
Allocation of Charging Stations for Electric Vehicles Considering Spatial Difference in Urban Land Price and Fixed Budget


Abstract
1. Introduction
- (1)
- In order to minimize the traveling time of EVs transporting goods among cities, the model for the allocation of CSs is established with optimized distribution of EV flows. The urban transportation network model is established with spatial network.
- (2)
- FBCRPA is designed based on TSA to optimize the allocation of EV CSs, which takes land price into account.
- (3)
- Comprehensive experiments are performed, showing that:
- (a)
- FBCRPA could give a high-quality budget scheme and it performs better than baseline methods, e.g, nodal-centrality-based heuristic [21].
- (b)
- Drivers’ traveling time would decrease with increase in difference in land price. Under the budget scheme given by FBCRPA, the budget would transfer from central region to other regions and the carrying capacity of the charging system would improve.
- (c)
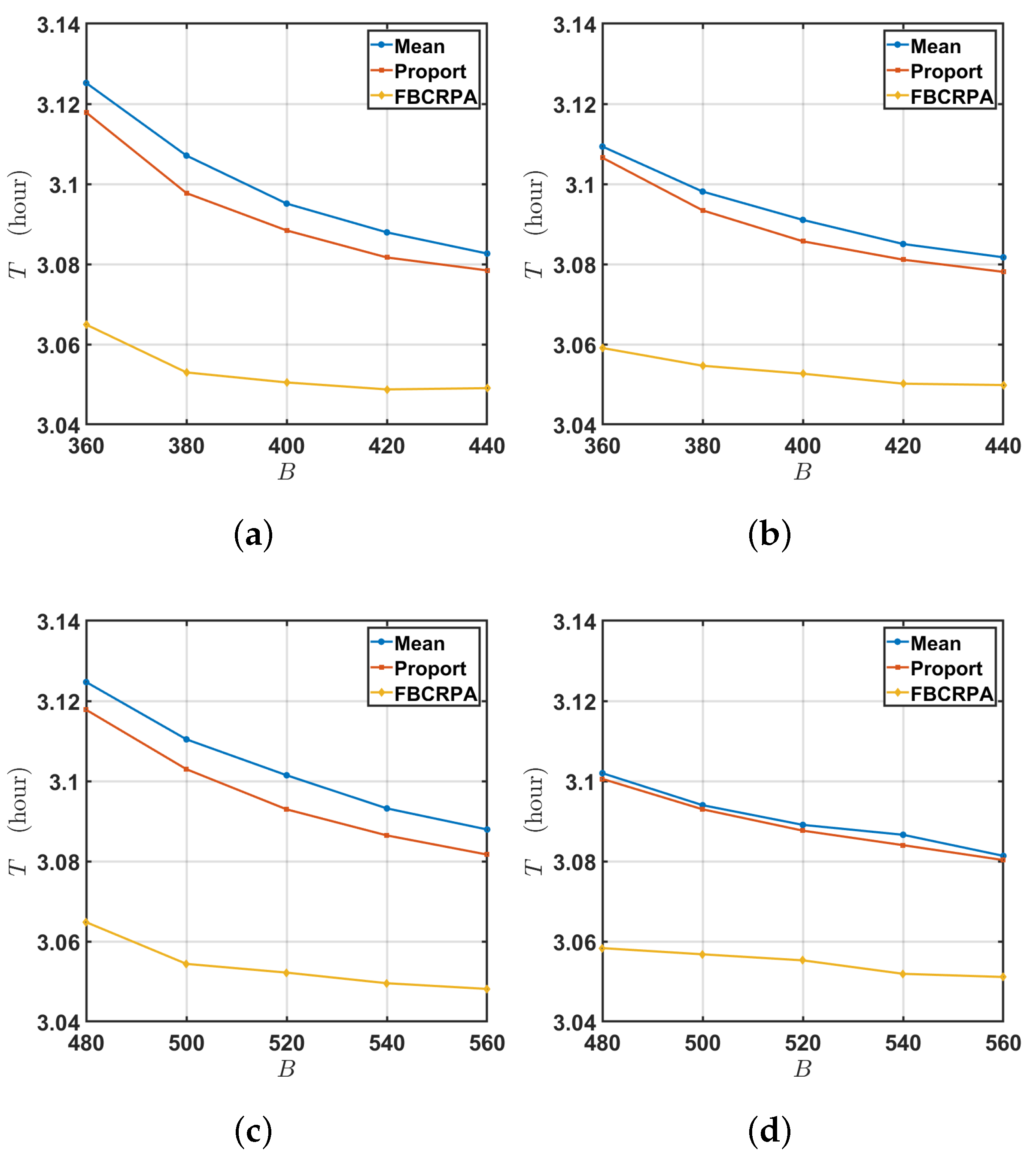
- Increasing the budget (for purchasing chargers) can effectively decrease the expected traveling time of passengers, yet there are limits to the benefits of doing so. Moreover, the proposed model facilitate the identification of an “upper bound”, safe-guarding the cost-effectiveness of the investment.
