
Energy Management Strategy for Plug-In Hybrid Electric Vehicles Based on Driving Condition Recognition: A Review


Abstract
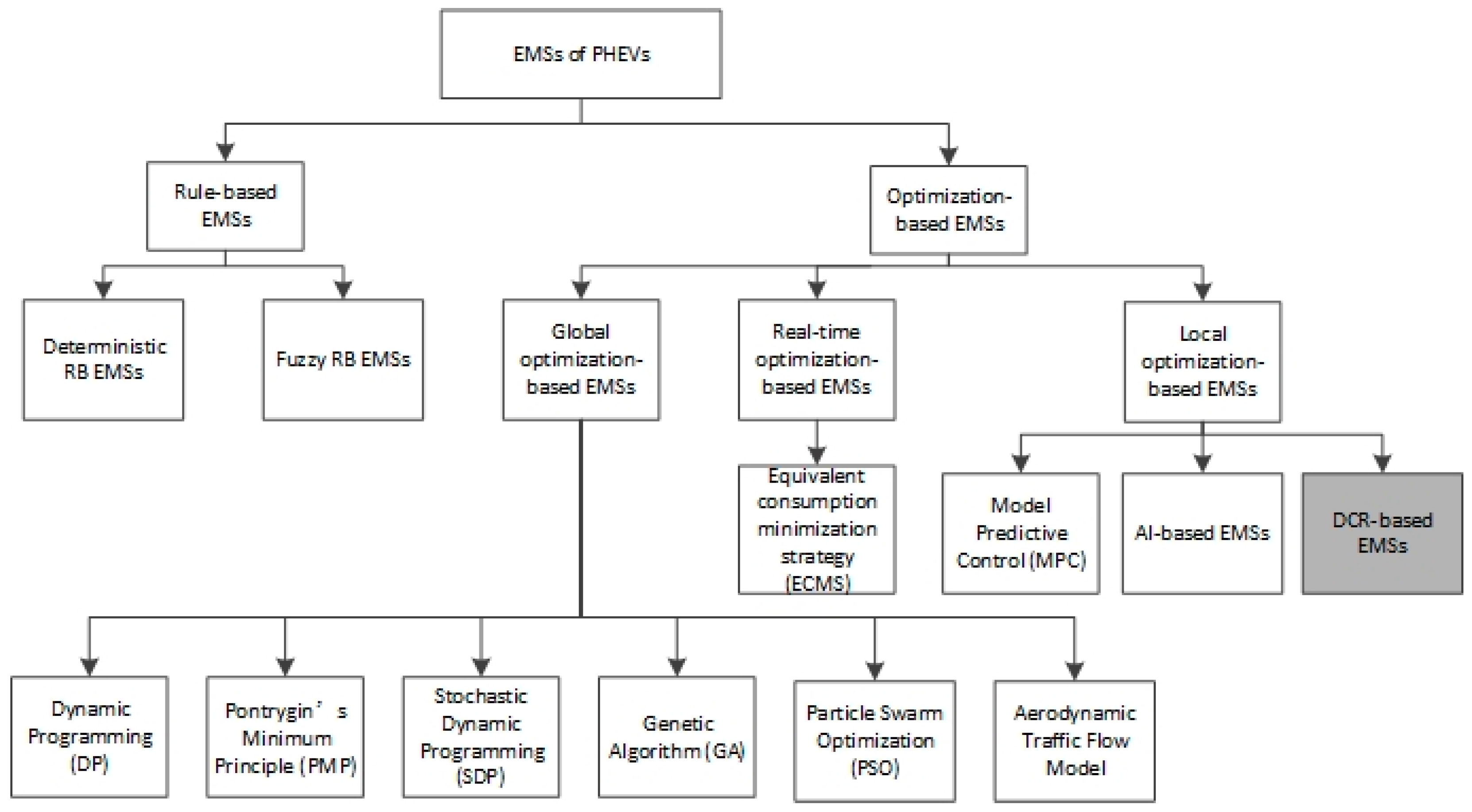
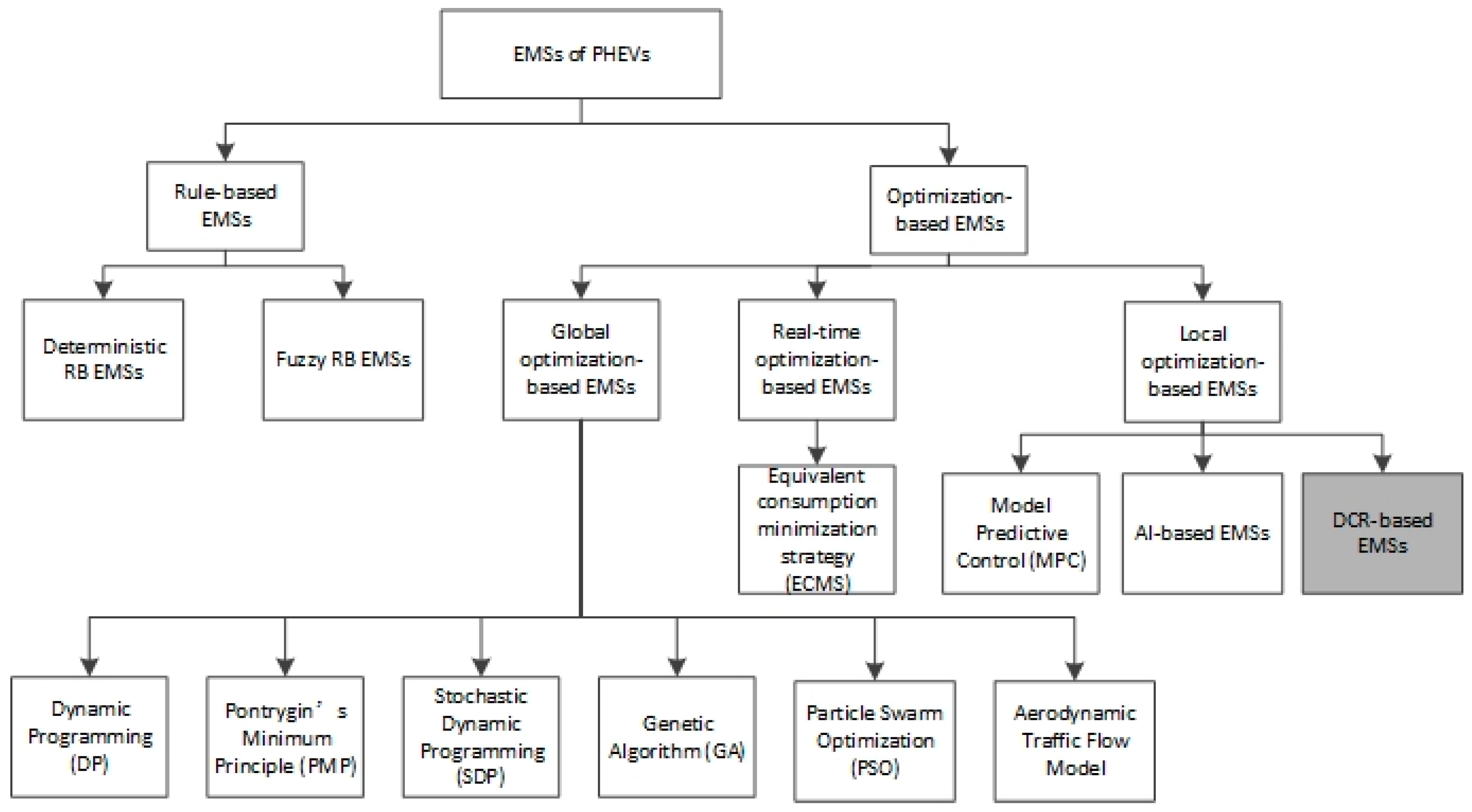
:1. Introduction
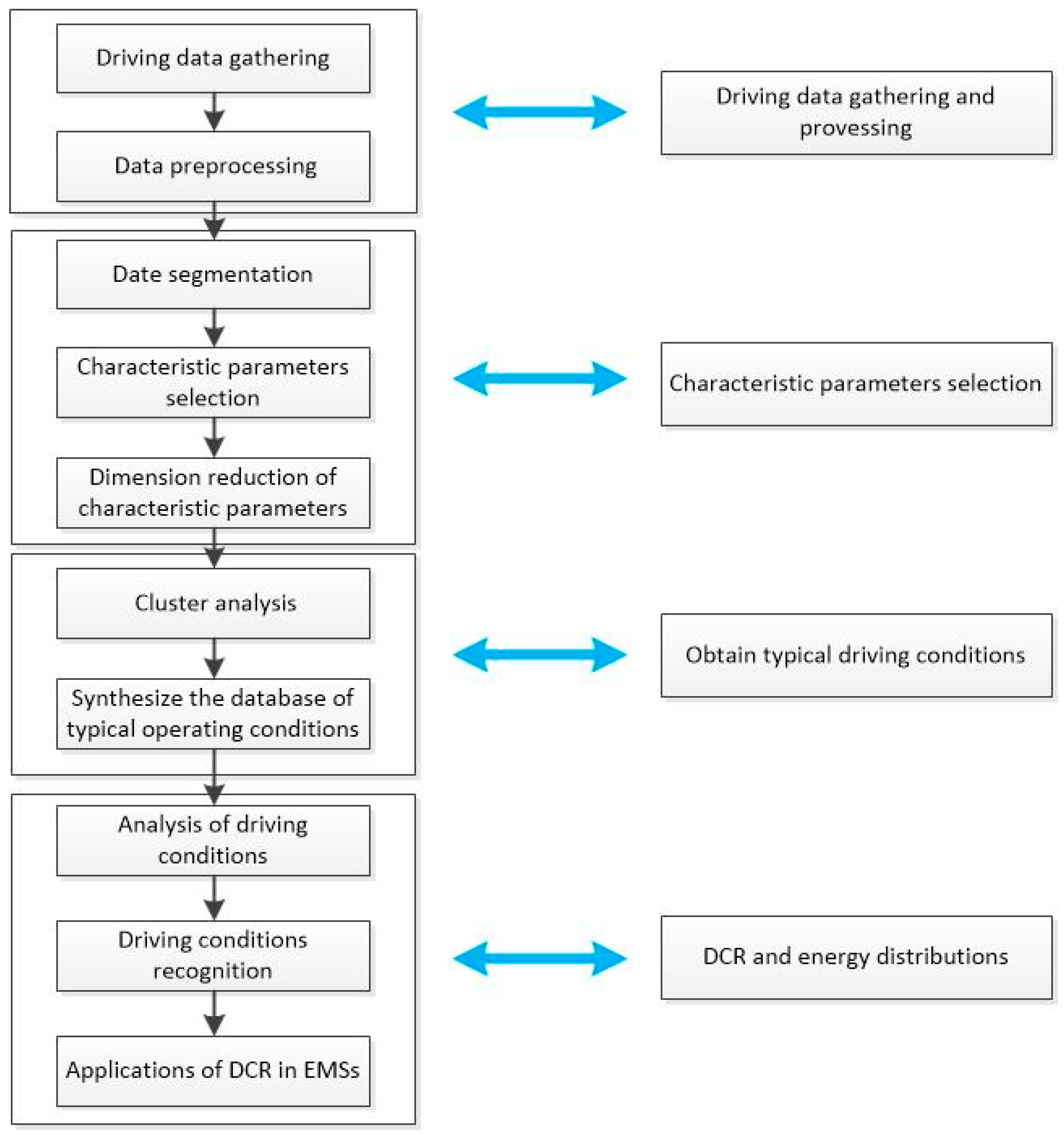
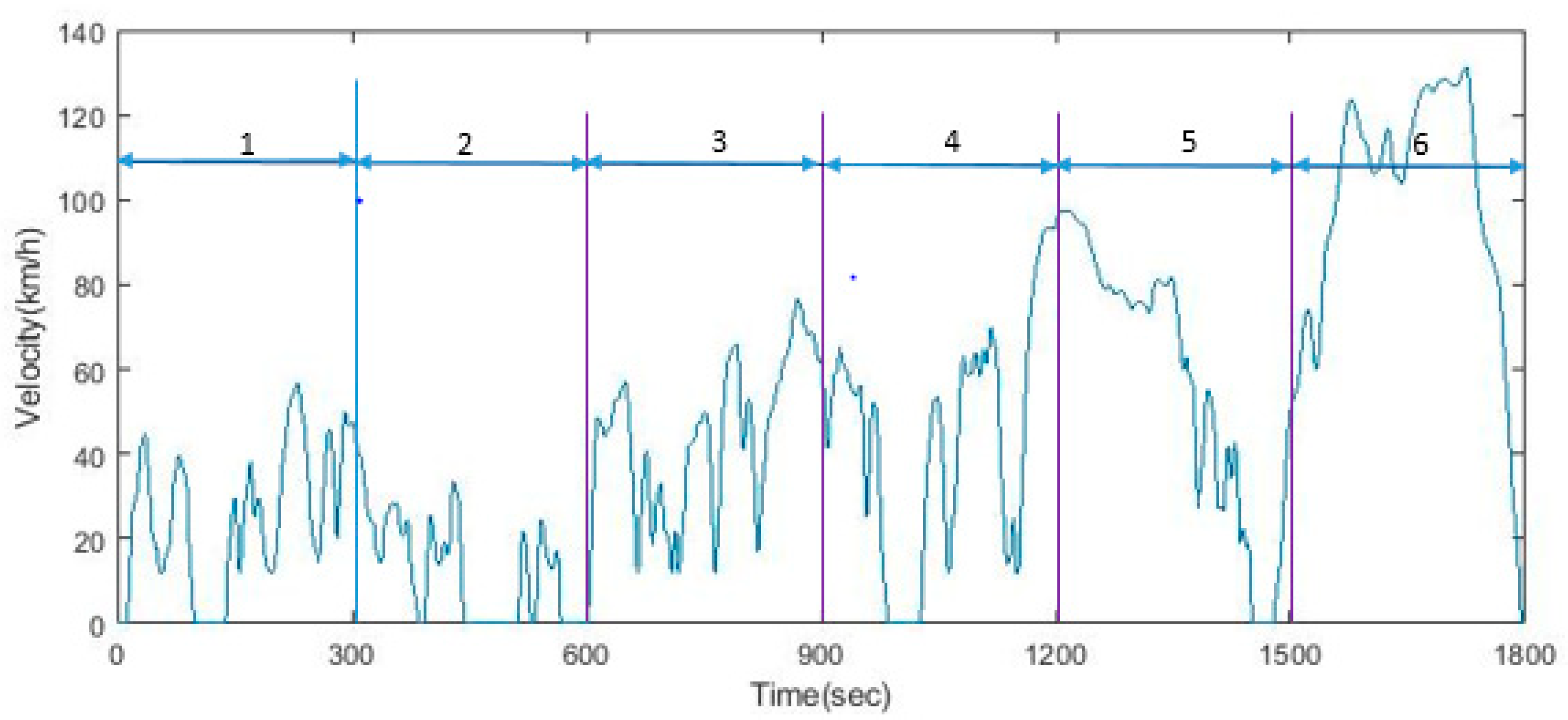
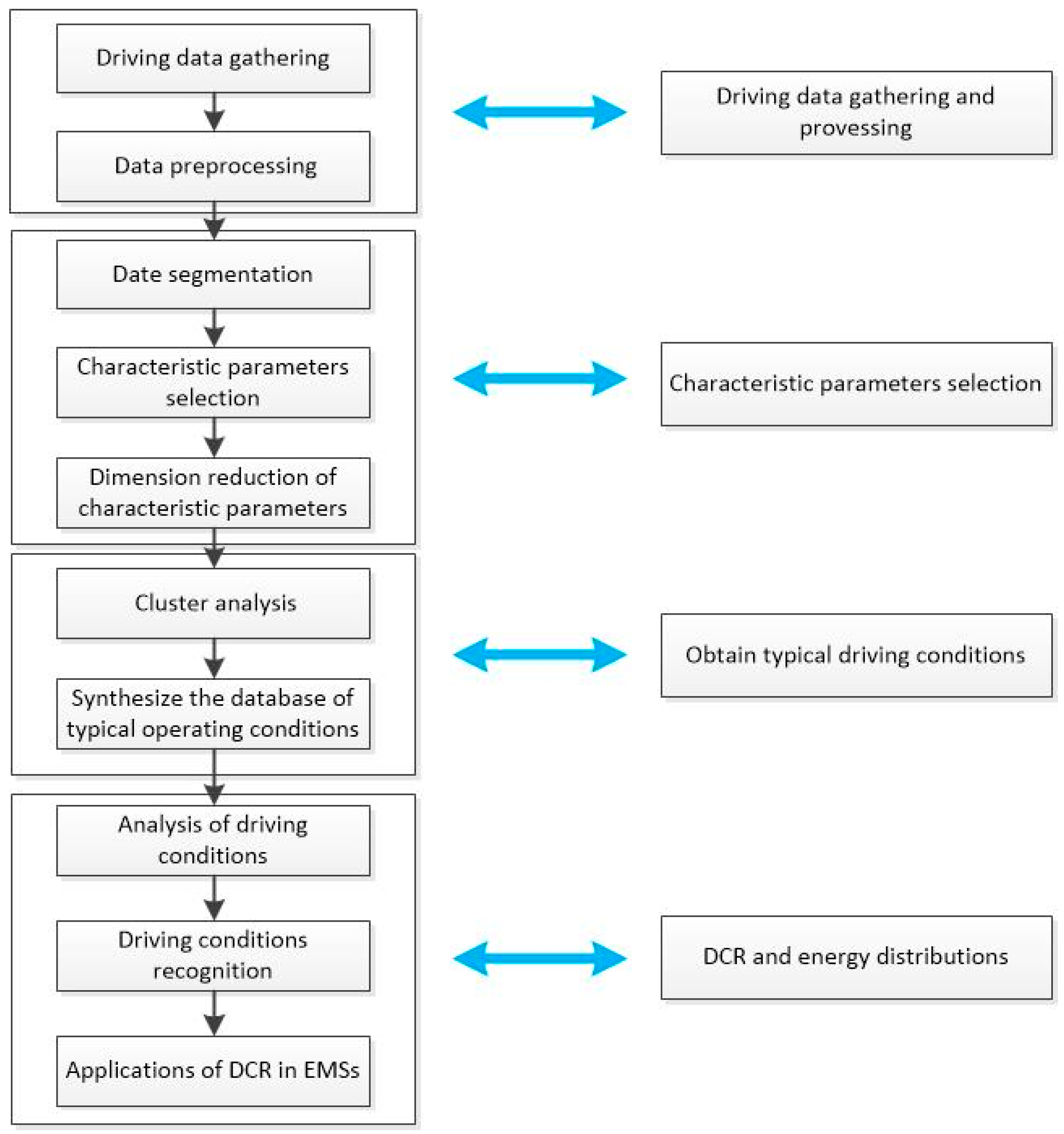
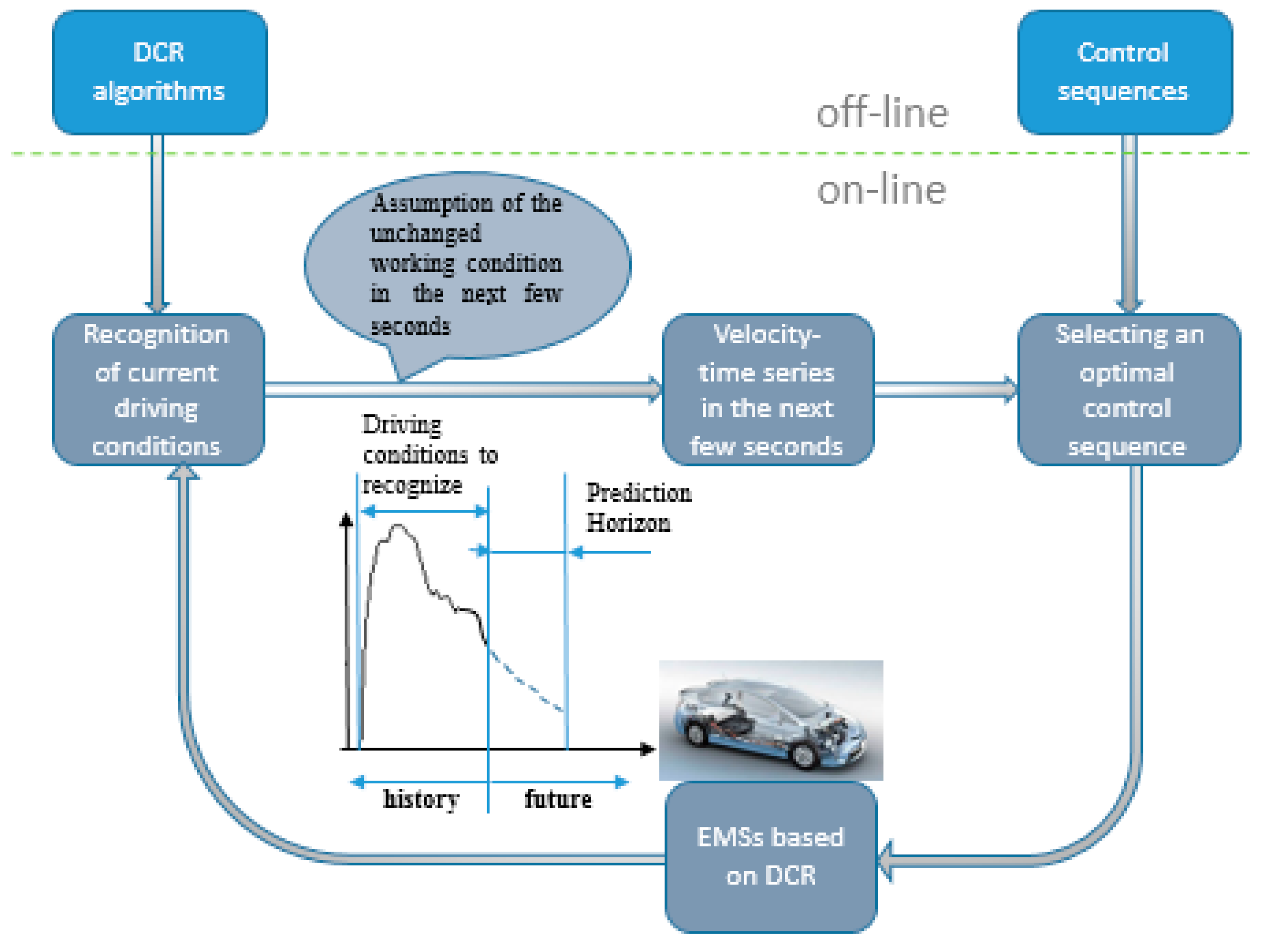
2. The Implementation Process of DCR-Based EMSs
- The loss of GPS signal due to adverse geographical locations such as high-rise buildings and tunnels, which results in discontinuous collection data;
