
Low-Dimensional-Approximate Model Based Improved Fuzzy Non-Singular Terminal Sliding Mode Control for Rigid-Flexible Manipulators


Abstract
1. Introduction
- (1)
- For the low-order model belonging to the non-minimum phase system, the output redefinition [61] is used to redefine the output observer, which not only keeps the system’s main characteristics, but also reduces the degree of freedom of the system on the premise of the unknown and clear loss of the solution accuracy. This results in great convenience for the system analysis and controller design.
- (2)
- A novel fuzzy control strategy is proposed. It uses the improved fuzzy method and introduces the variable universe concept in order to adaptively adjust the range of the input and output universe. Without adding fuzzy rules, the control law is dynamically compensated in real time, so as to improve the convergence speed of the system, under the condition of overcoming jitter.
- (3)
- Combining the redefined output observer of the proposed low-order model with the fuzzy non-singular terminal slide controller, the convergence speed is improved, and the chattering problem of sliding mode control is reduced. The accurate positioning of the end of the rigid-flexible manipulators and the suppression of residual vibration are then achieved.
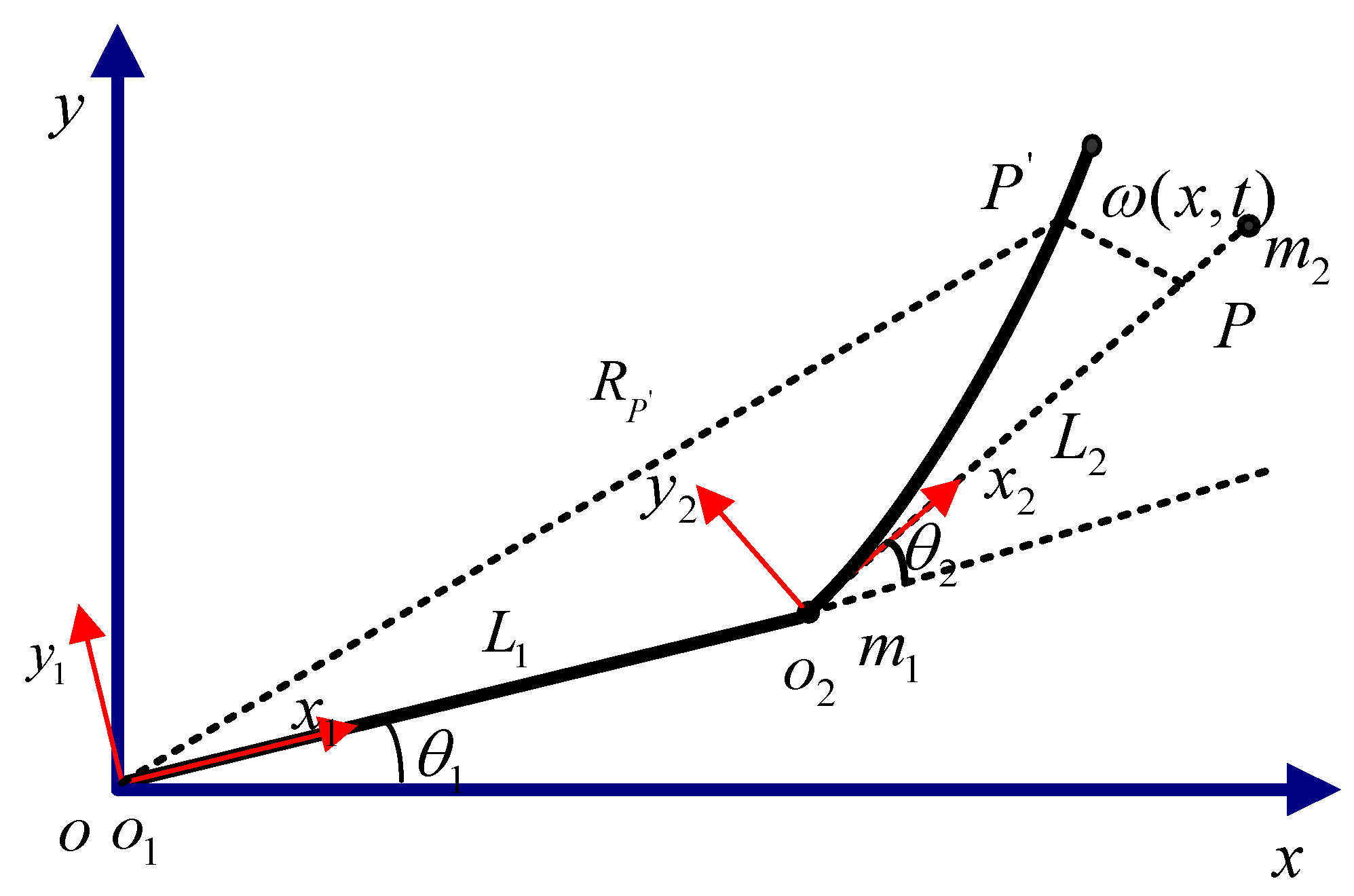
2. Dynamic Modeling of the Rigid-Flexible Manipulators System
3. Output Redefinition
4. Linearization of the Input and Output Subsystems
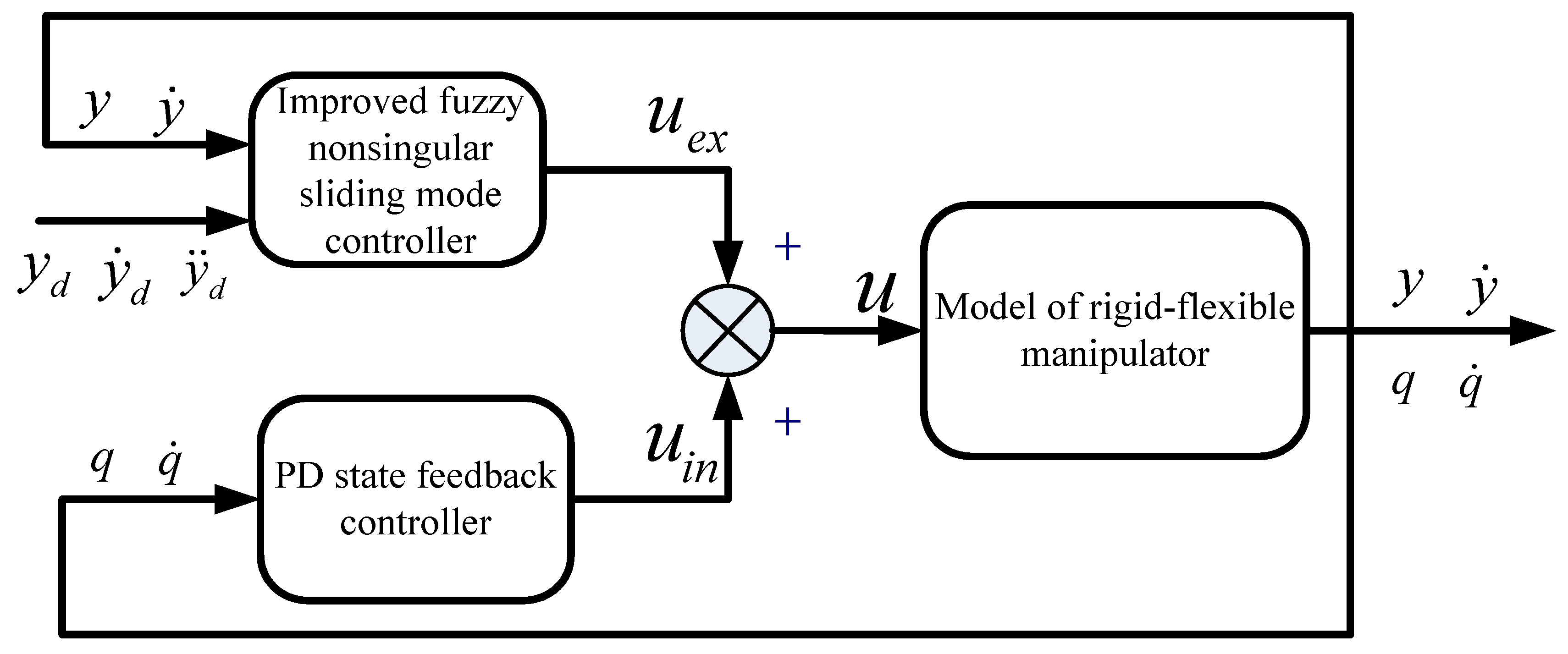
5. Controller Design
5.1. Stabilization of Interconnected Subsystems Based on PD State Feedback
5.2. Design of Non-Singular Terminal Sliding Mode Controller
5.3. Design of Improved Fuzzy Non-Singular Terminal Sliding Mode Controller
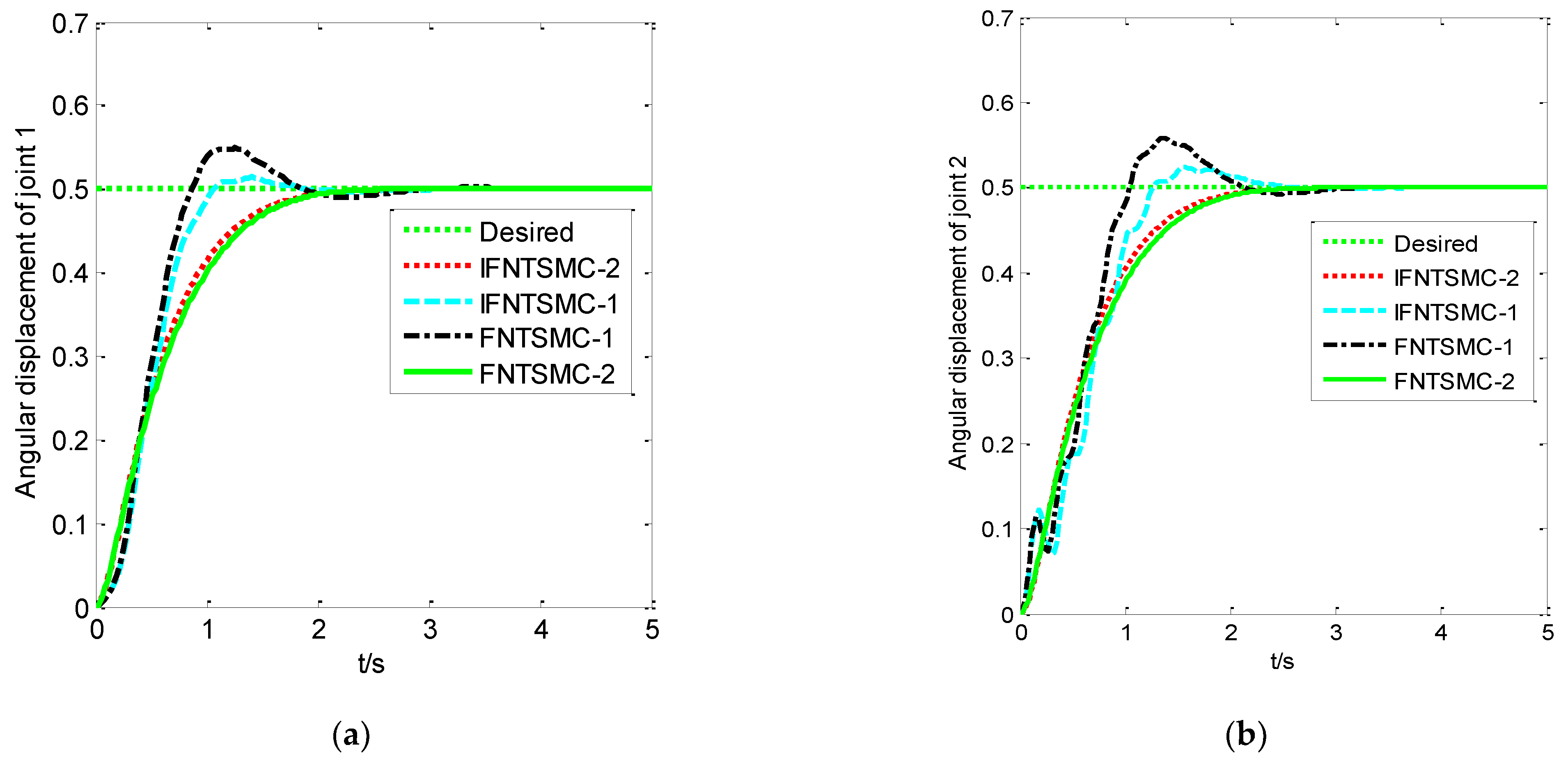
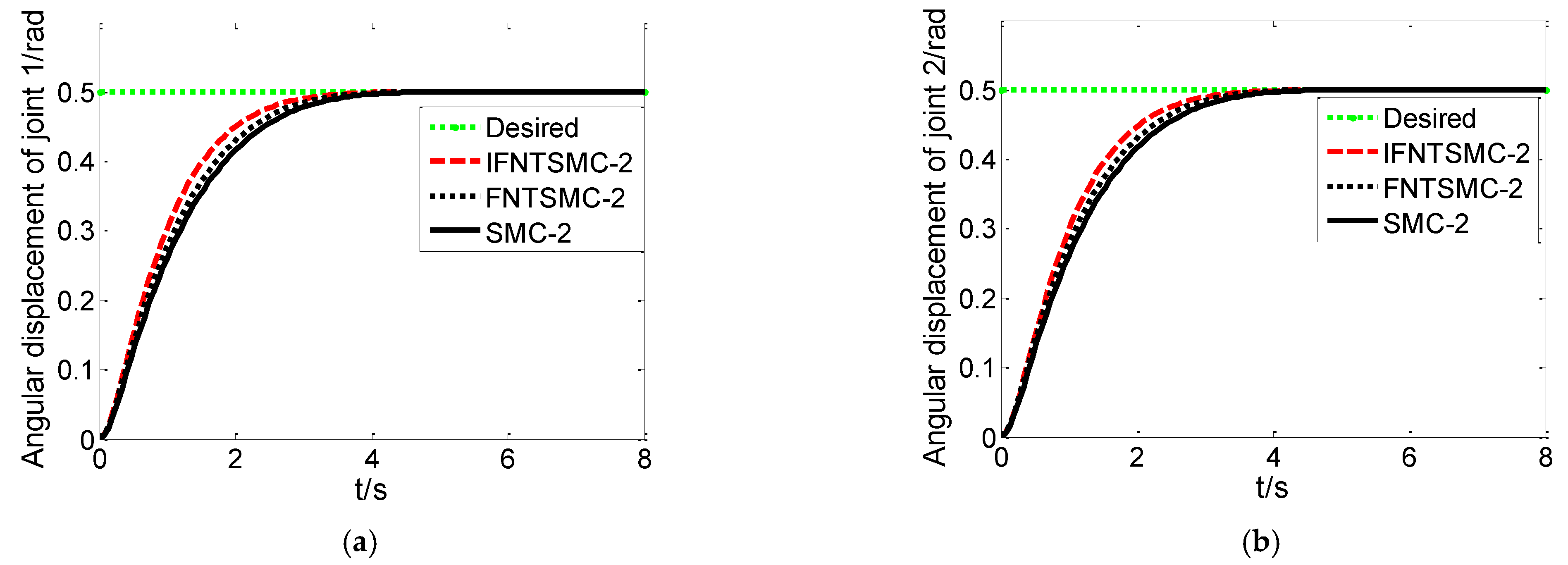
6. Simulation Analysis
7. Experimental Verification of the Fuzzy Non-Singular Terminal Sliding Mode Control for Low Dimensional Mode
7.1. Experimental Platform
7.2. Experimental Methods
7.3. Analysis of the Experimental Results
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhao, Z.; He, X.; Ahn, C.K. Boundary disturbance observer-based control of a vibrating single-link flexible manipulator. IEEE Trans. Syst. Man Cybern. 2021, 51, 2382–2390. [Google Scholar] [CrossRef]
