
CMOS Interface Circuits for High-Voltage Automotive Signals




Abstract
:1. Introduction
2. Automotive Signals and Readout Circuits
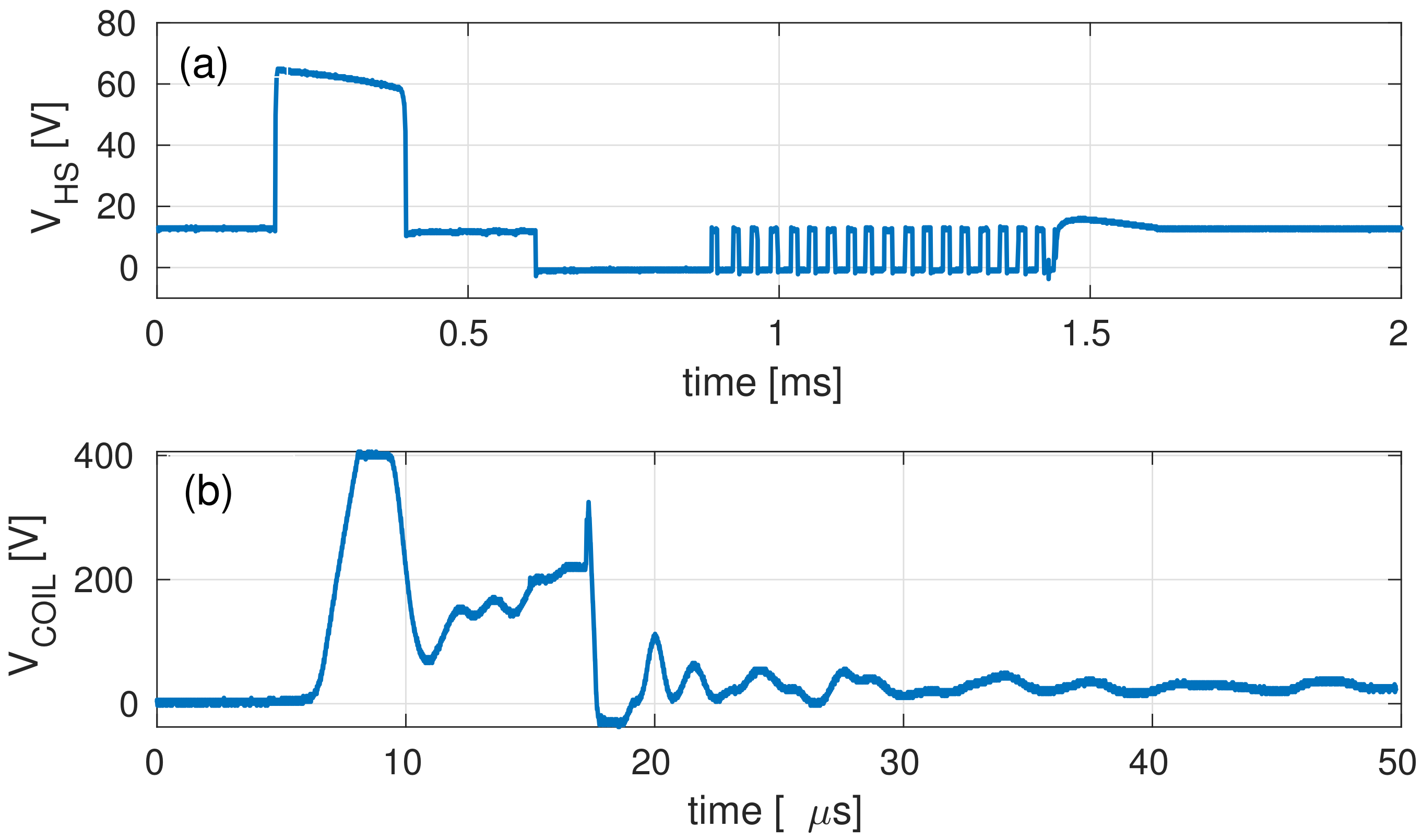
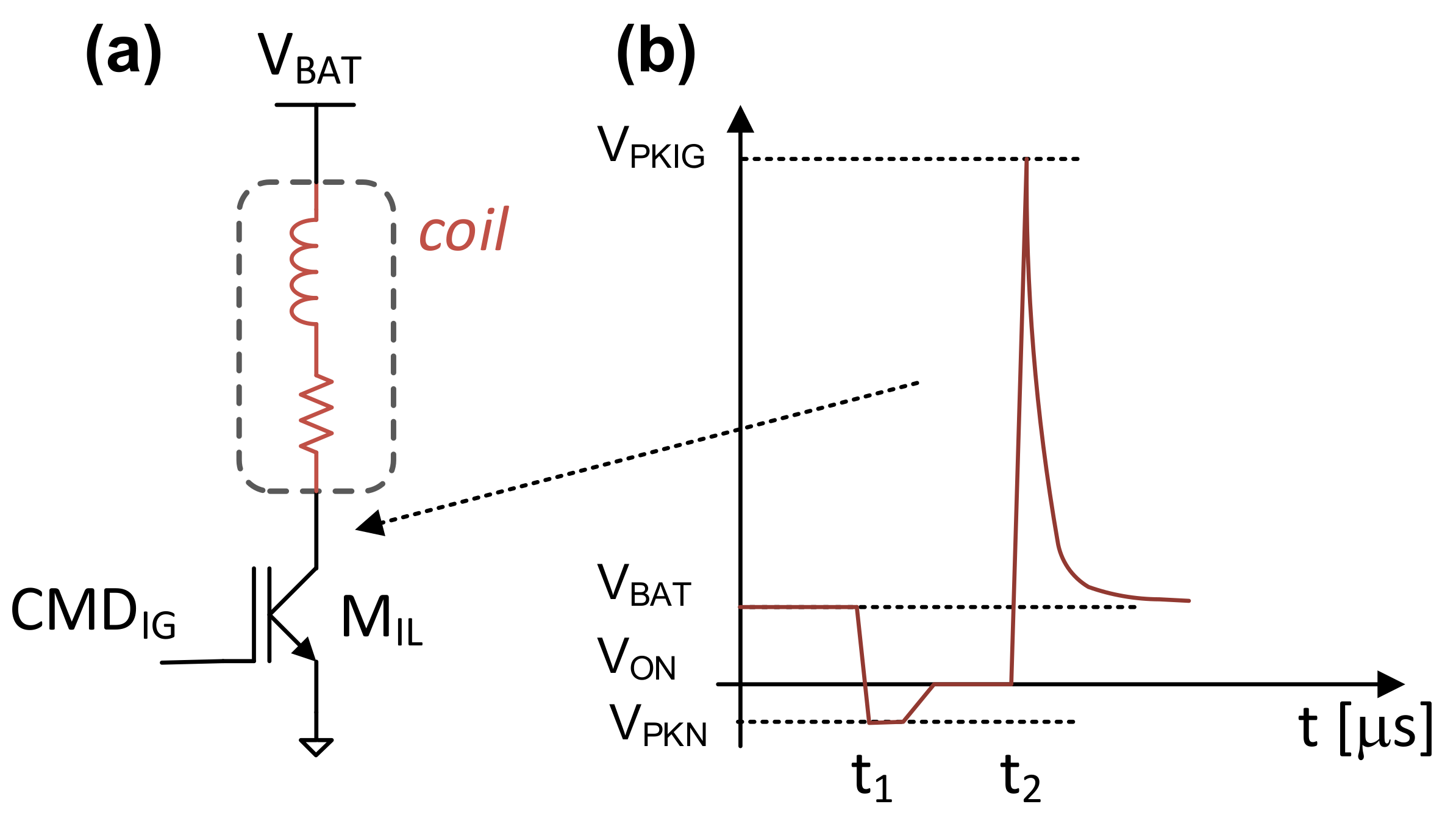
2.1. Injector and Igniter Signals