- Abnormal points of acceleration and deceleration (the 100 km acceleration time of conventional cars is not less than 7 s, and the maximum deceleration speed of emergency braking is 7.5–8.0 m·s2);
- Abnormal data collected during a long-term shutdown;
- Intermittent low-travel speed in the long traffic jam (the maximum speed is less than 10.0 km/h) usually can be treated as idle speed. Generally, idling time exceeding 180 s is considered abnormal, and the maximum idling time is 180 s.
- The interpolation method is used to make up for loss signal;
- Abnormal points of acceleration and deceleration are usually detected by the maximum acceleration value in normal circumstances and the deceleration value of emergency braking, respectively;
- Idle speed data and data during a long-term shutdown should be deleted.
3. Several Algorithms for Driving Condition Recognition
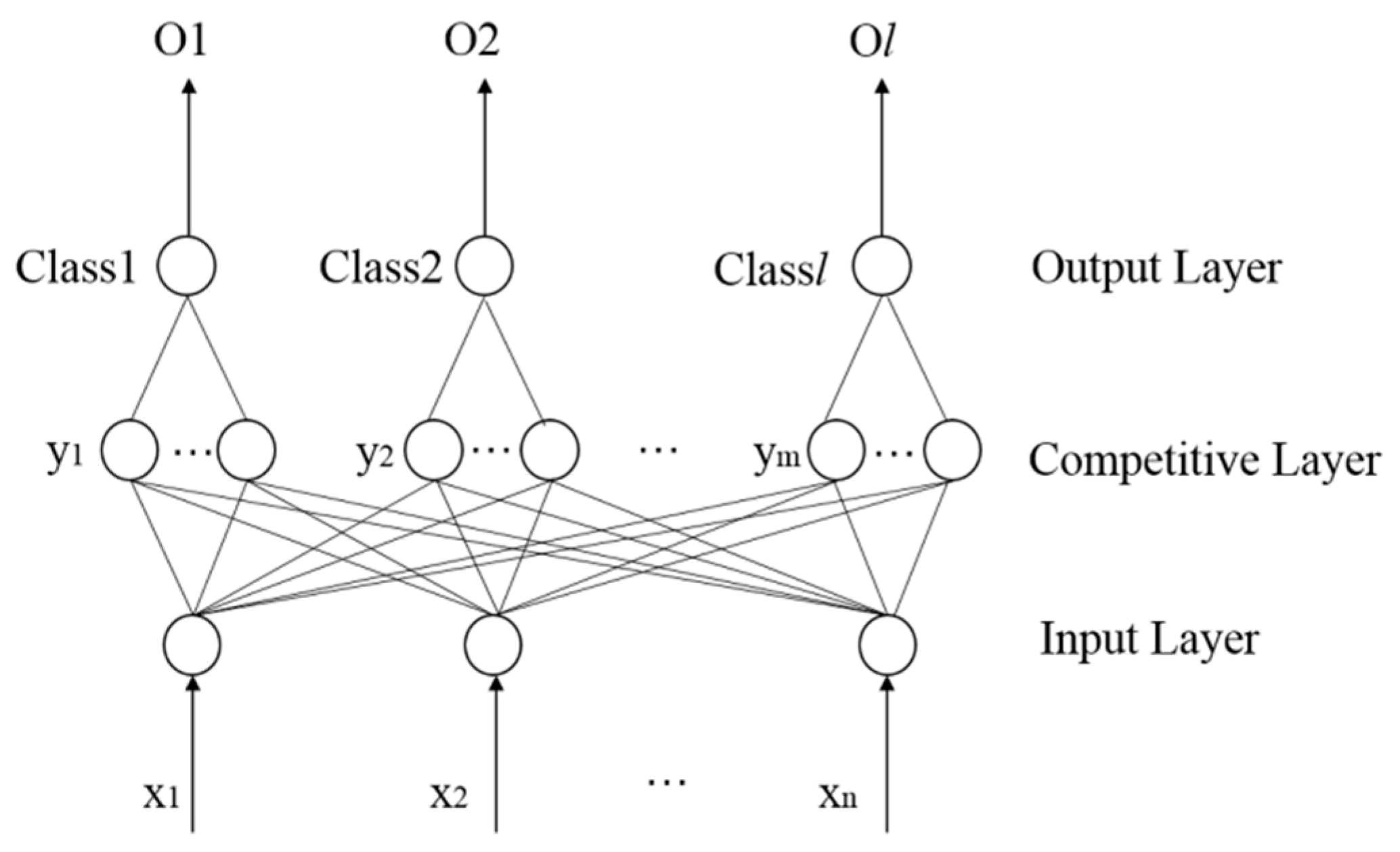
3.1. DCR Based on LVQ Neural Network
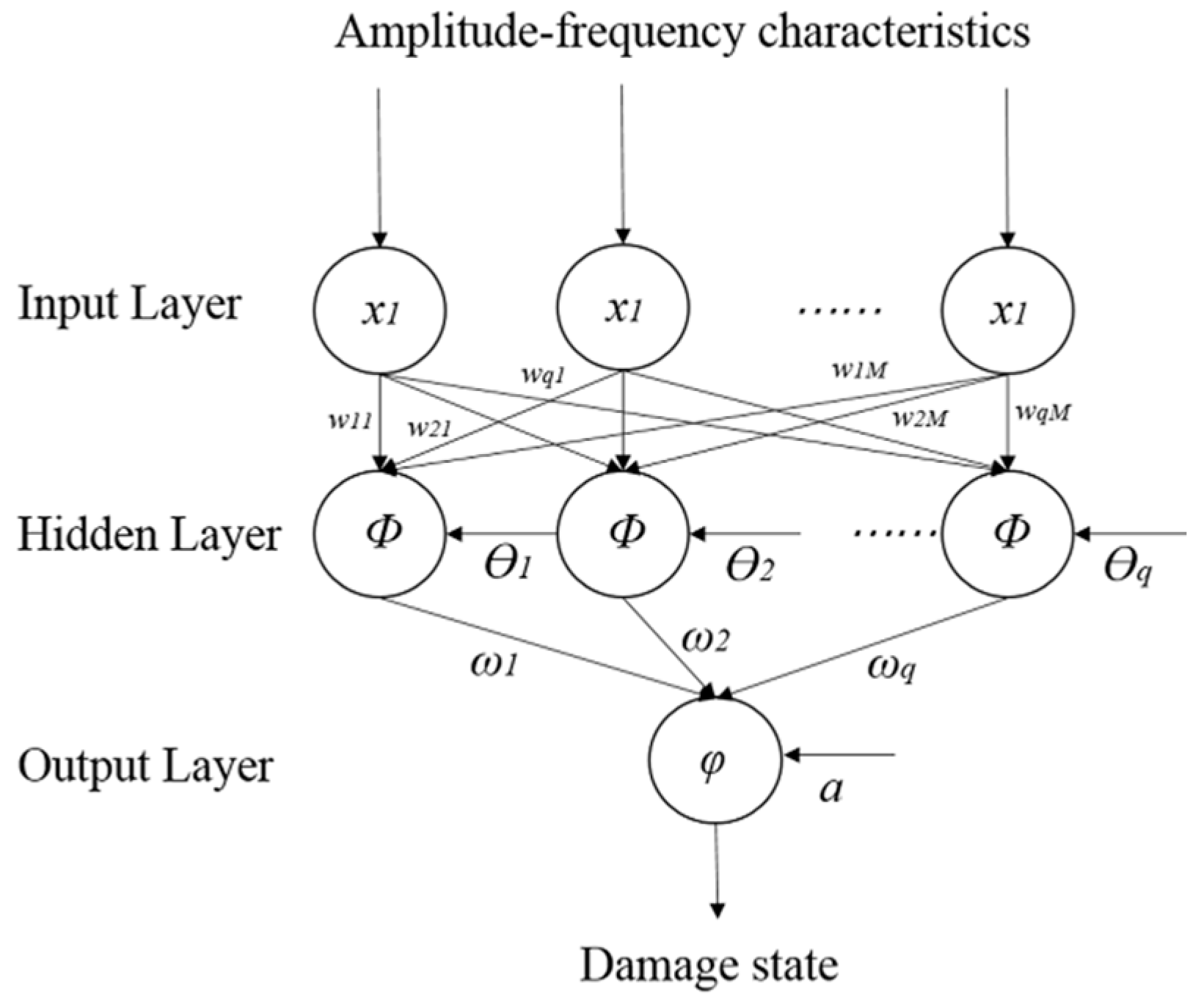
3.2. DCR Based on BP Neural Network
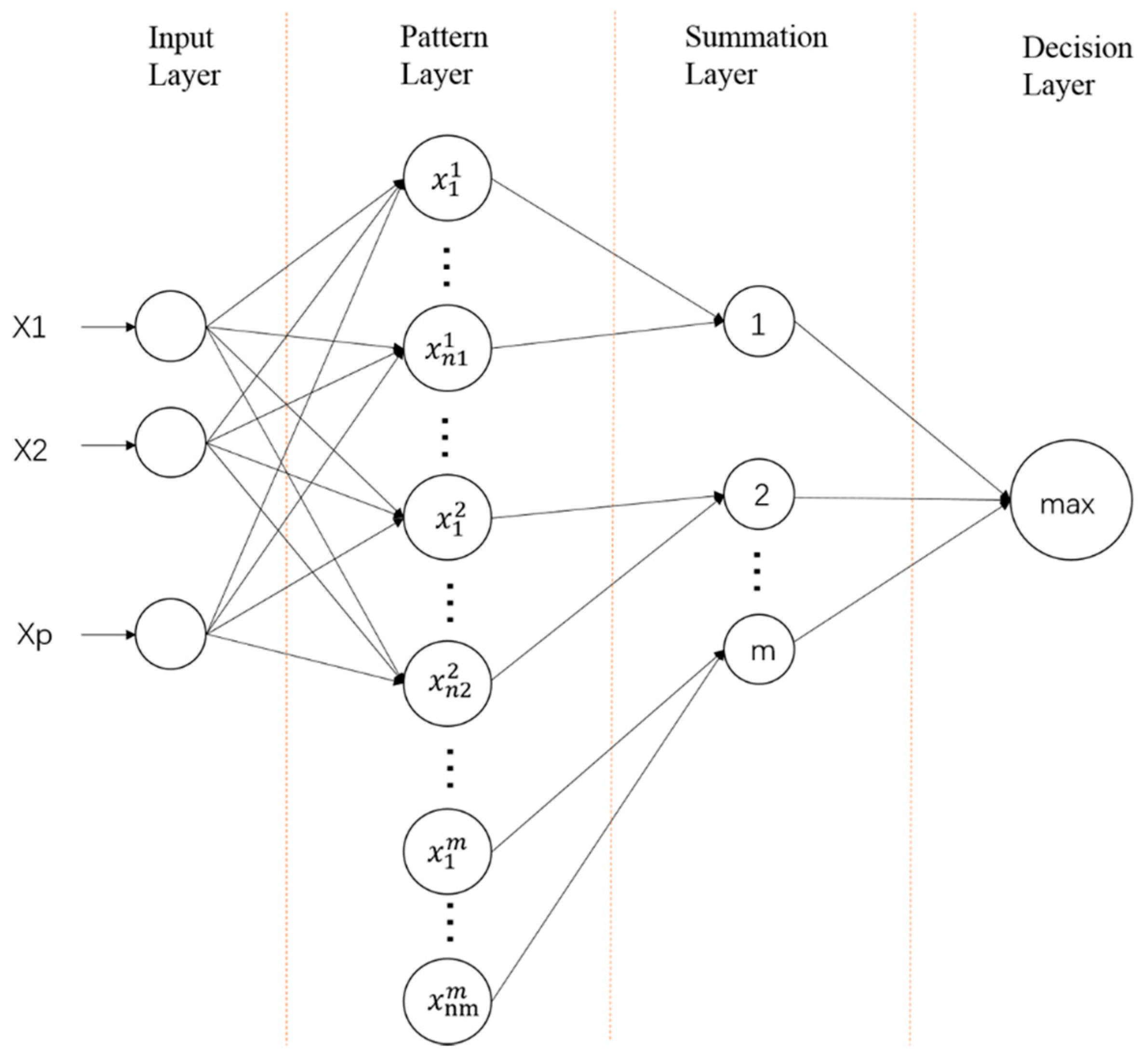
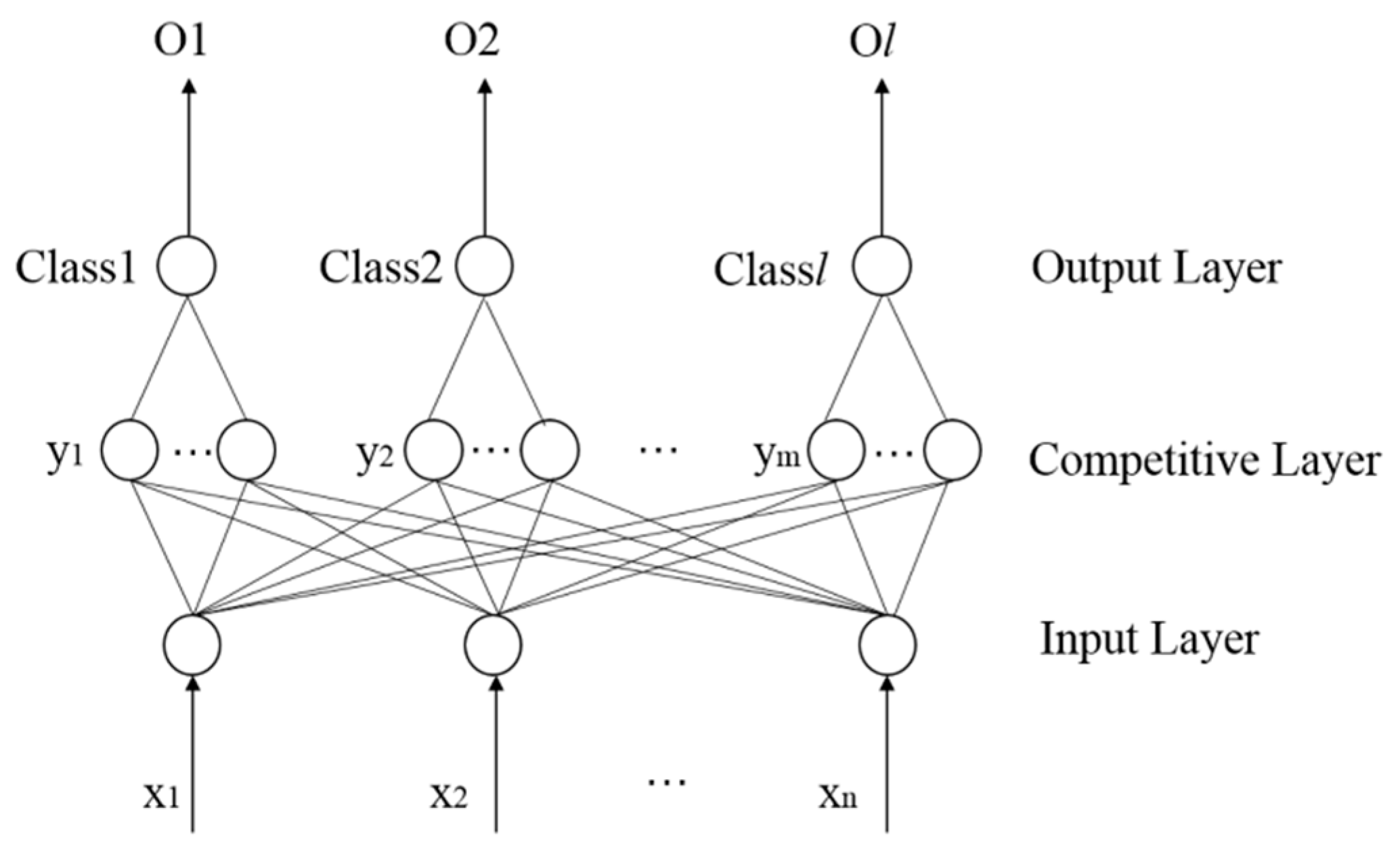
3.3. DCR Based on PNN
3.4. DCR Based on Fuzzy Reasoning
3.5. DCR Based on Cluster Analysis
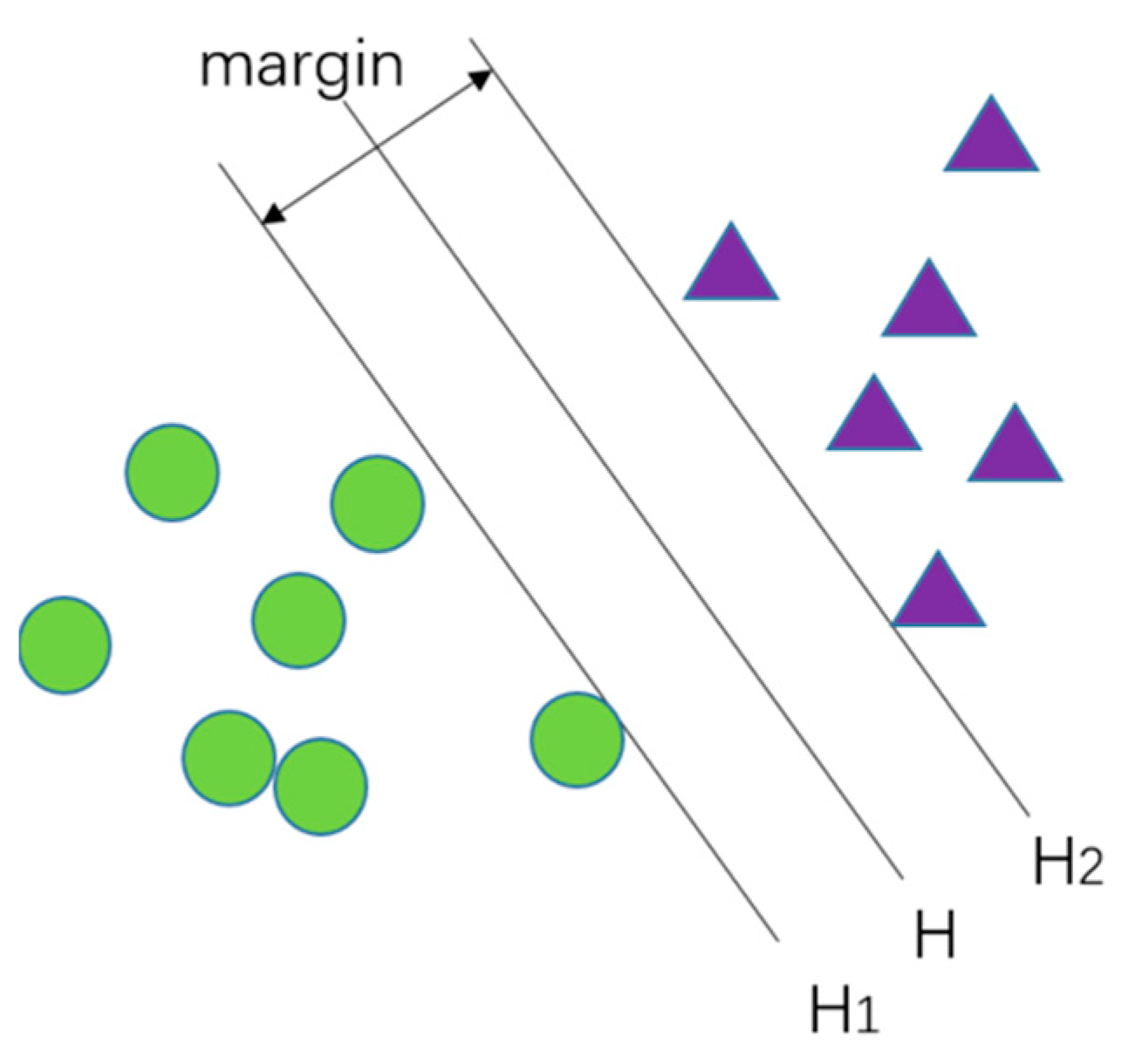
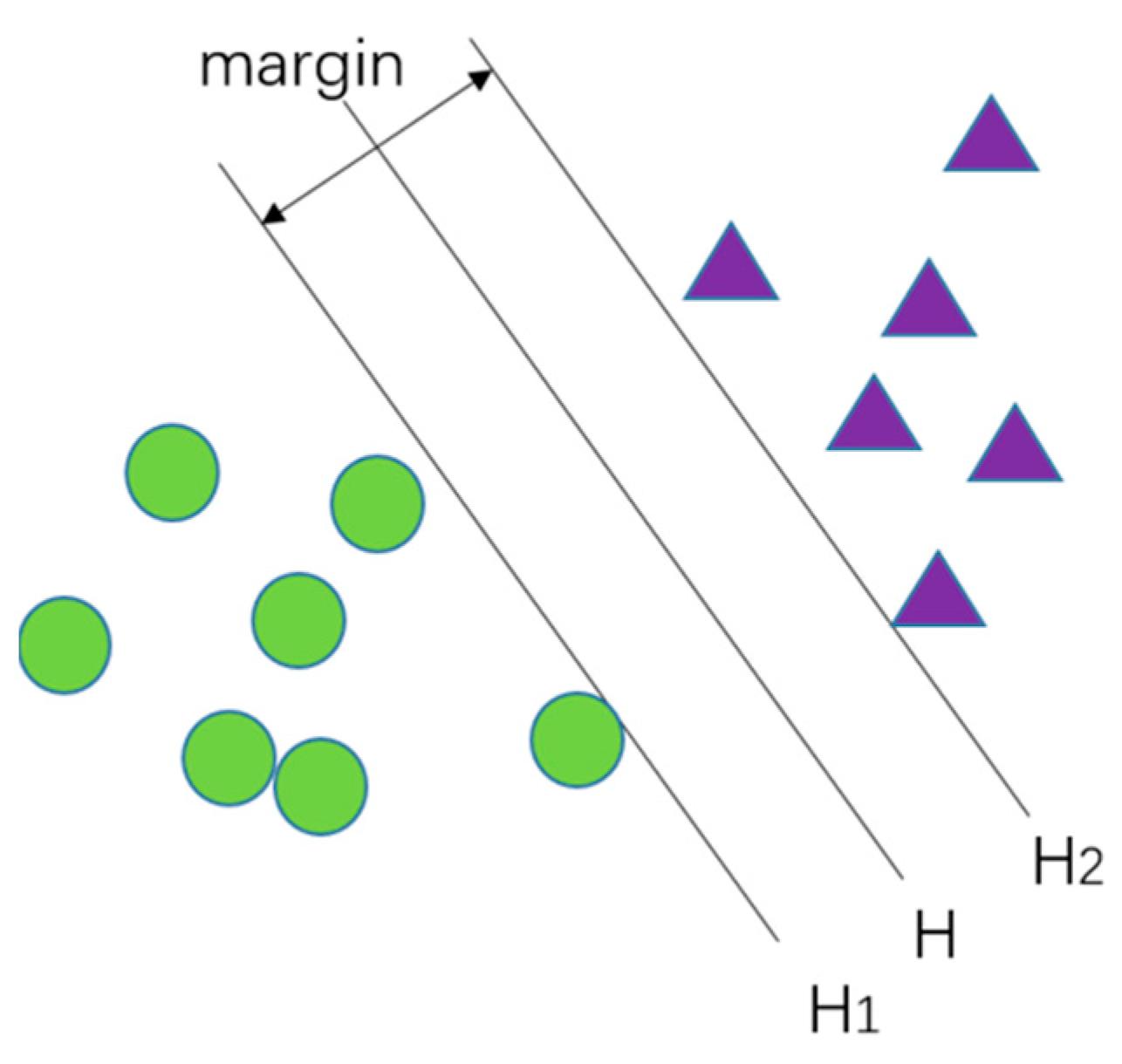
3.6. DCR Based on SVM
3.7. Other Identification Methods of Working Conditions
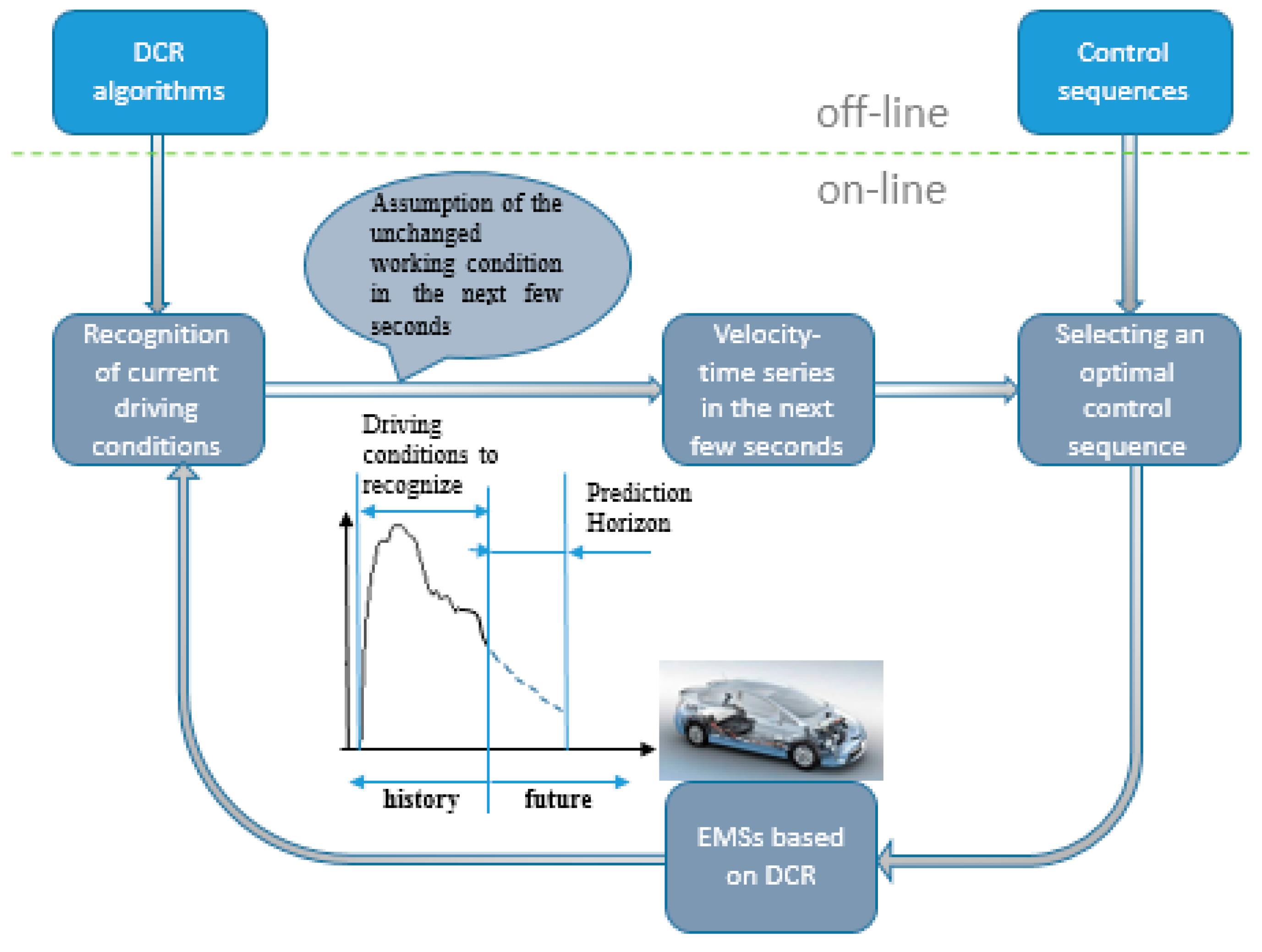
4. The Application of DCR in EMSs of PHEVs