- Shawky, A.; Zydek, D.; Elhalwagy, Y.Z. Modeling and nonlinear control of a flexible-link manipulator. Appl. Math. Model. 2013, 37, 9591–9602. [Google Scholar] [CrossRef]
- Yang, H.; Yu, Y.; Yuan, Y.; Fan, X. Back-stepping control of two-link flexible manipulator based on an extended state observer. Adv. Space Res. 2015, 56, 2312–2322. [Google Scholar] [CrossRef]
- Karagülle, H.; Malgaca, L.; Dirilmiş, M. Vibration control of a two-link flexible manipulator. J. Vib. Control. 2017, 23, 2023–2034. [Google Scholar] [CrossRef]
- Liang, D.; Song, Y.; Sun, T.; Jin, X. Rigid flexible coupling dynamic modeling and investigation of a redundantly actuated parallel manipulator with multiple actuation modes. J. Sound Vib. 2017, 403, 129–151. [Google Scholar] [CrossRef]
- Congqing, W.; Pengfei, W.; Xin, Z.; Xiwu, P. Composite sliding mode control for a free-floating space rigid flexible coupling manipulator system. Int. J. Adv. Rob. Syst. 2013, 10, 124. [Google Scholar] [CrossRef]
- Gharooni, S.; Heller, B.; Tokhi, M.O. A new hybrid spring brakeorthosis for controlling hip and knee flexion in the swing phase. IEEE Trans. Neural Syst. Rehabil. Eng. 2001, 9, 106–107. [Google Scholar] [CrossRef]
- Kumar, R.; Berkelman, P.; Gupta, P. Preliminary experiments in cooperative human/robot force control for robot assisted microsurgical manipulation. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings, San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 610–617. [Google Scholar]
- Ni, Z.; Liu, J.; Wu, Z. Identification of the state-space model and payload mass parameter of a flexible space manipulator using a recursive subspace tracking method. Chin. J. Aeronaut. 2019, 32, 513–530. [Google Scholar] [CrossRef]
- Meng, D.; Wang, X.; Xu, W. Space robots with flexible appendages: Dynamic modeling, coupling measurement, and vibration suppression. J. Sound Vib. 2017, 396, 30–50. [Google Scholar] [CrossRef]
- Li, Z.; Li, G.; Wu, X.; Kan, Z.; Su, H.; Liu, Y. Asymmetric Cooperation Control of Dual-Arm Exoskeletons Using Human Collaborative Manipulation Models. IEEE Trans. Cybern. 2021, 34, 264–271. [Google Scholar] [CrossRef]
