
A Novel Multi-Attack IDS Framework for Intelligent Connected Terminals Based on Over-the-Air Signature Updates


Abstract
1. Introduction
- Proposing a novel IDS by adopting OTA signature upgrades to improve the local computational performance and attack detection accuracy;
- Developing a multi-attack detection method by adopting a CNN based on an auto-encoder through the multiple classification function in ICTs;
- Presenting experimental results to demonstrate the non-negligible superiority of the proposed method in multi-attack detection for ICTs.
2. Related Work
2.1. Encryption and Authentication Techniques for ICT Security
2.2. Gateway Isolation Techniques for ICT Security
2.3. Intrusion Detection Techniques for ICT Security
3. System Model
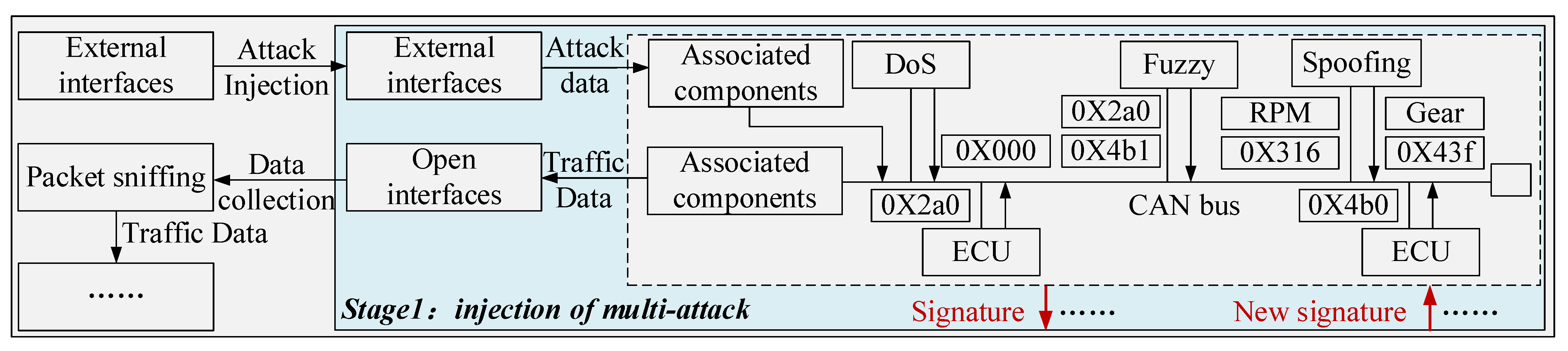
3.1. Stage 1: Injection of Multi-Attacks
3.2. Stage 2: Signature Update Based on OTA
3.3. Stage 3: CNN IDS Based on Auto-Encoder
3.3.1. Design of Auto-Encoder
3.3.2. Design of CNN
4. Results and Performance
4.1. Test Dataset
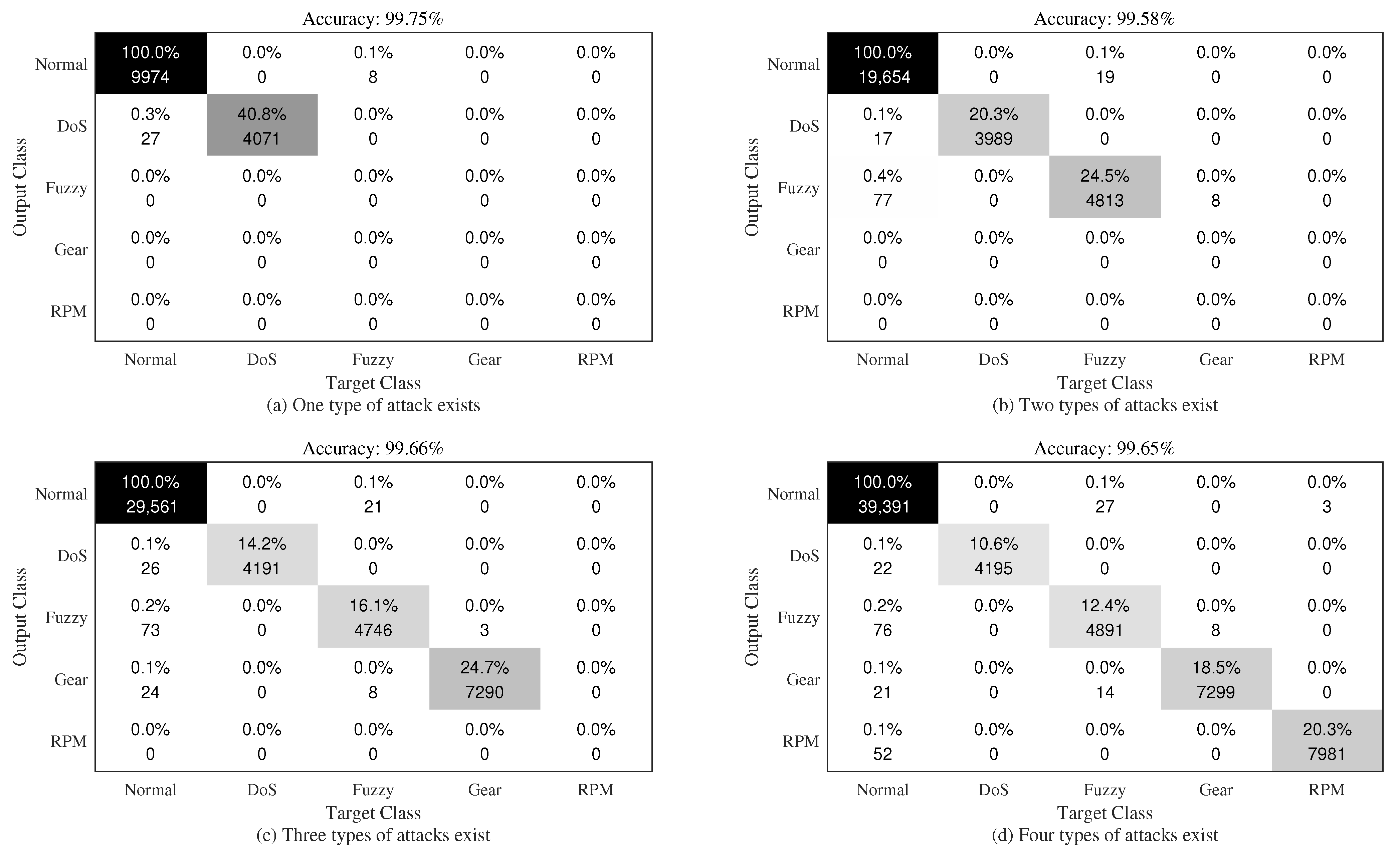
4.2. Experimental Results
4.3. Performance Evaluations
4.3.1. Computational Performance
4.3.2. Detection Performance
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhou, H.; Xu, W.; Chen, J.; Wang, W. Evolutionary V2X Technologies Toward the Internet of Vehicles: Challenges and Opportunities. Proc. IEEE 2020, 108, 308–323. [Google Scholar] [CrossRef]