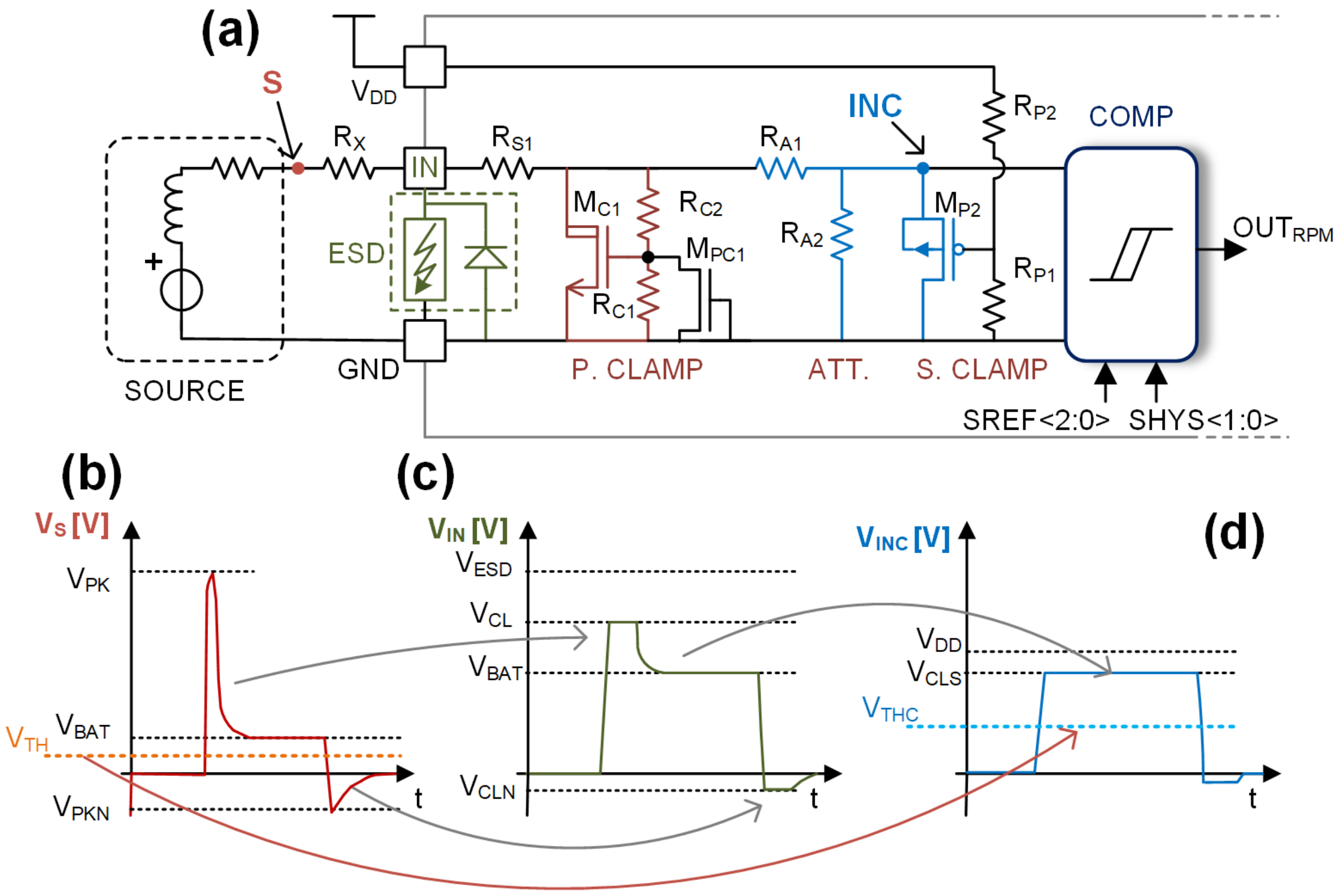
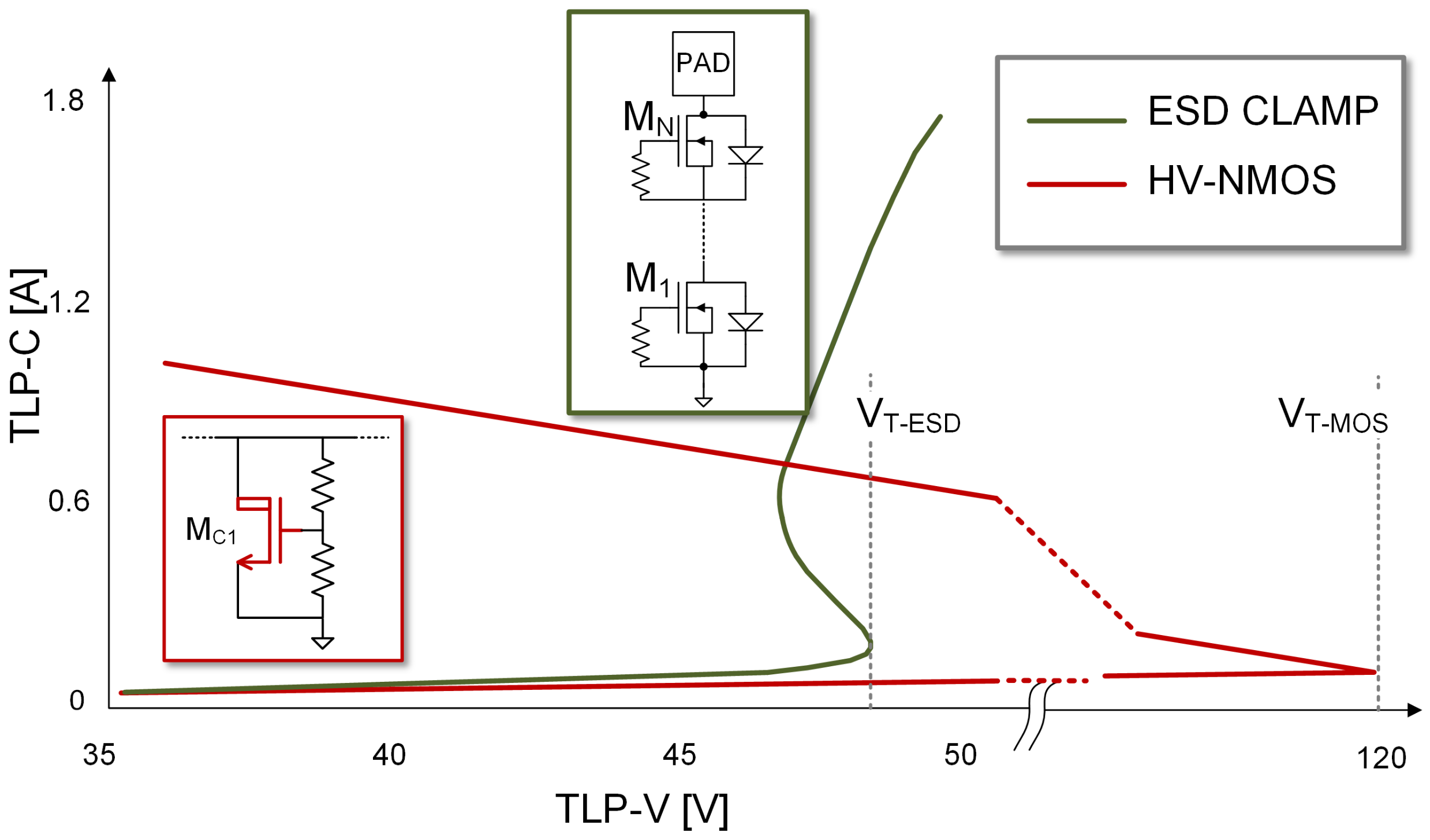
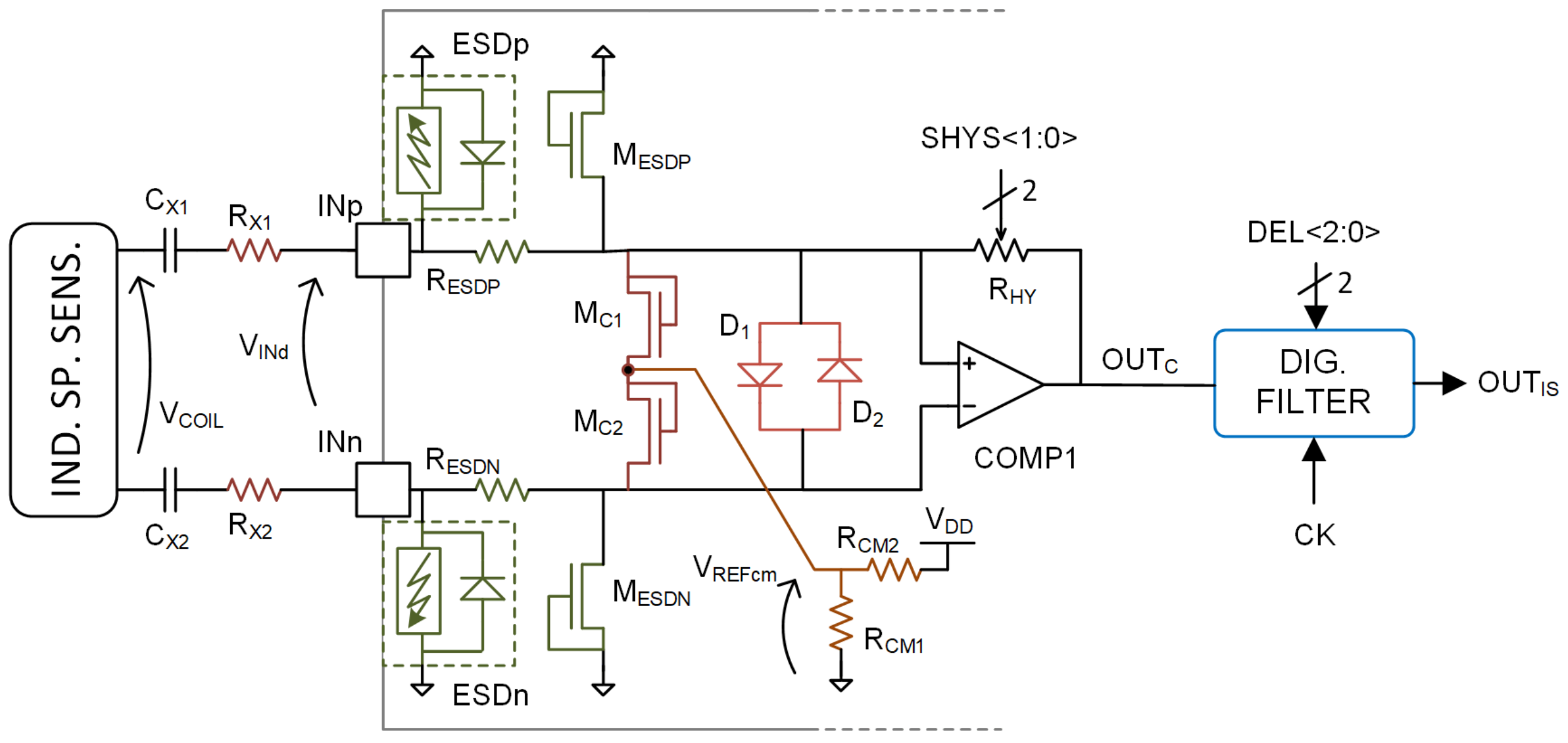
2.2. Integrated Interface Circuit with Multi-Level Voltage Clamping
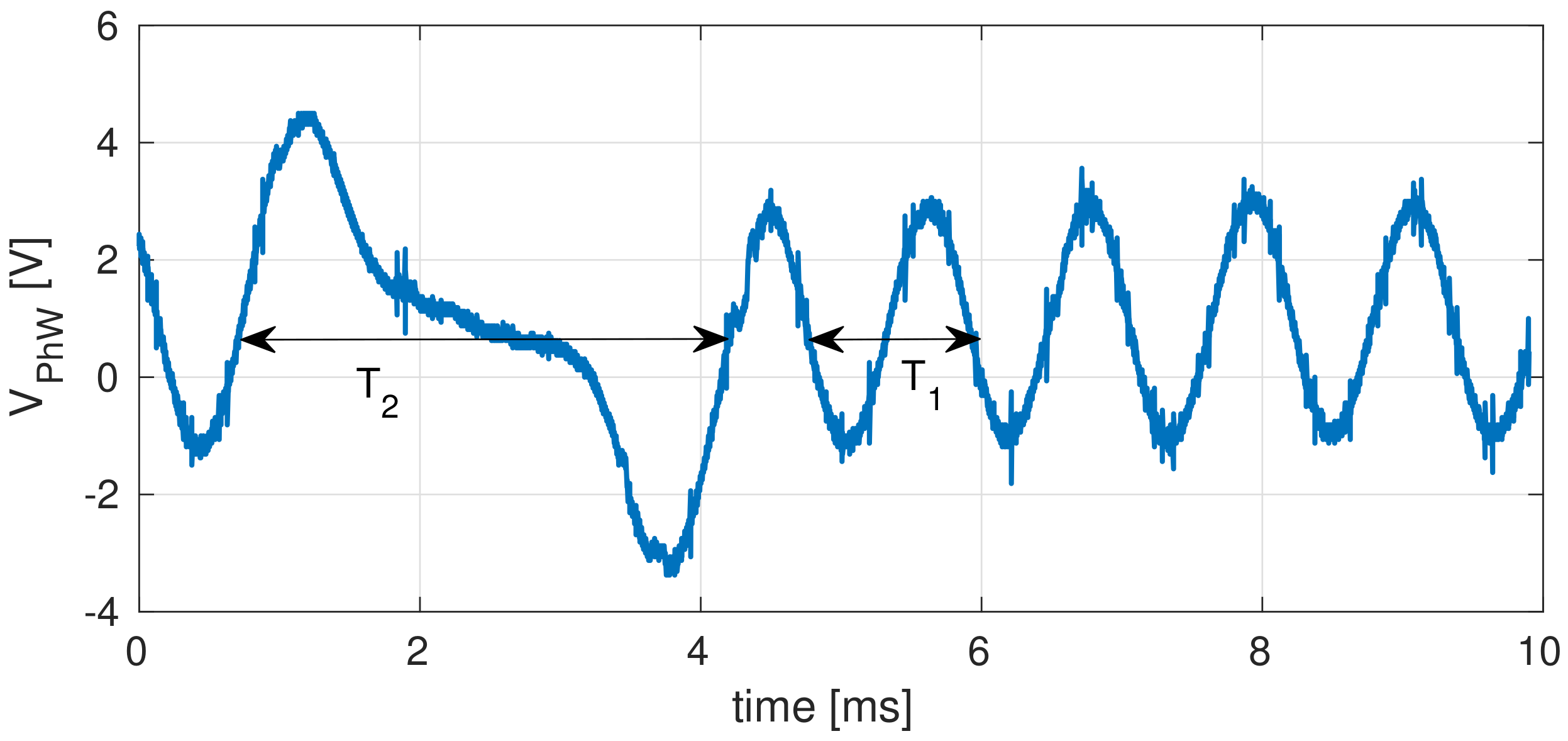
2.3. Inductive Phonic-Wheel Sensor
