
Optimal Scheduling of Time-Sensitive Networks for Automotive Ethernet Based on Genetic Algorithm



Abstract
1. Introduction
- (1)
- We assumed that the scheduling problem in TSN is to find an appropriate schedule order of ST, and it has been shown through simulation that it can be solved with a genetic algorithm using order-based representation.
- (2)
- To optimize the schedule, fitness function is defined as weighted sum of normalized indicators; end-to-end delay, jitter, and BUGB. This means that the ST can be scheduled by reflecting three indicators at once, and scheduling will be able to consider network requirements by adjusting the weights.
- (3)
- The proposed approach is simulated in the topology of autonomous vehicle networks and verified for its applicability.
2. Network Model for Scheduling
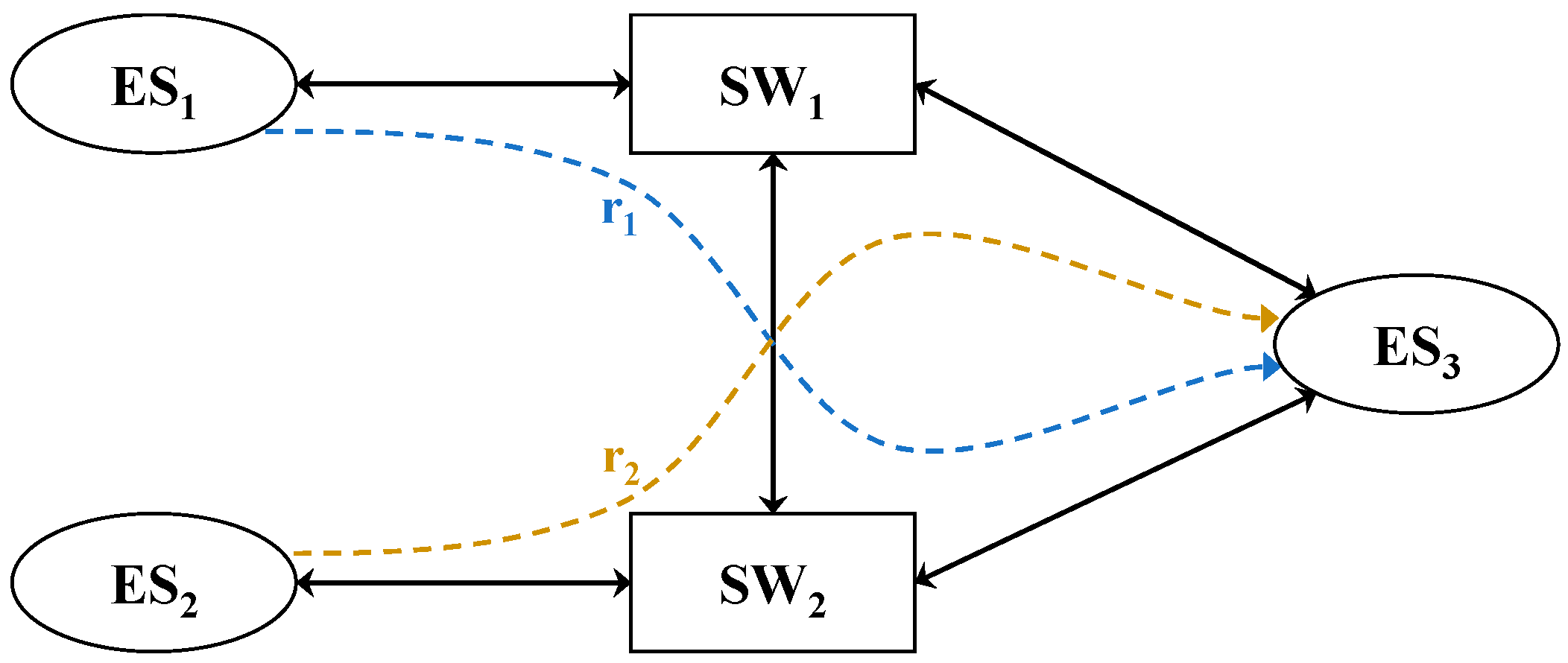
2.1. Architecture Model
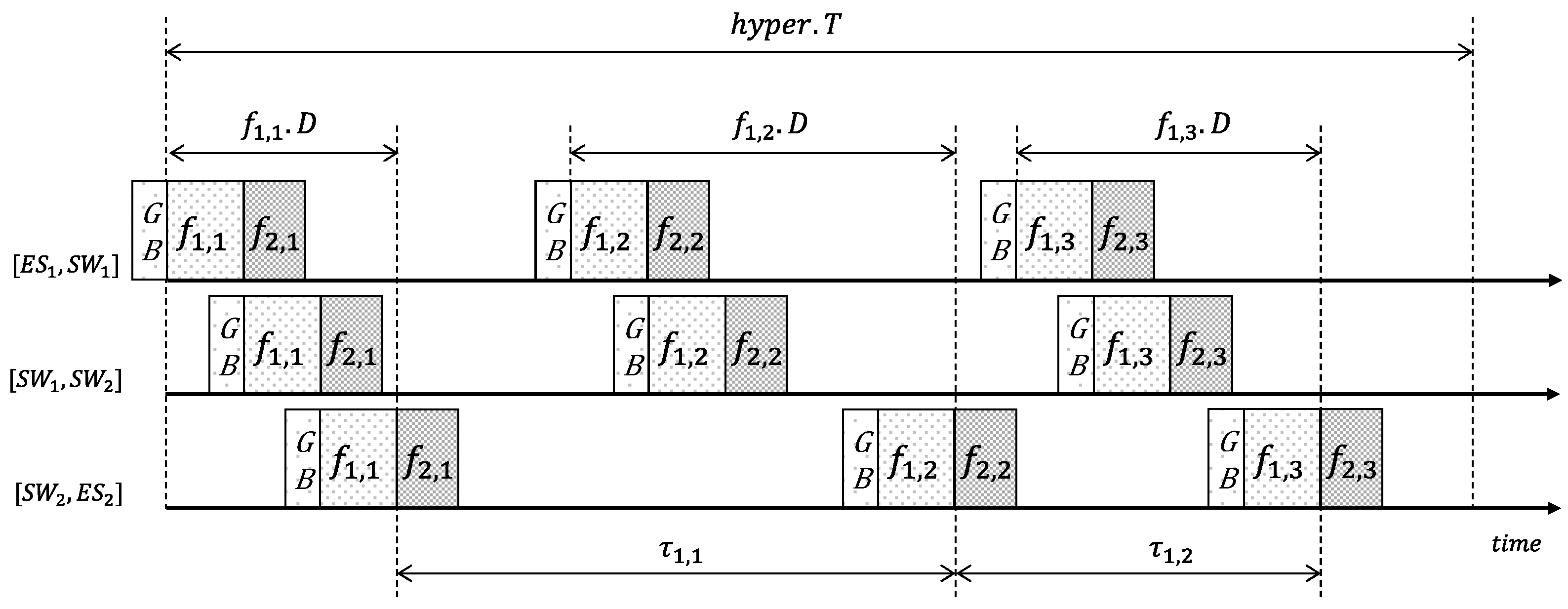
2.2. Application Model
3. Genetic Algorithm for TSN Scheduling
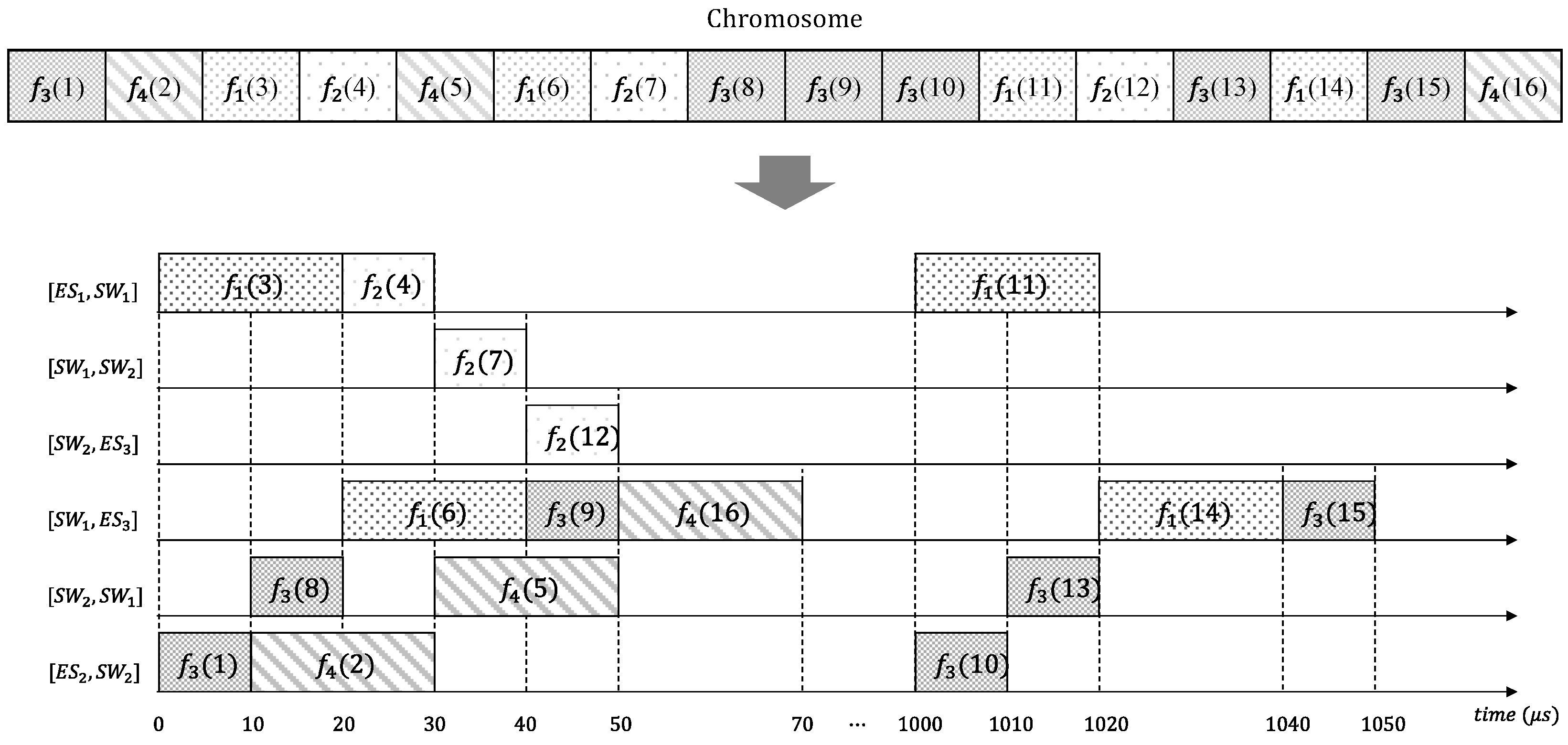
3.1. Chromosome Representation
3.2. Fitness Function
3.2.1. End-To-End Delay
3.2.2. Jitter
3.2.3. Bandwidth Utilization by Guard Bands
4. Scheduling of Time-Sensitive Networks for Automotive Ethernet
