
Analysis of Inverter Circulating Current and Magnetic Potential for Flux-Weakening Drive of BLDCM


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
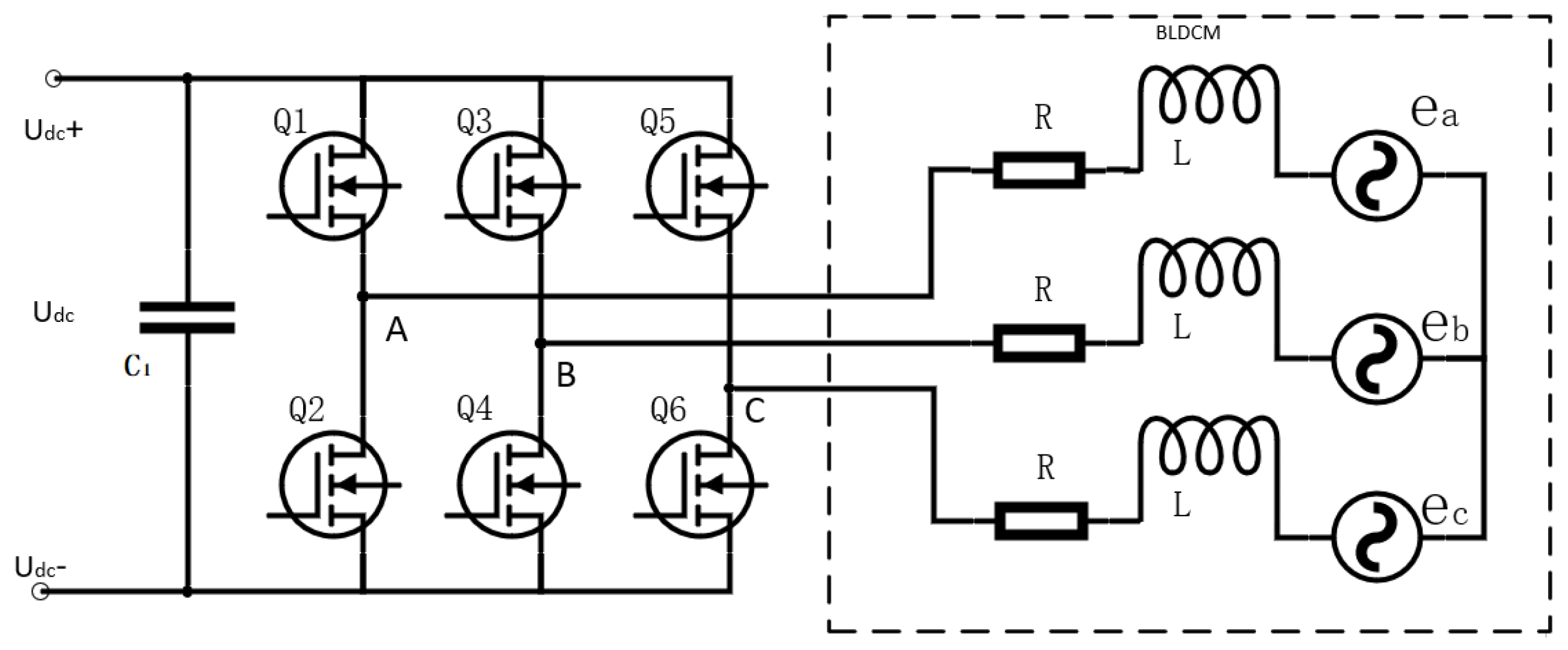
2. Inverter Circulating Current under Field Weakening of Permanent Magnet BLDCM
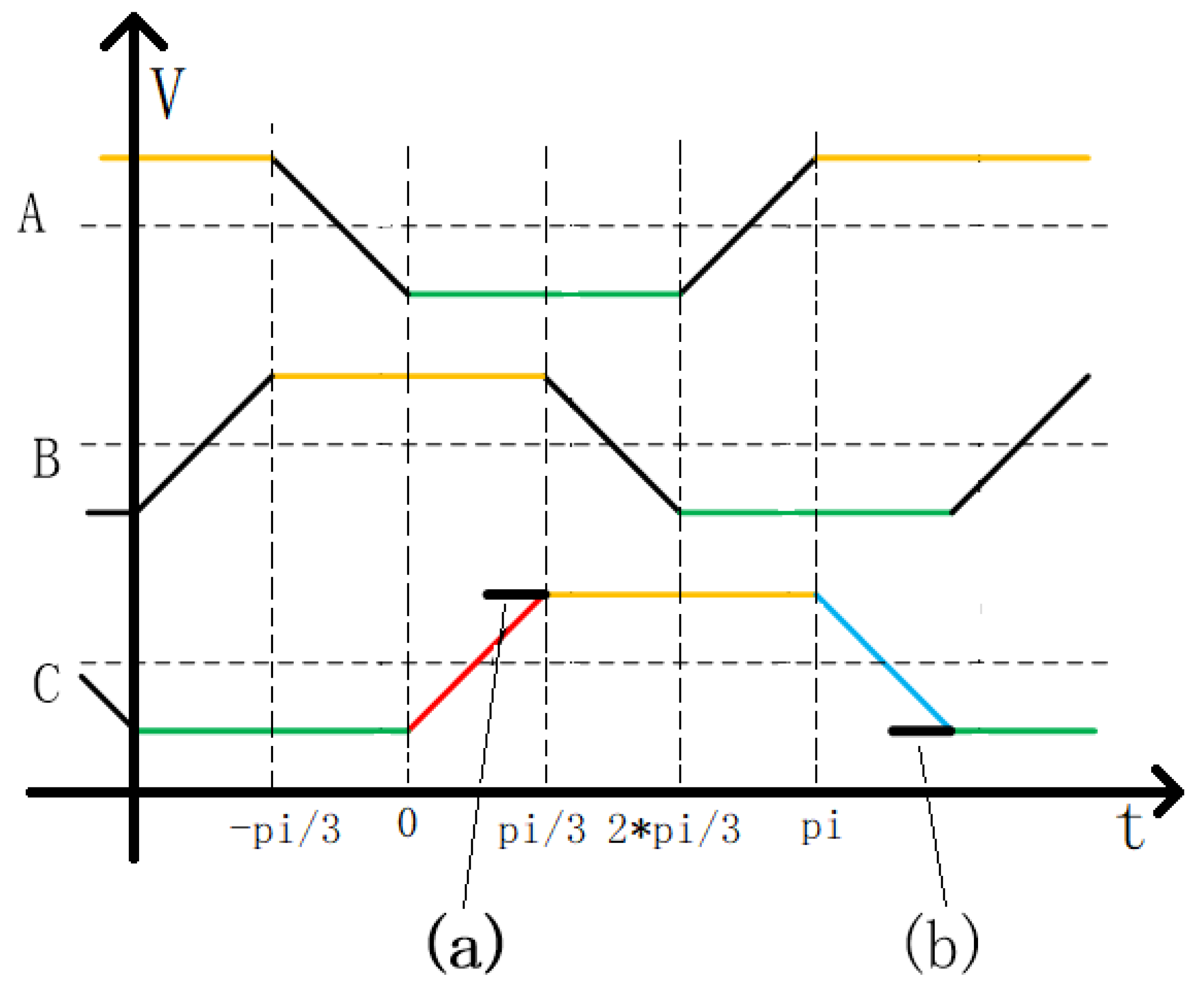
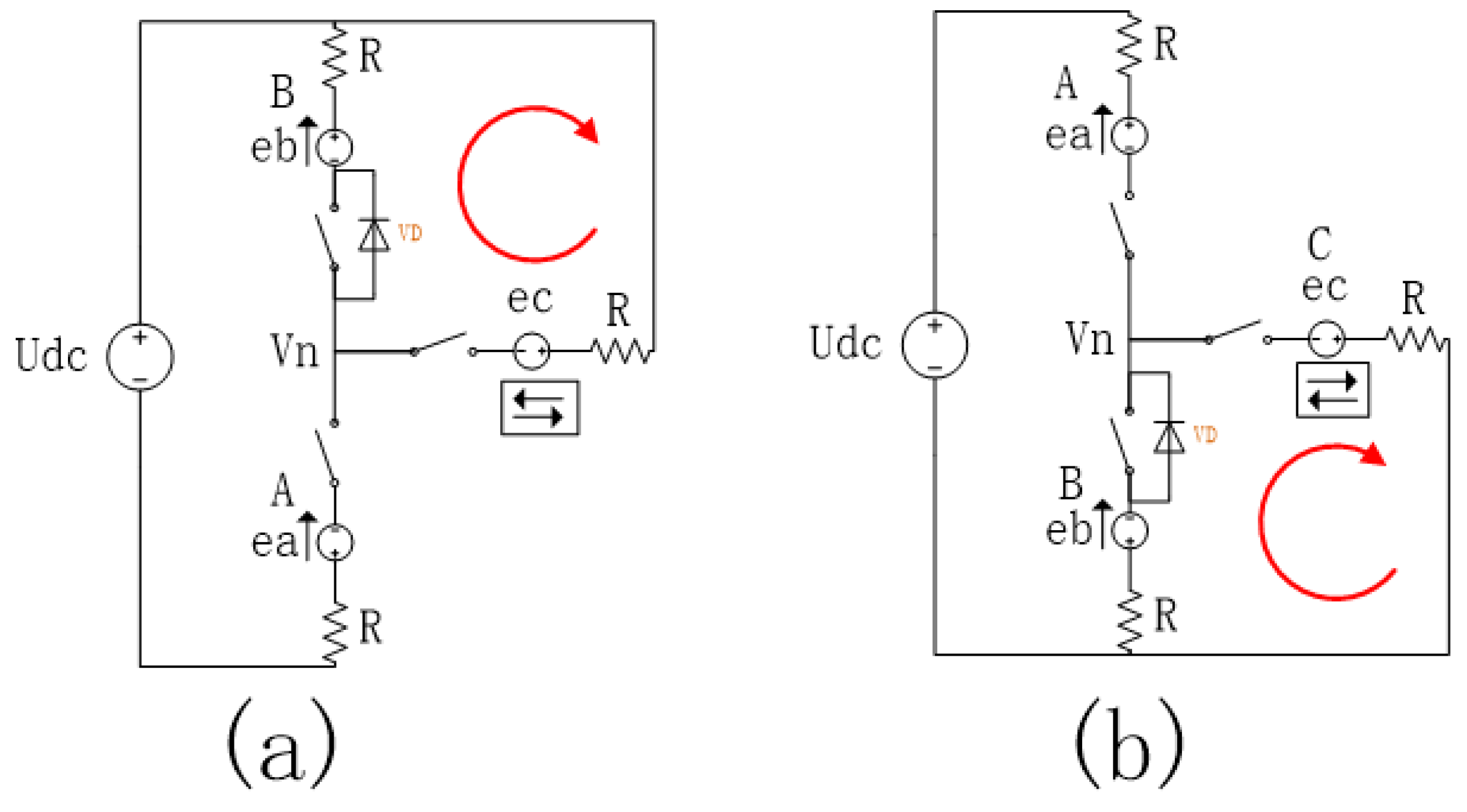
The Generation Mechanism of Field Weakening Inverter Circulation
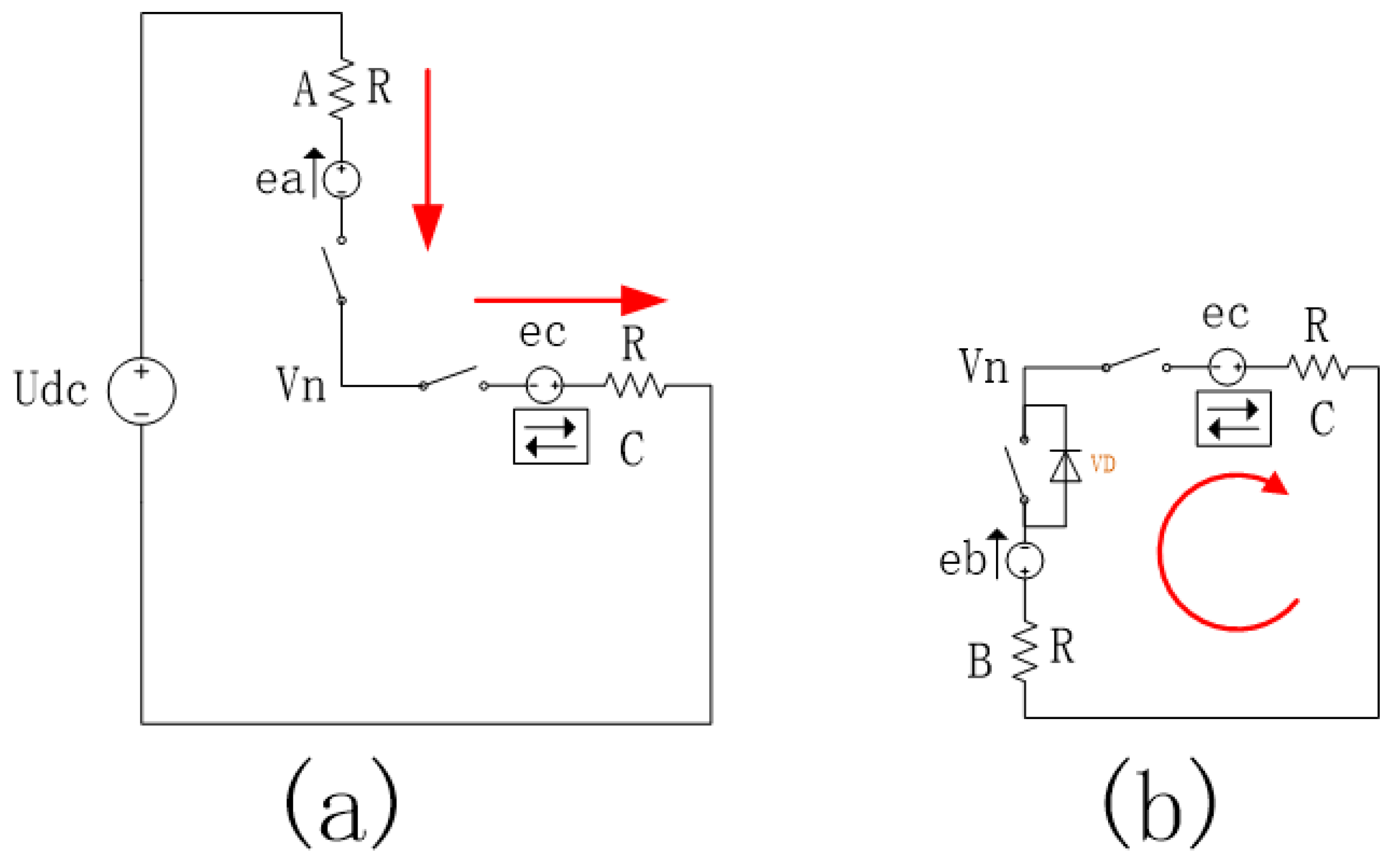
3. Further Analysis of Inverter Circulation
4. The Combined Magnetic Potential Analysis of the Inverted Circulating Current and the Early Conduction
4.1. Derive the Resultant Magnetic Potential Generated by the Current from the Three-Phase Current
4.2. The Influence of the Circulation on the Resultant Magnetic Potential
4.3. The Field Weakening Effect and Braking Effect of the Inverter Circulation
5. Matlab Simulation Model and Result Verification
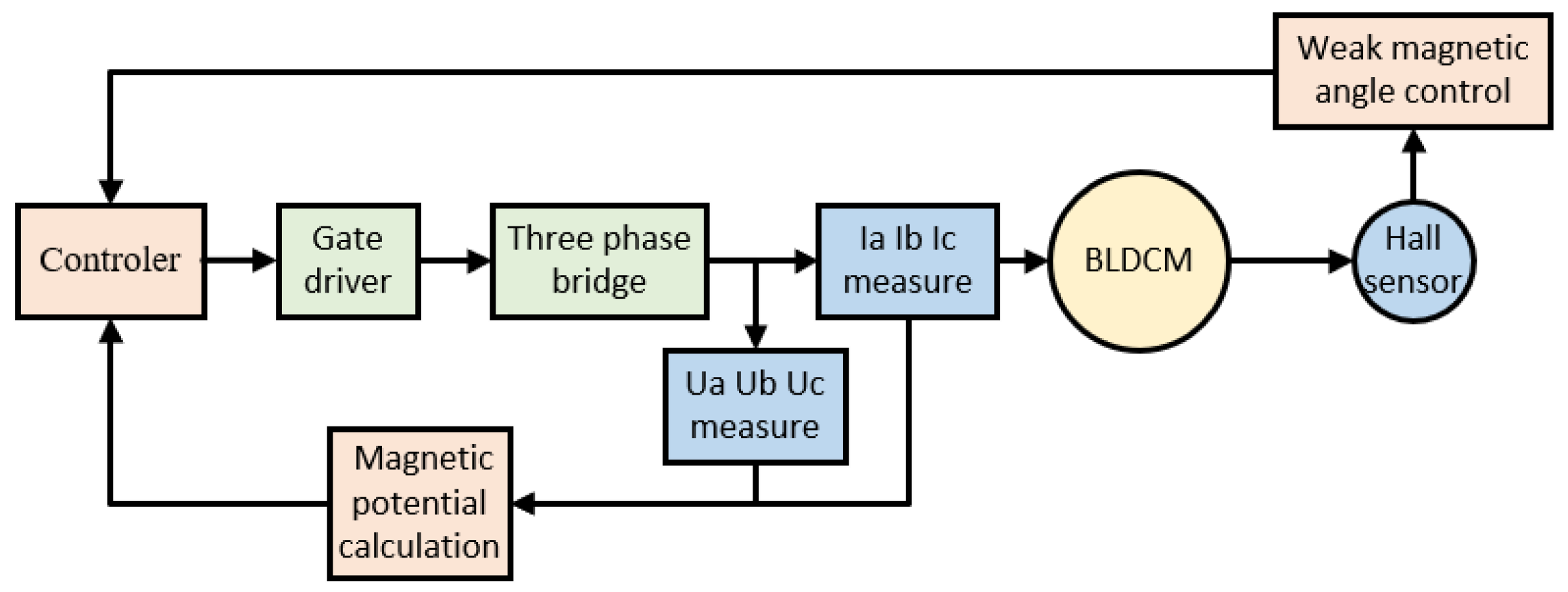
5.1. Simulation Model
5.2. The Sample Model Is Modified to Field Weakening Control and Operating Results
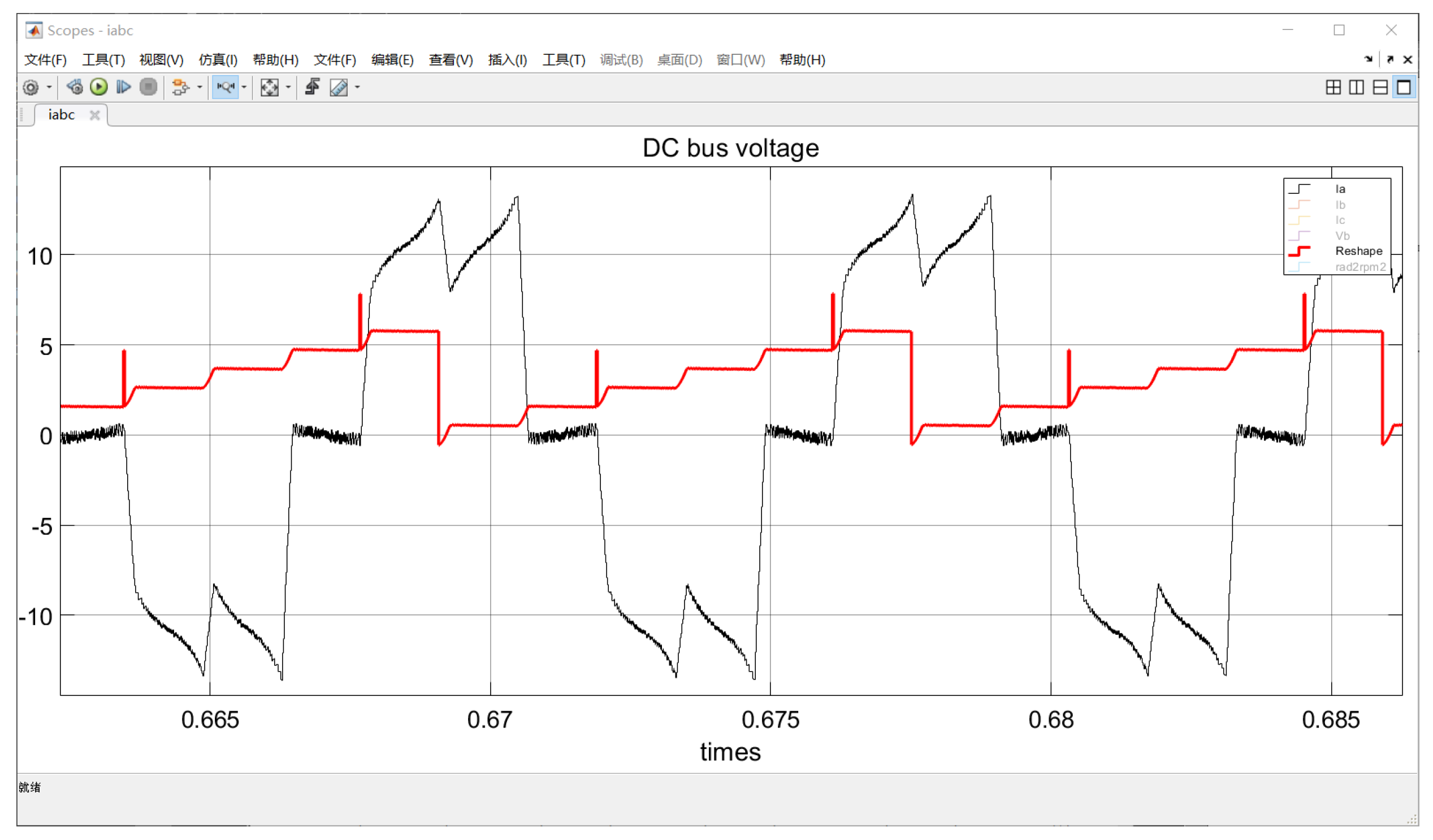