2. Models of System and Problem Formulation
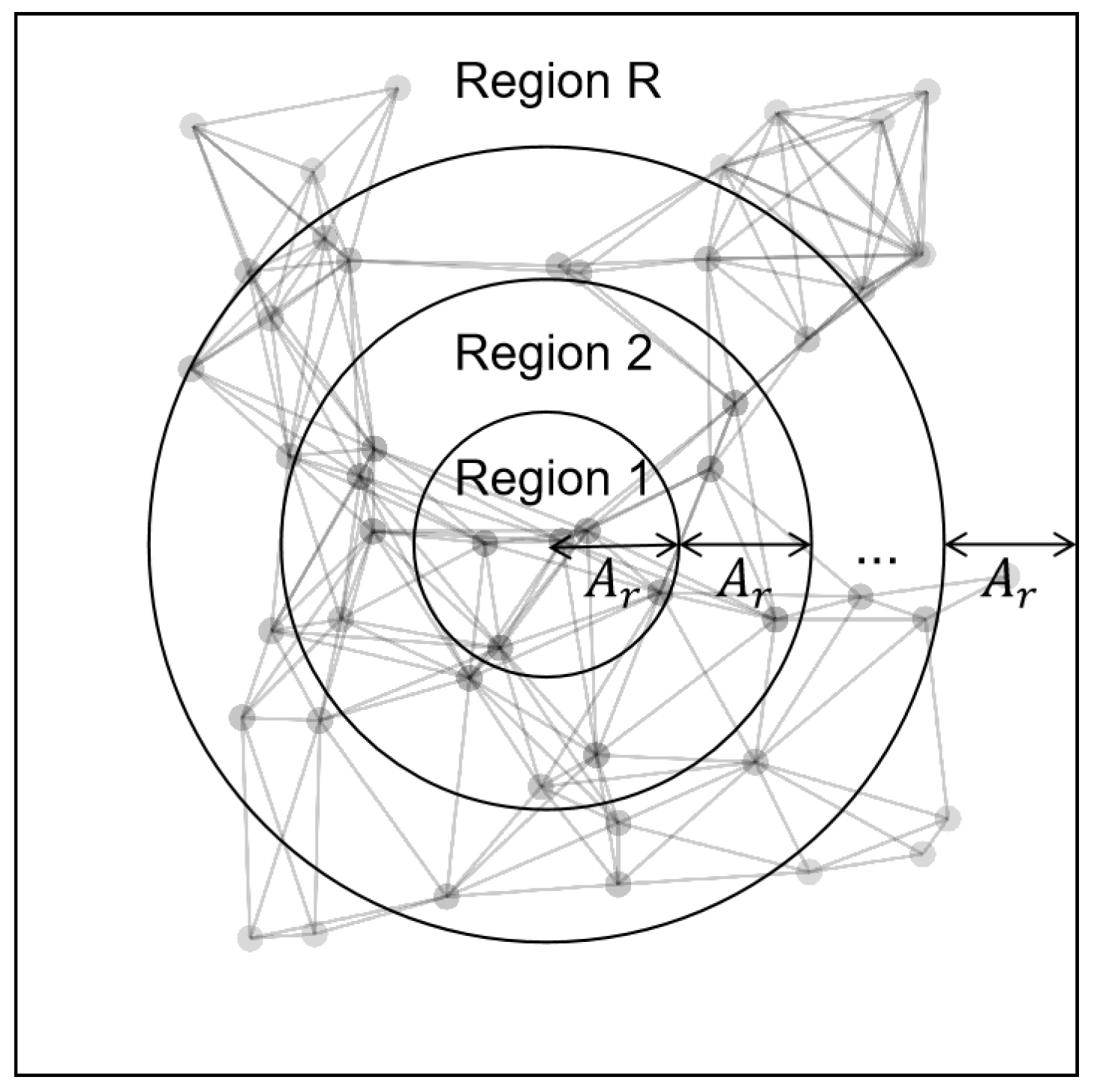
2.1. Urban Transportation Network Model
- (1)
- is the path length of edge in urban transportation network, in kilometers;
- (2)
- is the free-flow driving time of the edge , in hour;
- (3)
- is the traffic flow capacity of edge , in EVs/hour;
- (4)
- is the part of reserved for vehicles without charging demand; it is the realization of a random variable , which follows a normal distribution, .
- (1)
- The CSs allocated at the distribution network of power grids.
- (2)
- The chargers installed in CSs have same specification and price;
- (3)
- The queue of EVs at CSs operates on a first-in, first-out principle;
- (4)
- The charging time of EVs in CSs follows a general distribution, e.g., teuncated normal distribution with mean , variance .