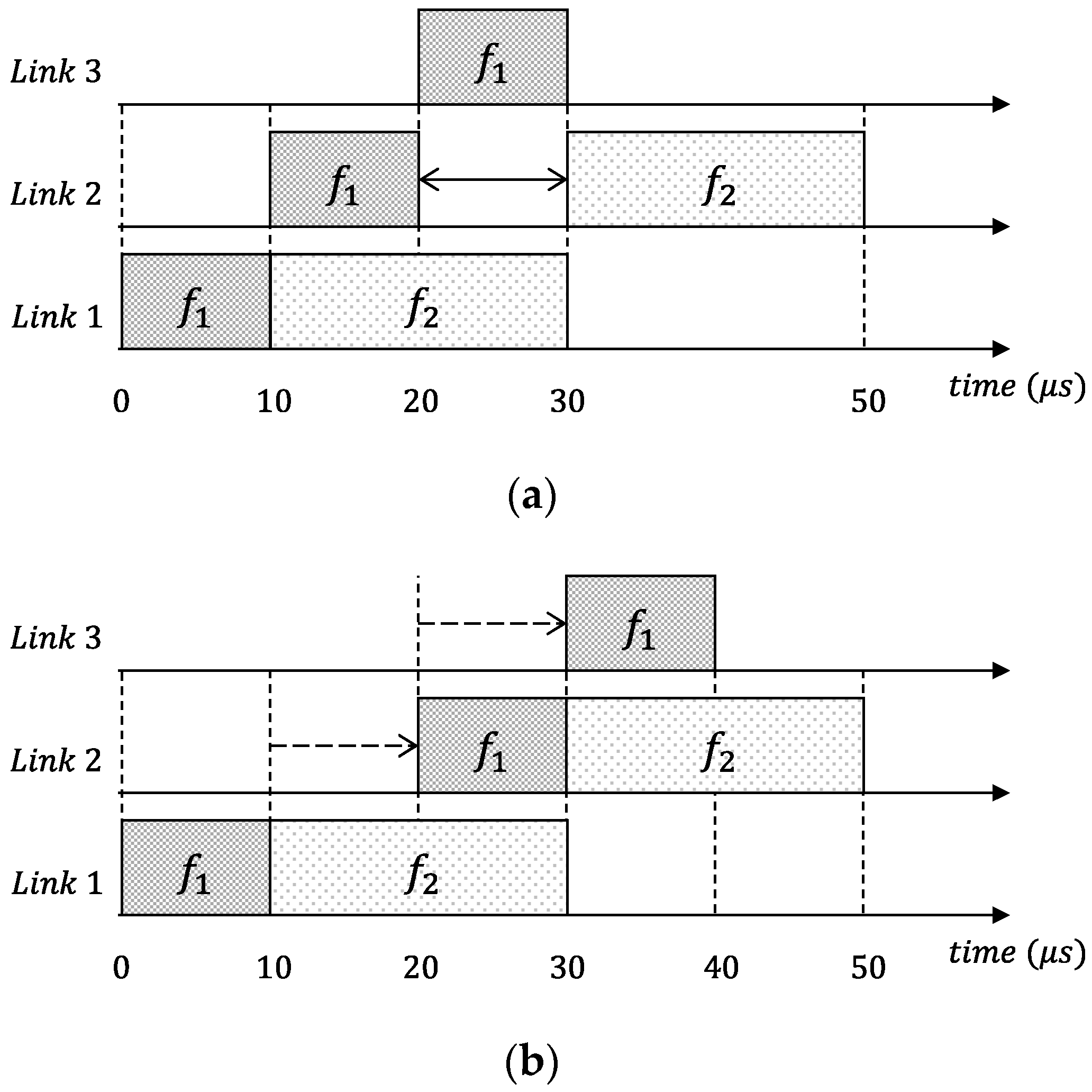
4.1. Schedule Generation Method
4.2. Schedule Compression Method
4.3. Parameter Normalization for Fitness Function
4.4. GA-Based Optimal Scheduling Algorithm
5. Experiments
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- SAE Standard J3016; SAE Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. SAE: Warrendale, PA, USA, 2018.