- Su, H.; Qi, W.; Hu, Y.; Karimi, H.R.; Ferrigno, G.; Momi, E. An Incremental Learning Framework for Human-like Redundancy Optimization of Anthropomorphic Manipulators. IEEE Trans. Ind. Inf. 2020, 18, 1864–1872. [Google Scholar] [CrossRef]
- Su, H.; Qi, W.; Yang, C.; Sandoval, J.; Ferrigno, G.; De Momi, E. Deep Neural Network Approach in Robot Tool Dynamics Identification for Bilateral Teleoperation. IEEE Robot. Autom. Lett. 2020, 5, 2943–2949. [Google Scholar] [CrossRef]
- Su, H.; Schmirander, Y.; Li, Z.; Zhou, X.; Ferrigno, G.; De Momi, E. Bilateral Teleoperation Control of a Redundant Manipulator with an RCM Kinematic Constraint. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation, Paris, France, 17–21 May 2020; pp. 1–8. [Google Scholar]
- Ovur, S.E.; Zhou, X.; Qi, W.; Zhang, L.; Hu, Y.; Su, H.; Ferrigno, G.; De Momi, E. A novel autonomous learning framework to enhance sEMG-based hand gesture recognition using depth information. Biomed. Signal Process. Control 2021, 66, 102444. [Google Scholar] [CrossRef]
- Zhou, X.; Qi, W.; Ovur, S.E.; Zhang, L.; Hu, Y.; Su, H.; De Momi, E. A novel muscle-computer interface for hand gesture recognition using depth vision. J. Amb. Intel. Hum. Comp. 2020, 11, 5569–5580. [Google Scholar] [CrossRef]
- Hernández-Guzmán, V.M.; Antonio-Cruz, M.; Silva-Ortigoza, R. Linear state feedback regulation of a furuta pendulum: Design based on differential flatness and root locus. IEEE Access 2016, 4, 8721–8736. [Google Scholar] [CrossRef]
- Dwivedi, P.; Pandey, S.; Junghare, A.S. Stabilization of unstable equilibrium point of rotary inverted pendulum using fractional controller. J. Franklin Inst. 2017, 354, 7732–7766. [Google Scholar] [CrossRef]
- Yang, X.; Zheng, X. Swing-up and stabilization control design for an underactuated rotary inverted pendulum system: Theory and experiments. IEEE Trans. Ind. Electron. 2018, 65, 7229–7238. [Google Scholar] [CrossRef]
- Horibe, T.; Sakamoto, N. Optimal swing up and stabilization control for inverted pendulum via stable manifold method. IEEE Trans. Control Syst. Technol. 2017, 26, 708–715. [Google Scholar] [CrossRef]