5. Issues and Challenges
5.1. The Recognition Windows Settings
5.2. The Methods for DCR
5.3. Utilization of Intelligent Transportation Systems (ITS)
5.4. Multi-Objective Optimization
6. Conclusions
- Explore better methods for recognition-windows settings;
- Explore the optimal method for DCR;
- Develop and apply ITS for efficient PHEV control;
- Study EMSs for the multi-objective optimization problem.
Author Contributions
Funding
Conflicts of Interest
References
- Banvait, H.; Anwar, S.; Chen, Y. A rule-based energy management strategy for plug-in hybrid electric vehicle (PHEV). In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 3938–3943. [Google Scholar]
- Shen, Y.; Ge, G.; Liu, A.; Zheng, Z. Operation of an ICE/PM/TTRB APU in a Range Extender Electric Vehicle Power-Train. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies-Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 3205–3210. [Google Scholar]
- Li, Q.; Chen, W.; Li, Y.; Liu, S.; Huang, J. Energy management strategy for fuel cell/battery/ultracapacitor hybrid vehicle based on fuzzy logic. Int. J. Electr. Power Energy Syst. 2012, 43, 514–525. [Google Scholar] [CrossRef]
- Jun, L.; Faming, Z.; Xiong, T.; Biao, L.; Wenbin, W. Simulation research on PHEV based on fuzzy logic control strategies. J. Chongqing Jiaotong Univ. 2013, 2, 329–334. [Google Scholar]
- Sabri, M.F.M.; Danapalasingam, K.A.; Rahmat, M.F.a. Improved fuel economy of through-the-road hybrid electric vehicle with fuzzy logic-based energy management strategy. Int. J. Fuzzy Syst. 2018, 20, 2677–2692. [Google Scholar] [CrossRef]
- Denis, N.; Dubois, M.R.; Desrochers, A. Fuzzy-based blended control for the energy management of a parallel plug-in hybrid electric vehicle. IET Intell. Transp. Syst. 2015, 9, 30–37. [Google Scholar] [CrossRef]
- Li, P.; Li, Y.; Wang, Y.; Jiao, X. An intelligent logic rule-based energy management strategy for power-split plug-in hybrid electric vehicle. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July; pp. 7668–7672.