- Hank, P.; Müller, S.; Vermesan, O.; Van Den Keybus, J. Automotive Ethernet: In-vehicle networking and smart mobility. In Proceedings of the Design, Automation & Test in Europe Conference & Exhibition, Grenoble, France, 18–22 March 2013; pp. 1735–1739. [Google Scholar]
- Hank, P.; Suermann, T.; Müller, S. Automotive Ethernet, a holistic approach for a next-generation in-vehicle networking standard. In Advanced Microsystems for Automotive Applications; Springer: Berlin/Heidelberg, Germany, 2012; pp. 79–89. [Google Scholar]
- Uhlemann, E. Introducing connected vehicles. IEEE Veh. Technol. Mag. 2015, 10, 23–31. [Google Scholar]
- Kim, M.H.; Lee, S.; Ha, K.N.; Lee, K.C. Implementation of a fuzzy-inference-based low-speed, close-range collision warning system for the urban area. Proc. Inst. Mech. Eng. Part D 2013, 227, 234–245. [Google Scholar] [CrossRef]
- Doecke, S.; Grant, A.; Anderson, W.G. The real-world safety potential of connected vehicle technology. Traffic Inj. Prev. 2015, 16, 531–535. [Google Scholar] [CrossRef] [PubMed]
- Zolock, J.; Senatore, C.; Yee, R.; Larson, R.; Curry, B. The Use of Stationary Object Radar Sensor Data from Advanced Driver Assistance Systems (ADAS) in Accident Reconstruction; SAE Technical Paper 2016, 2016-01-1465; SAE: Warrendale, PA, USA, 2016. [Google Scholar]
- Lee, K.C.; Lee, S.; Lee, M.H. Worst case communication delay of real-time industrial switched Ethernet with multiple levels. IEEE Trans. Ind. Electron. 2006, 53, 1669–1676. [Google Scholar] [CrossRef]
- Sommer, J.; Gunreben, S.; Feller, F.; Kohn, M.; Mifaoui, A.; Sass, D.; Scharf, J. Ethernet—A survey on its fields of application. IEEE Commun. Surv. Tutor. 2010, 12, 263–284. [Google Scholar] [CrossRef]
- Bruckner, D.; Stănică, M.; Blair, R.; Schriegel, S.; Kehrer, S.; Seewald, M. An Introduction to OPC UA TSN for industrial communication systems. Proc. IEEE 2019, 107, 1121–1131. [Google Scholar] [CrossRef]
- IEEE 802.1Qbv; Bridges and Bridged Networks—Amendment 25: Enhancements for Scheduled Traffic. IEEE-SA: New York, NY, USA, 2015.
- IEEE 802.1Qbu; Bridges and Bridged Networks—Amendment 26: Enhancements for Frame Preemption. IEEE-SA: New York, NY, USA, 2016.
- Wan, T.; Ashwood-Smith, P. A performance study of CPRI over Ethernet with IEEE 802.1Qbu and 802.1Qbv enhancements. In Proceedings of the IEEE Global Communication Conference, San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar]
- Atallah, A.A.; Hamad, G.B.; Mohamed, O.A. Routing and Scheduling of Time-Triggered Traffic in Time-Sensitive Networks. IEEE Trans. Ind. Inform. 2020, 16, 4525–4534. [Google Scholar] [CrossRef]
- Tindell, K.W.; Burns, A.; Wellings, A.J. Allocating hard real-time tasks: An NP-hard problem made easy. Real-Time Syst. 1992, 4, 145–165. [Google Scholar] [CrossRef]
- Dos Santos, A.C.T.; Schneider, B.; Nigam, V. TSNSCHED: Automated Schedule Generation for Time Sensitive Networking. In Proceedings of the 2019 Formal Methods in Computer Aided Design (FMCAD), San Jose, CA, USA, 22–25 October 2019; pp. 69–77. [Google Scholar]
- Craciunas, S.S.; Oliver, R.S.; Chmelík, M.; Steiner, W. Scheduling real-time communication in IEEE 802.1Qbv time sensitive networks. In Proceedings of the RTNS ‘16: Proceedings of the 24th International Conference on Real-Time Networks and Systems, Brest, France, 19–21 October 2016; pp. 183–192. [Google Scholar]
