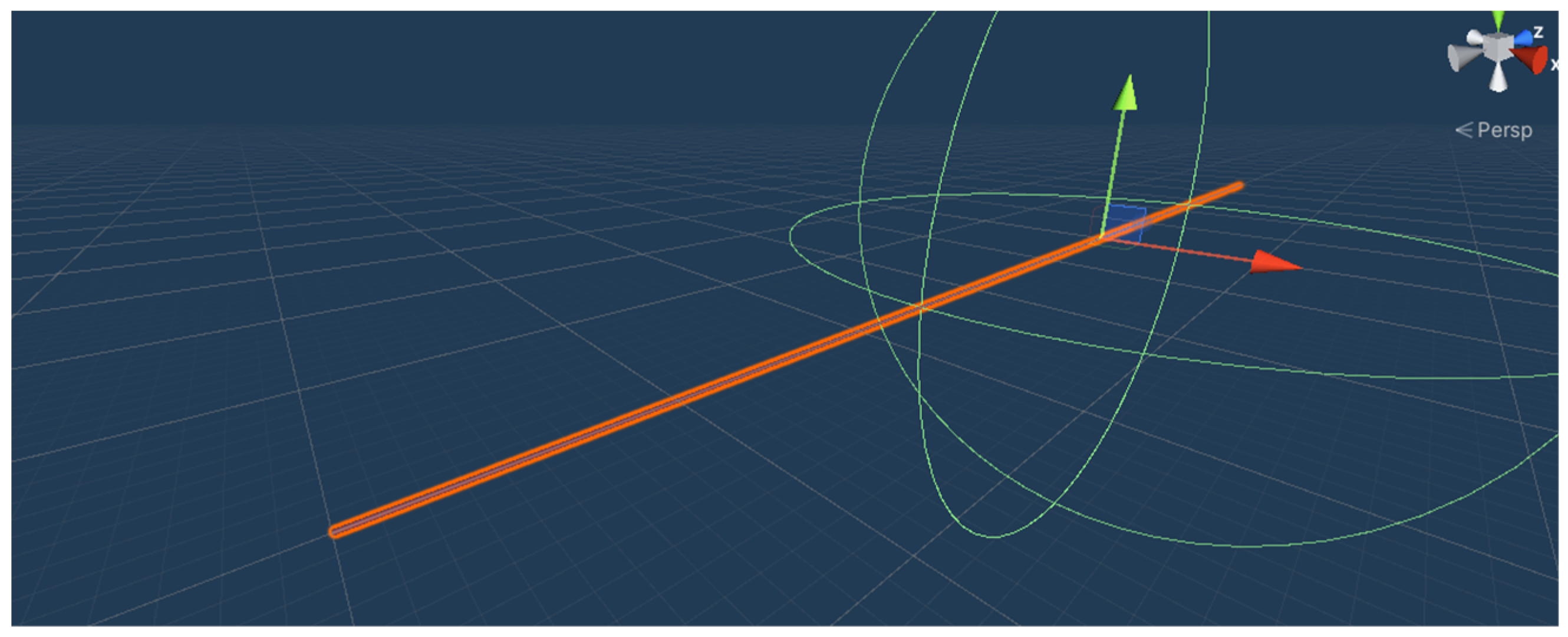
2.2.1. Creation of Water Pipe Model
2.2.2. Plane Detection Function
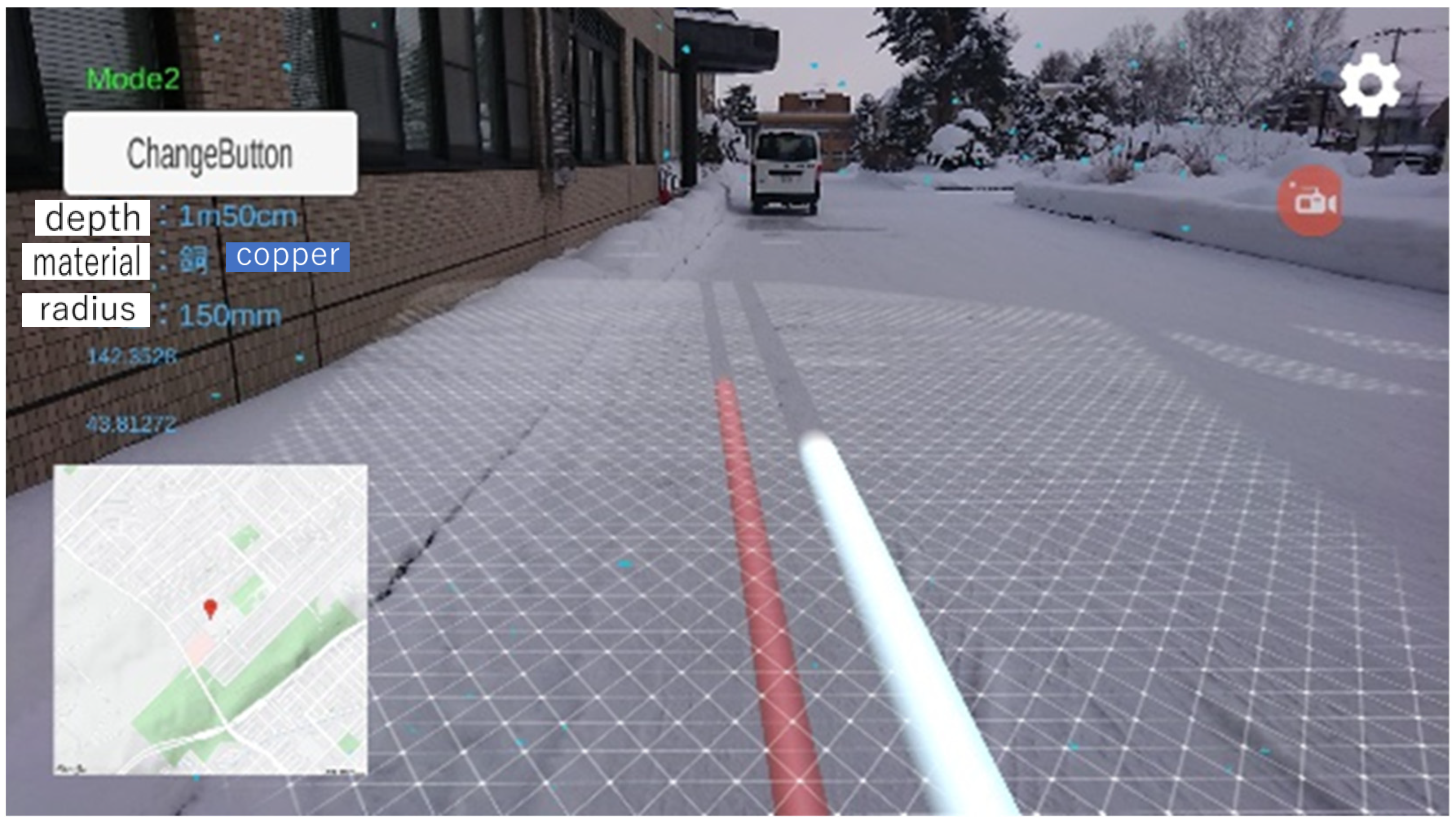
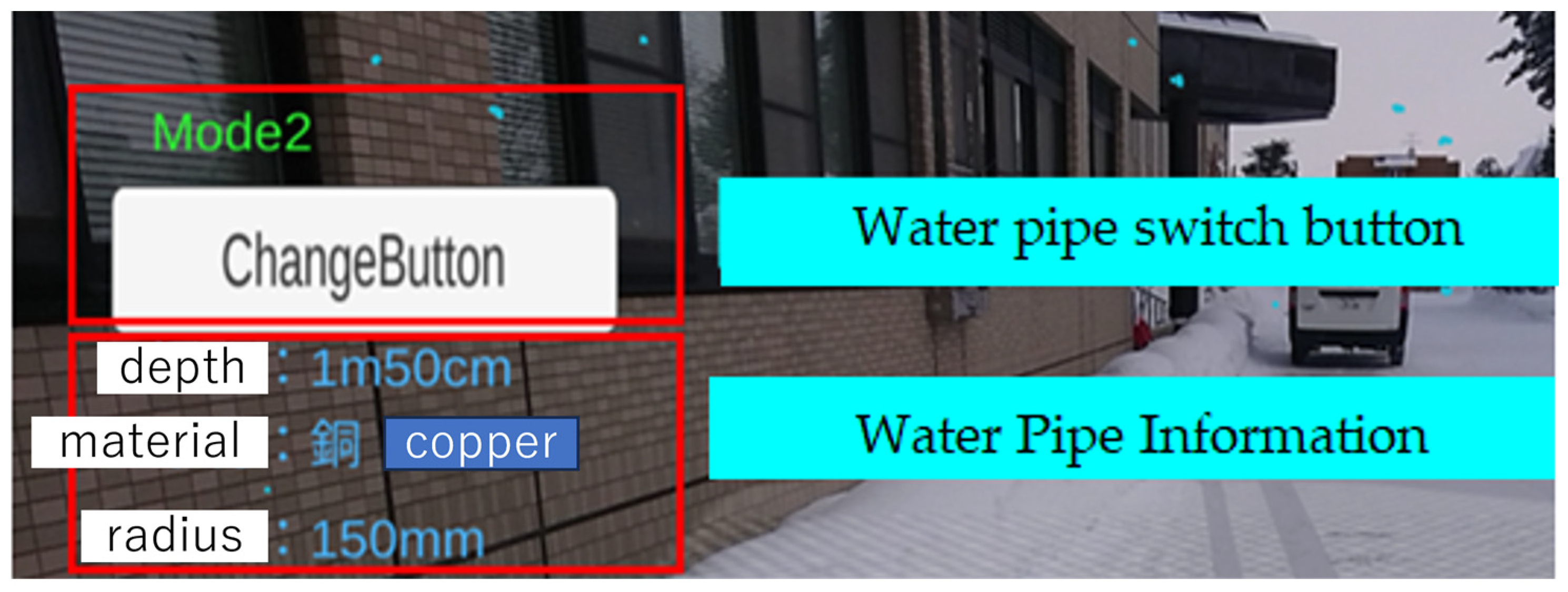
2.2.3. Application UI Creation
2.3. Acquisition and Display of Current Coordinates and Orientation
2.3.1. Google API Settings
2.3.2. Display of Google Map Corresponding to Your Current Location
2.4. Input and Conversion of Water Pipe Information
2.4.1. GIS (Geographic Information System)
2.4.2. SHP File
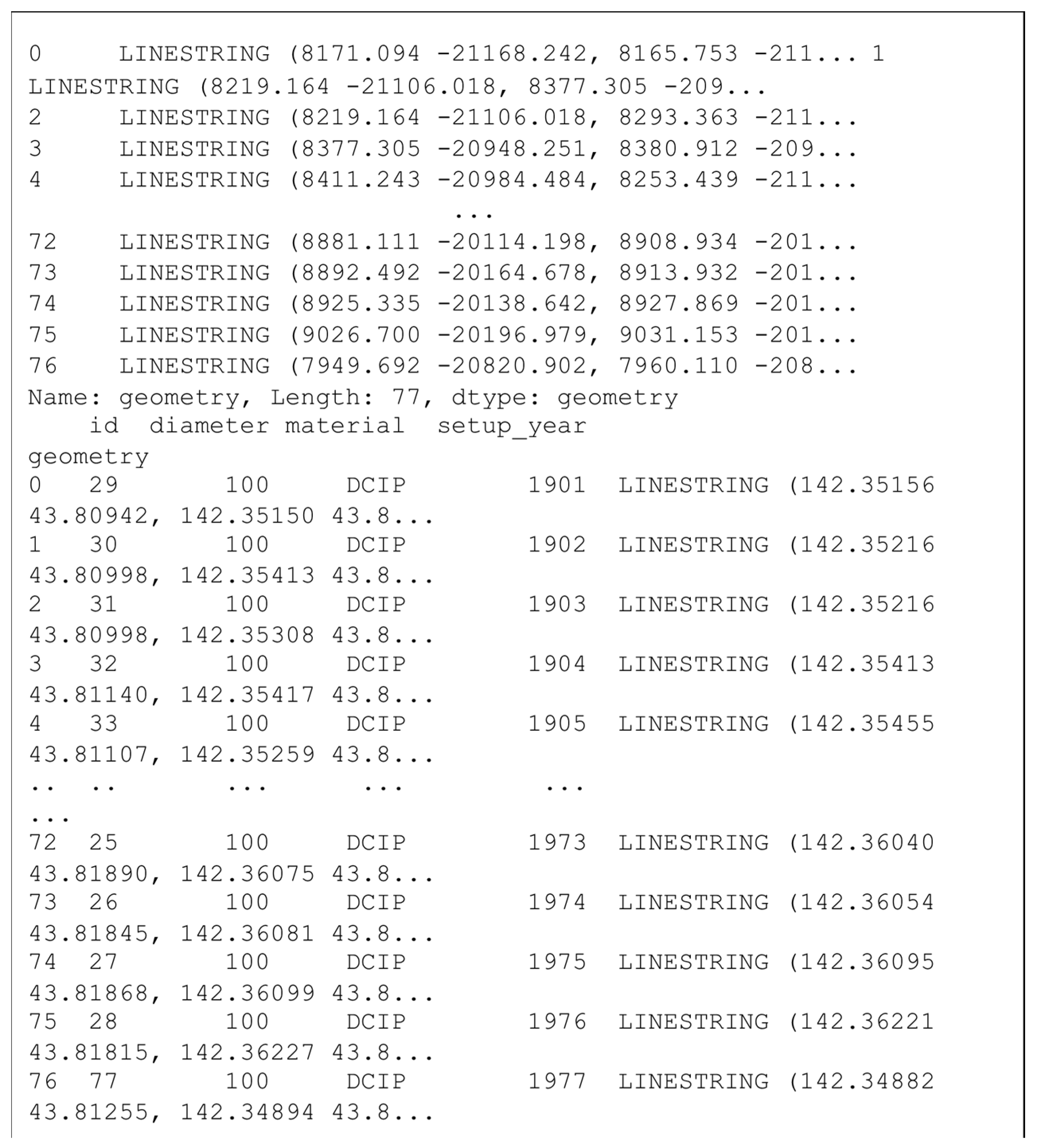
2.4.3. Reading Location Information from GIS Data
2.4.4. Conversion from Paper Drawings to Digital Data
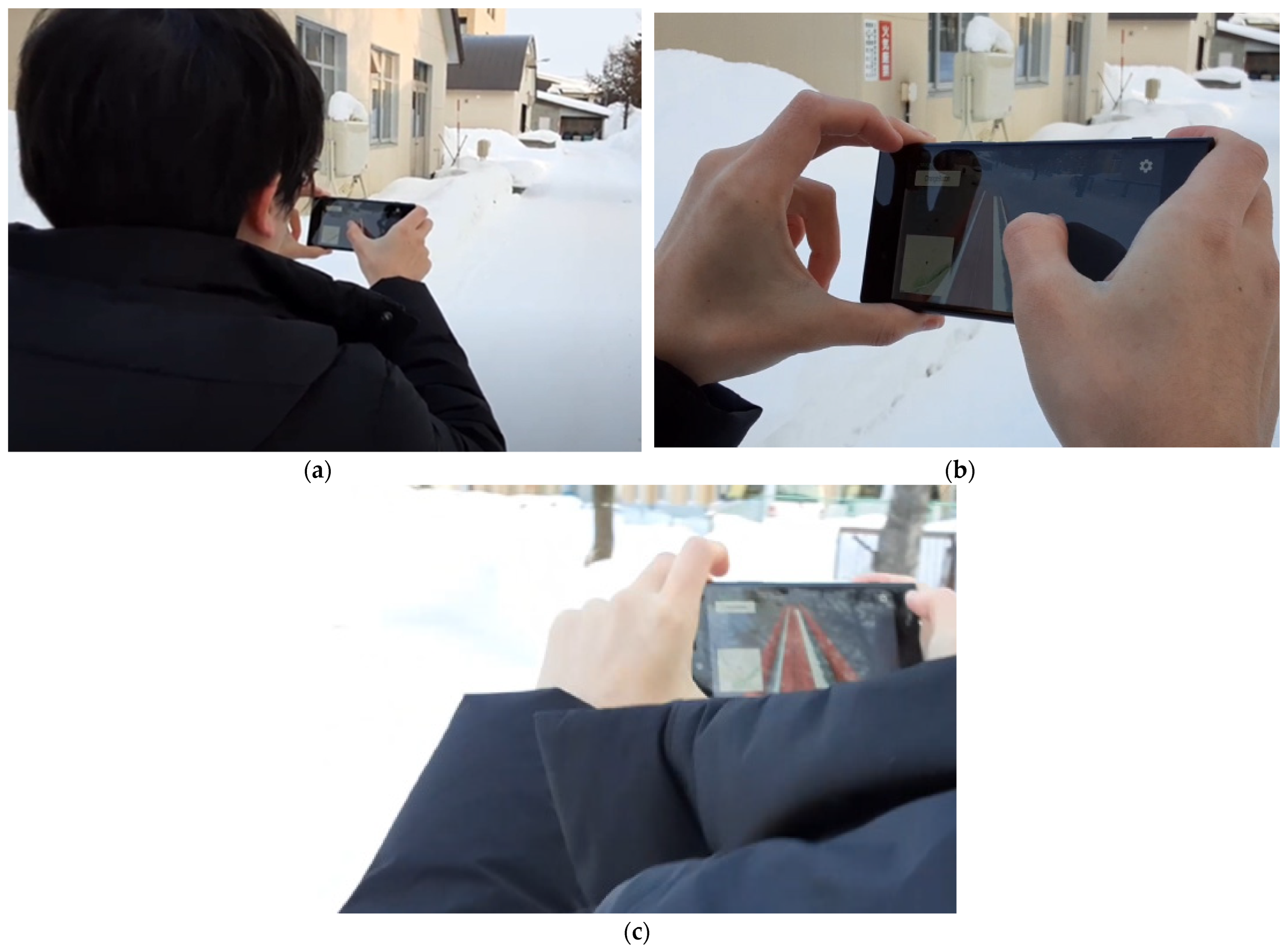