- Wang, B.; Han, Y.; Wang, S.; Tian, D.; Cai, M.; Liu, M.; Wang, L. A Review of Intelligent Connected Vehicle Cooperative Driving Development. Mathematics 2022, 10, 3635. [Google Scholar] [CrossRef]
- Bhatia, R.; Kumar, V.; Serag, K.; Celik, Z.B.; Xu, D. Evading Voltage-Based Intrusion Detection on Automotive CAN. In Proceedings of the Network and Distributed System Security Symposium, Online, 21–25 February 2021. [Google Scholar] [CrossRef]
- Nicolae-Gabriel, V.; Paul, P.; Mihai, D. IoT Security Challenges for Smart Homes. In Education, Research and Business Technologies: Proceedings of the 21st International Conference on Informatics in Economy (IE 2022), Bucharest, Romania, 26–27 May 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 41–49. [Google Scholar] [CrossRef]
- Hassen, S. An Integrated Multilayered Framework for IoT Security Intrusion Decisions. Intell. Autom. Soft Comput. 2023, 36, 429–444. [Google Scholar] [CrossRef]
- Valasek, C.; Miller, C. Who’s behind the Wheel? Exposing the Vulnerabilities and Risks of High Tech Vehicles; IOActive: Seattle, WA, USA, 2015. [Google Scholar]
- Miller, C.; Valasek, C. Remote Exploitation of an Unaltered Passenger Vehicle. Black Hat USA 2015, 1–91. [Google Scholar]
- Lab, K.S. Car Hacking Research: Remote Attack Tesla Motors by Keen Security Lab. 2016. Available online: https://www.youtube.com/watch?v=c1XyhReNcHY (accessed on 20 September 2016).
