
The Research of Air Combat Intention Identification Method Based on BiLSTM + Attention

Abstract
:1. Introduction
2. Mapping Relationship between Characteristic State Parameters and Combat Intention
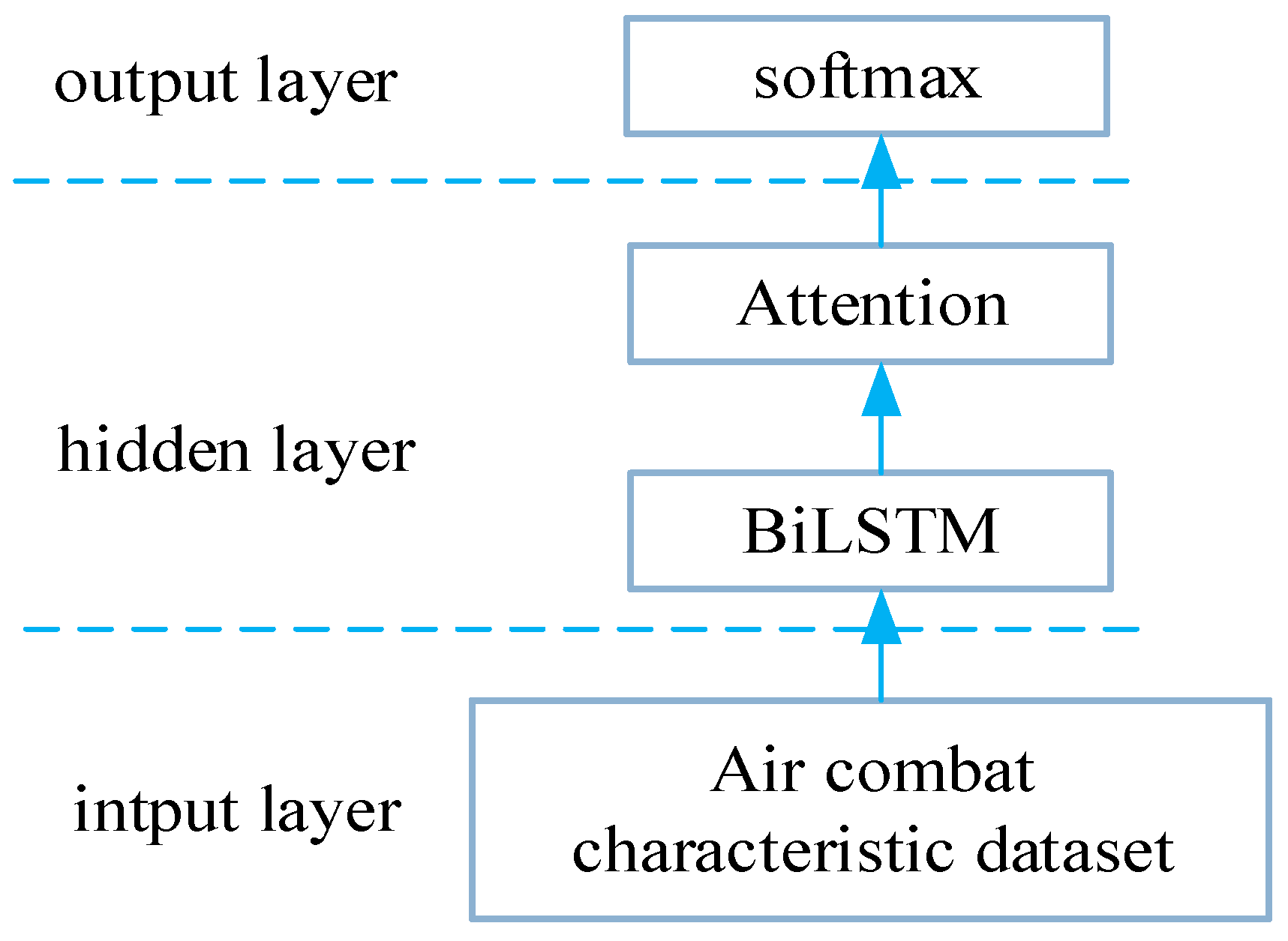
3. Air Combat Intention Identification Method Based on BiLSTM + Attention
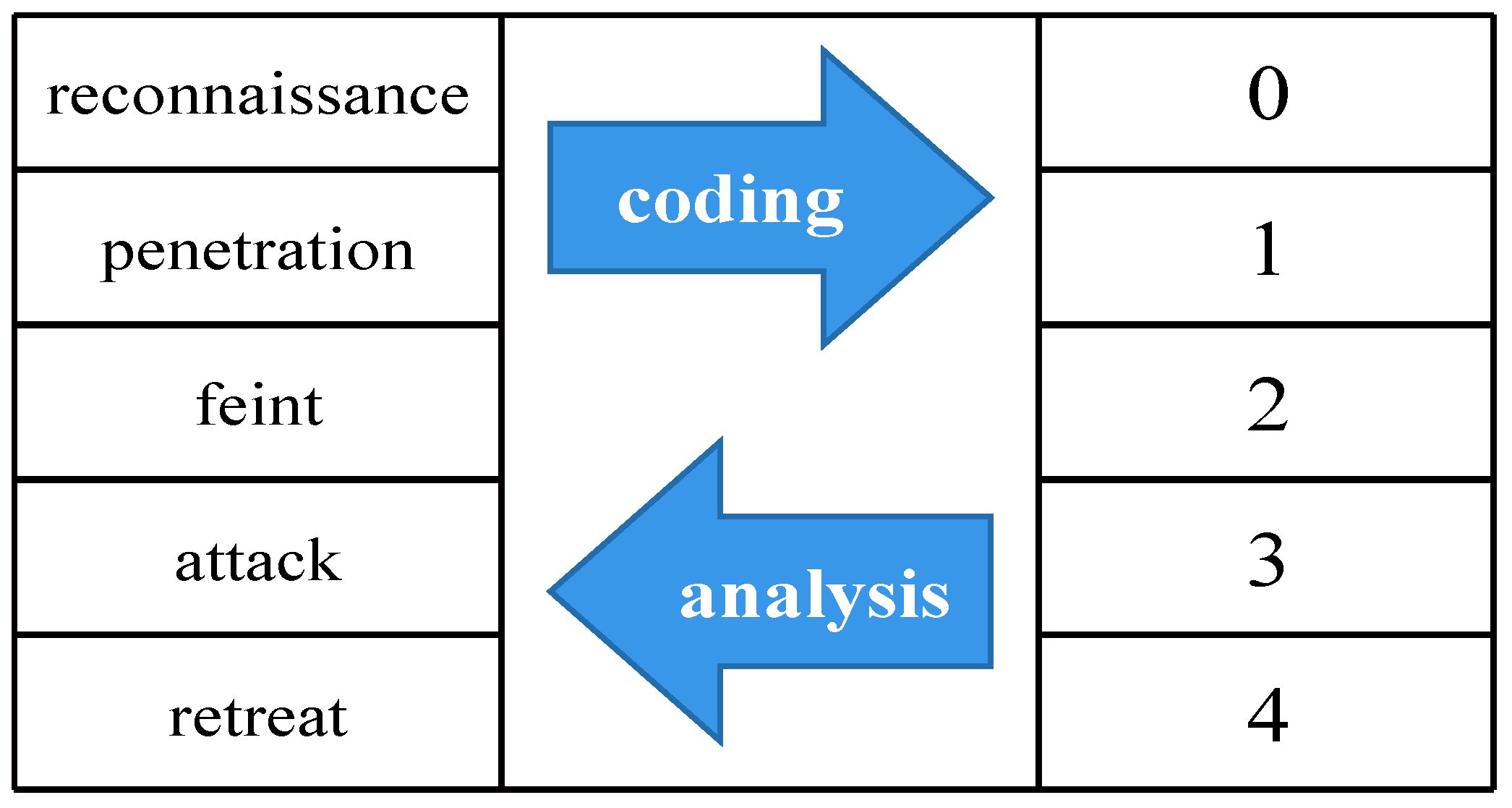
3.1. Input Layer
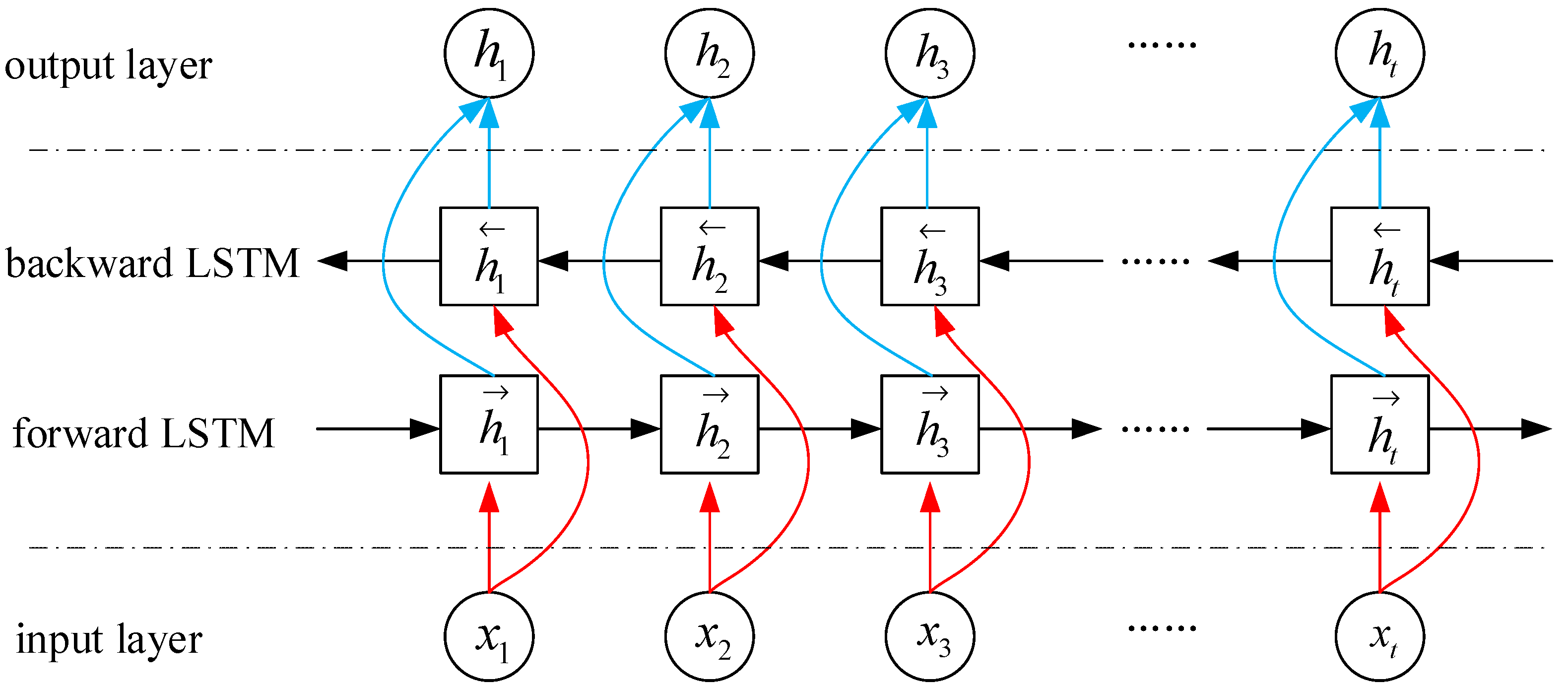
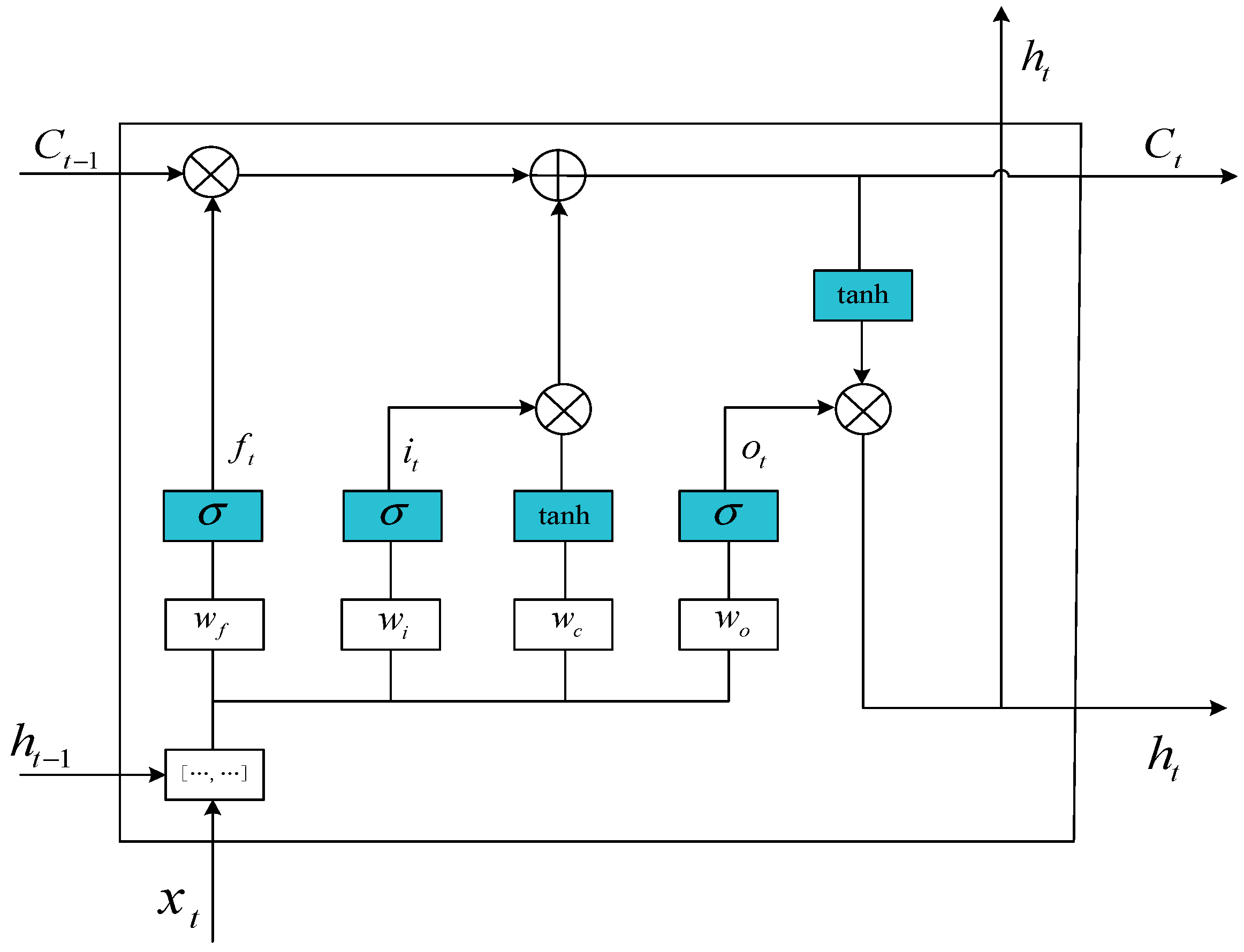
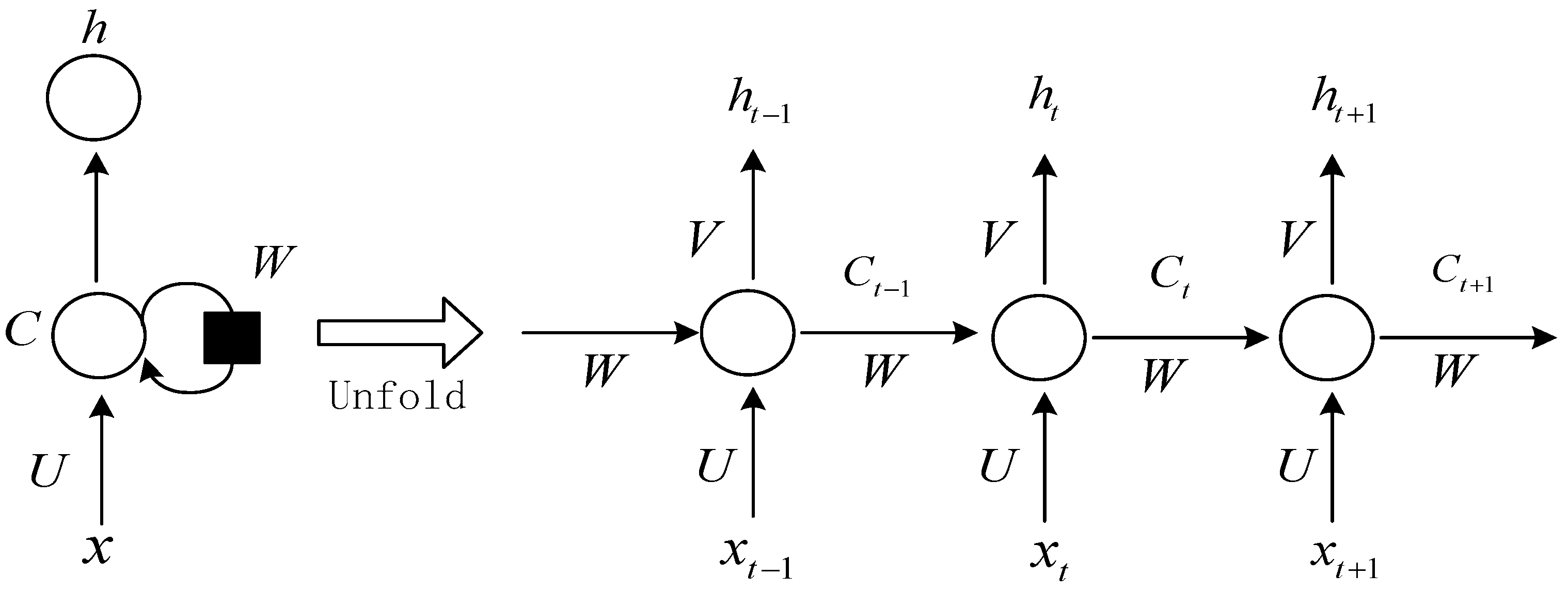
3.2. Hidden Layers
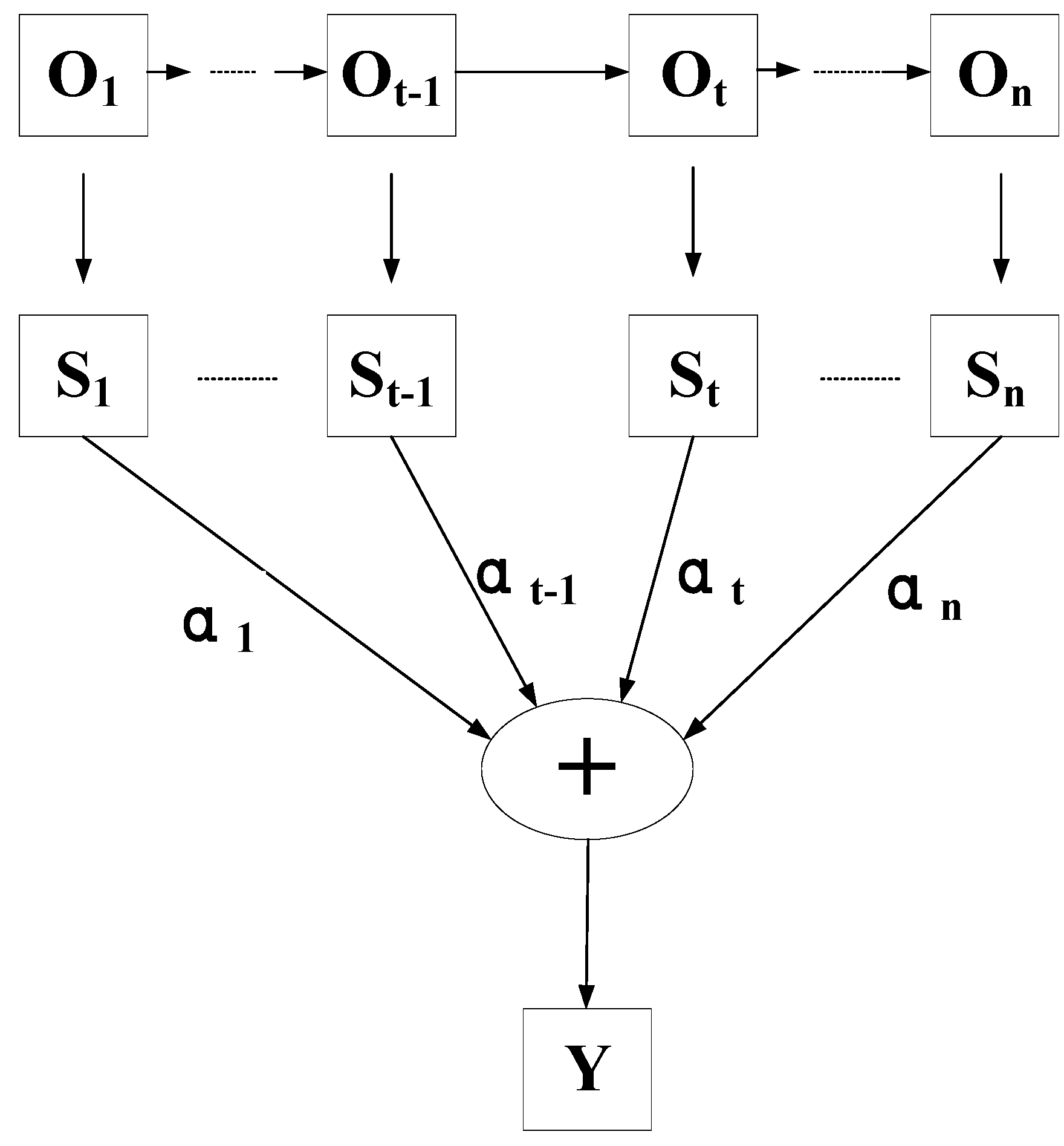
3.3. Attention Mechanism
3.4. Output Layer
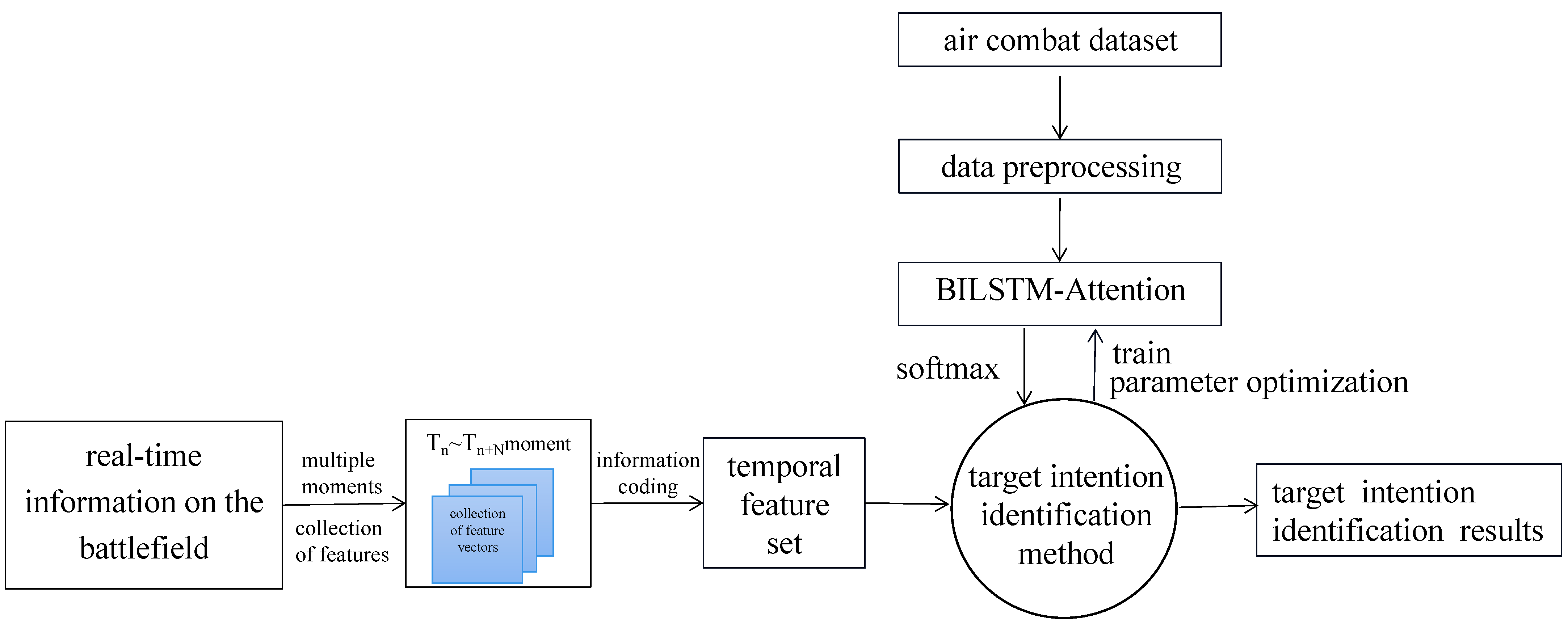
4. Air Combat Target Intention Identification Process
5. Experiment and Results
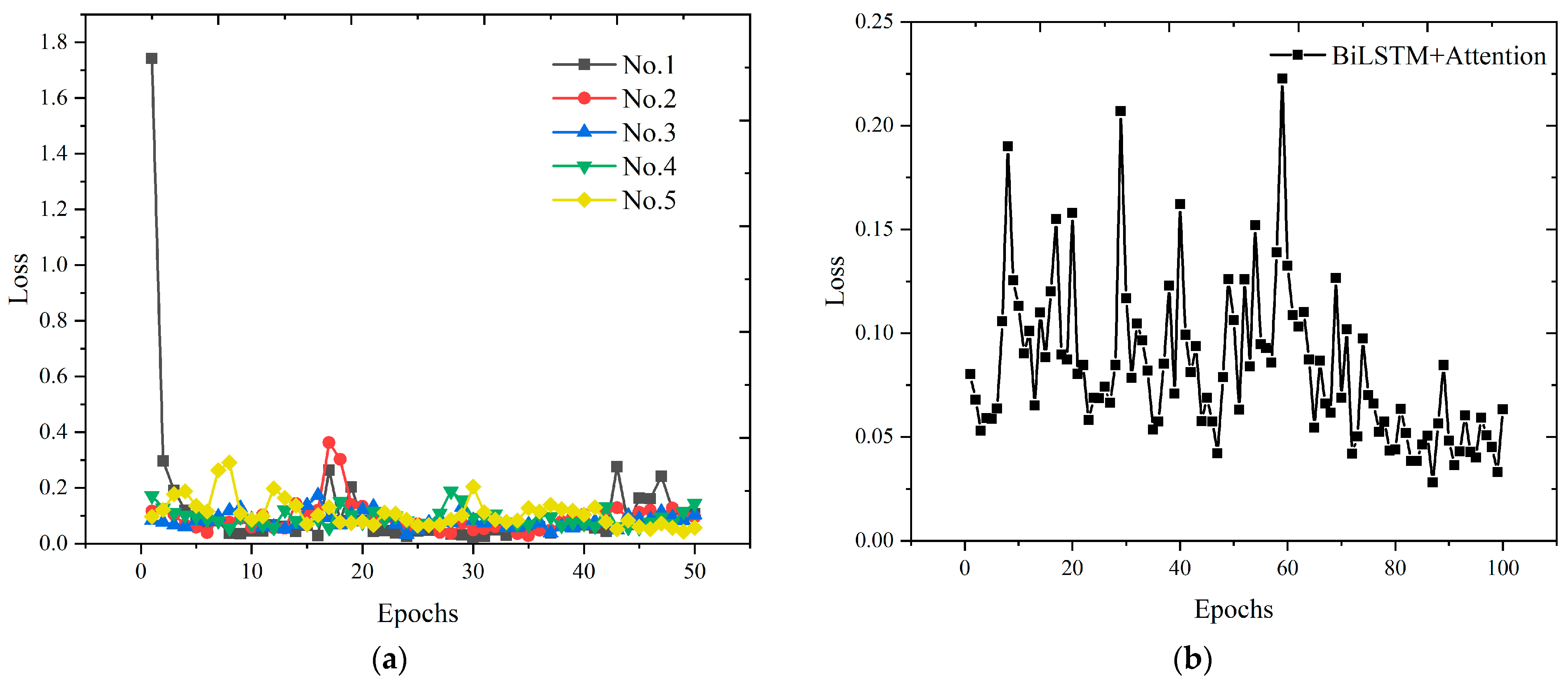
5.1. Parameter Optimization
5.1.1. The Effect of Sliding Windows on Identification
5.1.2. The Effect of Batch Size on Identification
5.1.3. The Effect of the Number of Hidden Nodes of Neural Networks on Identification
5.1.4. The Effect of Dropout on Identification
5.1.5. The Effect of Learning Rate on Identification
5.2. Result Analysis of Identification Method Based on BiLSTM + Attention
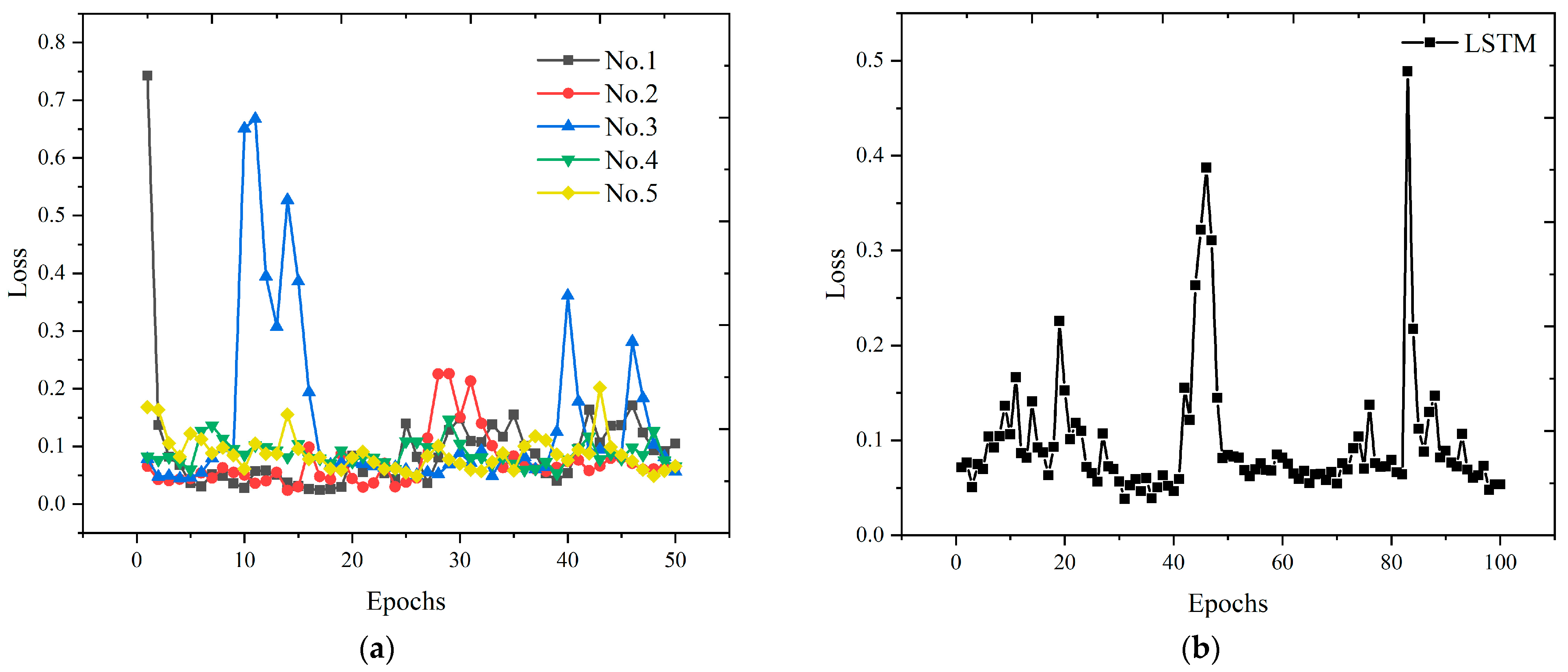
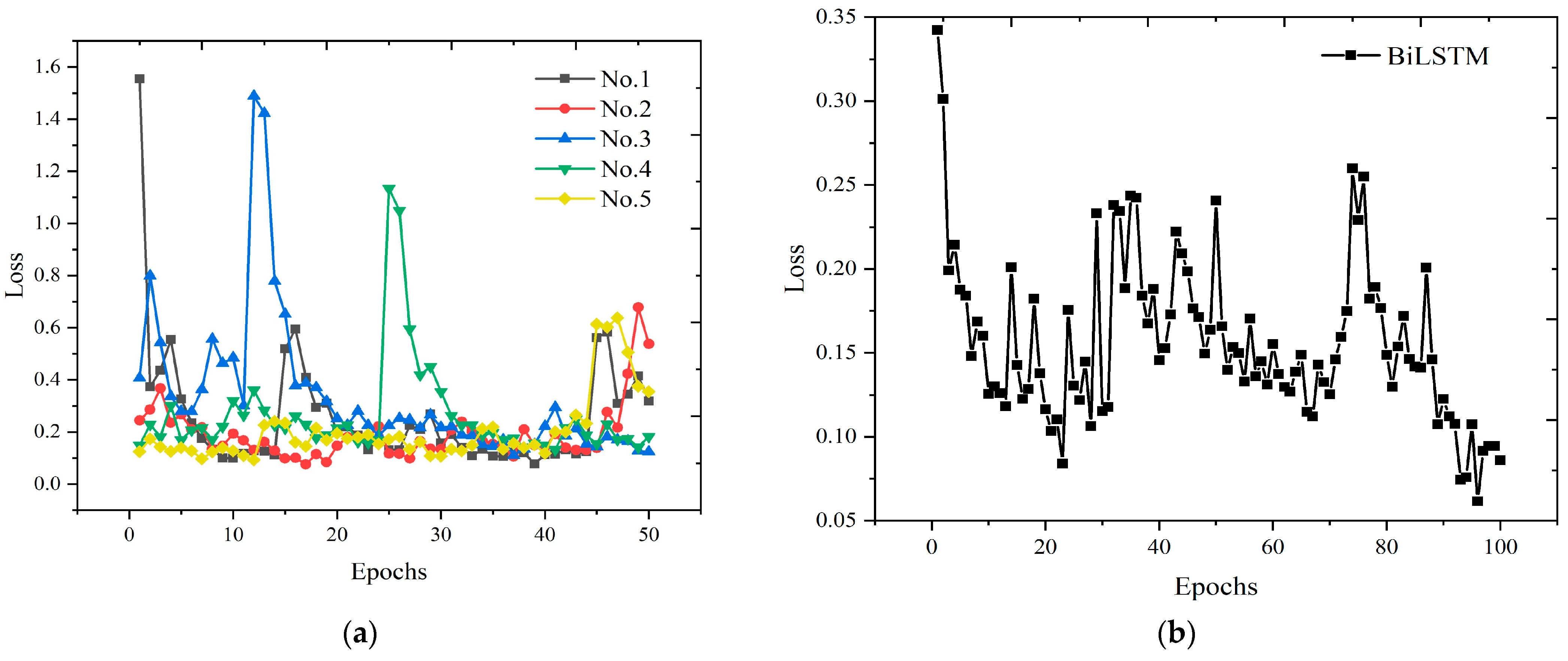
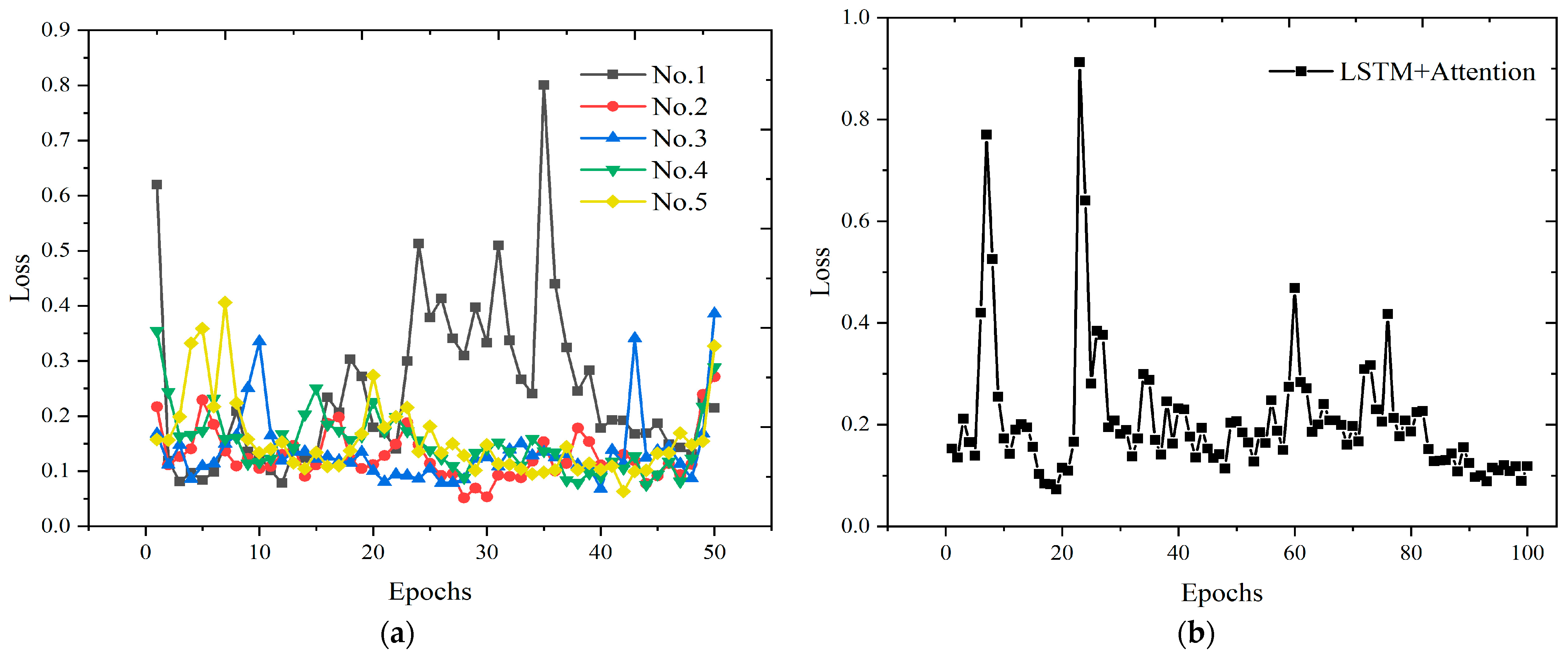
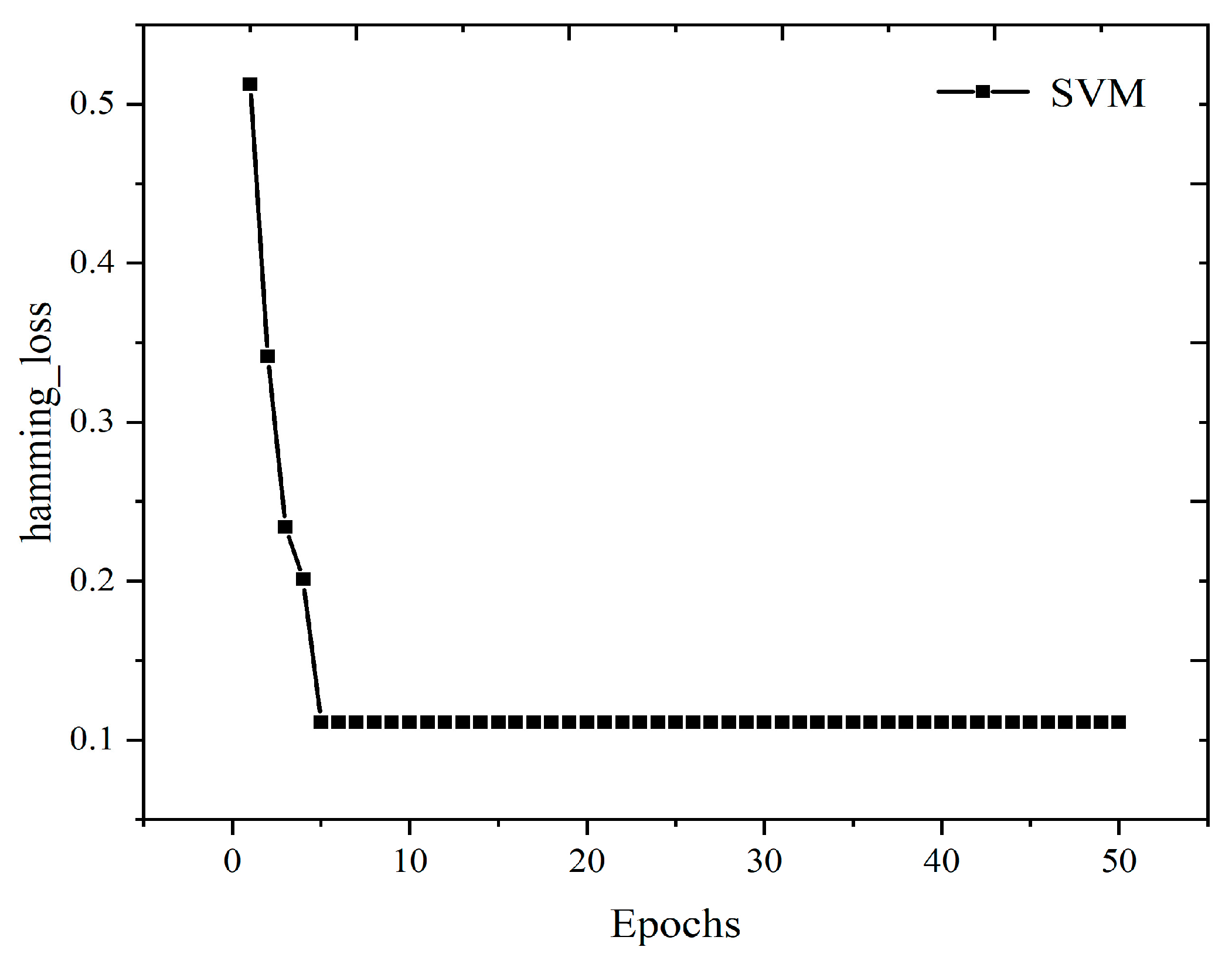
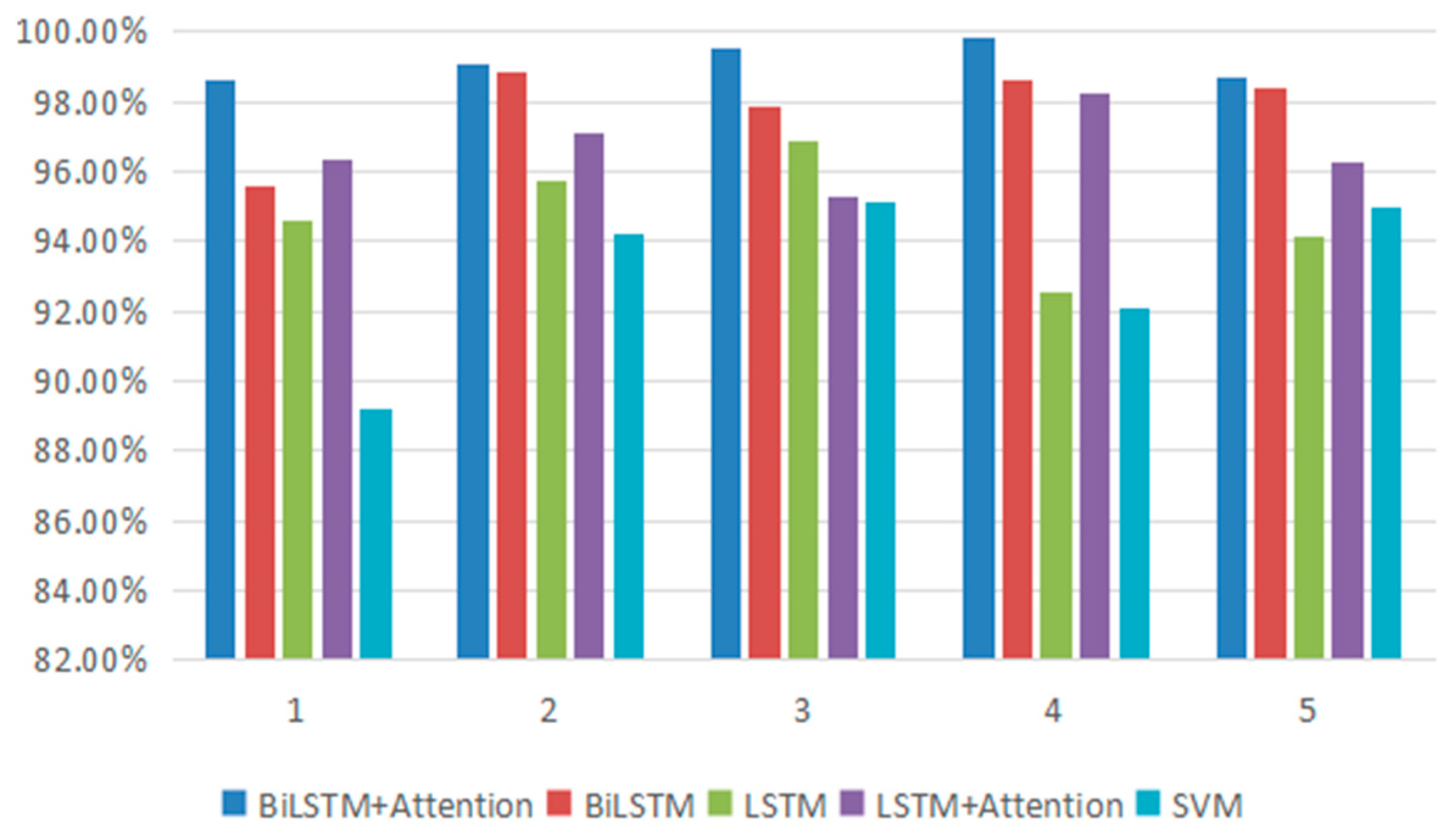
5.3. Comparative Experiment of Five Intention Identification Methods
5.4. Ablation Experiments by Intention Identification Methods