2.2. Allocation Model of CSs
2.3. Model of EV Flow Distribution
3. Design of Algorithm
3.1. The FBCRPA Building Blocks
- (1)
- Coding: The candidate solution of additional charging resources allocation is represented by . is the number of chargers to be installed at CS .
- (2)
- Construct Neighborhood: TSA explores the solution space by iteratively moving from one potential solution to an immediate and improved neighbor. The neighborhood structure of FBCRPA is defined as follows:
- (a)
- Match: Randomly select two CSs and () to match, and then operate on their respective budgets ( and );
- (b)
- Shift: For selected budget pair and , if , (that is, the budget of one node can at least build a charger at the other node), one of them chosen at random, say , will move to , . If one of them, such as , there is a 50 % chance for that part of the budget will be given to according to the above steps. If , , this budget pair will not be operated.
3.2. The FBCRPA Procedures
| Algorithm 1 Fixed Budget Charging Resources Planning Algorithm (FBCRPA) |
|
4. Simulation Result
4.1. Settings for Simulation
4.2. Performance of Algorithm
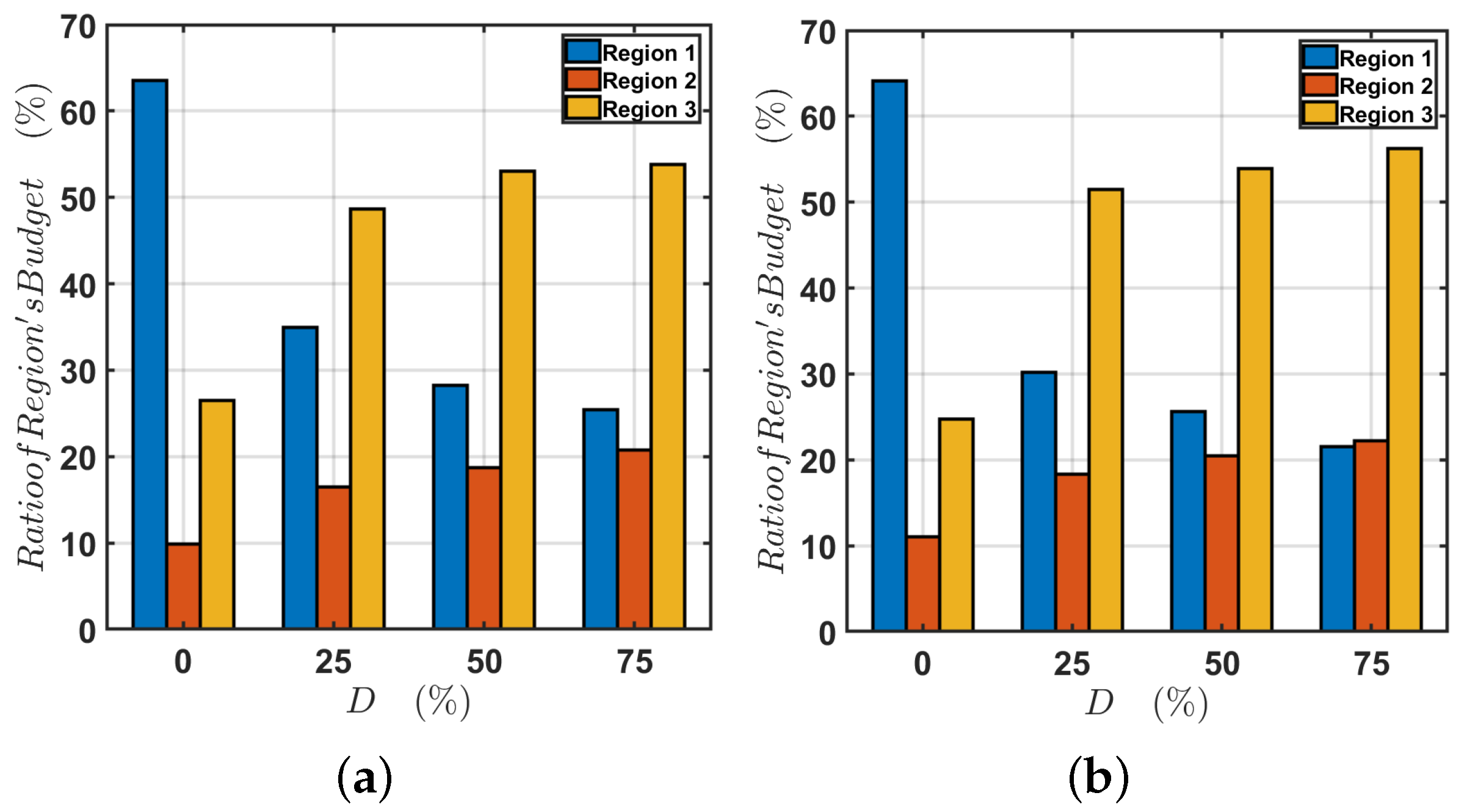
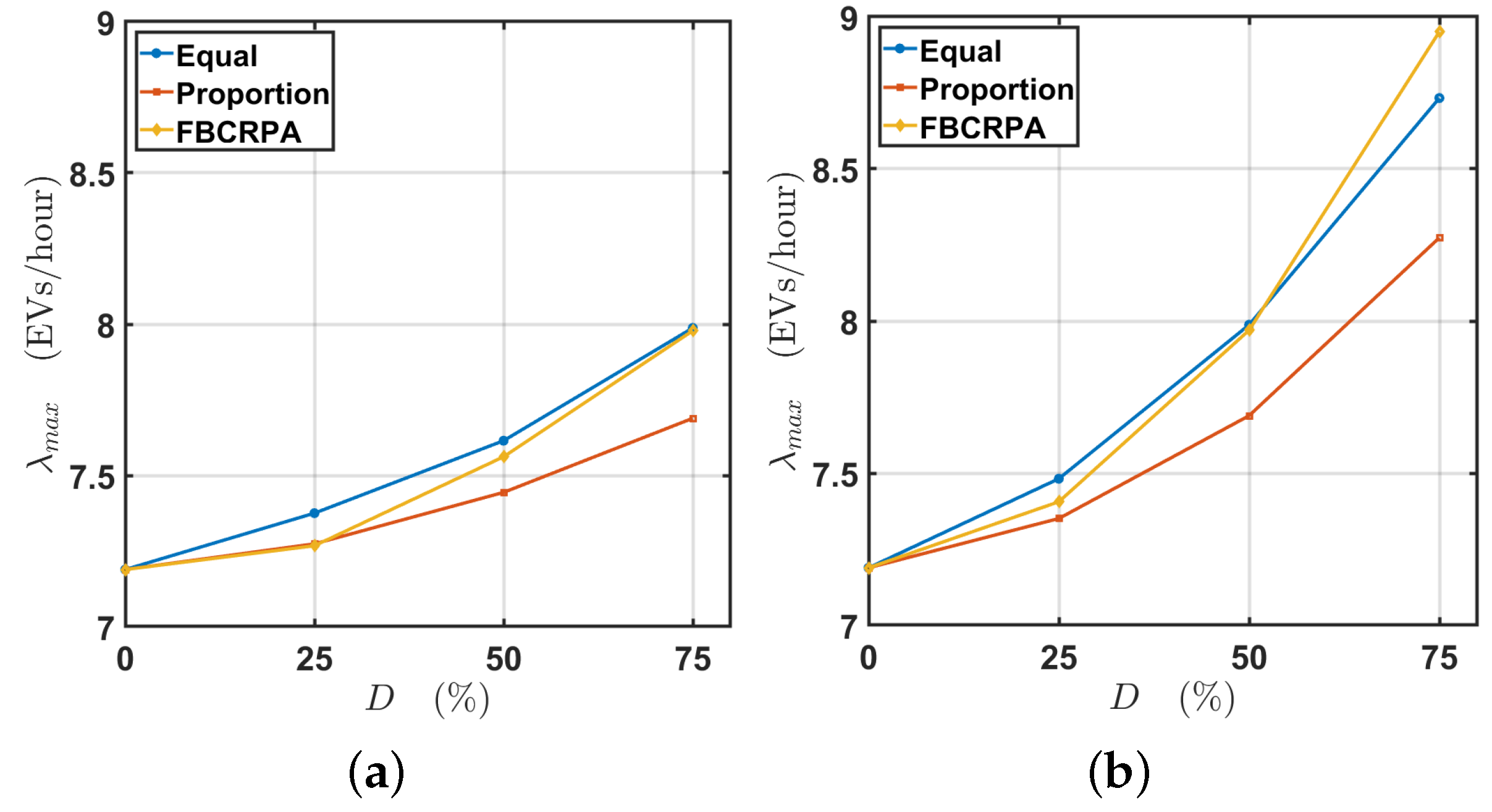
4.3. Impact of Land Price Differences
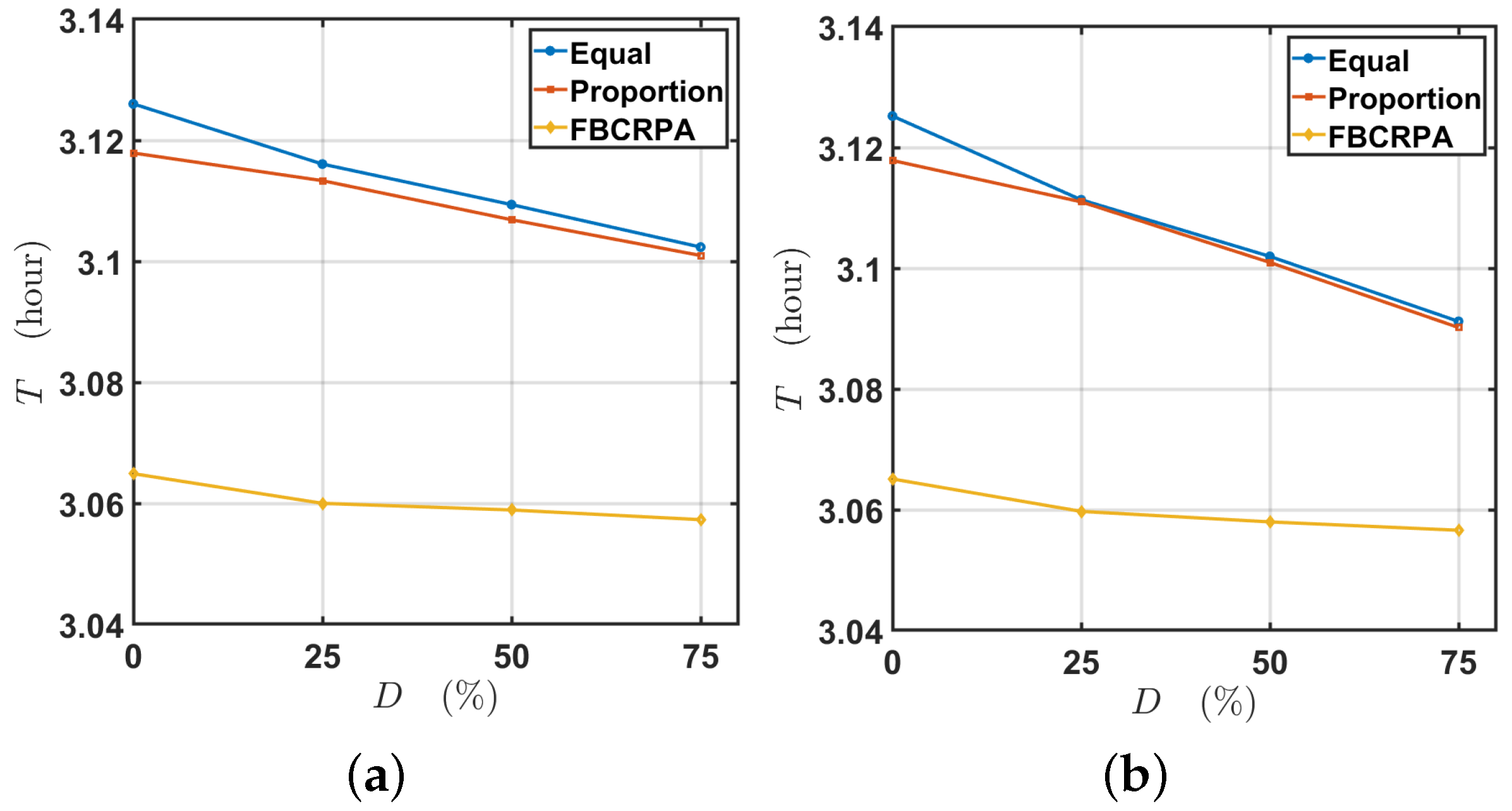
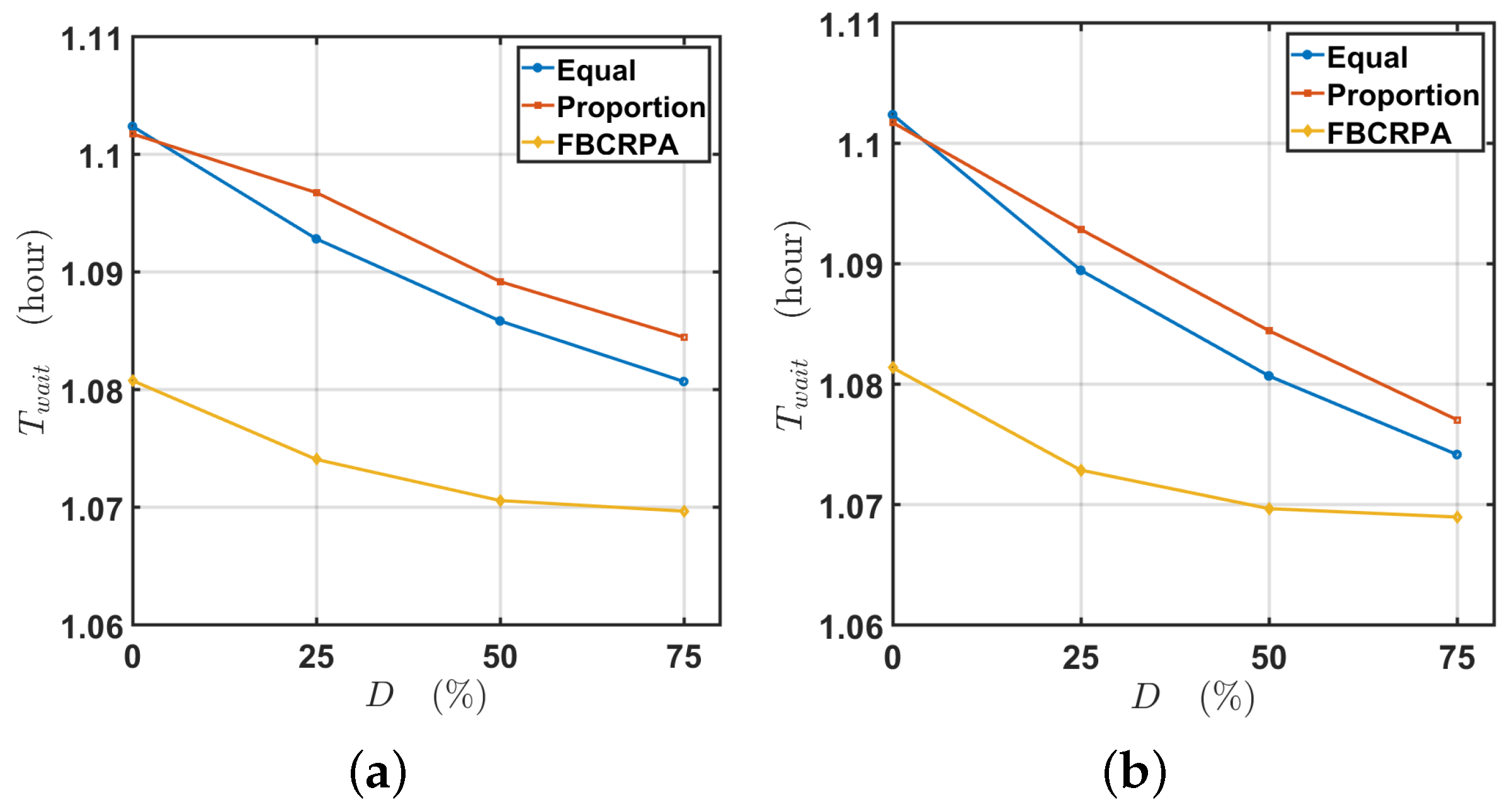
- (1)
- It is found that if the total budget remains unchanged, T will gradually decrease as the gap in land price becomes larger. This paper obtains the conclusion that the large difference amplifies the transfer of budgets between regions, leading to more chargers in total. This is also why the decrease in T is primarily driven by the decrease in .