- New China TV. See How Chinese Researchers Hacking Tesla at Hackers Conference. 2017. Available online: https://www.youtube.com/watch?v=VH4KgW-GchU (accessed on 29 July 2017).
- Keen Security Lab of Tencent. New Car Hacking Research: 2017, Remote Attack Tesla Motors Again. 2017. Available online: https://keenlab.tencent.com/en/2017/07/27/New-Car-Hacking-Research-2017-Remote-Attack-Tesla-Motors-Again/ (accessed on 27 July 2017).
- Cimpanu, C. Chinese Researchers Hack Tesla Model X in Impressive Video. 2017. Available online: https://www.bleepingcomputer.com/news/security/chinese-researchers-hack-tesla-model-x-in-impressive-video/ (accessed on 28 July 2017).
- Nie, S.; Liu, L.; Du, Y.; Zhang, W. Over-the-Air: How We Remotely Compromised the Gateway, Bcm, and Autopilot Ecus of Tesla Cars. 2018. Available online: https://data.hackinn.com/ppt/BlackHat-USA-2018/us-18-Liu-Over-The-Air-How-We-Remotely-Compromised-The-Gateway-Bcm-And-Autopilot-Ecus-Of-Tesla-Cars-wp.pdf (accessed on 31 July 2018).
- Lab, K.S. Contactless Attack against Xiaomi No.9 Balance Car. 2017. Available online: https://keenlab.tencent.com/zh/2017/04/01/remote-attack-on-mi-ninebot/ (accessed on 1 April 2017).
- Dee, T.; Tyagi, A. Secure CAN for Connected Vehicles. In Proceedings of the 2020 IEEE 6th World Forum on Internet of Things (WF-IoT), New Orleans, LA, USA, 2–16 June 2020. [Google Scholar] [CrossRef]
- Lukasiewycz, M.; Mundhenk, P.; Steinhorst, S. Security-Aware Obfuscated Priority Assignment for Automotive CAN Platforms. ACM Trans. Des. Autom. Electron. Syst. 2016, 21, 1–27. [Google Scholar] [CrossRef]
- Shreejith, S.; Fahmy, S.A. Security aware network controllers for next generation automotive embedded systems. In Proceedings of the Design Automation Conference, San Francisco, CA, USA, 8–12 June 2015. [Google Scholar] [CrossRef]
- Lin, C.W.; Yu, H. Invited—Cooperation or competition?: Coexistence of safety and security in next-generation ethernet-based automotive networks. In Proceedings of the ACM/IEEE Design Automation Conference, Austin, TX, USA, 5–9 June 2016. [Google Scholar] [CrossRef]
- Zheng, B.; Deng, P.; Anguluri, R.; Zhu, Q.; Pasqualetti, F. Cross-Layer Codesign for Secure Cyber-Physical Systems. IEEE Trans.-Comput.-Aided Des. Integr. Syst. Publ. IEEE Circuits Syst. Soc. 2016, 35, 699–711. [Google Scholar] [CrossRef]
- Murvay, P.S.; Popa, L.; Groza, B. Securing the controller area network with covert voltage channels. Int. J. Inf. Secur. 2021, 20, 817–831. [Google Scholar] [CrossRef]
- Yu, D.; Hsu, R.H.; Lee, J.; Lee, S. EC-SVC: Secure can bus in-vehicle communications with fine-grained access control based on edge computing. IEEE Trans. Inf. Forensics Secur. 2022, 17, 1388–1403. [Google Scholar] [CrossRef]
- Roca, I.; Wang, J.; Du, J.; Wei, S. A Semi-centralized Security Framework for In-Vehicle Networks. In Proceedings of the 2020 International Wireless Communications and Mobile Computing (IWCMC), Limassol, Cyprus, 15–19 June 2020. [Google Scholar] [CrossRef]