- Gritli, H.; Belghith, S. Robust feedback control of the underactuated inertia wheel inverted pendulum under parametric uncertainties and subject to external disturbances: LMI formulation. J. Franklin Inst. 2018, 355, 9150–9191. [Google Scholar] [CrossRef]
- Chen, Y.F.; Huang, A.C. Adaptive control of rotary inverted pendulum system with time-varying uncertainties. Nonlinear Dyn. 2014, 76, 95–102. [Google Scholar] [CrossRef]
- Cui, R.; Guo, J.; Mao, Z. Adaptive backstepping control of wheeled inverted pendulums models. Nonlinear Dyn. 2015, 79, 501–511. [Google Scholar] [CrossRef]
- Huang, J.; Ri, M.; Wu, D.; Ri, S. Interval type-2 fuzzy logic modeling and control of a mobile two-wheeled inverted pendulum. IEEE Trans. Fuzzy Syst. 2017, 26, 2030–2038. [Google Scholar] [CrossRef]
- Su, X.; Xia, F.; Liu, J.; Wu, L. Event-triggered fuzzy control of nonlinear systems with its application to inverted pendulum systems. Automatica 2018, 94, 236–248. [Google Scholar] [CrossRef]
- Coban, R.; Ata, B. Decoupled sliding mode control of an inverted pendulum on a cart: An experimental study. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics. Mechatronics, Sheraton Arabella Park Hotel, Munich, Germany, 3–7 July 2017; pp. 993–997. [Google Scholar]
- Wadi, A.; Lee, J.H.; Romdhane, L. Nonlinear sliding mode control of the Furuta pendulum. In Proceedings of the 2018 11th International Symposium on Mechatronics and Its Applications, Sharjah, United Arab Emirates, 3–4 March 2018; pp. 1–5. [Google Scholar]
- Elsayed, B.A.; Hassan, M.A.; Mekhilef, S. Fuzzy swinging-up with sliding mode control for third order cart-inverted pendulum system. Int. J. Control Autom. Syst. 2015, 13, 238–248. [Google Scholar] [CrossRef]
- Mehedi, I.M.; Ansari, U.; Bajodah, A.H.; AL-Saggaf, U.M.; Kada, B.; Rawa, M.J. Underactuated rotary inverted pendulum control using robust generalized dynamic inversion. J. Vib. Control. 2020, 26, 1–11. [Google Scholar] [CrossRef]
- Zhou, X.; He, J.; Chen, D.; Li, J.; Jiang, C.; Ji, M.; He, M. Human-robot skills transfer interface for UAV-based precision pesticide in dynamic environments. Assem. Autom. 2021, 41, 345–357. [Google Scholar] [CrossRef]
- Wen, C.; Jiang, J.; Yu, C.; Zhu, P. Superhelical Sliding Mode Adaptive Control for Hypersonic Vehicle. Electron. Opt. Control 2020, 27, 1–5. [Google Scholar]