- (2)
- The effectiveness of FBCRPA is proved by comparing with three budget schemes. In cotrast to centrality-based methods, FBCRPA does not blindly increase the number of chargers. Instead, they spend the budget more wisely so that the charging resources can be better utilized by EV flows.
4.4. Impact of Budget
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| The set of weights associated with the edges. | |
| A | The side length of the specified space. |
| B | The total budget in this planning. |
| The transfer budget of charging . | |
| Erlang C formula. | |
| The weighted betweenness centrality of node k. | |
| C | The price of charger. |
| The set of neighborhood solution of are generated by matching and shifting. | |
| The number of selected nodes in region r. | |
| c | The set of chargers in charging system. |
| The set of chargers installed in CS. | |
| The set of additional chargers. | |
| D | The percentage of difference in land price, e.g., difference range. |
| The path length of edge in urban transportationnetwork, in kilometers. | |
| The distance from node m to n. | |
| The maximum range of EV. | |
| E | The maximum number of solutions stored in Tabu list. |
| The set of edges in urban transportation network. | |
| The construction cost of chargers. | |
| The network with charging facilities. | |
| The nodes in the network. | |
| The leaf node of path P (excluding the end point n, before n). | |
| Tabu list. | |
| M | The average price of all regions, e.g., land price benchmark. |
| N | The number of trees generated in the whole network, that is, the number of |
| unreachable pairs. | |
| Connection radius. | |
| P | A qualified path on tree . |
| The traffic flow capacity of edge , in EVs/hour. | |
| R | The number of regions in the specified area. |
| S | The number of networks. |
| The kth CS. | |
| T | The average shortest traveling time. |
| The driving time of T. | |
| The waiting time of T. | |
| The set of nodes in urban transportation network. | |
| The actual driving time of the edge , in hour. | |
| The candidate set of nodes located CSs. | |
| The number of CSs. | |
| X | The number of nodes in the specified area. |
| , | Parameters used to adjust the impact of traffic congestion. |
| The part of reserved for vehicles without charging demand. | |
| The reserved resources to prevent over reception. | |
| The EV flow with charging demand on , in EVs/hour. | |
| The EV flow between . | |
| The flow on in . | |
| The flow on P. | |
| The carrying capacity of EV flow between unreachable pairs for spactial network. | |
| The EV flow converged at . | |
| The free-flow driving time of the edge , in hour. | |
| The sum of driving time and waiting time of EV on path P. | |
| The number of all shortest paths between . | |
| The part of passing through node k. |
References