- Serrao, L.; Onori, S.; Rizzoni, G. A comparative analysis of energy management strategies for hybrid electric vehicles. J. Dyn. Sys. Meas. Control 2011, 133, 31012. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Chen, Y.; Li, W.; Shang, F.; Zhan, J. Hybrid-trip-model-based energy management of a PHEV with computation-optimized dynamic programming. IEEE Trans. Veh. Technol. 2017, 67, 338–353. [Google Scholar] [CrossRef]
- Chen, Z.; Mi, C.C.; Xu, J.; Gong, X.; You, C. Energy management for a power-split plug-in hybrid electric vehicle based on dynamic programming and neural networks. IEEE Trans. Veh. Technol. 2013, 63, 1567–1580. [Google Scholar] [CrossRef]
- Gong, Q.; Li, Y.; Peng, Z.-R. Trip based optimal power management of plug-in hybrid electric vehicles using gas-kinetic traffic flow model. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 3225–3230. [Google Scholar]
- Du, W.; Zhao, S.; Jin, L.; Gao, J.; Li, H. Parameter optimization of rule-based control strategy for multi-mode hybrid electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 2706–2716. [Google Scholar] [CrossRef]
- Zhang, F.; Hu, X.; Xu, K.; Tang, X.; Cui, Y. Research status and prospect of energy management based on model prediction for hybrid electric vehicles. Chin. J. Mech. Eng.-Engl. 2019, 55, 86–108. [Google Scholar] [CrossRef] [Green Version]
- Lin, C.-C.; Peng, H.; Grizzle, J. A stochastic control strategy for hybrid electric vehicles. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004; pp. 4710–4715. [Google Scholar]
- Zhang, Y.; Guo, C.; Li, G.; Liu, Y.; Chen, Z. Cooperative control strategy for plug-in hybrid electric vehicles based on a hierarchical framework with fast calculation. J. Clean. Prod. 2020, 251, 119627. [Google Scholar] [CrossRef]
- Zeng, Y.; Cai, Y.; Kou, G.; Gao, W.; Qin, D. Energy management for plug-in hybrid electric vehicle based on adaptive simplified-ECMS. Sustainability 2018, 10, 2060. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Cai, Z.; Liu, S. Design of Real-Time Control Based on DP and ECMS for PHEVs. Math. Probl. Eng. 2021, 2021, 6667614. [Google Scholar] [CrossRef]
- Karbowski, D.; Kim, N.; Rousseau, A. Route-based online energy management of a PHEV and sensitivity to trip prediction. In Proceedings of the 2014 IEEE Vehicle Power and Propulsion Conference (VPPC), Coimbra, Portugal, 27–30 October 2014; pp. 1–6. [Google Scholar]
- Han, S.; Zhang, F.; Ren, Y.; Xi, J. Predictive Energy Management Strategies in Hybrid Electric Vehicles Using Hybrid Deep Learning Networks. China J. Highw. Transp. 2020, 33, 1–9. [Google Scholar]
- Hu, H. Research on Energy Management Strategy for Plug-in Hybrid Electric Vehicle Based on Reinforcement Learning; Kunming University of Science and Technology: Kunming, China, 2020. [Google Scholar]
- Xie, S.; Hu, X.; Qi, S.; Lang, K. An artificial neural network-enhanced energy management strategy for plug-in hybrid electric vehicles. Energy 2018, 163, 837–848. [Google Scholar] [CrossRef] [Green Version]
- Feng, Y.; Dong, Z. Optimal energy management with balanced fuel economy and battery life for large hybrid electric mining truck. J. Power Sources 2020, 454, 227948. [Google Scholar] [CrossRef]
- Yang, S.; Shan, Z.; Ding, Y.; Li, G. The Research Status and Prospects of Deep Reinforcement Learning. Comput. Eng. 2021, 41, 1–18. [Google Scholar] [CrossRef]
- Qi, X.; Luo, Y.; Wu, G.; Boriboonsomsin, K.; Barth, M. Deep reinforcement learning enabled self-learning control for energy efficient driving. Transp. Res. Part C Emerg. Technol. 2019, 99, 67–81. [Google Scholar] [CrossRef]
- Ma, Z.; Huo, Q.; Zhang, T.; Hao, J.; Wang, W. Deep Deterministic Policy Gradient Based Energy Management Strategy for Hybrid Electric Tracked Vehicle With Online Updating Mechanism. IEEE Access 2021, 9, 7280–7292. [Google Scholar] [CrossRef]
- Huang, R.; He, H.; Meng, X.; Li, M. A Novel Hierarchical Predictive Energy Management Strategy for Plug-in Hybrid Electric Bus Combined with Deep Reinforcement Learning. In Proceedings of the 2021 International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), Mauritius, Mauritius, 7–8 October 2021; pp. 1–5. [Google Scholar]
- Vadamalu, R.S.; Beidl, C. Online MPC based PHEV Energy Management using conic interior-point methods. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 466–471. [Google Scholar]
- Jinquan, G.; Hongwen, H.; Jiankun, P.; Nana, Z. A novel MPC-based adaptive energy management strategy in plug-in hybrid electric vehicles. Energy 2019, 175, 378–392. [Google Scholar] [CrossRef]
- He, H.; Wang, Y.; Han, R.; Han, M.; Bai, Y.; Liu, Q. An improved MPC-based energy management strategy for hybrid vehicles using V2V and V2I communications. Energy 2021, 225, 120273. [Google Scholar] [CrossRef]
- Sharma, V.; Purwar, S. Nonlinear controllers for a light-weighted all-electric vehicle using Chebyshev neural network. Int. J. Veh. Technol. 2014, 2014, 867209. [Google Scholar] [CrossRef]
- Montazeri-Gh, M.; Mahmoodi-K, M. Optimized predictive energy management of plug-in hybrid electric vehicle based on traffic condition. J. Clean. Prod. 2016, 139, 935–948. [Google Scholar] [CrossRef]
- Jeon, S.-I.; Jo, S.-T.; Park, Y.-I.; Lee, J.-M. Multi-mode driving control of a parallel hybrid electric vehicle using driving pattern recognition. J. Dyn. Sys. Meas. Control 2002, 124, 141–149. [Google Scholar] [CrossRef]
- Li, N. The Construction and Study of Vehicle Driving Cycle Based on Urban Road; Hebei Agricultural University: Baoding, China, 2013. [Google Scholar]
- Fu, X. Research on Parameter Optimized Matching and Energy Management Strategy for Hybrid Electric Vehicle; Shandong University: Jinan, China, 2015. [Google Scholar]
- Ba, M. Research on the Control Strategy of Plug-in Hybrid Electric Vehicle Based on Multi-Condition Optimization; Jilin University: Changchun, China, 2018. [Google Scholar]
- Guo, J.; Jiang, H.; Lei, S.; Zhong, Z.; Zuo, H.; Xu, J. Vehicle driving cycle construction method of urban roads. J. Traffic Transport. Eng. 2020, 20, 197–209. [Google Scholar]
- Zhang, Y.; Su, X.; Gao, G.; Shang, Y. Driving Conditions of a Car Based on Improved Principal Component and K-means Clustering Algorithm. Sci. Technol. Eng. 2021, 21, 3199–3205. [Google Scholar]
- CAO, Q.; LI, J.; LIU, Y.; QU, D.-w. Construction of driving cycle based on big data and markov chain. J. Northeast. Univ. 2019, 40, 77. [Google Scholar]
- Zhan, S. Energy Management Strategy of Hybrid Electric Vehicle Based on the Recognition of Driving Cycle and Driving Style. Ph.D. Thesis, Chongqing University, Chongqing, China, 2016. [Google Scholar]
- Zhang, J.; Wang, Z.; Liu, P.; Zhang, Z.; Li, X.; Qu, C. Driving cycles construction for electric vehicles considering road environment: A case study in Beijing. Appl. Energy 2019, 253, 113514. [Google Scholar] [CrossRef]
- Sun, W.; Rong, J.; Wang, J.; Xu, J.; Lv, S.; Liu, L. Research on the Construction Method of Urban Compound Driving Cycle with Curved Road Information. Automot. Eng. 2021, 43, 1519–1527. [Google Scholar] [CrossRef]
- Huang, X.; Tan, Y.; He, X. An intelligent multifeature statistical approach for the discrimination of driving conditions of a hybrid electric vehicle. IEEE Trans. Intell. Transp. Syst. 2010, 12, 453–465. [Google Scholar] [CrossRef]
- Pinkowski, B. Principal component analysis of speech spectrogram images. Pattern Recognit. 1997, 30, 777–787. [Google Scholar] [CrossRef]
- Guo, S.; Wu, K.; Zhang, G. Application of PCA-K-means++ combination model to construction of light vehicle driving conditions in intelligent traffic. J. Meas. Eng. 2020, 8, 107–121. [Google Scholar] [CrossRef]
- Qin, S.; Yubo, Z.; Ping, J. A research on driving cycle of city roads based on micro-trips. Automot. Eng. 2011, 33, 256–261. [Google Scholar]
- Chen, Y. Study on Control Strategy of Hybrid Electric Vehicle Based on Working Condition Recognition; Shandong University: Jinan, China, 2017. [Google Scholar]
- Jiang, T. Research on Control Strategy for the Plug-in Hybrid Electric Vehicle Based on Driving Cycle Identification; Hefei University of Technology: Hefei, China, 2018. [Google Scholar]
- Gao, J.; Zhang, L.; Sun, Z.; Xi, J. The of Control strategy optimization of Plug-in Hybrid Electric Vehicle based on driving cycles. Chin. J. Mech. Eng. 2017, 28, 1770–1777. [Google Scholar]