3. System Evaluation
3.1. Water Pipe Visualization Results
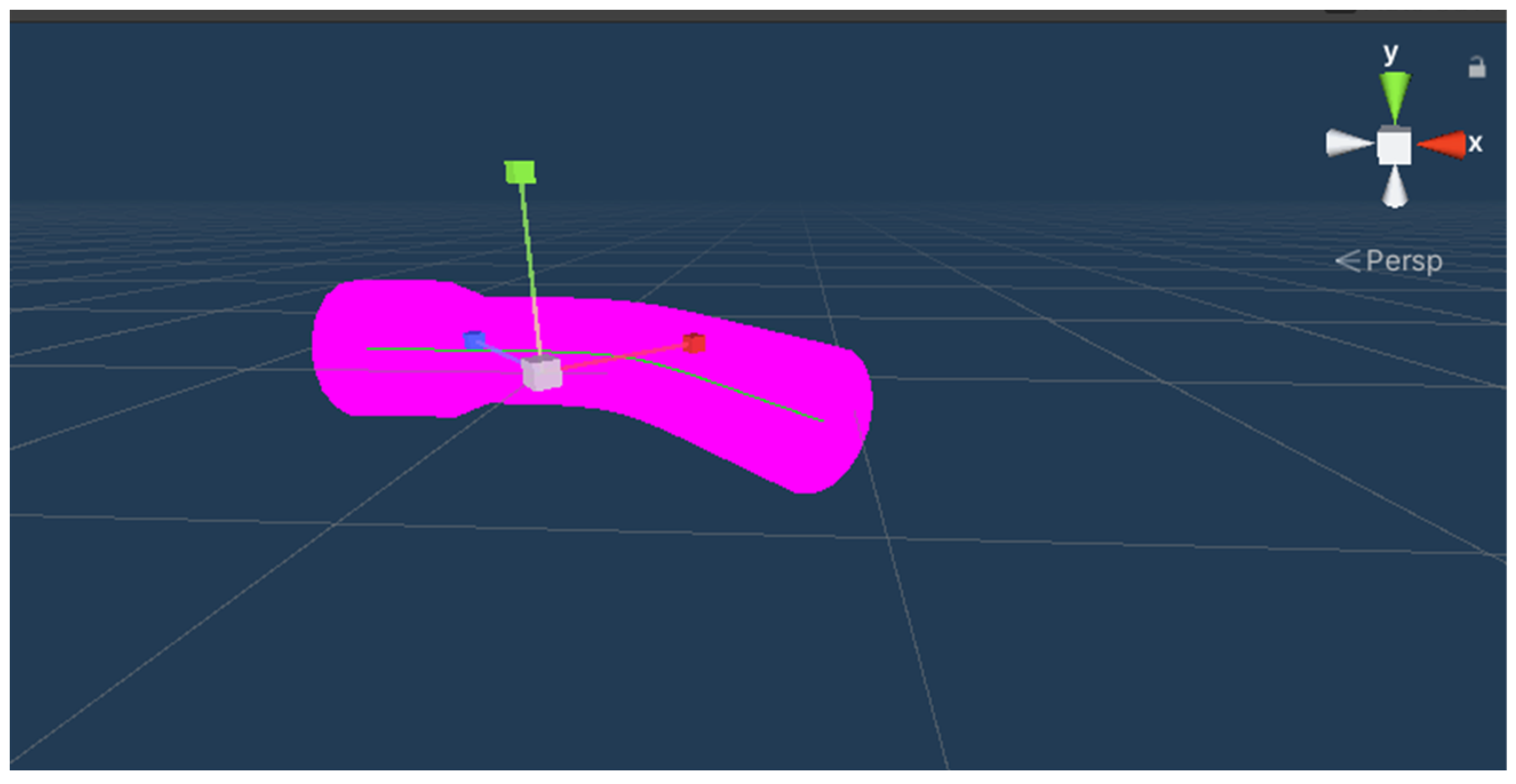
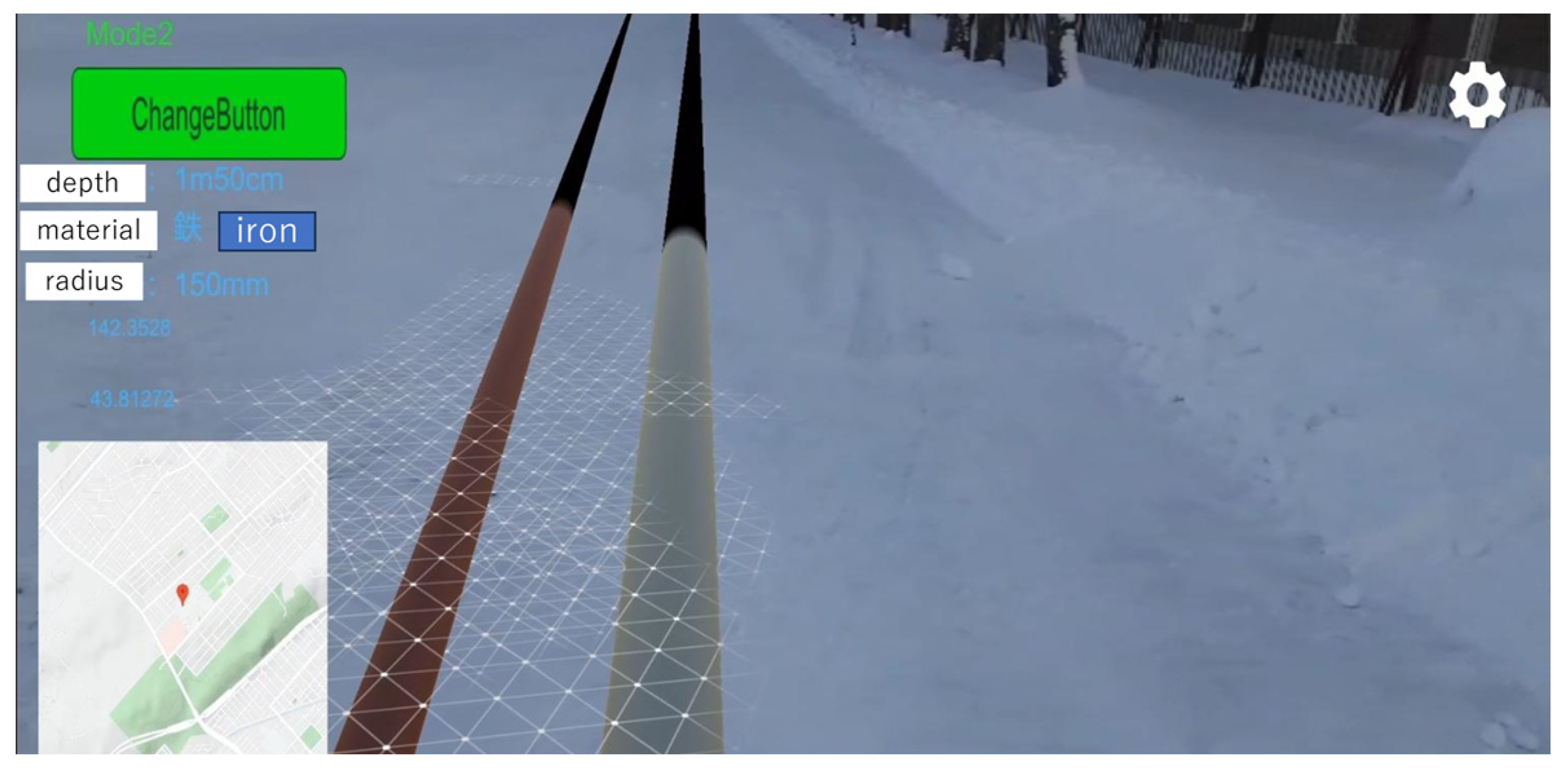
3.2. Result of Displaying Water Pipe Model
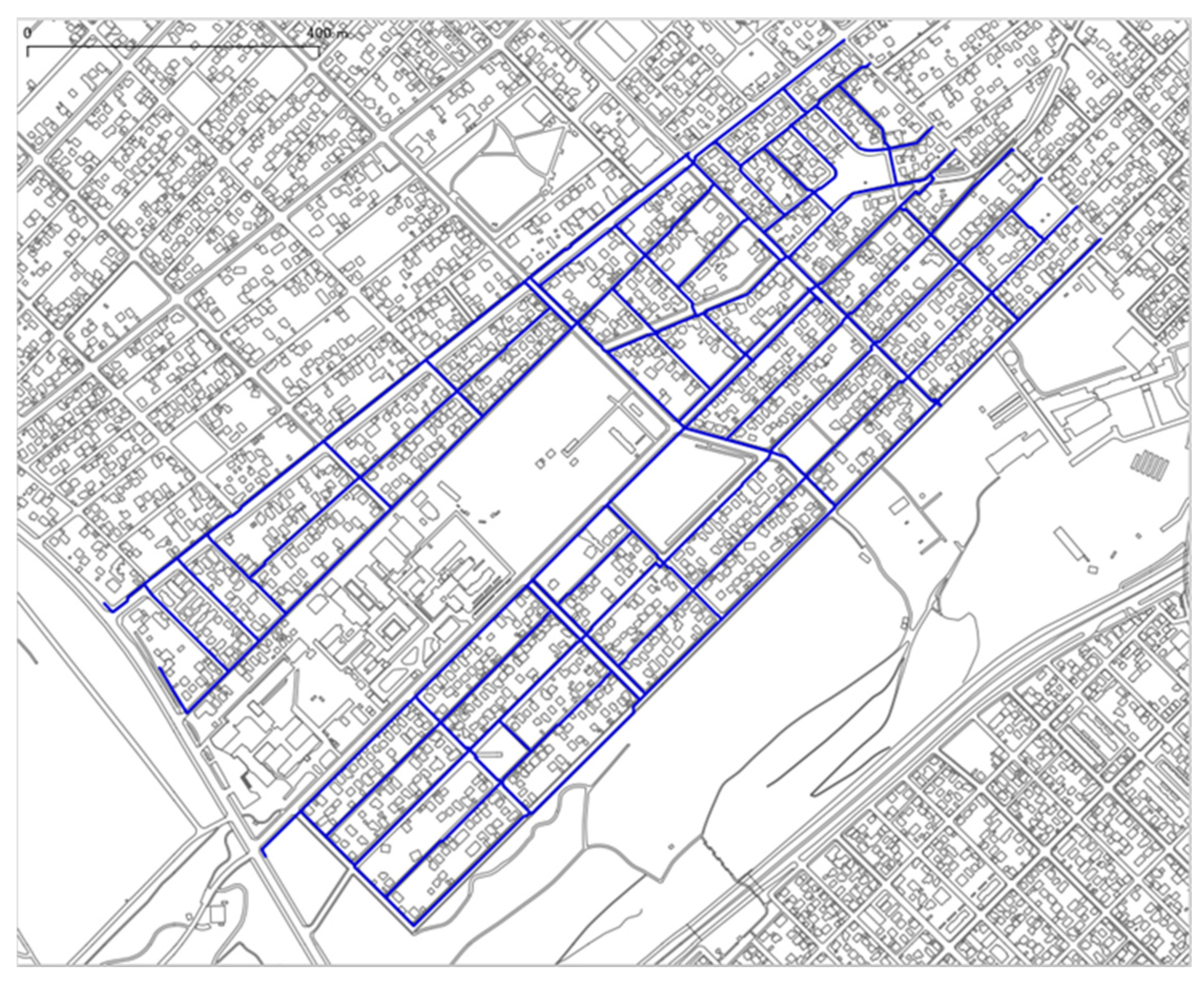
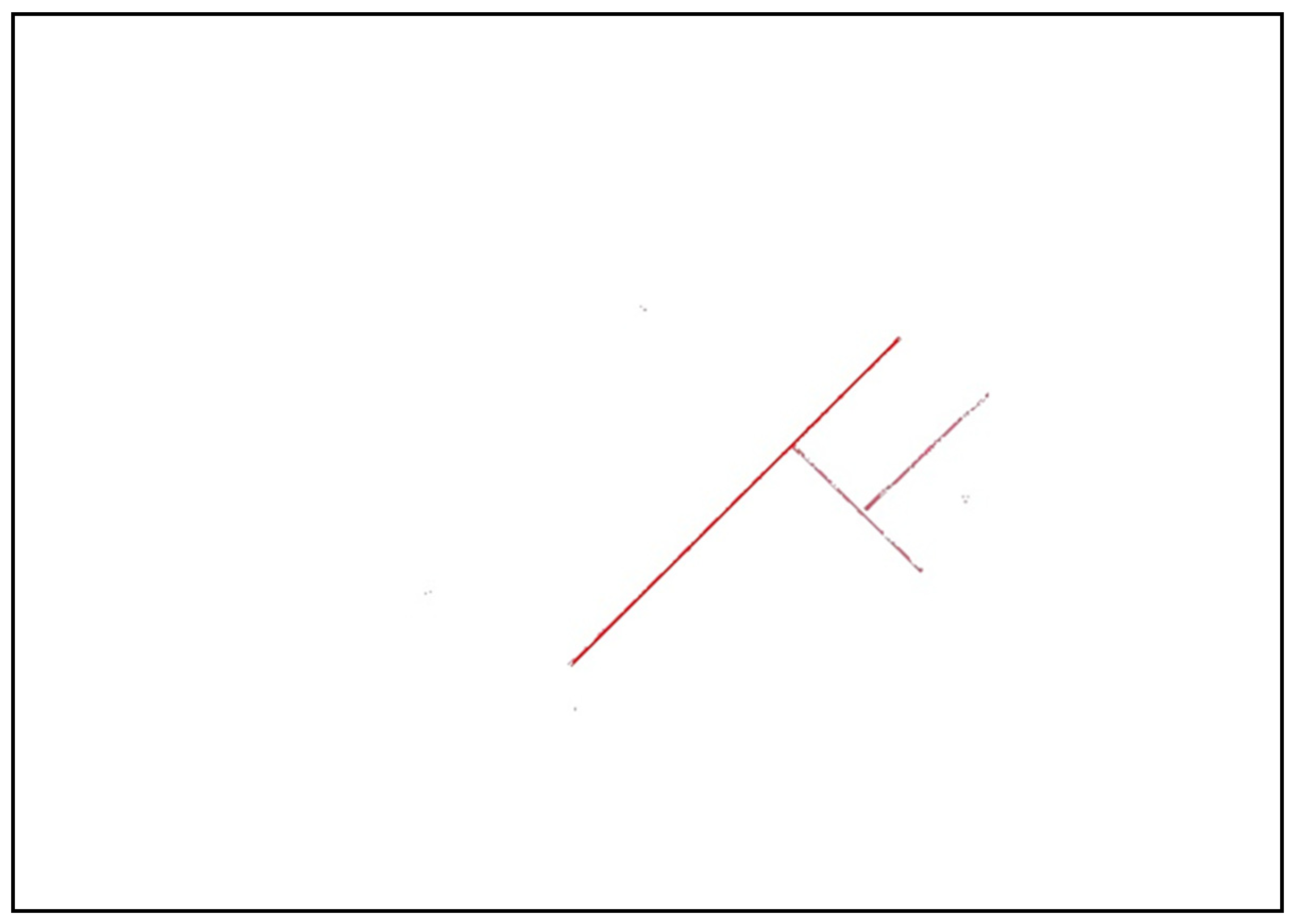
3.3. Results of the Conversion Function from Digital Water Pipe Information to Location Information
3.4. Results of the Conversion Function from Analog Water Pipe Information to Location Information
3.5. Improvement of Location Information Acquisition
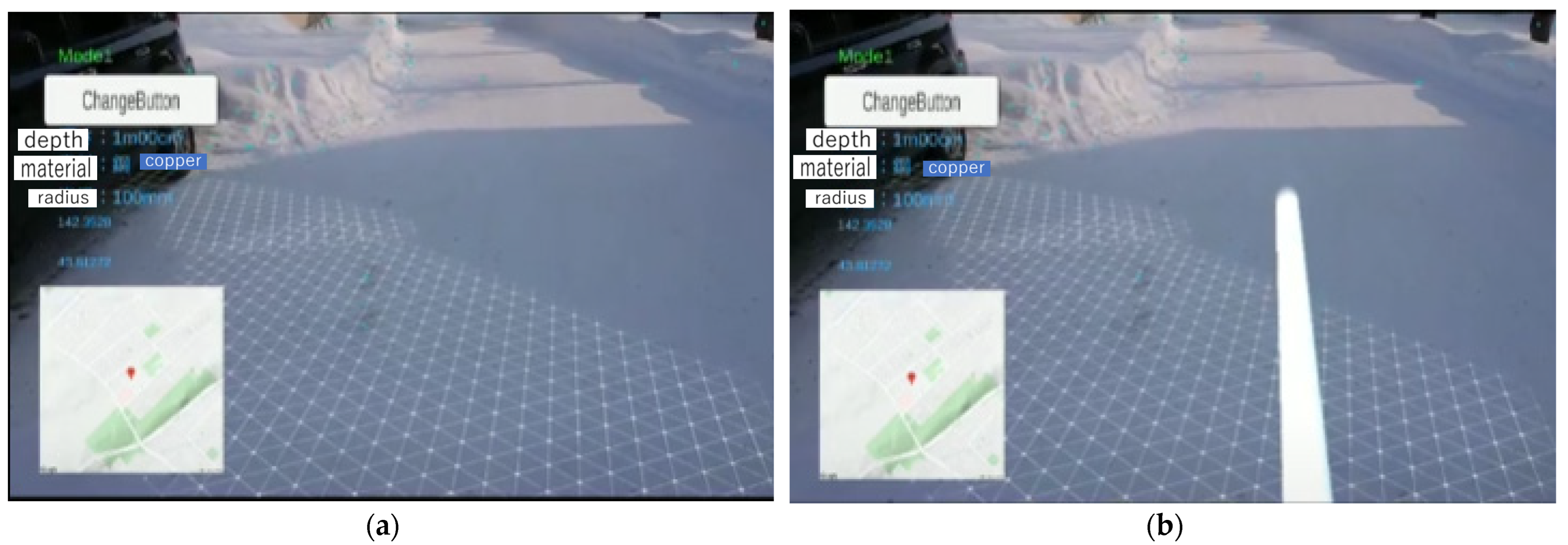
3.6. Improvement of Water Pipe AR Display