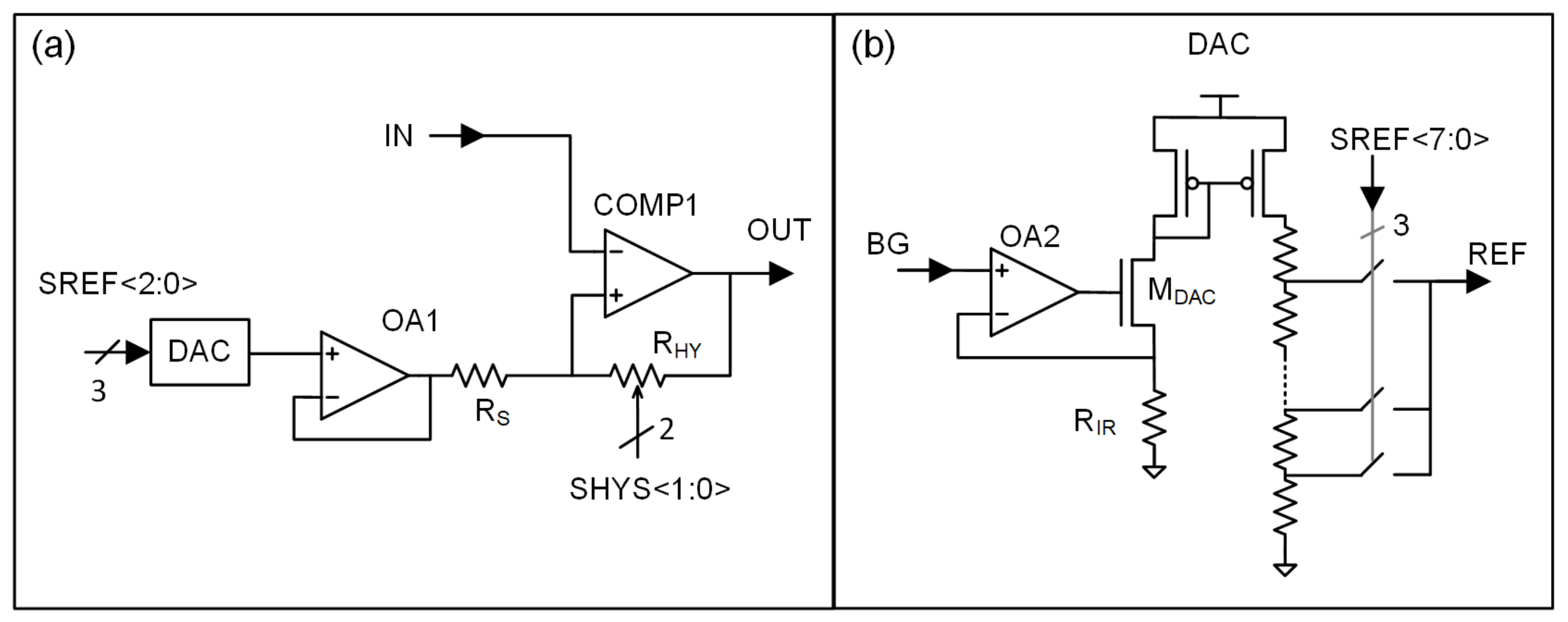
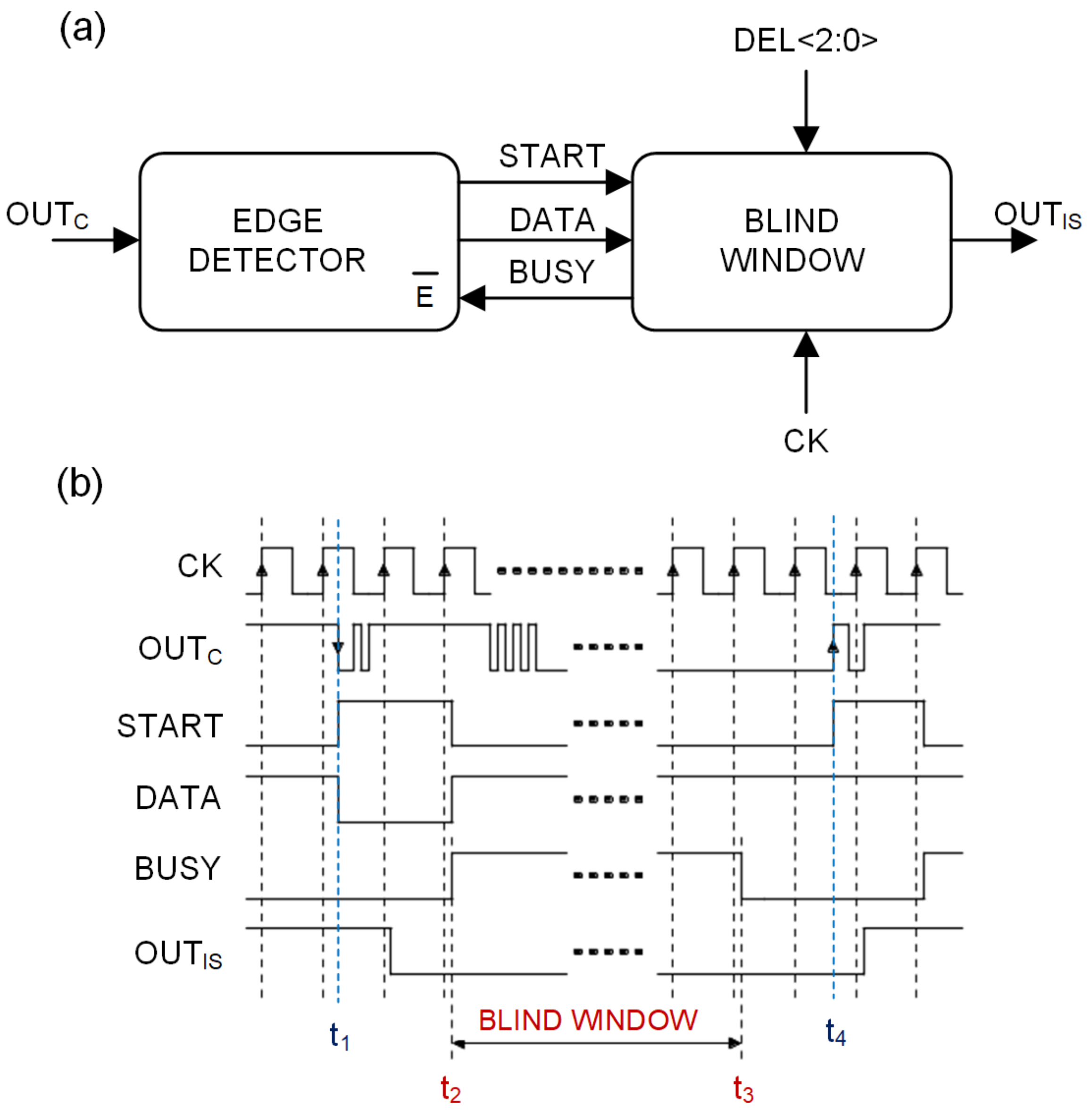
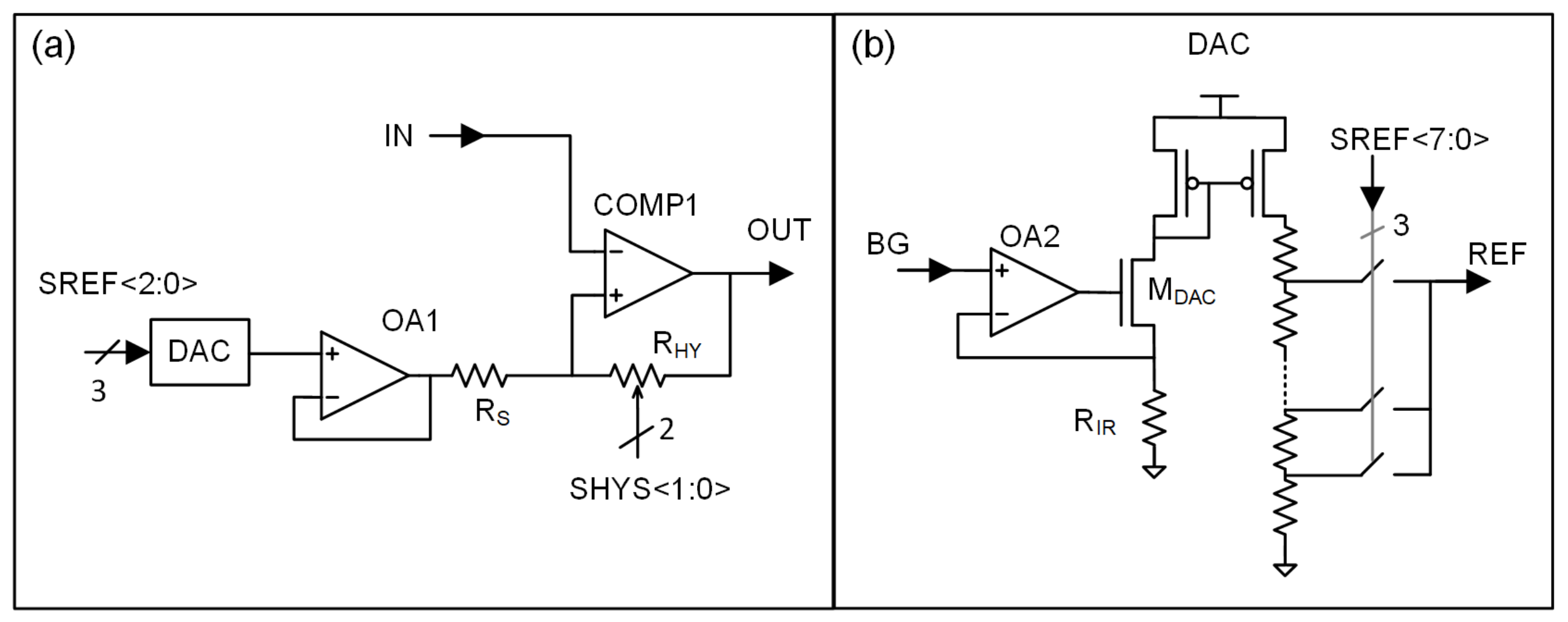
2.4. Conversion and Processing Circuits
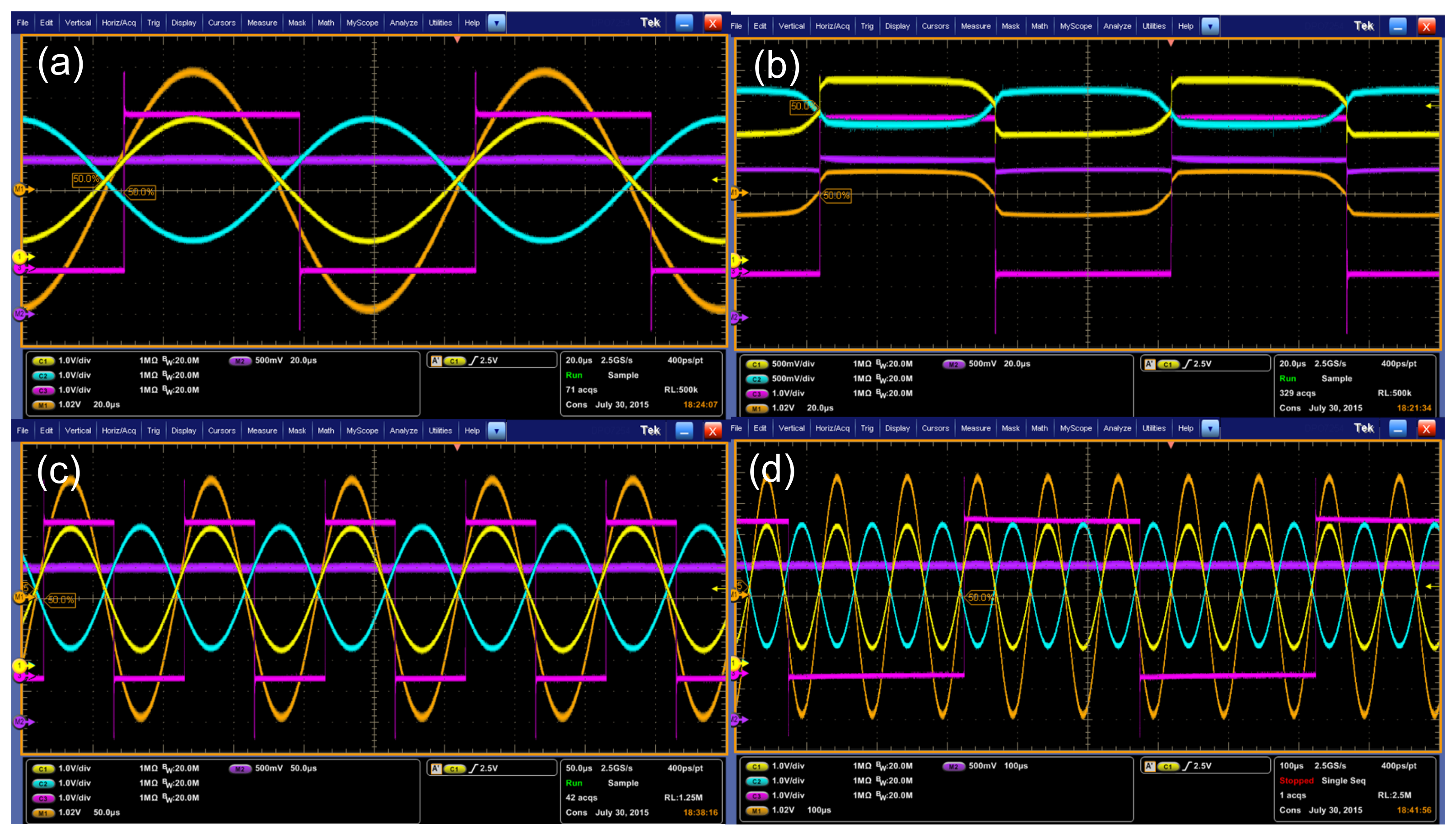
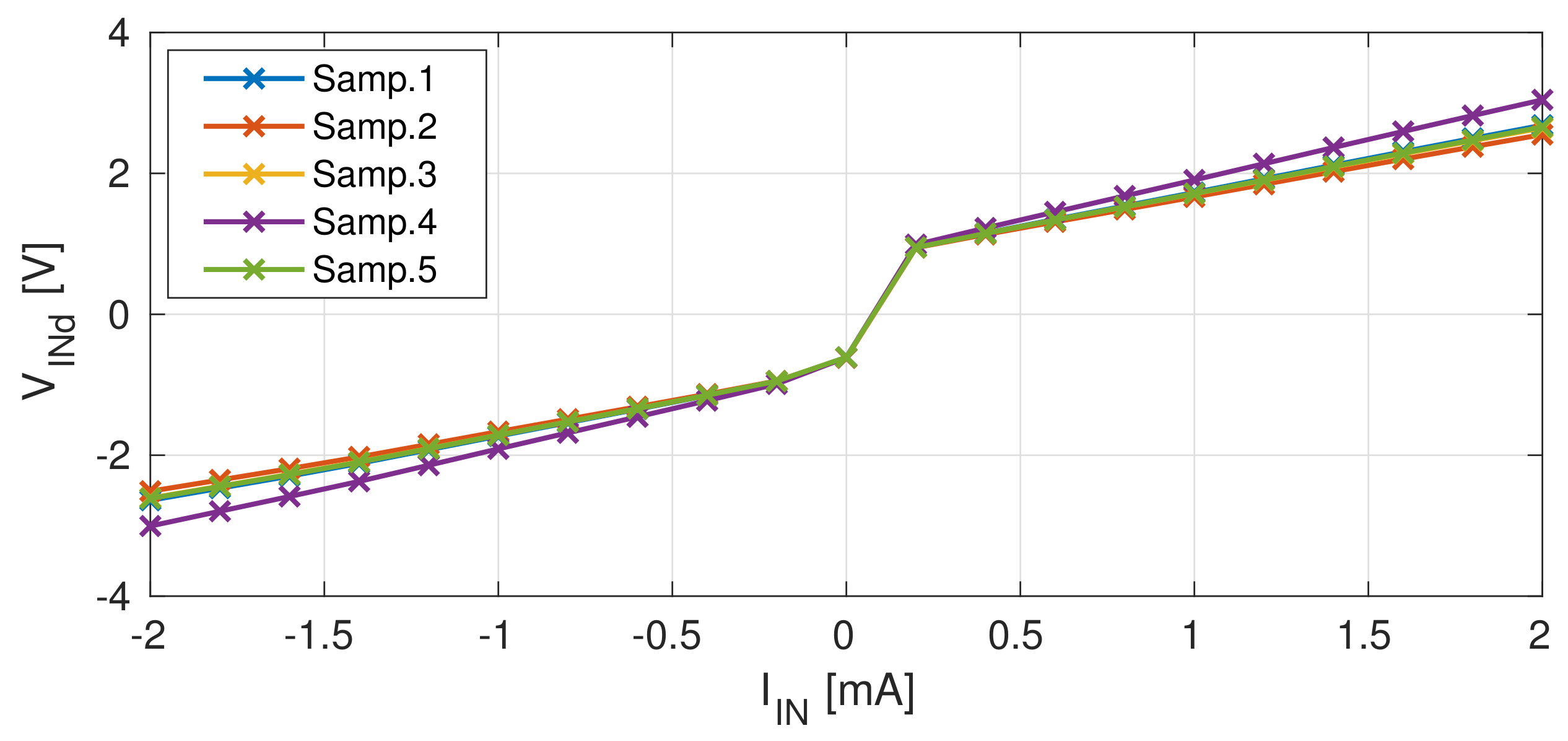