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jin, Q.; Gou, X.T.; Jin, W.D.; Wu, N.F. Intention identification of aerial targets based on Bayesian optimization algorithm. In Proceedings of the 2017 2nd IEEE International Conference on Intelligent Transportation Engineering, Singapore, 1–3 September 2017. [Google Scholar]
- Li, Z.W.; Li, S.Q.; Peng, M.Y.; Jiang, T.; Ju, M.; Sun, A.M. An improved Attention Mechanism based target Intention identification Method for air combat in LSTM. Electron. Opt. Control 2022, 41, 1–9. (In Chinese) [Google Scholar]
- Ou, W.; Liu, S.J.; He, X.; Guo, S. Target Tactical Intention Identification Algorithm based on time sequence Feature Coding. Command. Control Simul. 2016, 38, 36–41. (In Chinese) [Google Scholar]
- Jia, S.Y.; Xu, J.Y.; Wang, Y. Air Target Intention Classification Based on Adaptive Neural Network Fuzzy System. Electron. Meas. Technol. 2016, 39, 62–66. (In Chinese) [Google Scholar]
- Teng, F.; Liu, S.; Song, Y.F. BiLSTM-Attention: A Tactical Intention Identification Model for aerial Targets. Aeronaut. Weapons War 2021, 28, 24–32. (In Chinese) [Google Scholar]
- Wang, H.R.; Lao, S.Y.; Bai, L.; Liu, G. Tactical Air Target Intention Identification Based on MEBN. Fire Control Command. Control. 2012, 37, 133–138. (In Chinese) [Google Scholar]
- Niu, X.B.; Zhao, H.; Zhang, Y.S. Intention identification of Naval Ships Based on Decision Tree. Ordnance Ind. Autom. 2010, 29, 44–46. (In Chinese) [Google Scholar]
- Chen, H.; Ren, Q.L.; Hua, Y. Tactical intention identification of sea surface targets based on Fuzzy Neural networks. Syst. Eng. Electron. 2016, 38, 1847–1853. (In Chinese) [Google Scholar]
