1. Introduction
The Space-Integrated Ground Information Network consists of space-based network backbone, space-based access network, networks foundation such as nodes, which are connected in a star topology to the land, the sea, and the air environment. It is a variety of communication platforms combining a new type of network architecture, flexible node deployment, and global coverage, to provide free Internet services for space-based network foundation and sea-based platform users with low latency, high reliability, and strong information and communication security infrastructure [
1,
2,
3,
4,
5,
6]. With the wide application of the Space-Integrated Ground Information Network, the requirements for computing speed, storage space, and communication and forwarding resources allocation are increasing. As a result, a machine learning algorithm is introduced into the Space-Integrated Ground Information Network to optimize the network performance and the Space-Integrated Ground Information Network begins to evolve towards the Space-Integrated Ground Information Intelligent Network.
The Space-Integrated Ground Information Intelligent Network is a new intelligent network architecture based on the Space-Integrated Ground Information Network, which uses a machine learning algorithm to optimize network resource allocation, improve network utilization, and implement efficient network information transmission, global space-time continuous communication, highly reliable, continuous communication, and other capabilities. Accurate network traffic prediction is critical for dynamic resource management in the Space-Integrated Ground Information Intelligent Network, and it requires queue scheduling and traffic classification. Network traffic prediction supports effective allocation of network resources, thus speeding up the transmission, avoiding congestion, and reducing the loss of user equipment and base station. However, the accurate prediction of traffic data of the Space-Integrated Ground Information Intelligent Network is challenging because of the highly dynamic network topology, scattered satellite nodes, and long link that lead to frequent interruptions which all result in the high sudden burst and high volatility of traffic in the Space-Integrated Ground Information Intelligent Network.
In this paper, our main work is to search for the shortest time to efficiently analyze and train the simulated time series data of the Space-Integrated Ground Information Intelligent Network, to capture the characteristics of the network traffic, such as high bursts and high volatility, to predict the network traffic data immediately and accurately. First, we divided the data into a training set and a test set, defined the data standardization, and divided the data according to the autocorrelation of network traffic sequence for subsequent calculation by applying the GTCN algorithm. The GTCN algorithm is created based on the TCN that processes the block after the network traffic time series data and feature extraction. Then, store the feature into gating neurons to achieve memory saving, speed up the model processing, and improve the prediction accuracy.
The rest of the paper is arranged as follows: in the following section, we presented several related works. In the third section, we introduce the structure of the TCN algorithm and in the fourth section, we perform data processing and modeling for the traffic characteristics of the Space-Integrated Ground Information Intelligent Network and propose the GTCN algorithm. In the fifth section, we use OPNET to simulate the traffic data of the Space-Integrated Ground Information Intelligent Network and the traffic data of the ground network to demonstrate the high volatility of the traffic of the Space-Integrated Ground Information Intelligent Network. Then, we applied a variety of algorithms to complete the network traffic prediction task and discuss the experimental results. Finally, we summarize the experimental results and discuss future research in the sixth section.
2. Related Work
Currently, several forecasting models for ground and satellite network traffic have been proposed, such as the traditional ARIMA, Markov Model, gray prediction model, and cross-related entropy prediction model [
7,
8]. The popular models based on machine learning, such as Recurrent Neural Network (RNN) and its variants, Long Short-Term Memory (LSTM) and Gated Recursive Unit (GRU), have taken advantage of their respective characteristics in various network traffic forecasting tasks. The traditional network traffic prediction models with offline training save memory and time and have achieved high precision. However, with the advancements of science and technology, especially the neural network algorithm, by using better CPU, GPU, and real-time training, machine learning algorithms for network traffic prediction models producing high accuracy and robustness have emerged.
The author(s) in [
9] proposed a network traffic prediction scheme based on the adaptive kernel least-mean-square (KLMS) algorithm, which predicted the satellite network traffic by minimizing the mean square error (MSE) through iterative weight coefficient. However, due to over-reliance on the training data, the algorithm was prone to the over-fitting phenomenon. In [
10], the author(s) proposed an algorithm based on wavelet analysis and LSTM used in the Software Defined Network (SDN) for network traffic prediction. In this algorithm, the network traffic data are analyzed using wavelet decomposition denoising, which changes the modal sequences of the single-mode state to join the LSTM again after following the calculation process described above to increase the prediction accuracy. However, the field of view of this algorithm is limited, in which each prediction only perceives the estimated value and the detailed value of the previous node. As mentioned in the literature [
11], the satellite network traffic has self-similarity property. Therefore, in the satellite network traffic with self-similarity, the global characteristics should be included in the calculation instead of simply referring to the data influence of the previous node in the traffic prediction of the intelligent network of the Space-Integrated Ground Information Intelligent Network. The author(s) in the literature [
12] also uses the LSTM algorithm in the distribution of induction training to complete the Web traffic time series forecasting task, which results in greatly improved LSTM training speed. However, in the Space-Integrated Ground Information Intelligent Network, because of its sudden burst and self-similarity, the distributed asynchronous training might fail to grasp the flow characteristics, and the prediction accuracy of sudden traffic shall be greatly reduced. In the literature [
13], the author(s) used Support Vector Regression (SVR) to perform phase-space reconstruction using real-time local sequence to determine the best SVR parameters for embedding dimension and delay time. However, in real-time, new data are included into the model calculation, thus all the parameters involved in the model change and constantly updated, making the algorithm complexity too high and not applicable for the Space-Integrated Ground Information Intelligent Network. The author(s) in the literature [
14] implemented GPR (Gaussian Process Regression) to minimize the error propagation using step-wise prediction, as the traffic behavior of high-speed links depends on protocols (e.g., TCP, UDP, HTTP) at small time scales. However, the stepwise algorithm failed to consider the connection between local and global time series, so it cannot cope with the sudden bursts of the Space-Integrated Ground Information Intelligent Network. In the literature [
15], the author(s) proposed the application of wavelet decomposition and reconstruction of the satellite communication network traffic data processing by using the Echo State Network (ESN) structure to create the model to predict network traffic data. However, the accuracy of the ESN network parameters and the time complexity depends on the reserve pool and its parameters have to be constructed artificially; thus, there is no guarantee of the stability of the forecast and the performance in different environments. Moreover, various model generalization ability is weak and not applicable to the Space-Integrated Ground Information Intelligent Network forecasting task. Other network traffic prediction algorithms [
16,
17,
18] cannot be directly applied for the Space-Integrated Ground Information Intelligent Network due to the limited suitable environment and weak generalization ability.