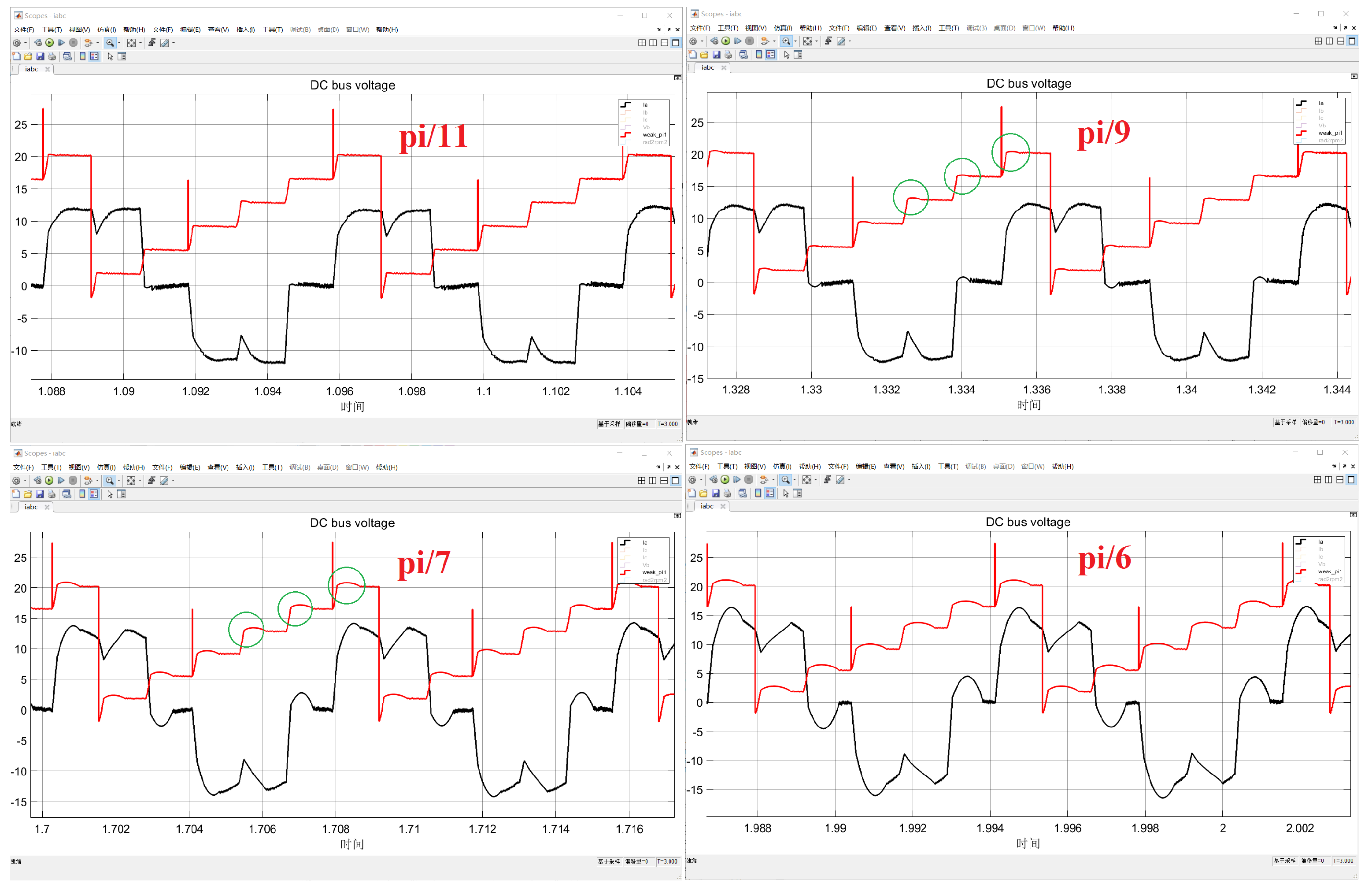
5.2.1. Change of Field Weakening Angle
5.2.2. Solving the Magnetic Potential
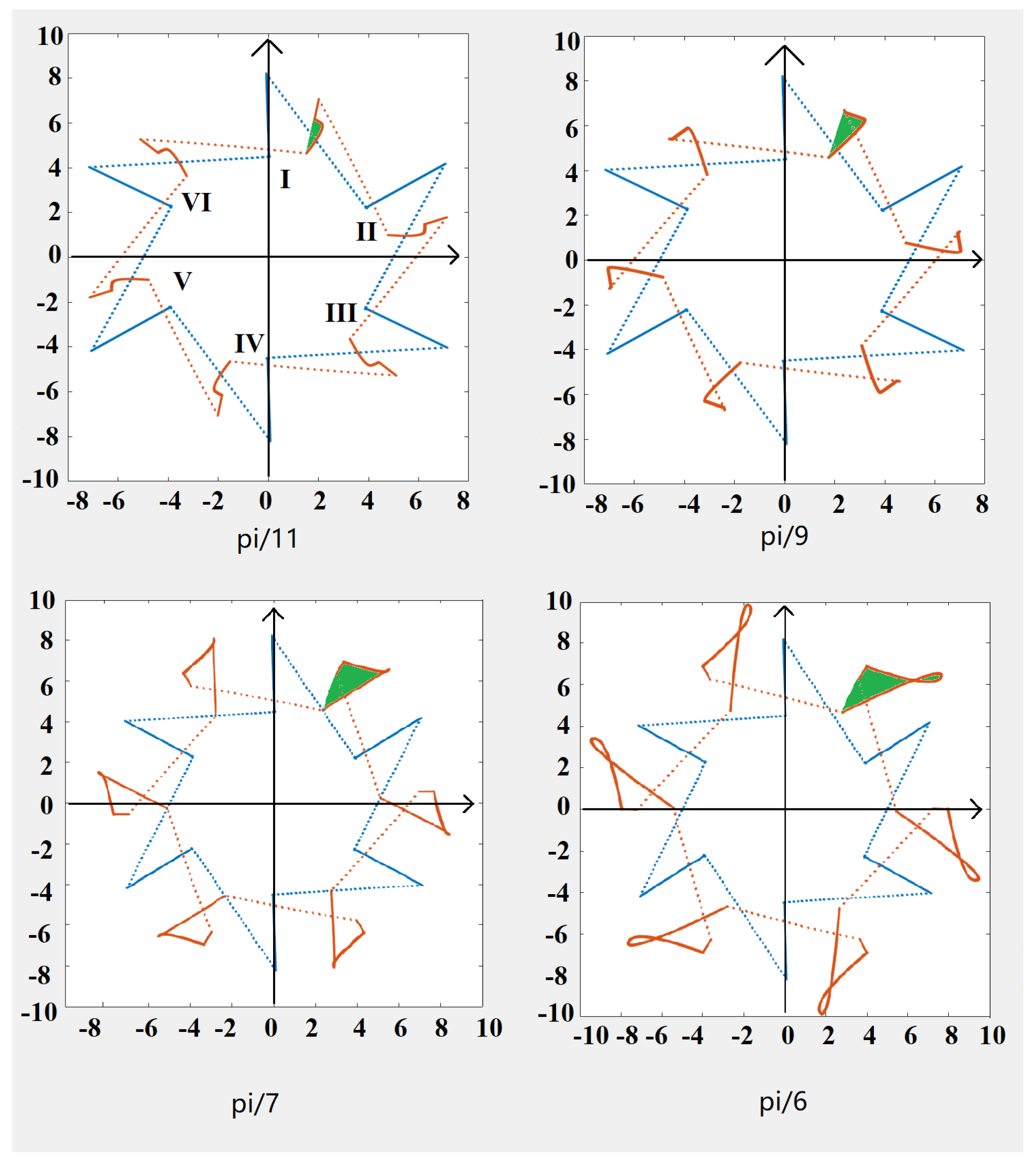
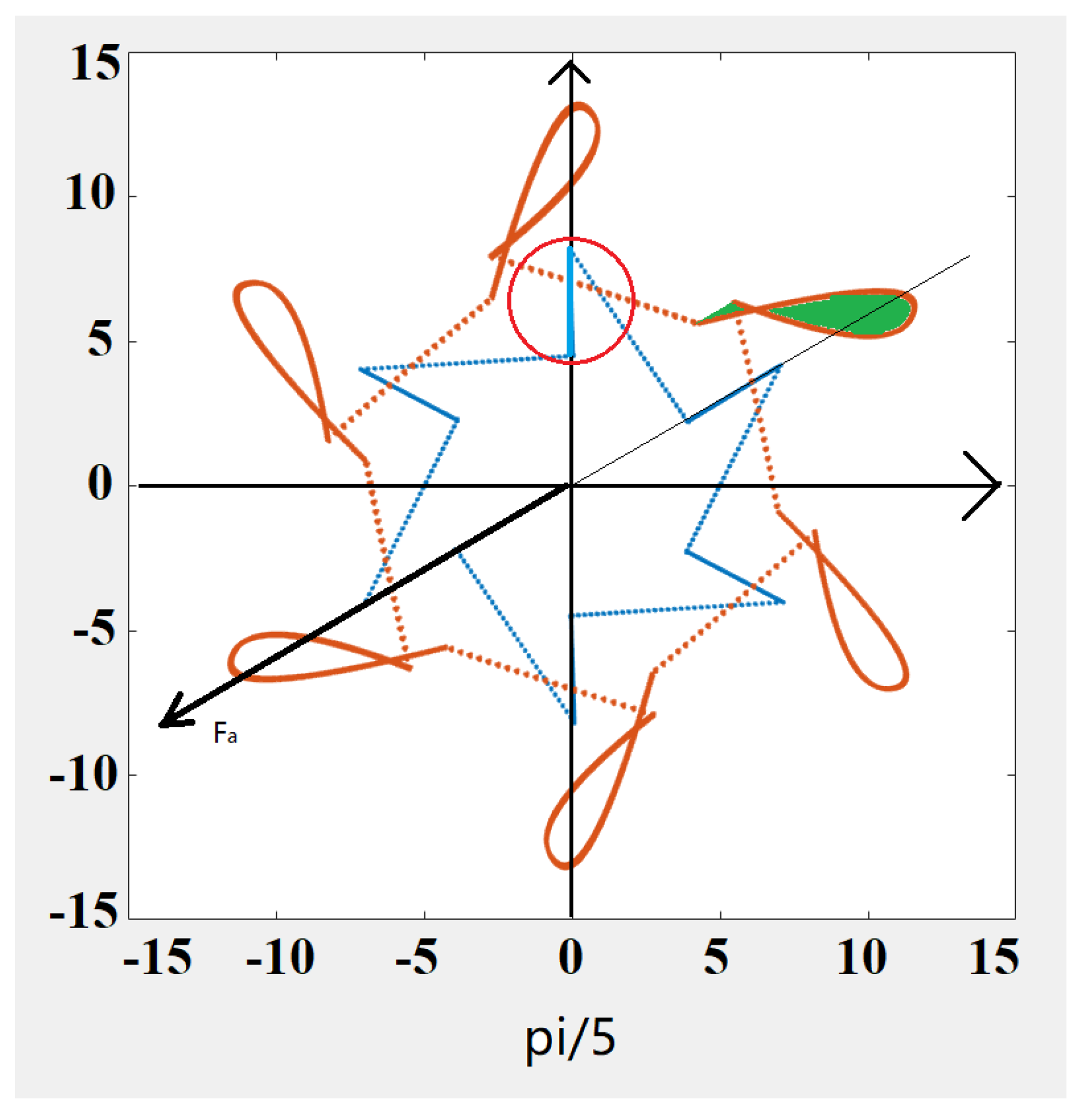
6. Analysis of Magnetic Potential Trajectory
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xia, C.; Fang, H. Permanent-Magnet Brushless DC Motor and Its Control. Trans. China Electrotech. Soc. 2012, 27, 25–34. [Google Scholar]
- Chu, K.S.K.; Chew, K.W.; Chang, Y.C. Fault-Diagnosis and Fault-Recovery System of Hall Sensors in Brushless DC Motor Based on Neural Networks. Sensors 2023, 23, 4330. [Google Scholar] [CrossRef] [PubMed]
- Du, J.; Li, C.; Zhao, J.; Ren, H.; Zhang, K.; Song, X.; Chen, L.; Yu, S.; Mi, Y. Investigation of Eddy Current Loss and Structure Design with Magnetic-Thermal Coupling for Toothless BLDC High-Speed PM Motor. Machines 2022, 10, 118. [Google Scholar] [CrossRef]
- Udayakumar, A.K.; Raghavan, R.R.V.; Houran, M.A.; Elavarasan, R.M.; Kalavathy, A.N.; Hossain, E. Three-Port Bi-Directional DC–DC Converter with Solar PV System Fed BLDC Motor Drive Using FPGA. Energies 2023, 16, 624. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, Y. An AEFA-Based Optimum Design of Fuzzy PID Controller for Attitude Control Flywheel with BLDC Motor. Aerospace 2022, 9, 789. [Google Scholar] [CrossRef]
- Jeon, K.; Yoo, D.; Park, J.; Lee, K.-D.; Lee, J.-J.; Kim, C.-W. Reliability-Based Robust Design Optimization for Maximizing the Output Torque of Brushless Direct Current (BLDC) Motors Considering Manufacturing Uncertainty. Machines 2022, 10, 797. [Google Scholar] [CrossRef]
- Ustun, O.; Kivanc, O.C.; Senol, S.; Fincan, B. On Field Weakening Performance of a Brushless Direct Current Motor with Higher Winding Inductance: Why Does Design Matter? Energies 2018, 11, 3119. [Google Scholar] [CrossRef]
- Fang, H.; Xia, C.; Fang, Y. Position servo control of brushless DC motor based on the second discrete filter. Proc. CSEE 2009, 29, 65–70. [Google Scholar]
- Zhang, F.; Du, G.; Wang, T.; Liu, G. Review on development and design of high speed machine. Trans. China Electrotech. Soc. 2016, 31, 1–18. [Google Scholar]
- Lai, Y.-S.; Lin, Y.-K. A Unified Approach to Zero-Crossing Point Detection of Back EMF for Brushless DC Motor Drives without Current and Hall Sensors. IEEE Trans. Power Electron. 2011, 26, 1704–1713. [Google Scholar] [CrossRef]
- Liu, W.; Li, R. Research on flux weakening mechanism of rare earth PMBLDCM. J. Northwestern Polytech. Univ. 2007, 25, 662–666. [Google Scholar]
- Matsui, N.; Takeshita, T.; Yasuda, K.A. New sensorless drive of brushless DC motor (VIEW record in Inspec). In Proceedings of the 1992 International Conference on Industrial Electronics, Control, Instrumentation, and Automation, San Diego, CA, USA, 9–13 November 1992; Volume 1–3, pp. 430–435. [Google Scholar]
- Tan, B.; Liu, W.-G.; Ma, R.-Q.; Zhao, J. Study on speed regulation of BLDCM with weak magnetic field. Small Spec. Electr. Mach. 2009, 12, 15–18. [Google Scholar]
- Li, R.; Liu, W.; Liu, X.; Liu, J. Analysis of Flux-Weakening by Eliminating Circulating Current in PM BLDCM. Trans. China Electrotech. Soc. 2007, 22, 62–67. [Google Scholar]
- Ha, J.I.; Ide, K.; Sawa, T.; Sul, S.K. Sensorless rotor position estimation of an interior permanent-magnet motor from initial states. IEEE Trans. Ind. Appl. 2003, 39, 761–767. [Google Scholar]