- Zhou, W.W.; Yao, P.Y.; Zhang, J.Y. Deep neural network-based operational intention identification of air targets. J. Aviat. 2018, 39, 200–208. (In Chinese) [Google Scholar]
- Xu, H.K.; Jiang, T.T.; Li, X.; Zhou, J.J.; Zhang, Z.F.; Lu, J.K. BiLSTM Scam Call Identification Based on Attention Mechanism. J. Comput. Syst. Appl. 2022, 31, 326–332. (In Chinese) [Google Scholar]
- Zheng, S.L.; Cheng, C.L.; Mao, Y. Intention identification Model Combining Entity Information and Temporal Features. Comput. Technol. Dev. 2022, 32, 171–176. (In Chinese) [Google Scholar]
- Jia, M.S.; Qi, Z.Y.; Xue, D.Q. Research on bearing fault prediction based on GASA-BP-BiLSTM. Comb. Mach. Tools Autom. Mach. Technol. 2023, 591, 148–151. (In Chinese) [Google Scholar]
- Liu, Y.H.; Shi, Y.Q.; Wang, J.J. Multi-stage life prediction of rolling bearings based on FCM-LSTM. Mach. Des. 2023, 40, 43–50. (In Chinese) [Google Scholar]
- Ma, L.; Zhang, T.L. Deep learning-based battery state of charge estimation: Enhancing estimation performance with unlabelled training samples. J. Energy Chem. 2023, 80, 48–57. [Google Scholar] [CrossRef]
- Liao, L.B.; Zhang, B.S.; Sun, H.W. Collaborative Welding Method for Multiple Robotic Arm Welding Joints on Ships Based on QMIX Reinforcement Learning Algorithm. CN112427843A, 2 March 2021. (In Chinese). [Google Scholar]
- Meng, C.; Wang, J.Z.; Peng, X. GAN-BiLSTM-based RUL prediction for lithium batteries. J. Heilongjiang Inst. Technol. 2023, 23, 51–56. (In Chinese) [Google Scholar]