The main difference between the proposed algorithm in this paper and the existing technologies is as follows. Inspired by the TCN algorithm in [
19], the Convolutional Neural Networks (CNN) are optimized to perform the traffic prediction task of the Space-Integrated Ground Information Intelligent Network, instead of the common approach of using RNN and its variants to solve the time series prediction. TCN algorithm has the advantages of CNN algorithm, namely, high parallelism, in which sequences can be processed in parallel without the need for sequential processing such as RNNs. The receptive field of TCN is very flexible and its size is determined by the number of convolution layers, the size of the convolution kernel, and the expansion coefficient. TCN does not have the gradient disappearance and gradient explosion problems of RNNs, thus its gradient is relatively stable. Additionally, TCN has lower memory consumption because it does not need to save every step information such as RNNs. However, in the intelligent network of the Space-Integrated Ground Information Intelligent Network, the network traffic sample is large, so more memory is needed to directly apply the TCN algorithm to predict the network traffic. The proposed algorithm in this paper extracts the network traffic data by using TCN in sequence and saves the eigenvalues of each segment by using gated unit screening to reduce the number of neurons and memory consumption and to predict the intelligent network traffic of the Space-Integrated Ground Information Intelligent Network more accurately and rapidly.
3. TCN Neural Network
The traditional convolutional neural network is not suitable for modeling time series problems such as network traffic prediction. Because of the size limitation of the convolutional kernel, the traditional convolutional neural network cannot capture the lengthy time information in the time series well. Therefore, TCN was developed by Bai in 2018 to solve time series modeling and natural language processing problems [
19]. TCN neural network consists of three parts, namely, causal convolution, expansion convolution, and residual linkage. The principle of causal convolution is to produce a value at time t of the upper layer by only depending on the value at time t of the next layer and the value before it. Thus, the time series is subject to strict time constraints and only the observed information is used for feature extraction and prediction. The structure of causal convolution is shown in
Figure 1.
When the input time series is {
x0,
x1,
x2, …,
xt−1}, to ensure that the input size is the same as the output size, appropriate zero paddings are carried out in front of the input data. The causal convolution formula is as follows:
The prediction is implemented according to the sequence {x0, x1, x2, …, xt−1}, so that the prediction result is closer to the actual value.
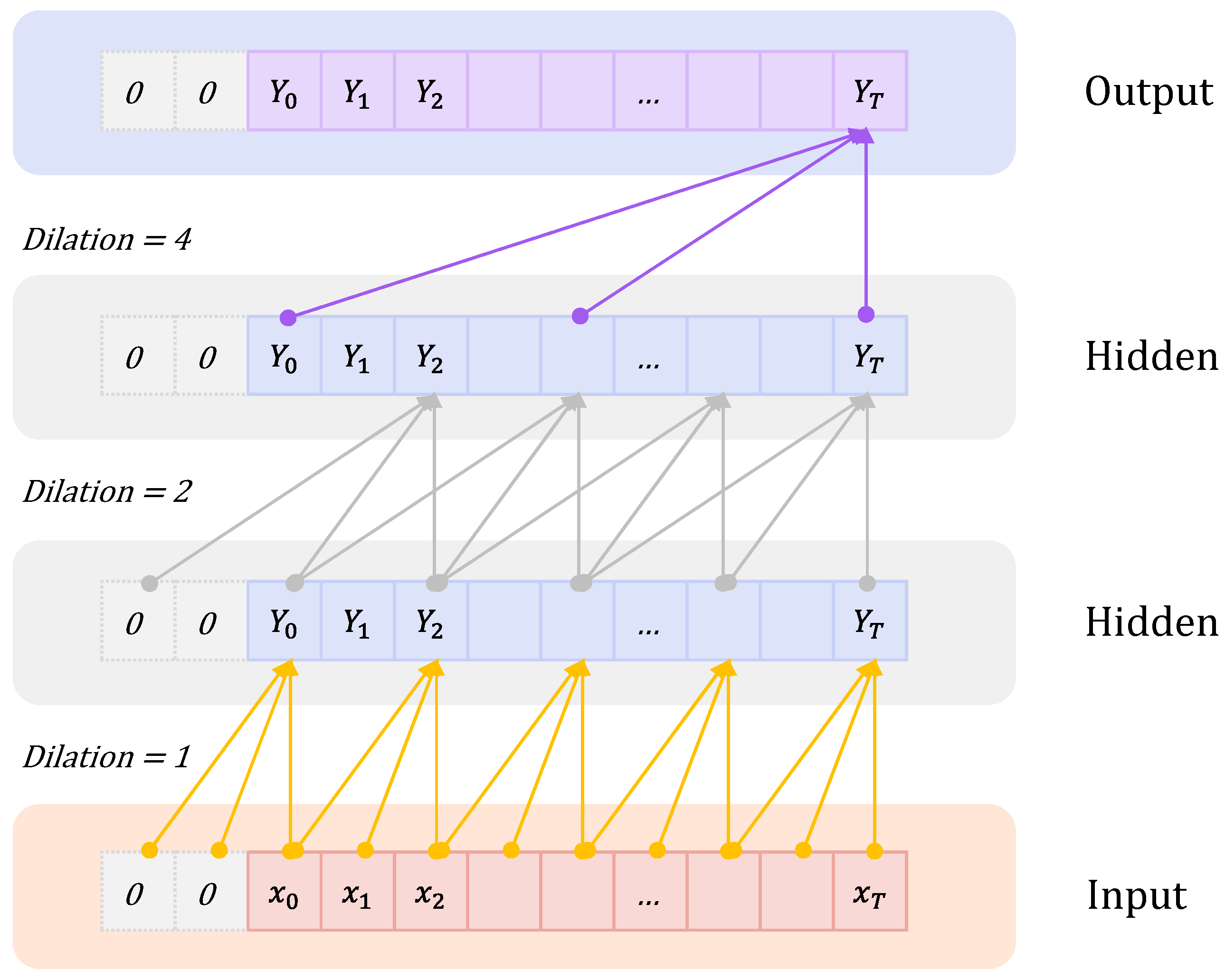
Dilated convolution is introduced based on causal convolution to reduce the number of convolution layers, to avoid the gradient disappearance problem in neural network training, and to make the causal convolution’s model length for time series no longer limited by the size of the convolution kernel. The structure of dilated convolution is shown in
Figure 2.
Unlike causal convolution, dilated convolution allows interval sampling of the input during convolution and the sampling rate is controlled by the Dilation in
Figure 2. Dilation = 1 in the lowest layer means that every point is sampled input and Dilation = 2 in the middle layer means that every two points are sampled as input. Generally, the higher the convolution layer, the greater the value of the expansion coefficient, allowing the network to use the least number of layers to obtain a larger receptive field. The expansion convolution formula is as follows:
where
f is the convolution kernel calculation,
k is the number of convolution layers, the expansion convolution operates on the element
s, and
d is the expansion coefficient.