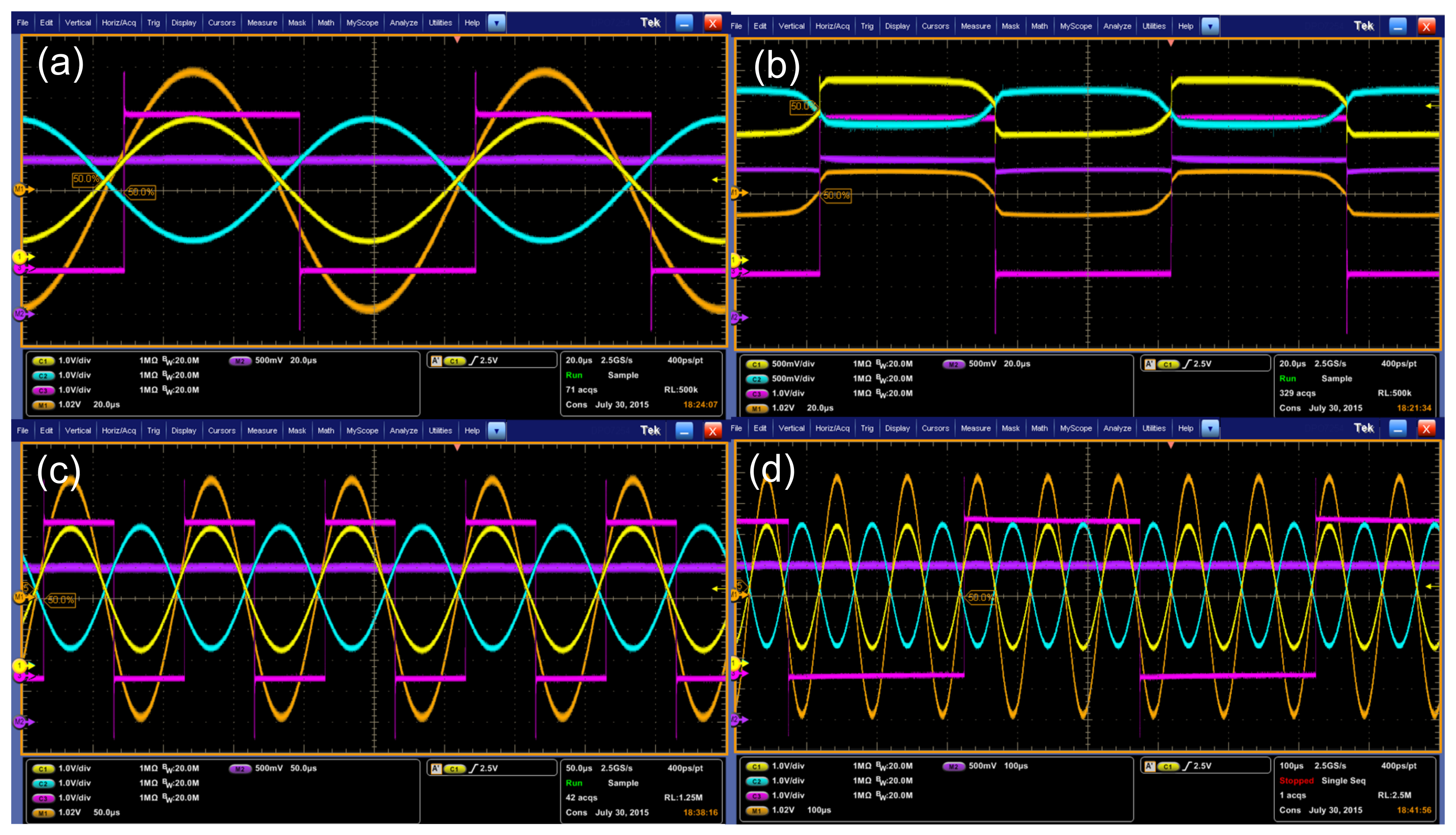
3. Experimental Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Karthic, S.; Senthil Kumar, M. Experimental investigations on hydrogen biofueled reactivity controlled compression ignition engine using open ECU. Energy 2021, 229, 120787. [Google Scholar] [CrossRef]
- Kong, F.; Zhang, L.; Zeng, J.; Zhang, Y. Automatic Measurement and Control System for Vehicle ECU Based on CAN Bus. In Proceedings of the 2007 IEEE International Conference on Automation and Logistics, Jinan, China, 18–21 August 2007; pp. 964–968. [Google Scholar] [CrossRef]
- Electronic Engine Control Unit. Available online: https://www.bosch-mobility-solutions.com/en/solutions/control-units/eengine-control-unit/ (accessed on 3 February 2022).