- Yang, J.; Ren, Y. Application of fractional order Composite Control in Optoelectronic Stabilized Platform. Electron. Opt. Control 2020, 27, 73–78. [Google Scholar]
- Jing, L.; Deng, Y.; Li, H. High precision optoelectronic tracking and capture based on Cascaded Sliding Mode Control. Opt. Precis. Eng. 2020, 28, 350–362. [Google Scholar]
- Phuah, J.S.; Lu, J.M.; Yahagi, T. Chattering Free Sliding Mode Control in Magnetic Levitation System. IEEE Trans. Electron. Inf. Sys. 2005, 125, 600–606. [Google Scholar] [CrossRef][Green Version]
- Chen, M.S.; Hwang, Y.R.; Tomizuka, M. A State-Dependent Boundary Layer Design for Sliding Mode Control. IEEE Trans. Autom. Control 2002, 47, 1677–1681. [Google Scholar] [CrossRef]
- Vicente, P.V.; Gerd, H. Chattering-Free Sliding Mode Control for a Class of Nonlinear Mechanical Systems. Int. J. Robust Nonlinear Control 2001, 7, 1161–1178. [Google Scholar]
- Utkin, V.I.; Young, K.D. Methods Multidimensional Variable Structure for Constructing Discontinuity Plans in Systems. Autom. Remote Control 1979, 13, 1466–1470. [Google Scholar]
- Levant, A. Homogeneity Approach to High-Order Sliding Mode Design. Automatica 2005, 41, 823–830. [Google Scholar] [CrossRef]
- Levant, A. Principles of 2-Sliding Mode Design. Automatica 2007, 43, 576–586. [Google Scholar] [CrossRef]
- Levant, A. Quasi-Continuous High-Order Sliding-Mode Controllers. IEEE Trans. Autom. Control 2005, 50, 1812–1816. [Google Scholar] [CrossRef]
- Levant, A. High Order Sliding Modes and Arbitrary Order Exact Robust Differentiation. In Proceedings of the European Control Conference, Arlington, VA, USA, 25–27 June 2001; pp. 996–1001. [Google Scholar]
- Bartolini, G.; Punta, E.; Zolezzi, T. Approximation Properties for Second-Order Sliding Mode Control Systems. IEEE Trans. Autom. 2007, 52, 1813–1825. [Google Scholar] [CrossRef]
- Chiacchiarini, H.G.; Desages, A.C. Variable Structure Control with a Second-Order Sliding Condition: Application to a Steam Generator. Automatica 1995, 131, 1157–1168. [Google Scholar] [CrossRef]
- Jiang, K.; Zhang, J.; Chen, Z. A New Approach for the Sliding Mode Control Fuzzy Reaching Law. In Proceedings of the 4th Word Congress on Intelligent Control and Automation, New York, NY, USA, 10–14 June 2002; pp. 656–660. [Google Scholar]