When the number of layers of the neural network is too deep, the gradient disappearance problem often occurs, causing the gradient of the shallow layer to not be updated. The residual network has been proved to be able to solve the deep network degradation and gradient disappearance problems [
20]. The residual network structure is shown in
Figure 3.
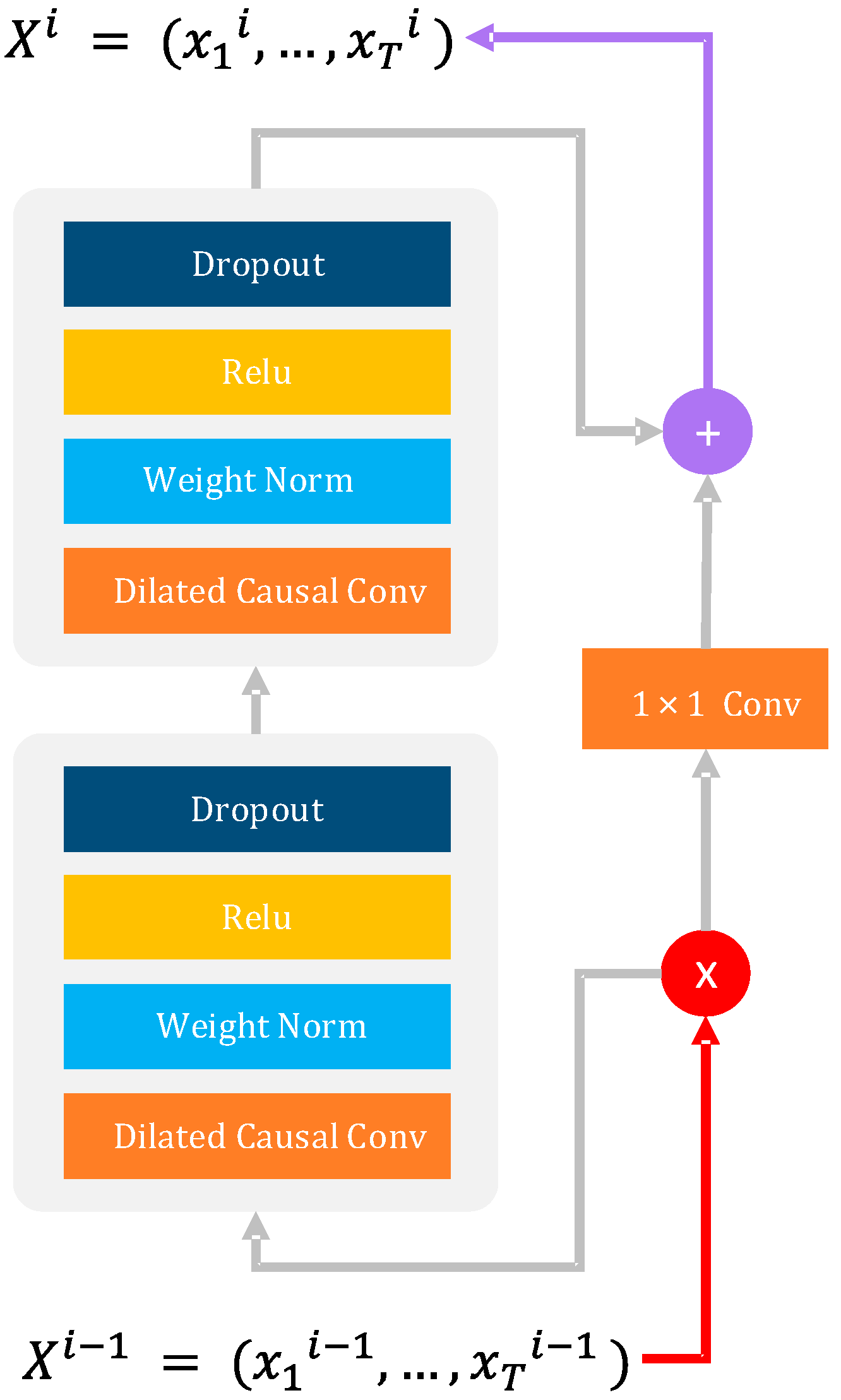
After the calculation of the first weight on the first layer, the input sequence is adjusted by the ReLU activation function and then enters the next layer’s weight. The ReLU activation function can improve both calculation speed and convergence speed. In the residual network structure, the problem of reversed error is changed from F(x) to H(x). In this way, when the error is the lowest, F(x) = 0, is the only requirement to ensure that the network state of the next layer is still in the optimal state. Consequently, we can prevent the neural network from continuing to optimize when the optimal solution is reached, which shall result in degradation. The residual block of a TCN network is shown in
Figure 4.
A TCN network model consists of two layers of expansion convolution and a nonlinear mapping. In each layer, a weight normalization and a dropout algorithm are used to regularize the network, which reduces the possibility of overfitting, strengthens the generalization ability, and improves the accuracy of training and prediction.
4. GTCN Algorithm
GTCN algorithm consists of three parts: network traffic data segmentation, gated units, and TCN algorithm. Because the Space-Integrated Ground Information Intelligent Network has a big traffic sample, robust burst of network flows, and sequences of the network traffic with self-similarity, we need to use the network traffic block for data preprocessing, to facilitate the subsequent training and forecasting, by using the TCN algorithm in each segment and extracting the feature sequence. Finally, each section’s characteristic sequence is added to the gating control unit in memory and updated.
4.1. Network Traffic Data Segmentation
We perform segmentation of network traffic data to enable TCN in predicting the traffic rapidly and accurately when processing large samples of the network traffic time series, without consuming excessive computing resources. The entire network traffic data were divided into equal-length segments and each segment was trained separately using TCN. To preserve the correlation between each segment, we applied the self-correlation degree of network traffic data as the basis of segmentation. Self-correlation is an important attribute of a single sequence in a time series, allowing us to observe the lag variable that is used to predict the reference, that is, the degree of correlation between previous data and a certain sampling point. The degree of autocorrelation is determined by the self-correlation and the calculation of the autocorrelation coefficient is as follows:
The autocorrelation function of the time series is the set of several order autocorrelation coefficients, where n is the data volume, H is the order of the autocorrelation coefficient, and μ is the mean value of the time series. The autocorrelation coefficient value is between −1 and 1. When the absolute value of the autocorrelation coefficient is closer to 1, a strong correlation of the time series is shown; on the other hand, when the absolute value of the autocorrelation coefficient is closer to 0, a weak correlation is shown.