- Garrard, M.; Gao, L.; Leiss, K.; Gryska, H. MPC563xM-Based Cost Effective ECU Chipset. NXP. Available online: https://www.nxp.com/docs/en/application-note/AN4454.pdf (accessed on 20 February 2022).
- Adiyasa, I.W.; Firmansyah, E.; Cahyadi, A.I.; Kautsar, A. Design of Simple ECU for LPG Fuel Injection on Conventional Generator Set. In Proceedings of the 2018 4th International Conference on Science and Technology (ICST), Yogyakarta, Indonesia, 7–8 August 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Navale, S.J.; Kulkarni, R.R.; Thipse, S.S. An experimental study on performance, emission and combustion parameters of hydrogen fueled spark ignition engine with the timed manifold injection system. Int. J. Hydrogen Energy 2017, 42, 8299–8309. [Google Scholar] [CrossRef] [Green Version]
- Sopena, C.; Diéguez, P.; Sáinz, D.; Urroz, J.; Guelbenzu, E.; Gandía, L. Conversion of a commercial spark ignition engine to run on hydrogen: Performance comparison using hydrogen and gasoline. Int. J. Hydrogen Energy 2010, 35, 1420–1429. [Google Scholar] [CrossRef]
- Rimkus, A.; Stravinskas, S.; Matijošius, J. Comparative Study on the Energetic and Ecologic Parameters of Dual Fuels (Diesel–NG and HVO–Biogas) and Conventional Diesel Fuel in a CI Engine. Appl. Sci. 2020, 10, 359. [Google Scholar] [CrossRef] [Green Version]
- Hernandez, N.M.; Villanueva, E.P. Production, purification and utilization of biogas as fuel for internal combustion engine. AIP Conf. Proc. 2018, 1941, 020009. [Google Scholar] [CrossRef]
- Korakianitis, T.; Namasivayam, A.; Crookes, R. Natural-gas fueled spark-ignition (SI) and compression-ignition (CI) engine performance and emissions. Prog. Energy Combust. Sci. 2011, 37, 89–112. [Google Scholar] [CrossRef]
- Marmiroli, B.; Venditti, M.; Dotelli, G.; Spessa, E. The transport of goods in the urban environment: A comparative life cycle assessment of electric, compressed natural gas and diesel light-duty vehicles. Appl. Energy 2020, 260, 114236. [Google Scholar] [CrossRef]
- He, X.; Wallington, T.J.; Anderson, J.E.; Keoleian, G.A.; Shen, W.; De Kleine, R.; Kim, H.C.; Winkler, S. Life-Cycle Greenhouse Gas Emission Benefits of Natural Gas Vehicles. ACS Sustain. Chem. Eng. 2021, 9, 7813–7823. [Google Scholar] [CrossRef]
- Wilberforce, T.; El-Hassan, Z.; Khatib, F.; Al Makky, A.; Baroutaji, A.; Carton, J.G.; Olabi, A.G. Developments of electric cars and fuel cell hydrogen electric cars. Int. J. Hydrogen Energy 2017, 42, 25695–25734. [Google Scholar] [CrossRef] [Green Version]
- Manoharan, Y.; Hosseini, S.E.; Butler, B.; Alzhahrani, H.; Senior, B.T.F.; Ashuri, T.; Krohn, J. Hydrogen Fuel Cell Vehicles; Current Status and Future Prospect. Appl. Sci. 2019, 9, 2296. [Google Scholar] [CrossRef] [Green Version]
- Fayaz, H.; Saidur, R.; Razali, N.; Anuar, F.; Saleman, A.; Islam, M. An overview of hydrogen as a vehicle fuel. Renew. Sustain. Energy Rev. 2012, 16, 5511–5528. [Google Scholar] [CrossRef]
- Shadidi, B.; Najafi, G.; Yusaf, T. A Review of Hydrogen as a Fuel in Internal Combustion Engines. Energies 2021, 14, 6209. [Google Scholar] [CrossRef]
- Sáinz, D.; Diéguez, P.; Sopena, C.; Urroz, J.; Gandía, L. Conversion of a commercial gasoline vehicle to run bi-fuel (hydrogen-gasoline). Int. J. Hydrogen Energy 2012, 37, 1781–1789. [Google Scholar] [CrossRef]
- Thurnheer, T.; Soltic, P.; Dimopoulos Eggenschwiler, P. SI engine fuelled with gasoline, methane and methane/hydrogen blends: Heat release and loss analysis. Int. J. Hydrogen Energy 2009, 34, 2494–2503. [Google Scholar] [CrossRef]
- Firmansyah, A.; Aziz, A.R.; Heikal, M.R.; Zainal A., E.Z. Diesel/CNG Mixture Autoignition Control Using Fuel Composition and Injection Gap. Energies 2017, 10, 1639. [Google Scholar] [CrossRef] [Green Version]
- Karagöz, Y.; Sadeghi, M.M. Electronic control unit development and emissions evaluation for hydrogen–diesel dual-fuel engines. Adv. Mech. Eng. 2018, 10, 1687814018814076. [Google Scholar] [CrossRef]
- Farooqi, Q.R.; Snyder, B.; Anwar, S. Real Time Monitoring of Diesel Engine Injector Waveforms for Accurate Fuel Metering and Control. J. Control Sci. Eng. 2013, 2013, 973141. [Google Scholar] [CrossRef] [Green Version]
- Erkuş, B.; Sürmen, A.; İhsan Karamangil, M. A comparative study of carburation and injection fuel supply methods in an LPG-fuelled SI engine. Fuel 2013, 107, 511–517. [Google Scholar] [CrossRef]
- Zhang, X.; Palazzolo, A.; Kweon, C.B.; Thomas, E.; Tucker, R.; Kascak, A. Direct Fuel Injector Power Drive System Optimization. SAE Int. J. Engines 2014, 7, 1137–1154. [Google Scholar] [CrossRef]
- Tsai, W.C. Optimization of Operating Parameters for Stable and High Operating Performance of a GDI Fuel Injector System. Energies 2020, 13, 2405. [Google Scholar] [CrossRef]
- Xiong, J.; Gu, H. An Intelligent Dual-Voltage Driving Method and Circuit For a Common Rail Injector for Heavy-Duty Diesel Engines. IEEE Access 2018, 6, 27681–27689. [Google Scholar] [CrossRef]
- Kumar, A.; Kumar, A.; Banerjee, N.; Mohan, N.; Ashok, B. Study of the injector drive circuit for a high pressure GDI injector. In Proceedings of the 2016 International Conference on Recent Advances and Innovations in Engineering (ICRAIE), Jaipur, India, 23–25 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Visconti, P.; Ventura, V.; Carlucci, A.P.; Strafella, L. Driving electronic board with adjustable piloting signal parameters for characterization of Common Rail diesel injectors with pure biodiesel. In Proceedings of the 2016 IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 7–10 June 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Tang, Q.; Wojslawowicz, J.; Hoenes, H.P. AN-8208 Introduction to Automotive Ignition Systems. Fairchild Semiconductor Corporation. 2014. Available online: https://www.onsemi.com/pub/Collateral/AN-8208CN.pdf (accessed on 20 February 2022).