- Kawamura, A.; Itoh, H.; Sakamoto, K. Chattering reduction of disturbance observer based sliding mode control. IEEE Trans. Ind. Appl. 1994, 30, 456–461. [Google Scholar] [CrossRef]
- Zhao, H.; Hu, Y. Dynamic Sliding Mode Control and Its Application to Mobile Robot Output Tracking. Control Decis. 2001, 16, 565–568. [Google Scholar]
- Huang, J.; Zhou, D. Parameter Tuning of Sliding Mode Control Based on Improved Differential Evolution Algorithm. Control Eng. 2018, 25, 484–487. [Google Scholar]
- Chen, Z.; Meng, W.; Zhang, J. Sliding Mode Control Scheme Based on Improved Particle Swarm Optimization algorithm. Syst. Eng. Theory Pract. 2009, 29, 137–141. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, J.; Liu, C. Neural Sliding Mode Control of Discrete Chaotic Systems Based on Improved Particle Swarm Optimization Algorithm. Control. Decis. 2013, 7, 1094–1098. [Google Scholar]
- Qi, L.; Lu, J. Research on Improved SVM Sliding Mode Control Based on Particle Swarm Optimization algorithm. Comput. Meas. Control 2014, 22, 3230–3232. [Google Scholar]
- Fridman, L.; Levant, A. Higher order sliding modes. In Sliding Mode Control in Engineering; Taylor & Francis Group: Oxfordshire, UK, 2002; pp. 53–102. [Google Scholar]
- Joe, H.; Kim, M.; Yu, S.C. Second-order sliding-mode controller for autonomous underwater vehicle in the presence of unknown disturbances. Nonlinear Dyn. 2014, 78, 183–196. [Google Scholar] [CrossRef]
- Levant, A. Sliding order and sliding accuracy in sliding mode control. Int. J. Control 1993, 58, 1247–1263. [Google Scholar] [CrossRef]
- Yang, J.; Su, J.; Li, S.; Yu, X. High-order mismatched disturbance compensation for motion control systems via a continuous dynamic sliding-mode approach. IEEE Trans. Ind. Inform. 2014, 10, 604–614. [Google Scholar] [CrossRef]
- Bartolini, G.; Pisano, A.; Punta, E.; Usai, E. A surveyof applications of second-order sliding mode control tomechanical systems. Int. J. Control 2003, 76, 875–892. [Google Scholar] [CrossRef]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Springer: New York, NY, USA, 2014; Volume 89, pp. 1743–1746. [Google Scholar]