- Bi, X.; Tang, W.K.S. Logistical Planning for Electric Vehicles Under Time-Dependent Stochastic Traffic. IEEE Trans. Intell. Transp. Syst. 2018, 20, 3771–3781. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, J.; Cai, L.; Pan, J. EV Charging Network Design with Transportation and Power Grid Constraints. In Proceedings of the IEEE Conference on Computer Communications, Honolulu, HI, USA, 16–19 April 2018; pp. 2492–2500. [Google Scholar]
- Wang, S.; Dong, Z.Y.; Luo, F.; Meng, K.; Zhang, Y. Stochastic Collaborative Planning of Electric Vehicle Charging Stations and Power Distribution System. IEEE Trans. Ind. Informat. 2018, 14, 321–331. [Google Scholar] [CrossRef]
- Ma, T.Y.; Xie, S. Optimal fast charging station locations for electric ridesharing with vehicle-charging station assignment. Transp. Res. Part D Transp. Environ. 2021, 90, 102682. [Google Scholar] [CrossRef]
- Luo, C.; Huang, Y.; Gupta, V. Placement of EV Charging Stations—Balancing Benefits Among Multiple Entities. IEEE Trans. Smart Grid 2017, 8, 759–768. [Google Scholar] [CrossRef]
- Sun, Z.; Zhou, X.; Du, J.; Liu, X. When Traffic Flow Meets Power Flow: On Charging Station Deployment With Budget Constraints. IEEE Trans. Veh. Technol. 2017, 66, 2915–2926. [Google Scholar] [CrossRef]
- Sadeghi-Barzani, P.; Rajabi-Ghahnavieh, A.; Kazemi-Karegar, H. Optimal fast charging station placing and sizing. Appl. Energy 2014, 125, 289–299. [Google Scholar] [CrossRef]
- Bi, X.; Chipperfield, A.J.; Tang, W.K.S. Coordinating Electric Vehicle Flow Distribution and Charger Allocation by Joint Optimization. IEEE Trans. Ind. Informat. 2021, 17, 8112–8121. [Google Scholar] [CrossRef]
- Lam, A.Y.S.; Leung, Y.W.; Chu, X. Electric Vehicle Charging Station Placement: Formulation, Complexity, and Solutions. IEEE Trans. Smart Grid 2014, 5, 2846–2856. [Google Scholar] [CrossRef]