- Gałuszkiewicz, P.; Gałuszkiewicz, Z.; Baran, J. Simulation Studies of Energy Recovery in a BLDC Motor-Based Kinetic Energy Storage. Energies 2022, 15, 7494. [Google Scholar] [CrossRef]
- Gamazo-Real, J.C.; Vázquez-Sánchez, E.; Gómez-Gil, J. Position and Speed Control of Brushless DC Motors Using Sensorless Techniques and Application Trends. Sensors 2010, 10, 6901–6947. [Google Scholar] [CrossRef]
- Lee, K.-W.; Kim, D.-K.; Kim, B.-T.; Kwon, B.I. A novel starting method of the surface permanent-magnet BLDC motors without position sensor for reciprocating compressor. IEEE Trans. Ind. Appl. 2008, 44, 85–92. [Google Scholar] [CrossRef]
- Wang, Z.; Lu, K.; Blaabjerg, F. A Simple Startup Strategy Based on Current Regulation for Back-EMF-Based Sensorless Control of PMSM. IEEE Trans. Power Electron. 2012, 27, 3817–3825. [Google Scholar] [CrossRef]
- Lai, Y.-S.; Lin, Y.-K.; Chen, C.-W. New Hybrid Pulsewidth Modulation Technique to Reduce Current Distortion and Extend Current Reconstruction Range for a Three-Phase Inverter Using Only DC-link Sensor. IEEE Trans. Power Electron. 2013, 28, 1331–1337. [Google Scholar] [CrossRef]