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Watanabe, M. Technologies for reconstruction and repair of water and sewage pipelines and facilities. Concr. Eng. 2016, 54, 111–116. [Google Scholar] [CrossRef] [PubMed]
- Kawamura, T.; Kawada, M.; Kawura, K. Improving efficiency of social infrastructure facility maintenance management using AR technology. Mitsubishi Electr. Tech. J. 2015, 89, 105–108. [Google Scholar]
- Chen, J.; Dong, S.; Hou, X.; Ma, X.; Yan, Y. Research and Application of Immersive Virtual Reality System Based on 3D Geographic Information System. In Proceedings of the 2022 IEEE Sustainable Power and Energy Conference (ISPEC), Chengdu, China, 23–25 November 2020; pp. 1730–1735. [Google Scholar]
- Muthalif, M.Z.A.; Shojaei, D.; Khoshelham, K. Resolving Perceptual Challenges of Visualizing Underground Utilities in Mixed Reality. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 101–108. [Google Scholar] [CrossRef]
- Lanham, M. Learn ARCore—Fundamentals of Google ARCore; Packt Publishing Ltd.: Birmingham, UK, 2018. [Google Scholar]
- El Barhoumi, N.; Hajji, R.; Bouali, X.; Brahim, Y.B.; Kharroubi, A. Assessment of 3D Models Placement Methods in Augmented Reality. Appl. Sci. 2022, 12, 10620. [Google Scholar] [CrossRef]
- Manni, A.; Oriti, D.; Sanna, A.; De Pace, F.; Manuri, F. Snap2cad: 3D indoor environment reconstruction for AR/VR applications using a smartphone device. Comput. Graph. 2021, 100, 116–124. [Google Scholar] [CrossRef]