- Xiong, Y.; Gan, J.; An, B.; Miao, C.; Bazzan, A.L.C. Optimal Electric Vehicle Fast Charging Station Placement Based on Game Theoretical Framework. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2493–2504. [Google Scholar] [CrossRef]
- Liu, Z.; Wen, F.; Gerard, L. Optimal Planning of Electric-Vehicle Charging Stations in Distribution Systems. IEEE Trans. Power Del. 2013, 28, 102–110. [Google Scholar] [CrossRef]
- Li, Y.; Zheng, N.; Zhang, J.; Cai, Q.; Zhong, Z.; Qian, X. Planning Model for Electric Vehicle Charging Station Considering Battery Capacity. In Proceedings of the 2021 IEEE 5th Conference on Energy Internet and Energy System Integration (EI2), Taiyuan, China, 22–24 October 2021; pp. 3768–3771. [Google Scholar]
- Hayajneh, H.S.; Salim, M.N.B.; Bashetty, S.; Zhang, X. Optimal Planning of Battery-Powered Electric Vehicle Charging Station Networks. In Proceedings of the IEEE Conference on Green Technologies, Lafayette, LA, USA, 3–6 April 2019; pp. 1–4. [Google Scholar]
- Zheng, Y.; Dong, Z.; Xu, Y.; Meng, K.; Zhao, J.; Qiu, J. Electric Vehicle Battery Charging/Swap Stations in Distribution Systems: Comparison Study and Optimal Planning. IEEE Trans. Power Syst. 2014, 29, 221–229. [Google Scholar] [CrossRef]
- Chen, T.D.; Kockelman, K.M. The Electric Vehicle Charging Station Location Problem: A Parking-based Assignment Method for Ssettle. 2013. Available online: https://www.caee.utexas.edu/prof/kockelman/public_html/TRB13EVparking.pdf (accessed on 2 February 2022).