As a criterion to evaluate the influence of past time nodes on current time node, the autocorrelation coefficient can help us to determine the sample size of each segment well. Since the relevance usually has a small sample size, the strong correlation between the sample size is smaller. To avoid excessive piecewise gating control unit update reset too frequently, weak correlations with large values of sequence are included in the reference and the relevance ratio of the sample size, as the sample size of each paragraph does not terminate the network traffic in achieving relevance and enhancing the training efficiency. Because of the self-similarity of the traffic data of the Space-Integrated-Ground Information Intelligent Network, there is no need to create a separate model for each data segment, instead, the same training model can be used for every data segment.
4.2. Gating Control Unit
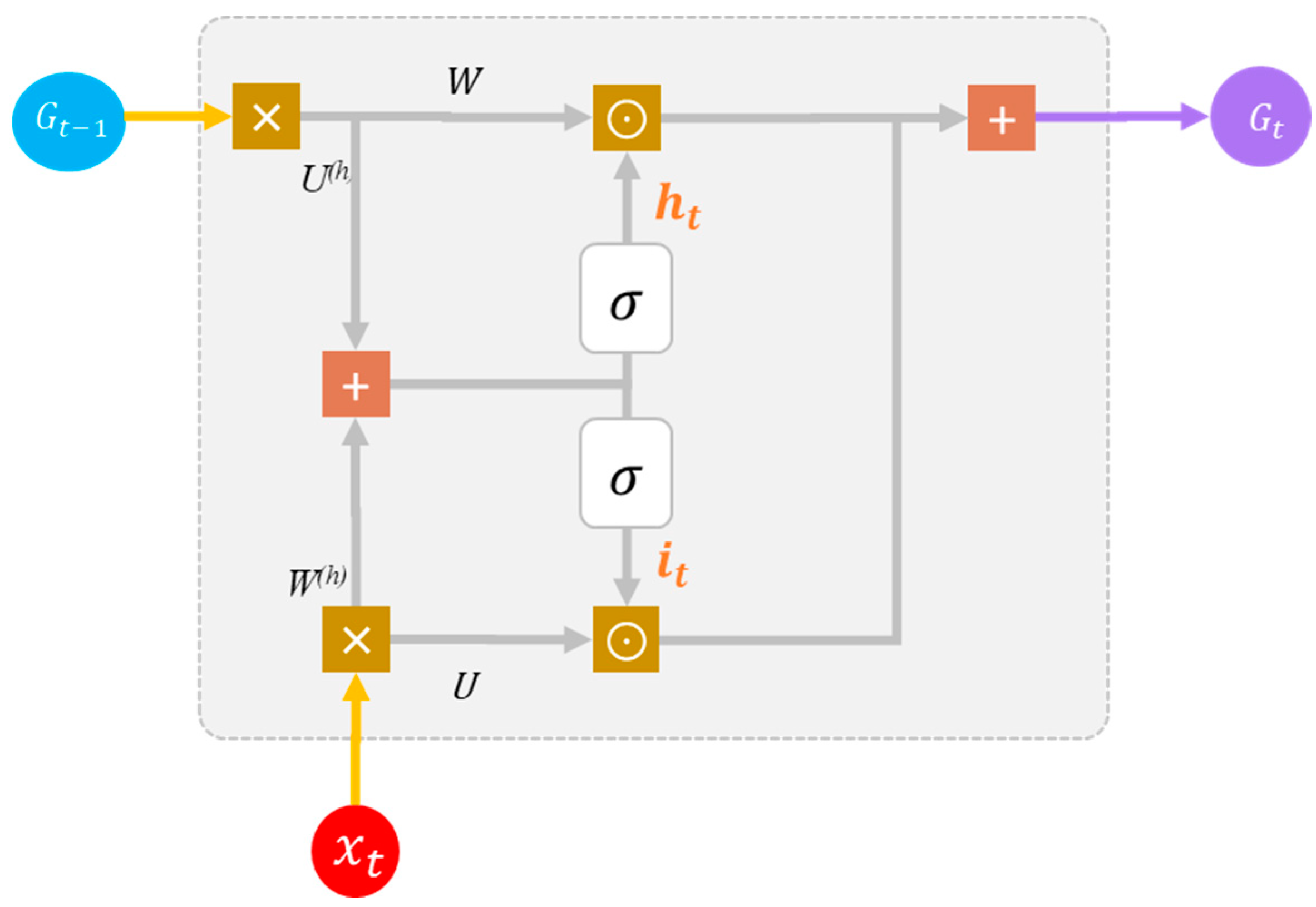
As an important feature of RNN varieties, the gating unit can capture the dependence of the time series well. For example, the double gates of GRU and the triple gates of LSTM can solve the problem that RNN cannot deal with, the long-term dependence that is caused by the gradient disappearance and gradient explosion. The function of the Gating Control Unit in GTCN is to save the characteristic information of each segment, adjust the prediction result of each segment and improve its accuracy. In a segmented time sequence, because the distance between each segment and the forecast target is different, the influence of each segment to the forecast target is also different. Generally, the farther the distance of the target segmentation forecast, the influence to predict the target is smaller. Thus, in this study we added a historical information control gate and an input information control gate to control the influence of historical information and current information on the prediction target. The structure of GRU’s gating unit is shown in
Figure 5.
The gating control unit consists of two parts: the historical information control gate and the input information control gate. The influence degree of historical subsection information
Gt−1 on the prediction results was determined through the historical information control gate. The input information control gate is used to determine the contribution degree of the current input segmented information
xt in the prediction. Both the historical information control gate and the input information control gate of the gate control unit depend on the output value of the Sigmoid excitation function to determine the influence degree of information. The calculation method of the Sigmoid excitation function is as follows:
where
t is the sequence after weight calculation.
The output value of the Sigmoid excitation function is between 0 and 1, which is used to control the output value of the historical information control gate and the input information control gate. Overall, 1 means completely reserved, and 0 means completely discarded. The calculation method of the historical information control gate is as follows:
where σ is the excitation function Sigmoid,
xt is the input sequence,
Gt−1 is the information of the gate of the previous time step
t − 1,
W(h) and
U(h) are the weight matrices of the historical information control gate. The historical information control gate provides a final output as an activation result between 0 and 1 to determine the degree of influence of the historical information on the predicted results.
The calculation method of the input information control gate is as follows:
The equation of the input information control gate is similar to the historical information control gate. W(i) and U(i) are the weight matrices of the input information control gate. Finally, an activation value between 0 and 1 is also output to determine the contribution degree of the current input information xt to the predicted result.