- Yang, B.; Liang, J.; Zhou, J.W. Research on an explainable click-through rate prediction model based on attention mechanism. Comput. Sci. 2023, 50, 12–20. (In Chinese) [Google Scholar]
- Yang, G.L.; Yu, H.S.; Xia, J.L. An air quality prediction method incorporating self-attentive and spatial-temporal convolutional networks. J. Saf. Environ. 2022, 22, 1009–6094. (In Chinese) [Google Scholar]
- Liang, B.; Liu, Q.; Xu, J. Aspect-Based Sentiment Analysis Based on Multi-Attention CNN. J. Comput. Res. Dev. 2017, 54, 1724–1735. [Google Scholar]
- Wang, W.G.; Shen, J.B.; Jia, Y.D. Review of Visual Attention Detection. J. Softw. 2019, 30, 416–439. [Google Scholar]
- Liu, Z.C.; Dong, X.; Xue, J. Adaptive Neural Control for a Class of Pure-Feedback Nonlinear Systems via Dynamic Surface Technique. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 1969–1975. [Google Scholar] [CrossRef]
- Yang, C.J.; Shao, Y.B.; Sun, J. Syntactic boundary analysis combining BiLSTM + CRF and TextRank. Small Microcomput. Syst. 2022, 43, 1394–1400. (In Chinese) [Google Scholar]
- Zhang, M.X. An Algorithm for Facial Expression Identification Based on Attention Mechanism. Master’s Thesis, Lanzhou University, Lanzhou, China, 1 March 2022. (In Chinese). [Google Scholar]
- Liu, Z.C.; Huang, J.; Wen, C. Distributed control of nonlinear systems with unknown time-varying control coefficients: A novel Nussbaum function approach. IEEE Trans. Autom. Control 2022, 68, 1–13. [Google Scholar] [CrossRef]