- Kubis, M.; Sebok, M.; Beno, P.; Kucera, M.; Gutten, M. Diagnostics of the ignition system for various fault conditions. In Proceedings of the 2020 International Conference on Diagnostics in Electrical Engineering (Diagnostika), Pilsen, Czech Republic, 1–4 September 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Melina, O.M.; STMicroelectronics. Application Note Car Ignition with IGBTs. 1999. Available online: https://www.st.com/resource/en/application_note/an484-car-ignition-with-igbts-stmicroelectronics.pdf (accessed on 20 February 2022).
- Ker, M.D. Whole-chip ESD protection design with efficient VDD-to-VSS ESD clamp circuits for submicron CMOS VLSI. IEEE Trans. Electron Devices 1999, 46, 173–183. [Google Scholar] [CrossRef]
- Boni, A.; Tonelli, M.; Magnanini, A.; Caselli, M. Fully integrated CMOS overvoltage protection circuit for automotive applications. Electron. Lett. 2015, 51, 1316–1318. [Google Scholar] [CrossRef]
- Zeng, J.; Dong, S.; Liou, J.J.; Han, Y.; Zhong, L.; Wang, W. Design and Analysis of an Area-Efficient High Holding Voltage ESD Protection Device. IEEE Trans. Electron Devices 2015, 62, 606–614. [Google Scholar] [CrossRef]
- Wang, Y.; Jia, S.; Chen, Z.; Zhang, G.; Ji, L. A design model of gate-coupling NMOS ESD protection circuit. In Proceedings of the 7th International Conference on Solid-State and Integrated Circuits Technology, Beijing, China, 18–21 October 2004; Volume 2, pp. 856–859. [Google Scholar] [CrossRef]
- Huang, S.C.; Liao, H.F.; Weng, S.P.; Nidhi, K.; Wang, Y.K.; Chen, Y.J.; Chiou, H.C.; Jou, Y.N.; Lee, J.H.; Liao, C.C. Analyzing Gate-Driven Circuit Parameters for Adding ESD Performances. In Proceedings of the 2019 IEEE International Conference on Consumer Electronics-Taiwan (ICCE-TW), Ilan, Taiwan, 20–22 May 2019; pp. 1–2. [Google Scholar] [CrossRef]
- Stockinger, M.; Mertens, R. RC-triggered ESD clamp with low turn-on voltage. In Proceedings of the 2017 IEEE Custom Integrated Circuits Conference (CICC), Austin, TX, USA, 30 April–3 May 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Fan, S.K.; Chen, S.L.; Lin, P.L.; Chen, H.W. Layout Strengthening the ESD Performance for High-Voltage N-Channel Lateral Diffused MOSFETs. Electronics 2020, 9, 718. [Google Scholar] [CrossRef]
- Worley, E. Stacked ESD Protection Circuit Having Reduced Trigger Voltage. U.S. Patent 2008/0259511 A1, 28 September 2008. [Google Scholar]
- Thijs, S.; Scholz, M.; Linten, D.; Griffoni, A.; Russ, C.; Stadler, W.; Lafonteese, D.; Vashchenko, V.; Sawada, M.; Concannon, A.; et al. SCCF—System to component level correlation factor. In Proceedings of the Electrical Overstress/Electrostatic Discharge Symposium Proceedings, Reno, NV, USA, 3–8 October 2010; pp. 1–10. [Google Scholar]
- Martins, M.; Dias, J. CMOS Shunt Regulator with Bandgap Reference for Automotive Environment. IEE Proc. Circuits Devices Syst. 1994, 141, 157–161. [Google Scholar] [CrossRef]
- Smedes, T.; Velghe, R.; Ruth, R.; Huitsing, A. The application of Transmission Line Pulse testing for the ESD analysis of integrated circuits. In Proceedings of the 2001 Electrical Overstress/Electrostatic Discharge Symposium, Portland, OR, USA, 11–13 September 2001; pp. 421–429. [Google Scholar]
- Mergens, M.; Wilkening, W.; Mettler, S.; Wolf, H.; Stricker, A.; Fichtner, W. Analysis of lateral DMOS power devices under ESD stress conditions. IEEE Trans. Electron Devices 2000, 47, 2128–2137. [Google Scholar] [CrossRef]
- Vashchenko, V.; Scholz, M. System Level ESD Protection; Springer: Cham, Switzerland, 2014. [Google Scholar] [CrossRef]
- Coppo, F.; Pepe, G.; Roveri, N.; Carcaterra, A. A Multisensing Setup for the Intelligent Tire Monitoring. Sensors 2017, 17, 576. [Google Scholar] [CrossRef]
- De Oliveira, A.; Moreira dos Santos, E.C.; Botelho, G.C.; Valente, O.S.; Sodré, J.R. Hydrogen electronic injection system for a diesel power generator. Int. J. Hydrogen Energy 2013, 38, 7986–7993. [Google Scholar] [CrossRef]
- Laganá, A.A.; Lima, L.L.; Justo, J.F.; Arruda, B.A.; Santos, M.M. Identification of combustion and detonation in spark ignition engines using ion current signal. Fuel 2018, 227, 469–477. [Google Scholar] [CrossRef]
- Caselli, M.; van Liempd, C.; Boni, A.; Stanzione, S. A low-power native NMOS-based bandgap reference operating from −55 °C to 125 °C with Li-Ion battery compatibility. Int. J. Circuit Theory Appl. 2021, 49, 1327–1346. [Google Scholar] [CrossRef]
- Shanmugam, R.M.; Kankariya, N.M.; Honvault, J.; Srinivasan, L.; Viswanatha, H.C.; Nicolas, P.; Saravanan, N.; Christian, D. Performance and Emission Characterization of 1.2 L MPI Engine with Multiple Fuels (E10, LPG and CNG). SAE Int. J. Fuels Lubr. 2010, 3, 334–352. [Google Scholar] [CrossRef]
- Stepanenko, D.; Kneba, Z. ECU calibration for gaseous dual fuel supply system in compression ignition engines. Combust. Engines 2020, 182, 33–37. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Min | Typ. | Max | Unit | |
|---|---|---|---|---|
| Ignition-Coil or Low-side Injector | ||||
| 220 k | ||||
| −10 | 400 | V | ||
| 1.5 | 8 | V | ||
| 170 | µA | |||
| Area with pad | 0.27 | mm | ||
| High-side Injector | ||||
| 220 k | ||||
| 33 k | ||||
| −10 | 180 | V | ||
| 6 | 32 | V | ||
| 170 | µA | |||
| Area with pad | 0.08 | mm | ||
| Supply Voltage | 4.5 | 5 | 5.5 | V |
| Temperature | −40 | 125 | °C | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boni, A.; Caselli, M.; Magnanini, A.; Tonelli, M. CMOS Interface Circuits for High-Voltage Automotive Signals. Electronics 2022, 11, 971. https://doi.org/10.3390/electronics11060971
Boni A, Caselli M, Magnanini A, Tonelli M. CMOS Interface Circuits for High-Voltage Automotive Signals. Electronics. 2022; 11(6):971. https://doi.org/10.3390/electronics11060971
Chicago/Turabian StyleBoni, Andrea, Michele Caselli, Alessandro Magnanini, and Matteo Tonelli. 2022. "CMOS Interface Circuits for High-Voltage Automotive Signals" Electronics 11, no. 6: 971. https://doi.org/10.3390/electronics11060971
APA StyleBoni, A., Caselli, M., Magnanini, A., & Tonelli, M. (2022). CMOS Interface Circuits for High-Voltage Automotive Signals. Electronics, 11(6), 971. https://doi.org/10.3390/electronics11060971