Finally, the output value of the historical information control gate and the input information control gate can be used to determine the information to be collected from the current input segment
xt and the previous time step information
Gt−1. The calculation formula is as follows:
W and
U are the weight matrices of the new memory content. Thus, the final memory of the current time step of the gated neural unit can be determined.
4.3. GTCN for Traffic Prediction
Since TCN is a variant of CNN and has expanded causal convolution to expand receptive field, it has most of the advantages of CNN, such as high parallelism, flexible receptive field, gradient stability, and lower memory consumption compared with RNN and its variant algorithms. The accuracy and speed of time series prediction are beyond doubt. Moreover, the field of view of TCN is much higher than RNN and its variants, makes TCN very suitable to capture the characteristics of high burst and high volatility of the Space-Integrated Ground Information Intelligent Network. However, in the TCN, the convolution process is limited by the size of the reception field; thus, in dealing with longer time series such as network traffic data, the reception field is restricted due to slow processing speed and memory consumed. The TCN neurons will ignore the characteristics between data in the time series, especially if the capture duration is longer than the time series, causing poor performance. This property of the GRU helped the door control unit store longer sequence information and characteristics to capture the high burst and high volatility of the network traffic. The long network traffic is based on the time sequence of the relevant section in TCN for training and introduction to put every trained sequence control neural cell update and reset, the input should be in sequence instead of the data points. To ensure complete capture of the sequence of each segment information, instead of recording the characteristics of the entire time series, TCN neurons only need to record the generalized characteristics of each segment and turn to the gating unit to record the relationship between the sequences. This algorithm can reduce resource consumption, provide better performance to the advantages of TCN, compensate for TCN due to the limited vision field to capture more web traffic sequence information, and because of its high parallelism, can undertake various sectional training at the same time, to improve data processing efficiency, more rapidly and accurately, and complete the integration of the Space-Integrated Ground Information Intelligent Network prediction tasks. The structure of GTCN is shown in
Figure 6.
When the GTCN model receives the network traffic sequence, it creates data segmentation according to the autocorrelation of the data. After the segmentation of network traffic data, we put the processed data into the TCN model, in which each segment is trained using the same TCN model. We adjust the dropout parameters of TCN and use a small number of TCN neurons in each training to ensure the generalization of the TCN neural network. Since the input and output lengths of TCN are the same, to avoid affecting the length of the segment, a part of the next segment is be added as the training sample, and the sample size of the next segment equal to the multiple of the sample size represented by the self-correlation degree. Then, the training results of this segment and the next segment are the input of the gating unit for training, and the gating unit is reset and updated to remember the eigenvalues of each data segment. In the prediction stage, we select the last segment as the input to obtain the prediction result.
Compared with RNN and its variants, GTCN has a larger field of view, which can clearly capture the high burst and high volatility of the intelligent network traffic data of the Space-Integrated Ground Information Intelligent Network, and faster computing speed. Compared with the TCN algorithm, GTCN can record the data features of previous data using the gating unit to reduce the storage pressure of the TCN neurons, thus capturing the periodicity of the intelligent network traffic data of the Space-Integrated Ground Information Intelligent Network, leading to higher prediction accuracy. However, in terms of memory occupancy, since the algorithm in this paper introduced the gated unit to record the characteristic information, the memory occupancy in each segment through TCN and the gated unit training is higher than other moments. The maximum instantaneous memory occupancy of the GTCN algorithm is much higher than other algorithms, which is the cost of improving the accuracy and speed of the algorithm.
5. Simulation and Result Analysis
5.1. Simulation Experiment
In the simulation experiment, OPNET simulation software was used to simulate the Space-Integrated Ground Information Intelligent Network environment to obtain the data. A satellite network composed of six satellites was used to simulate the data flow formed by the ground communication traffic through this network. The simulated time was one week and the traffic data information of a node was randomly collected for analysis and learning. The ground communication data are uploaded to the satellite network through the currently covered satellite nodes and sent to the receiving end through the network. The position of each satellite changes with time, and the traffic transmission is not stable to simulate the burst and periodicity of the traffic data in the intelligent network of the Space-Integrated Ground Information Intelligent Network. Simultaneously, we designed a ground network with the same number of communication nodes to simulate the data flow of ground nodes and collect their traffic data under the same conditions. We calculated the variances of the two networks to represent and compare their volatility. The experiment showed that the variance of the traffic of the Space-Integrated Ground Information Intelligent Network was 1,319,308.70, and the variance of the traffic of the ground network was 47,820.93, proving that the traffic volatility of the Space-Integrated Ground Information Intelligent Network was much higher than the ground network.
5.2. Network Traffic Data Analysis and Preprocessing
According to the OPNET simulation, we can obtain the traffic data of the Space-Integrated Ground Information Intelligent Network with sudden bursts, periodicity, and stability, so the ordinary ground network traffic prediction method does not apply to the Space-Integrated Ground Information Intelligent Network. We need to segment and preprocess the data to facilitate the GTCN algorithm.