- Wang, G.; Zhang, X.; Wang, H.; Peng, J.C.; Jiang, H.; Liu, Y.; Wu, C.; Xu, Z.; Liu, W. Robust Planning of Electric Vehicle Charging Facilities With an Advanced Evaluation Method. IEEE Trans. Ind. Informat. 2018, 14, 866–876. [Google Scholar] [CrossRef]
- Kabir, M.; Assi, C.; Alameddine, H.; Antoun, J.; Yan, J. Demand-Aware Provisioning of Electric Vehicles Fast Charging Infrastructure. IEEE Trans. Veh. Technol. 2020, 69, 6952–6963. [Google Scholar] [CrossRef]
- Schoenberg, S.; Buse, D.S.; Dressler, F. Siting and Sizing Charging Infrastructure for Electric Vehicles with Coordinated Recharging. IEEE Trans. Intell. Veh. 2022. [Google Scholar] [CrossRef]
- Wang, N.; Wang, C.; Niu, Y.; Yang, M.; Yu, Y. A Two-Stage Charging Facilities Planning Method for Electric Vehicle Sharing Systems. IEEE Trans. Ind. Appl. 2021, 57, 149–157. [Google Scholar] [CrossRef]
- Zhao, Z.; Xu, M.; Lee, C.K.M. Capacity Planning for an Electric Vehicle Charging Station Considering Fuzzy Quality of Service and Multiple Charging Options. IEEE Trans. Veh. Technol. 2021, 70, 12529–12541. [Google Scholar] [CrossRef]
- Chen, G.; Wang, X.; Li, X. Fundamentals of Complex Networks: Models, Structures and Dynamics; Wiley: New York, NY, USA, 2015. [Google Scholar]
- Dall, J.; Christensen, M. Random Geometric Graphs. Phys. Rev. E 2002, 66, 16121. [Google Scholar] [CrossRef]
- Barthelemy, M. Spatial Networks. Phys. Rep. 2010, 499, 1–101. [Google Scholar] [CrossRef]
- Bi, X.; Tang, W.K.S.; Han, Z.; Zhou, J. Distributing Electric Vehicles to the Right Charging Queues. In Proceedings of the 2019 IEEE International Symposium on Circuits and Systems (ISCAS), Sapporo, Japan, 26–29 May 2019; pp. 1–5. [Google Scholar]
- Urban Planning Division: Office of Planning; Bureau of Public Roads: Washington, DC, USA, 1964.
- Lee, A.; Longton, P. Queueing Processes Associated with Airline Passenger Check-in. J. Oper. Res. Soc. 1959, 10, 56–71. [Google Scholar] [CrossRef]
- Glover, F.; Laguna, M. Tabu Search. In Handbook of Conbinatorial Optimization; Springer: New York, NY, USA, 1998; pp. 2093–2229. [Google Scholar]
- MATLAB Optimization Toolbox: Fmincon. In Matlab R2018b; The MathWorks: Natick, MA, USA, 2018.
- Tirunagari, S.; Gu, M.; Meegahapola, L. Reaping the Benefits of Smart Electric Vehicle Charging and Vehicle-to-Grid Technologies: Regulatory, Policy and Technical Aspects. IEEE Access 2022, 10, 114657–114672. [Google Scholar] [CrossRef]
- Ye, Z.; Gao, Y.; Yu, N. Learning to Operate an Electric Vehicle Charging Station Considering Vehicle-Grid Integration. IEEE Trans. Smart Grid 2022, 13, 3038–3048. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | |||
|---|---|---|---|
| 1 | 1.5 | 1.5 | 1.5 |
| 2 | 1.625 | 1.5 | 1.375 |
| 3 | 1.75 | 1.5 | 1.25 |
| 4 | 1.875 | 1.5 | 1.125 |
| Group | |||
|---|---|---|---|
| 1 | 2 | 2 | 2 |
| 2 | 2.25 | 2 | 1.75 |
| 3 | 2.5 | 2 | 1.5 |
| 4 | 2.75 | 2 | 1.25 |
| Parameter | Setting |
|---|---|
| Number of spatial networks | 10 |
| Distribution of charging time | |
| truncation interval of charging time distribution | [0.3,0.7] |
| Utilization of road flow capacity | |
| Percentage of reserved charging resources | 10% |
| Number of iterations | 100 |
| Length of Tabu list | 5 |
| Size of neighborhood | 5 |
| Group | Difference Range (D) |
|---|---|
| 1 | 0% |
| 2 | 25% |
| 3 | 50% |
| 4 | 75% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, D.; Xia, Y.; Bi, X.; Gu, X. Allocation of Charging Stations for Electric Vehicles Considering Spatial Difference in Urban Land Price and Fixed Budget. Electronics 2023, 12, 190. https://doi.org/10.3390/electronics12010190
Fu D, Xia Y, Bi X, Gu X. Allocation of Charging Stations for Electric Vehicles Considering Spatial Difference in Urban Land Price and Fixed Budget. Electronics. 2023; 12(1):190. https://doi.org/10.3390/electronics12010190
Chicago/Turabian StyleFu, Dingtao, Yongxiang Xia, Xiaowen Bi, and Xuan Gu. 2023. "Allocation of Charging Stations for Electric Vehicles Considering Spatial Difference in Urban Land Price and Fixed Budget" Electronics 12, no. 1: 190. https://doi.org/10.3390/electronics12010190
APA StyleFu, D., Xia, Y., Bi, X., & Gu, X. (2023). Allocation of Charging Stations for Electric Vehicles Considering Spatial Difference in Urban Land Price and Fixed Budget. Electronics, 12(1), 190. https://doi.org/10.3390/electronics12010190