- Chun, T.-W.; Tran, Q.-V.; Lee, H.-H.; Kim, H.G. Sensorless Control of BLDC Motor Drive for an Automotive Fuel Pump Using a Hysteresis Comparator. IEEE Trans. Power Electron. 2014, 29, 1382–1391. [Google Scholar] [CrossRef]
- Shao, J.W.; Nolan, D.; Teissier, M.; Swanson, D. A novel microcontroller-based sensorless brushless DC (BLDC) motor drive for automotive fuel pumps. IEEE Trans. Ind. Appl. 2003, 39, 1734–1740. [Google Scholar] [CrossRef]
- Kang, Y.; Lee, S.B.; Yoo, J. A microcontroller embedded AD converter based low cost sensorless technique for brushless DC motor drives. In Proceedings of the Conference Record of the 2005 IEEE Industry Applications Conference, Kowloon, Hong Kong, 2–6 October 2005; Volume 1–4, pp. 2176–2181. [Google Scholar]
- Lee, K.W.; Hong, J.; Lee, S.B.; Lee, S. Quality Assurance Testing for Magnetization Quality Assessment of BLDC Motors Used in Compressors. IEEE Trans. Ind. Appl. 2010, 46, 2452–2458. [Google Scholar] [CrossRef]
- Jahns, T.M. Flux-weakening regime operation of an interior permanent-magnet synchronous motor drive. IEEE Trans. Ind. Appl. 1987, 23, 681–689. [Google Scholar] [CrossRef]