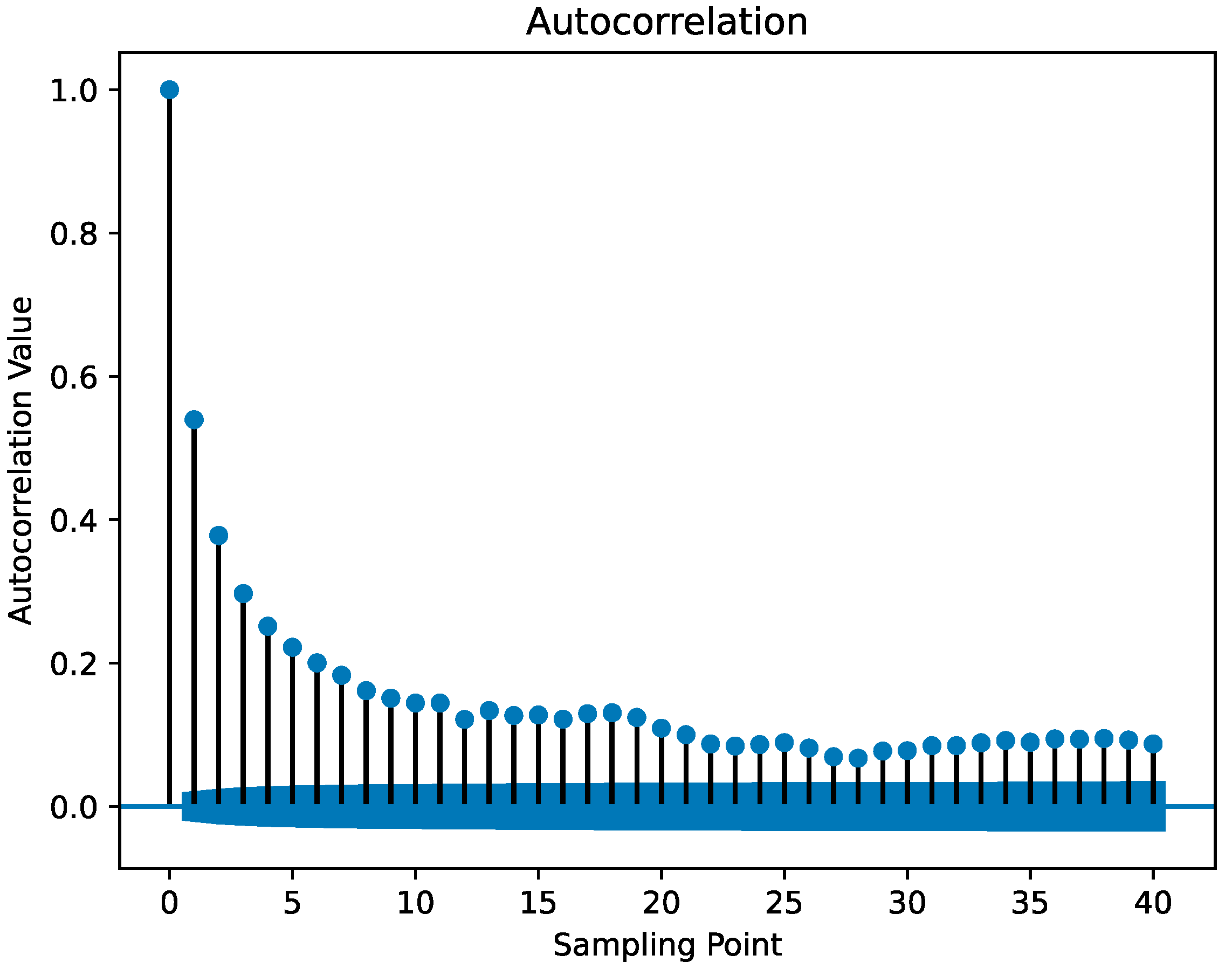
First, we analyze the autocorrelation of the network traffic sequence to determine the segment of the traffic sequence. The reference of calculation is shown in Equation (3) and the autocorrelation of the intelligent network traffic in the Space-Integrated Ground Information Intelligent Network is shown in
Figure 7.
From
Figure 7, we can observe that in the network traffic sequence, each sampling point has a strong correlation with the first two sampling points. A weak correlation with a large value is shown between the third sampling point in front of each sampling point and the 40th sampling point in front of each sampling point. While the segmenting period is too long and should not be too short, these weak correlation sequences with higher values can be included in the basis of the segment. Therefore, in this experiment, a length of 40 samples is taken as the segmentation length, with 1200 sampling points in each segment. Data preprocessing supports the neural network model to process the data quicker by normalization and standardization of data, and to reduce the learning pressure of the neural network, thus improving the speed and efficiency of learning features of neurons.
5.3. Experimental Results and Discussion
Due to its simple structure and high accuracy, the ARIMA model is chosen as a traditional prediction method, which is widely used in time series prediction. The ARIMA model is suitable for comparing and evaluating the advantages and disadvantages of the proposed algorithm. Additionally, recently, the RNN and its variation performed the network traffic prediction task very well, especially the gating GRU helped with LSTM neural network structure that makes the RNN free from the explosion gradient. Because LSTM and GRU have different performances in different tasks, in this paper, GRU and LSTM are selected as the GTCN to compare with the traditional cyclic neural network. As an improved algorithm, we included the TCN model in the experiment as well. In this experiment, the ARIMA model, GRU model, LSTM model, TCN model, and the proposed algorithm were implemented in the same simulation environment. After traffic prediction, the training time, the calculation time, and the root-mean-square error (RMSE) of the models were calculated as simulation evaluation indexes to objectively evaluate the proposed algorithm. The data from one-week duration were used as the training data and the data from the next day were used as the prediction samples for prediction and validation.
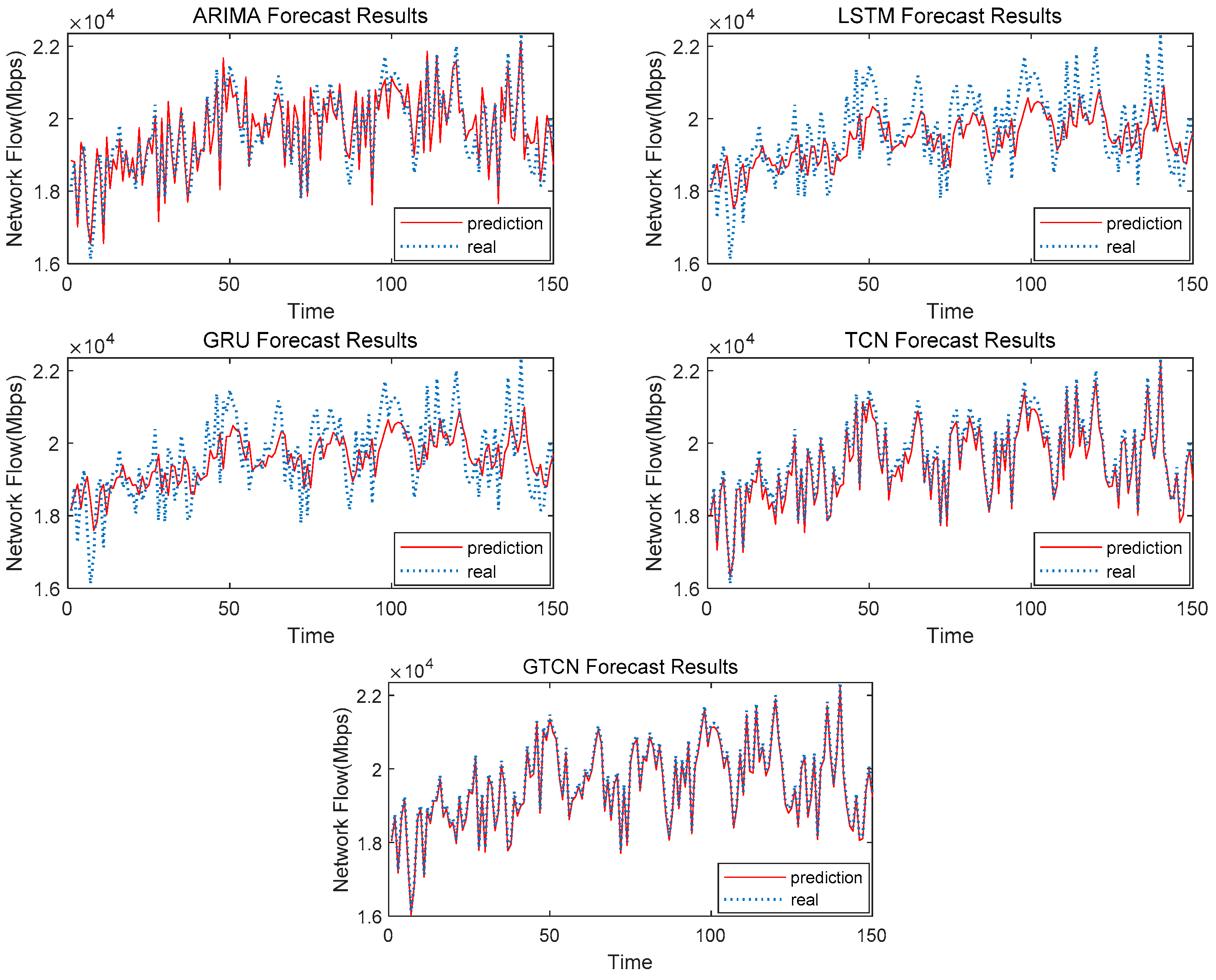
Figure 8 shows the last 150 comparative results of the prediction results of the five models in this experiment. In the comparison results, the neural network used the Adam algorithm as the optimization algorithm. The gradient descent process has certain randomness; thus, to eliminate the effects of the randomness of each algorithm, in this experiment, the algorithms were executed ten times and the average result is presented as the final prediction results.