- Macher, G.; Sporer, H.; Brenner, E.; Kreiner, C. Signal-Layer Security and Trust-Boundary Identification based on Hardware-Software Interface Definition. J. Ubiquitous Syst. Pervasive Netw. 2018, 10, 1–9. [Google Scholar] [CrossRef]
- Waszecki, P.; Mundhenk, P.; Steinhorst, S.; Lukasiewycz, M.; Karri, R.; Chakraborty, S. Automotive Electrical and Electronic Architecture Security via Distributed In-Vehicle Traffic Monitoring. IEEE Trans. Comput. Aided Des. Integr. Syst. 2017, 36, 1790–1803. [Google Scholar] [CrossRef]
- Meng, W.; Zeng, H.; Chao, W.; Yu, H. Safety Guard: Runtime Enforcement for Safety-Critical Cyber-Physical Systems: Invited. In Proceedings of the Design Automation Conference, Austin, TX, USA, 18–22 June 2017. [Google Scholar] [CrossRef]
- Dutta, R.G.; Guo, X.; Zhang, T.; Kwiat, K.; Kamhoua, C.; Njilla, L.; Jin, Y. Estimation of Safe Sensor Measurements of Autonomous System Under Attack. In Proceedings of the Design Automation Conference, Austin, TX, USA, 18–22 June 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Choi, W.; Joo, K.; Jo, H.J.; Park, M.C.; Dong, H.L. VoltageIDS: Low-Level Communication Characteristics for Automotive Intrusion Detection System. IEEE Trans. Inf. Forensics Secur. 2018, 13, 2114–2129. [Google Scholar] [CrossRef]
- Katragadda, S.; Darby, P.; Roche, A.; Gottumukkala, R. Detecting Low-Rate Replay-based Injection Attacks on In-Vehicle Networks. IEEE Access 2020, 8, 54979–54993. [Google Scholar] [CrossRef]
- Taylor, A.; Japkowicz, N.; Leblanc, S. Frequency-based anomaly detection for the automotive CAN bus. In Proceedings of the 2015 World Congress on Industrial Control Systems Security (WCICSS), London, UK, 14–16 December 2015. [Google Scholar] [CrossRef]
- Cho, K.T.; Kang, G.S. Error Handling of In-vehicle Networks Makes Them Vulnerable. In Proceedings of the 2016 ACM SIGSAC Conference, Vienna, Austria, 24–28 October 2016. [Google Scholar] [CrossRef]
- Suda, H.; Natsui, M.; Hanyu, T. Systematic Intrusion Detection Technique for an In-vehicle Network Based on Time-Series Feature Extraction. In Proceedings of the 2018 IEEE 48th International Symposium on Multiple-Valued Logic (ISMVL), Linz, Austria, 16–18 May 2018; pp. 56–61. [Google Scholar] [CrossRef]
- Wu, W. Sliding Window Optimized Information Entropy Analysis Method for Intrusion Detection on In-Vehicle Networks. IEEE Access 2018, 6, 45233–45245. [Google Scholar] [CrossRef]
- Kang, M.J.; Kang, J.W. A Novel Intrusion Detection Method Using Deep Neural Network for In-Vehicle Network Security. In Proceedings of the 2016 IEEE 83rd Vehicular Technology Conference (VTC Spring), Nanjing, China, 15–18 May 2016. [Google Scholar] [CrossRef]