- Ionel, D.M.; Balchin, M.J.; Eastham, J.F.; Demeter, E. Finite element analysis of brushless DC motors for flux weakening opreration. IEEE Trans. Magn. 1996, 32, 5040–5042. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Shen, J.X.; Howe, D. Flux-weakening characteristics of trapezoidal back-EMF machines in brushless DC and AC modes. In Proceedings of the CES/IEEE 5th International Power Electronics and Motion Control Conference, Shanghai, China, 14–16 August 2006; p. 908. [Google Scholar]
- Krishnan, R. Permanent Magnet Synchronous and Brushless DC Motor Drives; Taylor & Francis Group Thames: London, UK, 2010. [Google Scholar]
- Lee, D.-M.; Lee, W.-C. Analysis of Relationship Between Abnormal Current and Position Detection Error in Sensorless Controller for Interior Permanent-Magnet Brushless DC Motors. IEEE Trans. Magn. 2008, 44, 2074–2081. [Google Scholar]
- Guglielmi, P.; Pastorelli, M.; Vagati, A. Cross-saturation effects in IPM motors and related impact on sensorless control. IEEE Trans. Ind. Appl. 2006, 42, 1516–1522. [Google Scholar] [CrossRef]
- Li, J.; Liu, G.; Jia, H.P. Flux-weakeing control of Permanent Magnet Brushless DC Motor Used in E-bike. J. Nanjing Univ. Sci. Technol. (Nat. Sci.) 2009, 33, 76–80. [Google Scholar]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Wang, S.; Xia, L. Analysis of Inverter Circulating Current and Magnetic Potential for Flux-Weakening Drive of BLDCM. Electronics 2023, 12, 2450. https://doi.org/10.3390/electronics12112450
Li X, Wang S, Xia L. Analysis of Inverter Circulating Current and Magnetic Potential for Flux-Weakening Drive of BLDCM. Electronics. 2023; 12(11):2450. https://doi.org/10.3390/electronics12112450
Chicago/Turabian StyleLi, Xiaokun, Song Wang, and Lidong Xia. 2023. "Analysis of Inverter Circulating Current and Magnetic Potential for Flux-Weakening Drive of BLDCM" Electronics 12, no. 11: 2450. https://doi.org/10.3390/electronics12112450
APA StyleLi, X., Wang, S., & Xia, L. (2023). Analysis of Inverter Circulating Current and Magnetic Potential for Flux-Weakening Drive of BLDCM. Electronics, 12(11), 2450. https://doi.org/10.3390/electronics12112450