- Liu, Z.C.; Huang, H.; Park, J.H. Adaptive Fuzzy Control for Unknown Nonlinear Multi-Agent Systems with Switching Directed Communication Typologies. IEEE Trans. Fuzzy Syst. 2023, accepted. [Google Scholar] [CrossRef]
- Tan, H.Q.; Niu, Q. A time series symbolization method based on sliding windows and local features. Comput. Appl. Res. 2013, 30, 796–798. (In Chinese) [Google Scholar]
- Wang, J.G.; Ding, H.Q.; Hu, B.Q. A ship trajectory prediction model based on sliding window PSO-LSSVR. J. Wuhan Univ. Technol. 2022, 44, 35–43. (In Chinese) [Google Scholar]
- Pan, J.Y.; Wang, M.M.; Kan, W.; Gao, Y.F. Method for estimating the state of charge of lithium-ion batteries based on Adam optimization algorithm and short-term memory neural network. Electr. Technol. 2022, 23, 25–30. (In Chinese) [Google Scholar]
- Liu, D.D.; Chen, M.; Wu, Q.X. UAV air combat target intention prediction under non-complete information. China Sci. Inf. Sci. 2020, 50, 704–717. (In Chinese) [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target Distance/km | Most Likely Combat Intention | Sub-Likely Combat Intention |
|---|---|---|
| <100 | penetration | attack |
| 100–300 | attack | feint |
| 300–500 | reconnaissance | attack |
| >500 | retreat | reconnaissance |
| Target Maneuvering Type | Most Likely Combat Intention | Sub-Likely Combat Intention |
|---|---|---|
| Fig-8 | reconnaissance | feint |
| Fig-0 | reconnaissance | feint |
| climb | attack | retreat |
| swoop | attack | penetration |
| snake-type maneuver | reconnaissance | feint |
| rear tracking turns | attack | feint |
| horizontal scissor maneuver | attack | feint |