Except for the ARIMA model, which is an offline training method without the training time calculation, all the other models are compared with the results of 5000 times of training. The results show that the GRU model and the LSTM model could not converge rapidly under shorter training times. However, since the training frequency is too little, even though they could fit the trend, they do not perform well when dealing with the sudden burst of network traffic. The ARIMA model was able to achieve a better prediction after parameter adjustment. However, due to the need to re-analyze and adjust the parameters when processing different network traffic sequences, the model does not retain generalization. The TCN algorithm, due to the calculation without the gating control unit, the training speed and prediction speed were slightly faster; however, because the flow sequence sample size is large, the accuracy becomes low and the prediction is delayed. Since the integration of the Space-Integrated Ground Information Intelligent Network of the intelligent network has traffic bursts, this phenomenon shall bring a higher error. According to
Figure 8, the GTCN algorithm proposed in this paper can achieve convergence rapidly with less training time, almost completely fit with the real value, and the prediction result is better compared to the other four algorithms.
Table 1 shows the comparison of the experiment results. In this table, the prediction accuracy of the five algorithms and the comparison between the training speed and the running speed can be observed in detail.
From the table, we can observe that under the same experiment environment and training times, the integrated intelligent network traffic prediction task of the Space-Integrated Ground Information Intelligent Network using LSTM with GRU, because of the need for data iteration, they have to wait for the current input to be evaluated to the next step of the calculation; thus their training times are longer, 811.57 s and 501.33 s, respectively. Moreover, due to the small receptive field during calculation, the algorithm cannot capture the characteristics of high volatility and high bursts of network traffic, leading to high RMSE values, which are 975.55 and 964.20, respectively. After data analysis and model screening, the ARIMA model can complete the prediction task better. ARIMA model has no training time because it uses offline training, so the calculation time of the prediction is slightly longer than the other three algorithms, which is 14.83 s. As a result, the ARIMA model has the highest prediction delay lag for the integration of the Space-Integrated Ground Information Intelligent Network of the intelligent network traffic burst. After capturing the periodicity of the network traffic, its RMSE value is also lower at 515.40, since in processing different time series, it must confirm the parameters needs artificially, leading to a weak generalization of the model. The TCN algorithm can process data rapidly through convolution. Compared with other algorithms, its training time is faster (44.62 s), and the prediction speed is the shortest (1.28 s). Compared with the traditional algorithms, its RMSE is lower (236.28). Using the value of RMSE as the basis for accuracy judgment, the proposed GTCN algorithm improved the prediction accuracy, training speed, and prediction speed, compared with the traditional three algorithms. The prediction accuracy was at maximum increased by 90.00%, the training speed was increased by at least 84.05%, and the prediction speed increased by at least 71.92%. Compared to the TCN algorithm, the GTCN algorithm has a higher training time and run time to improve the prediction accuracy, thus the accuracy of GTCN improved by 58.72% than the TCN algorithm. The GTCN can handle the problem of high burst, high volatility, and large sample size of the intelligent network of the Space-Integrated Ground Information Intelligent Network better and can fulfill the demand of its network traffic prediction task.
We used the “psutil” module in the Python library to access the model memory value and use the maximum and average values to obtain the Maximum Instantaneous Memory Usage (MIMU) and Average Memory Usage (AMU).
Table 2 shows the MIMU and AMU of each algorithm for training and prediction. The cost of improving the prediction accuracy of the algorithm in this paper can be analyzed in detail.
According to the data in the table, since the GTCN algorithm proposed in this paper introduces TCN and the gating unit at the same time, the MIMU of the GTCN algorithm during training is higher than other comparison algorithms (90.01 MB), but the AMU of the GTCN algorithm is lower than the comparison algorithm (41.31 MB/s). Because the field of view of GTCN is larger than that of LSTM, GRU, and ARIMA, the MIMU and AMU of GTCN are lower than the above three algorithms, while the MIMU and AMU of GRU are slightly higher than the of the TCN algorithm due to the introduction of the gate control unit.
6. Conclusions
Firstly, this paper introduced the traffic characteristics of the Space-Integrated Ground Information Intelligent Network and pointed out the shortcomings of the existing algorithms in dealing with the traffic prediction problem. Then, we proposed an algorithm to fulfill the demand of the intelligent network traffic prediction task of the Space-Integrated Ground Information Intelligent Network, improve the training speed before the prediction, and the accuracy during the prediction as well as the algorithm running speed, and efficiently process the network traffic data with large sample size, high burst, and high volatility. The methods of segmenting network traffic data according to the degree of self-correlation, the GTCN algorithm combining the gating unit and the TCN algorithm are proposed. Then, the traditional algorithm of ARIMA and variations of RNN, such as LSTM, GRU, TCN, and GTCN algorithms were compared under the same experimental environment. We demonstrated that the proposed algorithm, GTCN, can improve the prediction accuracy, especially when traffic bursts occur. It can handle the high volatility and high burst of network traffic well and can greatly enhance the predicted efficiency to complete the Space-Integrated Ground Information Intelligent Network traffic prediction task. However, since the GTCN is a variation of CNN, to speed up the training by using parallel processing, join the gating control unit, and so on, the memory resources consumption for training shall be higher than other algorithms. Therefore, compared with the air base and sea base which require more stringent computing resources, GTCN is more suitable to be applied to the ground base, where not only can the resources be afforded and guaranteed but also convenient for the foundation of the Space-Integrated Ground Information Intelligent Network as a whole and the planning of intelligent networks of other units. As a preparatory study for other tasks of the Space-Integrated Ground Information Intelligent Network, the traffic prediction proposed in this paper lays a foundation for the research of queue scheduling and congestion control.