- Broll, W.; Lindt, I.; Herbst, I.; Ohlenburg, J.; Braun, A.-K.; Wetzel, R. Toward Next-Gen Mobile AR Games. IEEE Comput. Graph. Appl. 2008, 28, 40–48. [Google Scholar] [CrossRef]
- Svennerberg, G. Beginning Google Maps API 3; Apress: New York, NY, USA, 2010. [Google Scholar]
- Suzaki, F.; Kashiyama, K.; Kotoura, T.; Ishida, H.; Yoshinaga, T. Construction of AR visualization system for underground buried structures using ARKit and investigation of superimposition with high accuracy. Proc. JSCE F3 Civ. Eng. Inform. 2021, 77, I_131–I_139. [Google Scholar]
- Gikas, V.; Perakis, H. Rigorous Performance Evaluation of Smartphone GNSS/IMU Sensors for ITS Applications. Sensors 2016, 16, 1240. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Xu, H.; Lin, S.; Deng, W.; Zhou, J.; Zhang, Y.; Shi, Y.; Peng, D.; Xue, Y. GPS 5.0: An Update on the Prediction of Kinase-specific Phosphorylation Sites in Proteins. Genom. Proteom. Bioinform. 2020, 18, 72–80. [Google Scholar] [CrossRef] [PubMed]
- Caron, F.; Duflos, E.; Pomorski, D.; Vanheeghe, P. GPS/IMU data fusion using multisensor Kalman filtering: Introduction of contextual aspects. Inf. Fusion 2006, 7, 221–230. [Google Scholar] [CrossRef]
- Friedemann Smith, C.; Drew, S.; Ziebland, S.; Nicholson, B.D. Understanding the role of GPs’ gut feelings in diagnosing cancer in primary care: Systematic review and meta-analysis of existing evidence. Br. J. Gen. Pract. 2000, 70, e612–e621. [Google Scholar] [CrossRef] [PubMed]