- Pang, Z.; Huang, X.; Li, Z.; Zhang, S.; Xu, Y.; Wan, H. Flow Scheduling for Conflict-Free Network Updates in Time-Sensitive Software-Defined Networks. IEEE Trans. Ind. Inform. 2021, 17, 1668–1678. [Google Scholar] [CrossRef]
- Liu, Y.; Xiz, J.; Meng, B.; Song, X.; Shen, H. Extended dissipative synchronization for semi-Markov jump complex dynamic networks via memory sampled-data control scheme. J. Frankl. Inst. 2020, 357, 10900–10920. [Google Scholar] [CrossRef]
- Wang, Y.; Hu, X.; Shi, K.; Song, X.; Shen, H. Network-based passive estimation for switched complex dynamical networks under persistent dwell-time with limited signals. J. Frankl. Inst. 2020, 357, 10921–10936. [Google Scholar] [CrossRef]
- Falk, J.; Dürr, F.; Rothermel, K. Exploring Practical Limitations of Joint Routing and Scheduling for TSN with ILP. In Proceedings of the 2018 IEEE 24th International Conference on Embedded and Real-Time Computing Systems and Applications (RTCSA), Hakodate, Japan, 28–31 August 2018; pp. 136–146. [Google Scholar]
- Jones, A.; Rabelo, L.C.; Sharawi, A.T. Survey of Job Shop Scheduling Techniques; NISTIR; National Institute of Standards and Technology: Gaithersburg, MD, USA, 1999. [Google Scholar]
- Gavriluţ, V.; Pop, P. Scheduling in time sensitive networks (TSN) for mixed-criticality industrial applications. In Proceedings of the 2018 14th IEEE International Workshop on Factory Communication Systems (WFCS), Imperia, Italy, 13–15 June 2018; pp. 1–4. [Google Scholar]
- Dürr, F.; Nayak, N.G. No-wait Packet Scheduling for IEEE Time-sensitive Networks (TSN). In Proceedings of the RTNS ’16: Proceedings of the 24th International Conference on Real-Time Networks and Systems, New York, NY, USA, 19–21 October 2016; pp. 203–212. [Google Scholar]
- Raagaard, M.M.; Pop, P. Optimization Algorithm for the Scheduling of IEEE 802.1 Time-Sensitive Networking (TSN); Technical Report; Technical University of Denmark: Lyngby, Denmark, 2017; Available online: http://www2.compute.dtu.dk/~paupo/publications/Raagaard2017aa-Optimization%20algorithms%20for%20th-.pdf (accessed on 10 February 2022).
- Whitley, D. A genetic algorithm tutorial. Stat. Comput. 1994, 4, 65–85. [Google Scholar] [CrossRef]
- Moghadam, A.M.; Wong, K.Y.; Piroozfard, H. An efficient genetic algorithm for flexible job-shop scheduling problem. In Proceedings of the 2014 IEEE International Conference on Industrial Engineering and Engineering Management, Selangor, Malaysia, 9–12 December 2014; pp. 1409–1413. [Google Scholar]
- Lee, K.M.; Yamakawa, T.; Lee, K.M. A genetic algorithm for general machine scheduling problems. In Proceedings of the 1998 Second International Conference, Knowledge-Based Intelligent Electronic Systems, Proceedings KES’98 (Cat. No.98EX111), Adelaide, Australia, 21–23 April 1998; Volume 2, pp. 60–66. [Google Scholar]
- Kim, H.J.; Lee, K.C.; Lee, S. A Genetic Algorithm based Scheduling Method for Automotive Ethernet. In Proceedings of the IECON 2021—47th Annual Conference of the IEEE Industrial Electronics Society, Toronto, ON, Canada, 13–16 October 2021; pp. 1–5. [Google Scholar]
- Kim, H.J.; Choi, M.H.; Kim, M.H.; Lee, S. Development of an Ethernet-Based Heuristic Time-Sensitive Networking Scheduling Algorithm for Real-Time In-Vehicle Data Transmission. Electronics 2021, 10, 157. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frame | Period (ms) | Network Delay (us) | Route |