| Target Altitude/m | Most Likely Combat Intention | Sub-Likely Combat Intention |
|---|---|---|
| 50–200 | penetration | attack |
| 200–1000 | reconnaissance | attack |
| 1000–8000 | attack | reconnaissance |
| 8000–10,000 | attack | feint |
| >10,000 | reconnaissance | penetration |
| Target Velocity/km/h | Most Likely Combat Intention | Sub-Likely Combat Intention |
|---|---|---|
| 600–850 | reconnaissance | penetration |
| 850–950 | penetration | reconnaissance |
| 950–1250 | feint | reconnaissance |
| 1250–1470 | attack | retreat |
| Most Likely Combat Intention | Sub-Likely Combat Intention | |
|---|---|---|
| 0–20 | penetration | attack |
| 20–60 | attack | penetration |
| 60–90 | reconnaissance | attack |
| 90–180 | retreat | reconnaissance |
| Intention Type | Total Samples | Training Samples | Test Samples |
|---|---|---|---|
| penetration | 1032 | 798 | 234 |
| attack | 996 | 797 | 199 |
| feint | 1056 | 844 | 212 |
| reconnaissance | 886 | 709 | 177 |
| retreat | 1030 | 824 | 206 |
| Sliding Window Lengths | Accuracy | Loss |
|---|---|---|
| 8 | 93.88% | 0.188 |
| 12 | 99.12% | 0.136 |
| 16 | 94.73% | 0.185 |
| 20 | 93.12% | 0.198 |
| 30 | 90.33% | 0.223 |
| 40 | 88.12% | 0.236 |
| Batch Size | Accuracy | Loss |
|---|---|---|
| 32 | 86.66% | 0.246 |
| 64 | 89.14% | 0.138 |
| 128 | 99.23% | 0.119 |
| 256 | 97.14% | 0.166 |
| Hidden Nodes | Accuracy | Loss |
|---|---|---|
| 30 | 93.12% | 0.256 |
| 50 | 95.53% | 0.167 |
| 70 | 98.53% | 0.126 |
| 90 | 94.66% | 0.192 |
| 100 | 93.88% | 0.144 |
| Dropout | Accuracy | Loss |
|---|---|---|
| 0.0 | 94.12% | 0.132 |