- Yang, C.; Zheng, J.; Ren, X.; Yang, W.; Shi, H.; Shi, L. Multi-sensor Kalman filtering with intermittent measurements. IEEE Trans. Autom. Control. 2017, 63, 797–804. [Google Scholar] [CrossRef]






















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Inoue, K.; Ogake, S.; Kobayashi, K.; Tomura, T.; Mitsui, S.; Satake, T.; Igo, N. An AR Application for the Efficient Construction of Water Pipes Buried Underground. Electronics 2023, 12, 2634. https://doi.org/10.3390/electronics12122634
Inoue K, Ogake S, Kobayashi K, Tomura T, Mitsui S, Satake T, Igo N. An AR Application for the Efficient Construction of Water Pipes Buried Underground. Electronics. 2023; 12(12):2634. https://doi.org/10.3390/electronics12122634
Chicago/Turabian StyleInoue, Koki, Shuichiro Ogake, Kazuma Kobayashi, Toyoaki Tomura, Satoshi Mitsui, Toshifumi Satake, and Naoki Igo. 2023. "An AR Application for the Efficient Construction of Water Pipes Buried Underground" Electronics 12, no. 12: 2634. https://doi.org/10.3390/electronics12122634
APA StyleInoue, K., Ogake, S., Kobayashi, K., Tomura, T., Mitsui, S., Satake, T., & Igo, N. (2023). An AR Application for the Efficient Construction of Water Pipes Buried Underground. Electronics, 12(12), 2634. https://doi.org/10.3390/electronics12122634