- Khan, Z.; Chowdhury, M.; Islam, M.; Huang, C.Y.; Rahman, M. Long Short-Term Memory Neural Network-Based Attack Detection Model for In-Vehicle Network Security. IEEE Sens. Lett. 2020, 4, 1–4. [Google Scholar] [CrossRef]
- Lopez-Martin, M.; Carro, B.; Sanchez-Esguevillas, A.; Lloret, J. Network Traffic Classifier With Convolutional and Recurrent Neural Networks for Internet of Things. IEEE Access 2017, 5, 18042–18050. [Google Scholar] [CrossRef]
- Lopez-Martin, M.; Nevado, A.; Carro, B. Detection of early stages of Alzheimer’s disease based on MEG activity with a randomized convolutional neural network. Artif. Intell. Med. 2020, 107, 101924. [Google Scholar] [CrossRef] [PubMed]
- Song, H.M.; Woo, J.; Kim, H.K. In-vehicle network intrusion detection using deep convolutional neural network. Veh. Commun. 2020, 21, 100198.1–100198.13. [Google Scholar] [CrossRef]
- Liang, H.; Jagielski, M.; Zheng, B.; Lin, C.W.; Kang, E.; Shiraishi, S.; Nita-Rotaru, C.; Zhu, Q. Network and system level security in connected vehicle applications. In Proceedings of the 2018 IEEE/ACM International Conference on Computer-Aided Design (ICCAD), San Diego, CA, USA, 5–8 November 2018. [Google Scholar] [CrossRef]
- Douiba, M.; Benkirane, S.; Guezzaz, A.; Azrour, M. An improved anomaly detection model for IoT security using decision tree and gradient boosting. J. Supercomput. 2023, 79, 3392–3411. [Google Scholar] [CrossRef]
- Saba, S.J.; Al-Nuaimi, B.T.; Suhail, R.A. A review of traditional, lightweight and ultra-lightweight cryptography techniques for IoT security environment. AIP Conf. Proc. 2023, 2475, 070001. [Google Scholar] [CrossRef]
- Fan, L.; Du, J.; Guo, Y.; Wang, H. A Security Defense Scheme for Encryption and Network Isolation Gateway in Power System. In Proceedings of the 2018 IEEE 4th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 14–16 December 2018; Volume 1, pp. 1243–1246. [Google Scholar] [CrossRef]
- Choi, H.; Kwon, H.; Lee, J.; Lee, Y.; Kim, K. Hardware-Based Isolation Technique to Guarantee Availability of Security Controls in a Gateway for Industrial Networks. In Proceedings of the 2023 International Conference on Electronics, Information, and Communication (ICEIC), Singapore, 27–28 November 2023; Volume 1, pp. 1–4. [Google Scholar] [CrossRef]
- Otoum, Y.; Nayak, A. Signature-Over-The-Air with Transfer Learning IDS for Intelligent Connected Vehicles (ICV). In Proceedings of the 2021 IEEE Globecom Workshops (GC Wkshps), Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Seo, E.; Song, H.M.; Kim, H.K. GIDS: GAN based Intrusion Detection System for In-Vehicle Network. In Proceedings of the 2018 16th Annual Conference on Privacy, Security and Trust (PST), Belfast, Ireland, 28–30 August 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Hu, R.; Wu, Z.; Xu, Y.; Lai, T. Multi-attack and multi-classification intrusion detection for vehicle-mounted networks based on mosaic-coded convolutional neural network. Sci. Rep. 2022, 12, 6295. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value |