- Feng, Y.; Bao, C.; Yu, X. Design method of non-singular terminal sliding mode control system. Control Decis. 2002, 17, 194–198. [Google Scholar]
- Yu, Y.; Wu, Z. Global Stabilization of Nonlinear Dynamical Systems Variable Structure Systems, Sliding Mode and Nonlinear Control. Control Inf. Sci. 1999, 247, 109–122. [Google Scholar]
- Su, H.; Qi, W.; Chen, J.; Zhang, D. Fuzzy Approximation-based Task-Space Control of Robot Manipulators with Remote Center of Motion Constraint. IEEE Trans. Fuzzy Syst. 2022, 1–11. [Google Scholar] [CrossRef]
- Pan, Y.; Deng, H. Model Reduction of a Two-link Rigid-Flexible Manipulators Based on Spectral Approximation Method. Adv. Mat. Res. 2011, 383, 2654–2660. [Google Scholar] [CrossRef]
- Moallem, M.; Patel, R.V.; Khorasani, K. Nonlinear tip-position tracking control of a flexible-link manipulator: Theory and experiments. Automatica 2001, 37, 1825–1834. [Google Scholar] [CrossRef]
- Pan, Y. Research on Dimension Reduction and Control of Rigid Flexible Manipulator Model Based on Spectrum Method; Changsha Evening Newspaper Group: Changsha, China, 2011. [Google Scholar]
- Pedro, J.O.; Tshabalala, T. Hybrid NNMPC/PID control of a two-link flexible manipulator with actuator dynamics. In Proceedings of the 2015 10th Asian Control Conference, New York, NY, USA, 31 May–3 June 2015; pp. 1–6. [Google Scholar]
- Lane, J.S.; Dickerson, S.L. Contribution of Passive Damping to the Control of Flexible Manipulator. In Proceedings of the Inter–national Computers in Engineering Conference, Chicago, IL, USA, 7–11 August 1984; pp. 175–180. [Google Scholar]
- Xu, L.; Deng, H.; Lin, C.; Zhang, Y. Approximate Inertial Manifold-Based Model Reduction and Vibration Suppression for Rigid-Flexible Mechanical Arms. Complexity 2021, 2021, 1–17. [Google Scholar] [CrossRef]
- Alazki, H.; Ordaz, P.; Poznyak, A. Robust Bounded Control for the Flexible Arm Robot. In Proceedings of the 52nd IEEE Conference on Decision and Control, Florence, Italy, 10–13 December 2013; pp. 3061–3066. [Google Scholar]
- Pelez, G.; Pelaez, G.; Perez, J.M.; Vizn, A.; Bautista, E. Input shaping reference commands for trajectory following cartesian machines. Control Eng. Pract. 2005, 13, 941–958. [Google Scholar] [CrossRef]