| 0.05 | 96.53% | 0.182 |
| 0.1 | 97.93% | 0.131 |
| 0.2 | 96.16% | 0.262 |
| 0.3 | 92.34% | 0.168 |
| Learning Rate | Accuracy | Loss |
|---|---|---|
| 0.001 | 95.12% | 0.152 |
| 0.01 | 96.31% | 0.182 |
| 0.1 | 99.61% | 0.131 |
| 0.2 | 95.33% | 0.239 |
| Parameter Name | Numerical Value |
|---|---|
| sliding window lengths | 12 |
| batch size | 128 |
| learning rate | 0.1 |
| dropout rate | 0.1 |
| activation function | ReLU |
| hidden nodes | 70 |
| Intention Type | Feint | Reconnaissance | Attack | Penetration | Retreat |
|---|---|---|---|---|---|
| feint | 98.90% | 0.99% | 0.11% | ||
| reconnaissance | 0.22% | 99.30% | 0.48% | ||
| attack | 0.13% | 0.15% | 98.60% | 0.95% | 0.17% |
| penetration | 0.17% | 0.48% | 99.35% | ||
| retreat | 0.45% | 99.55% |
| Identification Methods | Five-Fold Cross-Verification Accuracy | Average Accuracy | Average Time/ms | ||||
|---|---|---|---|---|---|---|---|
| BiLSTM + Attention | 98.60% | 99.10% | 99.50% | 99.80% | 98.70% | 99.14% | 51.82 |
| BiLSTM | 95.55% | 98.87% | 97.85% | 98.62% | 98.37% | 97.87% | 51.30 |
| LSTM | 94.61% | 95.75% | 96.86% | 92.52% | 94.12% | 94.77% | 49.53 |
| LSTM + Attention | 96.36% | 97.12% | 95.26% | 98.26% | 96.29% | 96.66% | 50.33 |
| SVM | 89.23% | 94.19% | 95.11% | 92.12% | 94.95% | 93.12% | 59.16 |
| Comparison of the Model Components | Accuracy % | Loss Value | ||
|---|---|---|---|---|
| Bidirectional | LSTM | Attention | ||
| √ | √ | √ | 99.14 | 0.059 |
| √ | √ | 98.37 | 0.103 | |
| √ | √ | 96.29 | 0.112 | |
| √ | 94.77 | 0.169 | ||