|---|---|
| Input | X |
| Number of hidden neurons | 17 |
| Optimizer | Adam |
| Learning rate | 0.001 |
| Error calculation algorithm | Small-batch gradient descent method |
| Input of error algorithm | , |
| Batch size | 200 |
| Number of epochs | 5 |
| Output | Z |
| Type of Attack | Total Messages | Normal Messages | Injected Messages | Percentage of Normal Messages |
|---|---|---|---|---|
| DoS | 3,665,771 | 3,078,250 | 587,521 | 84.0% |
| Fuzzy | 3,838,860 | 3,347,013 | 491,847 | 87.2% |
| Gear | 4,443,142 | 3,845,890 | 597,252 | 86.6% |
| RPM | 4,621,702 | 3,966,805 | 654,897 | 85.8% |
| Normal | 988,987 | 988,987 | - | 100% |
| Number | Number of Attacks | Dataset |
|---|---|---|
| C1 | 1 | RPM |
| C2 | 1 | Gear |
| C3 | 1 | Fuzzy |
| C4 | 1 | DoS |
| C5 | 2 | Gear and RPM |
| C6 | 2 | Fuzzy and RPM |
| C7 | 2 | Fuzzy and Gear |
| C8 | 2 | DoS and RPM |
| C9 | 2 | DoS and Gear |
| C10 | 2 | DoS and Fuzzy |
| C11 | 3 | Fuzzy and Gear and RPM |
| C12 | 3 | DoS and Gear and RPM |
| C13 | 3 | DoS and Fuzzy and RPM |
| C14 | 3 | DoS and Fuzzy and Gear |
| C15 | 4 | DoS and Fuzzy and Gear and RPM |
| 11-bit CAN ID | 29-bit CAN ID | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Accuracy | Precision | Recall | F1 Score | Detection Time | Accuracy | Precision | Recall | F1 Score | Detection Time | |
| TL | 94.51% | 95.14% | 95.46% | 94.15% | 7.268 | 93.95% | 93.18% | 94.16% | 93.51% | 7.219 |
| RNN | 89.90% | 89.24% | 91.18% | 90.52% | 13.268 | 10.288 | 92.52% | 93.54% | 92.03% | 12.347 |
| DNN | 90.31% | 92.24% | 90.15% | 90.18% | 11.248 | 80.37% | 82.18% | 82.71% | 80.15% | 11.194 |
| SVM | 88.69% | 91.82% | 89.28% | 89.15% | 4.924 | 73.62% | 77.16% | 76.54% | 74.16% | 4.915 |
| Our method | 99.56% | 98.95% | 98.21% | 97.75% | 4.783 | 99.24% | 99.95% | 99.04% | 98.84% | 4.556 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Hu, W.; Qu, X.; Li, Y. A Novel Multi-Attack IDS Framework for Intelligent Connected Terminals Based on Over-the-Air Signature Updates. Electronics 2023, 12, 2267. https://doi.org/10.3390/electronics12102267
Li B, Hu W, Qu X, Li Y. A Novel Multi-Attack IDS Framework for Intelligent Connected Terminals Based on Over-the-Air Signature Updates. Electronics. 2023; 12(10):2267. https://doi.org/10.3390/electronics12102267
Chicago/Turabian StyleLi, Beibei, Wei Hu, Xue Qu, and Yiwei Li. 2023. "A Novel Multi-Attack IDS Framework for Intelligent Connected Terminals Based on Over-the-Air Signature Updates" Electronics 12, no. 10: 2267. https://doi.org/10.3390/electronics12102267
APA StyleLi, B., Hu, W., Qu, X., & Li, Y. (2023). A Novel Multi-Attack IDS Framework for Intelligent Connected Terminals Based on Over-the-Air Signature Updates. Electronics, 12(10), 2267. https://doi.org/10.3390/electronics12102267