- Li, R.; Yang, B.; He, J.; Chen, L. Sensorless Control of PMSM Based on Variable Universe Fuzzy PI. Electr. Mach. Control. Appl. 2021, 48, 29–34. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| s | NB | NM | NS | ZO | PS | PM | PB | |
|---|---|---|---|---|---|---|---|---|
| s | ||||||||
| PB | ZO | PS | PM | PB | PB | PB | PB | |
| PM | NS | ZO | PS | PM | PB | PB | PB | |
| PS | NM | NS | ZO | PS | PM | PB | PB | |
| ZO | NB | NM | NS | ZO | PS | PM | PB | |
| NS | NB | NB | NM | NS | ZO | PS | PM | |
| NM | NB | NB | NB | NM | NS | ZO | PS | |
| NB | NB | NB | NB | NB | NM | NS | ZO | |
| Test Scope | Accuracy | Open Circuit Voltage | Basic Dimensions | Range |
|---|---|---|---|---|
| Model of Motor | MSMD5AZG1V | MSMD5AZG1U |
|---|---|---|
| Rated power (W) | 50 | 50 |
| Rated speed (rpm) | 3000 | 3000 |
| Maximum speed (rpm) | 5000 | 5000 |
| Rated torque (Nm) | 0.16 | 0.16 |
| Maximum torque (Nm) | 0.48 | 0.48 |
| Rated line current (A) | 1.1 | 1.1 |
| Rotor inertia (×10−4 kg m2) | 0.027 | 0.025 |
| Method | Joint 2 Response Improvement | Reduction in End Vibration |
|---|---|---|
| IFNTSMC-2 compared with SMC-2 | 25.1% | 30.5% |
| FNTSMC-2 compared with SMC-2 | 13.6% | 19.1% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, L.; Qian, X.; Hu, R.; Zhang, Y.; Deng, H. Low-Dimensional-Approximate Model Based Improved Fuzzy Non-Singular Terminal Sliding Mode Control for Rigid-Flexible Manipulators. Electronics 2022, 11, 1263. https://doi.org/10.3390/electronics11081263
Xu L, Qian X, Hu R, Zhang Y, Deng H. Low-Dimensional-Approximate Model Based Improved Fuzzy Non-Singular Terminal Sliding Mode Control for Rigid-Flexible Manipulators. Electronics. 2022; 11(8):1263. https://doi.org/10.3390/electronics11081263
Chicago/Turabian StyleXu, Lisha, Xiaoshan Qian, Rong Hu, Yi Zhang, and Hua Deng. 2022. "Low-Dimensional-Approximate Model Based Improved Fuzzy Non-Singular Terminal Sliding Mode Control for Rigid-Flexible Manipulators" Electronics 11, no. 8: 1263. https://doi.org/10.3390/electronics11081263
APA StyleXu, L., Qian, X., Hu, R., Zhang, Y., & Deng, H. (2022). Low-Dimensional-Approximate Model Based Improved Fuzzy Non-Singular Terminal Sliding Mode Control for Rigid-Flexible Manipulators. Electronics, 11(8), 1263. https://doi.org/10.3390/electronics11081263