| Evaluation Metrics | Precision Rate | Recall Rate | F1 Score | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ① | ② | ③ | ④ | ① | ② | ③ | ④ | ① | ② | ③ | ④ | ||
| air combat intention | feint | 99.1 | 98.1 | 96.6 | 94.3 | 99.3 | 98.5 | 96.4 | 94.5 | 99.2 | 98.3 | 96.5 | 94.4 |
| reconnaissance | 99.5 | 97.3 | 97.2 | 94.8 | 99.1 | 96.5 | 96.4 | 93.6 | 99.3 | 96.9 | 96.8 | 94.2 | |
| attack | 98.6 | 97.1 | 95.8 | 88.9 | 98.6 | 98.3 | 95.8 | 89.3 | 98.6 | 97.7 | 95.8 | 89.1 | |
| penetration | 97.9 | 96.2 | 96.3 | 94.6 | 97.3 | 98.4 | 96.5 | 94.8 | 97.6 | 97.3 | 96.4 | 94.7 | |
| retreat | 99.8 | 97.9 | 95.8 | 93.4 | 99.2 | 98.5 | 96.8 | 92.8 | 99.5 | 98.2 | 96.3 | 93.1 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, B.; Li, Q.; Zhang, T.; Zhao, H. The Research of Air Combat Intention Identification Method Based on BiLSTM + Attention. Electronics 2023, 12, 2633. https://doi.org/10.3390/electronics12122633
Tan B, Li Q, Zhang T, Zhao H. The Research of Air Combat Intention Identification Method Based on BiLSTM + Attention. Electronics. 2023; 12(12):2633. https://doi.org/10.3390/electronics12122633
Chicago/Turabian StyleTan, Bin, Qiuni Li, Tingliang Zhang, and Hui Zhao. 2023. "The Research of Air Combat Intention Identification Method Based on BiLSTM + Attention" Electronics 12, no. 12: 2633. https://doi.org/10.3390/electronics12122633
APA StyleTan, B., Li, Q., Zhang, T., & Zhao, H. (2023). The Research of Air Combat Intention Identification Method Based on BiLSTM + Attention. Electronics, 12(12), 2633. https://doi.org/10.3390/electronics12122633