|---|---|---|---|
| 1000 | 20 | [ES1, SW1] [SW1, ES3] | |
| 2000 | 10 | [ES1, SW1] [SW1, SW2] [SW2, ES3] | |
| 1000 | 10 | [ES2, SW2] [SW2, SW1] [SW1, ES3] | |
| 2000 | 20 | [ES2, SW2] [SW2, SW1] [SW1, ES3] |
| Traffics | Source | Destination | Period (ms) | Size (Byte) | Network Delay (us) | Route |
|---|---|---|---|---|---|---|
| 1 | LRR | DCU | 50 | 125 | 10 | [LRR, SW1], [SW1, DCU] |
| 2 | CAM1 | DCU | 20 | 750 | 60 | [CAM1, SW4], [SW4, SW3], [SW3, DCU] |
| 3 | CAM2 | DCU | 20 | 750 | 60 | [CAM2, SW4], [SW4, SW3], [SW3, DCU] |
| 4 | CAM3 | DCU | 20 | 750 | 60 | [CAM3, SW4], [SW4, SW3], [SW3, DCU] |
| 5 | CAM4 | DCU | 20 | 750 | 60 | [CAM4, SW4], [SW4, SW3], [SW3, DCU] |
| 6 | MRR1 | DCU | 50 | 125 | 10 | [MRR1, SW2], [SW2, DCU] |
| 7 | MRR2 | DCU | 50 | 125 | 10 | [MRR2, SW2], [SW2, DCU] |
| 8 | MRR3 | DCU | 50 | 125 | 10 | [MRR3, SW2], [SW2, DCU] |
| 9 | MRR4 | DCU | 50 | 125 | 10 | [MRR4, SW2], [SW2, DCU] |
| 10 | MRR5 | DCU | 50 | 125 | 10 | [MRR5, SW2], [SW2, DCU] |
| 11 | LIDAR | IVN | 20 | 363 | 29 | [LIDAR, SW1], [SW1, IVN] |
| 12 | LIDAR | DCU | 20 | 363 | 29 | [LIDAR, SW1], [SW1, DCU] |
| 13 | LIDAR | ADR | 20 | 363 | 29 | [LIDAR, SW1], [SW1, SW3], [SW3, ADR] |
| 14 | MAP | DCU | 100 | 625 | 50 | [MAP, SW3], [SW3, DCU] |
| 15 | IVN | DCU | 10 | 250 | 20 | [IVN, SW1], [SW1, DCU] |
| 16 | IVN | LRR | 10 | 250 | 20 | [IVN, SW1], [SW1, LRR] |
| 17 | IVN | MRR1 | 10 | 250 | 20 | [IVN, SW1], [SW1, SW2], [SW2, MRR1] |
| 18 | IVN | MRR2 | 10 | 250 | 20 | [IVN, SW1], [SW1, SW2], [SW2, MRR2] |
| 19 | IVN | MRR3 | 10 | 250 | 20 | [IVN, SW1], [SW1, SW2], [SW2, MRR3] |
| 20 | IVN | MRR4 | 10 | 250 | 20 | [IVN, SW1], [SW1, SW2], [SW2, MRR4] |
| 21 | IVN | MRR5 | 10 | 250 | 20 | [IVN, SW1], [SW1, SW2], [SW2, MRR5] |
| 22 | DCU | IVN | 10 | 250 | 20 | [DCU, SW1], [SW1, IVN] |
| 23 | DCU | IVN | 20 | 250 | 20 | [DCU, SW1], [SW1, IVN] |
| 24 | V2X | MAP | 20 | 250 | 20 | [V2X, SW4], [SW4, MAP] |
| 25 | V2X | DCU | 100 | 250 | 20 | [V2X, SW4], [SW4, SW3], [SW3, DCU] |
| 26 | ADR | DCU | 100 | 500 | 40 | [ADR, SW3], [SW3, DCU] |
| 27 | HVI | DCU | 100 | 125 | 10 | [HVI, SW3], [SW3, DCU] |
| Method | ||||
|---|---|---|---|---|
| GA | −2.2772 | −2.8884 | −1.2000 | −2.2451 |
| Heuristic | −0.3967 | −2.0155 | −1.4000 | −1.0830 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.-J.; Lee, K.-C.; Kim, M.-H.; Lee, S. Optimal Scheduling of Time-Sensitive Networks for Automotive Ethernet Based on Genetic Algorithm. Electronics 2022, 11, 926. https://doi.org/10.3390/electronics11060926
Kim H-J, Lee K-C, Kim M-H, Lee S. Optimal Scheduling of Time-Sensitive Networks for Automotive Ethernet Based on Genetic Algorithm. Electronics. 2022; 11(6):926. https://doi.org/10.3390/electronics11060926
Chicago/Turabian StyleKim, Hyeong-Jun, Kyung-Chang Lee, Man-Ho Kim, and Suk Lee. 2022. "Optimal Scheduling of Time-Sensitive Networks for Automotive Ethernet Based on Genetic Algorithm" Electronics 11, no. 6: 926. https://doi.org/10.3390/electronics11060926
APA StyleKim, H.-J., Lee, K.-C., Kim, M.-H., & Lee, S. (2022). Optimal Scheduling of Time-Sensitive Networks for Automotive Ethernet Based on Genetic Algorithm. Electronics, 11(6), 926. https://doi.org/10.3390/electronics11060926