Author Contributions
Conceptualization, C.P. and L.Y.; methodology, Y.W.; software, Y.W.; validation, C.P., L.Y. and Y.W.; formal analysis, Y.W.; investigation, Y.W.; resources, L.Y.; data curation, Y.W.; writing—original draft preparation, Y.W.; writing—review and editing, C.P. and L.Y.; visualization, Y.W.; supervision, L.Y.; project administration, C.P.; funding acquisition, C.P. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by [National Natural Science Foundation of China] grant number [No.61722105, No. 61931004] And the APC was funded by [Dalian University].
Conflicts of Interest
The authors declare no conflict of interest.
References
- Liu, L.X. Space-and-Ground Integration Network; Science Press: Beijing, China, 2015; pp. 2–6. ISBN 978-7-03-044567-4. [Google Scholar]
- Shi, H.F.; Wang, C.G.; Cai, R.Y.; Wei, D.B. Node Static Processing and Caching Strategy in Space-Ground Integrated Intelligent Network. Comput. Eng. 2021, 47, 30–36. [Google Scholar] [CrossRef]
- Mei, Q.; Shi, N.; Li, Y.X.; Peng, X.H.; Jiang, C. Research on Application Operation Development of Space-Integrated-Ground Information Network. Space-Integr.-Ground Inf. Netw. 2020, 1, 95–102. [Google Scholar]
- Cheng, Y.; Han, X.D.; Chen, L.L. Function Reference Model and Key Technologies of Space-Integration Ground Information Network. Space Electron. Technol. 2017, 14, 39–42, 47. [Google Scholar] [CrossRef]
- Zeng, H.; Qian, L.J. Airborne Gateway: Key Technology of Earth Observation System in the Space-Air-Ground Integration Network. In Proceedings of the 2019 2nd International Academic Forum on Computer Information Science and Application Technology, Guangdong, China, 30 August–1 September 2019. [Google Scholar]
- Chi, L.H.; Lin, H.W.; Lin, W.H.; Liu, Z.H. Research on development of Space-ground integration information network. In Proceedings of the 2020 International Conference on Urban Engineering and Management Science, Zhuhai, China, 28 Febuary–1 March 2020. [Google Scholar]
- Qu, H.; Ma, W.T.; Zhao, J.H. Prediction Method for Network Traffic Based on Maximum correntropyCriterion. China Commun. 2013, 10, 134–145. [Google Scholar] [CrossRef]
- Ma, W.T.; Qu, H.; Zhao, J.H. Estimator with Forgetting Factor of Correntropy and Recursive Algorithm for Traffic Network Prediction. In Proceedings of the 2013 25th Chinese on Control and Decision Conference (CCDC), Guiyang, China, 25–27 May 2013; IEEE: New York, NY, USA, 2013; pp. 490–494. [Google Scholar]
- Zhao, J.H.; Wang, M.X.; Qu, H.; Xie, Z.Y.; Liu, X. An Adaptive KLMS Traffic Prediction Algorithm for Satellite Network. J. Beijing Univ. Posts Telecommun. 2018, 41, 51–55. [Google Scholar] [CrossRef]
- Zhu, L.Y.; Zhuang, Y.J. Research on Traffic Forecasting with Neural Network Algorithms in SDN Environment. Netw. Secur. Technol. Appl. 2020, 3, 43–45. [Google Scholar]
- Wei, D.B.; Pan, C.S.; Han, R. Self-similarity Analysis of Satellite Network Traffic. Comput. Sci. 2013, 40, 67–69, 88. [Google Scholar] [CrossRef]
- CasadoVara, R.; Rey, A.M.D.M.D.; Pérez-Palau, D.; De-La-Fuente-Valentín, L.; Corchado, J.M. Web Traffic Time Series Forecasting Using LSTM Neural Networks with Distributed Asynchronous Training. Mathematics 2021, 9, 421. [Google Scholar] [CrossRef]
- Meng, Q.F.; Chen, Y.H.; Peng, Y.H. Small-Time Scale Network Traffic Prediction Based on a Local Support Vector Machine Regression Model. Chin. Phys. B 2009, 18, 2194–2199. [Google Scholar] [CrossRef]
- Bayati, A.; Nguyen, K.; Cheriet, M. Multiple-Step-Ahead Traffic Prediction in High-Speed Networks. IEEE Commun. Lett. 2018, 22, 2447–2450. [Google Scholar] [CrossRef]
- Qin, H.X.; Yang, F. A New Traffic Flow Prediction Algorithm for Satellite Communication Network. Telecomm. Eng. 2013, 53, 835–839. [Google Scholar] [CrossRef]
- Fan, J.Y.; Mu, D.J.; Liu, Y. Research on Network Traffic Prediction Model Based on Neural Network. In Proceedings of the 2019 2nd International Conference on Information Systems and Computer Aided Education, Chengdu, China, 7–10 December 2018; IEEE: New York, NY, USA, 2019; pp. 554–557. [Google Scholar]
- Zhu, L.; Qin, L.; Xue, K.Y.; Zhang, X.Y. A Novel BP Neural Network Model for Traffic Prediction of Next Generation Network. In Proceedings of the 2009 Fifth International Conference on Natural Computation, Tianjian, China, 14–16 September 2009; IEEE: New York, NY, USA, 2009; Volume I, pp. 32–38. [Google Scholar]
- Donner, A.; Kissling, C.; Hermenier, R. Satellite constellation networks for aeronautical communication: Traffic modelling and link load analysis. IET Commun. 2010, 4, 1594–1606. [Google Scholar] [CrossRef]
- Bai, S.; Kolter, J.Z.; Koltun, V. An Empirical Evaluation of Generic Convolutional and Recurrent Networks for Sequence Modeling. arXiv 2018, arXiv:1803.01271v2. [Google Scholar]
- He, K.M.; Zhang, X.Y.; Ren, S.Q. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision & Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; IEEE: New York, NY, USA, 2016; Volume 1, pp. 770–778. [Google Scholar]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}