- Zhong, Y. Hybrid Electric Vehicle Considering Different Road Spectrum and Driving Style; Shandong University: Jinan, China, 2019. [Google Scholar]
- Fotouhi, A.; Yusof, R.; Rahmani, R.; Mekhilef, S.; Shateri, N. A review on the applications of driving data and traffic information for vehicles’ energy conservation. Renew. Sustain. Energy Rev. 2014, 37, 822–833. [Google Scholar] [CrossRef]
- Song, K.; Li, F.; Hu, X.; He, L.; Niu, W.; Lu, S.; Zhang, T. Multi-mode energy management strategy for fuel cell electric vehicles based on driving pattern identification using learning vector quantization neural network algorithm. J. Power Source 2018, 389, 230–239. [Google Scholar] [CrossRef]
- Lin, C.-C.; Jeon, S.; Peng, H.; Lee, J.M. Driving pattern recognition for control of hybrid electric trucks. Veh. Syst. Dyn. 2004, 42, 41–58. [Google Scholar] [CrossRef] [Green Version]
- Montazeri-Gh, M.; Fotouhi, A. Traffic condition recognition using the k-means clustering method. Sci. Iran. 2011, 18, 930–937. [Google Scholar] [CrossRef] [Green Version]
- Xie, H.; Tian, G.; Du, G.; Huang, Y.; Chen, H.; Zheng, X.; Luan, T.H. A hybrid method combining Markov prediction and fuzzy classification for driving condition recognition. IEEE Trans. Veh. Technol. 2018, 67, 10411–10424. [Google Scholar] [CrossRef]
- Pham, D.; Otri, S.; Ghanbarzadeh, A.; Koc, E. Application of the bees algorithm to the training of learning vector quantisation networks for control chart pattern recognition. In Proceedings of the 2006 2nd International Conference on Information & Communication Technologies, Damascus, Syria, 24–28 April 2006; pp. 1624–1629. [Google Scholar]
- Kohonen, T. Learning Vector Quantization; Springer Press: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Lancini, R.; Perego, F.; Tubaro, S. Neural network approach for adaptive vector quantization. In Proceedings of the ICASSP-92: 1992 IEEE International Conference on Acoustics, Speech, and Signal Processing, San Francisco, CA, USA, 23–26 March 1992; pp. 389–392. [Google Scholar]
- Biehl, M.; Ghosh, A.; Hammer, B. Learning vector quantization: The dynamics of winner-takes-all algorithms. Neurocomputing 2006, 69, 660–670. [Google Scholar] [CrossRef]
- Seo, S.; Obermayer, K. Soft learning vector quantization. Neural Comput. 2003, 15, 1589–1604. [Google Scholar] [CrossRef] [PubMed]
- Ghosh, A.; Biehl, M.; Hammer, B. Performance analysis of LVQ algorithms: A statistical physics approach. Neural Netw. 2006, 19, 817–829. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, B.; Chen, Q.; Wang, Z.; Hu, Y. The Rearch on Improved LVQ Neural Network Method. In Proceedings of the 2019 3rd International Conference on Circuits, System and Simulation (ICCSS), Nanjing, China, 13–15 June 2019; pp. 206–209. [Google Scholar]
- He, H.; Sun, C.; Zhang, X. A method for identification of driving patterns in hybrid electric vehicles based on a LVQ neural network. Energies 2012, 5, 3363–3380. [Google Scholar] [CrossRef]
- Wang, J.; Wang, Q.; Zeng, X.; Wang, P.; Wang, J. Driving cycle recognition neural network algorithm based on the sliding time window for hybrid electric vehicles. Int. J. Automot. Technol. 2015, 16, 685–695. [Google Scholar] [CrossRef]
- Li, J.; Cheng, J.-h.; Shi, J.-y.; Huang, F. Brief introduction of back propagation (BP) neural network algorithm and its improvement. In Advances in Computer Science and Information Engineering; Springer: Berlin/Heidelberg, Germany, 2012; pp. 553–558. [Google Scholar]
- Wang, F. Research On Mechanism and application of BP neural network. Sci. Tech. Innov. Her. 2020, 17, 150–151. [Google Scholar]
- Geng, X.; Lu, S.; Jiang, M.; Sui, Q.; Lv, S.; Xiao, H.; Jia, Y.; Jia, L. Research on FBG-based CFRP structural damage identification using BP neural network. Photonic Sens. 2018, 8, 168–175. [Google Scholar] [CrossRef] [Green Version]
- Jin, W.; Li, Z.J.; Wei, L.S.; Zhen, H. The improvements of BP neural network learning algorithm. In Proceedings of the WCC 2000-ICSP 2000, 2000 5th International Conference on Signal Processing Proceedings, 16th World Computer Congress 2000, Beijing, China, 21–25 August 2000; pp. 1647–1649. [Google Scholar]
- Zhang, Q.; Fu, X. A Neural Network Fuzzy Energy Management Strategy for Hybrid Electric Vehicles Based on Driving Cycle Recognition. Appl. Sci. 2020, 10, 696. [Google Scholar] [CrossRef] [Green Version]
- Zhang, P.; Wu, X.; Du, C.; Xu, H.; Wang, H. Adaptive Equivalent Consumption Minimization Strategy for Hybrid Heavy-Duty Truck Based on Driving Condition Recognition and Parameter Optimization. Energies 2020, 13, 5407. [Google Scholar] [CrossRef]
- Jiang, T. Research on Adaptive Equivalent Fuel Consumption Minimum Energy Management Strategy of PHEV Based on Driving Condition Recognition. Master’s Thesis, Hefei University of Technology, Hefei, China, 2019. [Google Scholar]
- Mohebali, B.; Tahmassebi, A.; Meyer-Baese, A.; Gandomi, A.H. Probabilistic neural networks: A brief overview of theory, implementation, and application. Handb. Probabilistic Models 2020, 347–367. [Google Scholar]
- Wu, S.G.; Bao, F.S.; Xu, E.Y.; Wang, Y.-X.; Chang, Y.-F.; Xiang, Q.-L. A leaf recognition algorithm for plant classification using probabilistic neural network. In Proceedings of the 2007 IEEE International Symposium on Signal Processing and Information Technology, Giza, Egypt, 15–18 December 2018; pp. 11–16. [Google Scholar]
- Wang, J.-S.; Chiang, W.-C.; Hsu, Y.-L.; Yang, Y.-T.C. ECG arrhythmia classification using a probabilistic neural network with a feature reduction method. Neurocomputing 2013, 116, 38–45. [Google Scholar] [CrossRef]
- Li, L.-l.; Chen, K.; Gao, J.-m.; Li, H. Research on Quality Anomaly Recognition Method Based on Optimized Probabilistic Neural Network. Shock Vib. 2020, 2020, 6694732. [Google Scholar] [CrossRef]
- Di, W.; Wang, M.; Sun, X.; Kang, F.; Xing, H.; Zheng, H.; Bian, J. Identification of rock bolt quality based on improved probabilistic neural network. Int. J. Model. Identif. Control 2018, 30, 105–117. [Google Scholar] [CrossRef]
- Hu, J.; Hu, Z.; Niu, X.; Bai, Q. Research on energy management strategy considering battery life for plug-in hybrid electric vehicle. Adv. Mech. Eng. 2018, 10, 1687814018797766. [Google Scholar] [CrossRef]
- Bai, Q. Study on Energy Management Strategy for Plug-in Hybrid Electrical Vehicle; Chongqing University: Chongqing, China, 2016. [Google Scholar]
- Czabański, R.; Jeżewski, J.; Horoba, K.; Jeżewski, M. Fetal state assessment using fuzzy analysis of fetal heart rate signals—Agreement with the neonatal outcome. Biocybern. Biomed. Eng. 2013, 33, 145–155. [Google Scholar] [CrossRef]
- Shukla, P.K.; Tripathi, S.P. On the design of interpretable evolutionary fuzzy systems (I-EFS) with improved accuracy. In Proceedings of the 2012 International Conference on Computing Sciences, Phagwara, India, 14–15 September 2012; pp. 11–14. [Google Scholar]
- Cai, K.-Y.; Zhang, L. Fuzzy reasoning as a control problem. IEEE Trans. Fuzzy Syst. 2008, 16, 600–614. [Google Scholar]
- Yang, S. Study on Driving Control Strategy For Plug-in Hybrid Electrical Vehicle Based on Mode Selection of Driver; Jilin University: Changchun, China, 2015. [Google Scholar]
- Zhou, W. Research on Control Strategy of Plug-in Hybrid Electric Vehicle; Jiangsu University: Zhenjiang, China, 2017. [Google Scholar]
- Cordero, J.; Aguilar, J.; Aguilar, K.; Chávez, D.; Puerto, E. Recognition of the driving style in vehicle drivers. Sensors 2020, 20, 2597. [Google Scholar] [CrossRef] [PubMed]
- Saleh, M.; Aljaafreh, A.; Albdour, N. Fuzzy-based recognition model for driving styles. IJEECS Int. J. Electr. Electron. Comput. Syst. 2013, 16, 816–819. [Google Scholar]
- Wu, H.; Li, Y.; Wu, C.; Ma, Z.; Zhou, H. A longitudinal minimum safety distance model based on driving intention and fuzzy reasoning. In Proceedings of the 2017 4th International Conference on Transportation Information and Safety (ICTIS), Banff, AB, Canada, 8–10 August 2017; pp. 158–162. [Google Scholar]
- Karypis, G.; Han, E.; Kumar, V. A Hierarchical Clustering Algorithm Using Dynamic Modeling; Department of Computer Science and Engineering University of Minnesota: Minneapolis, MN, USA, 1999. [Google Scholar]
- Ester, M.; Kriegel, H.-P.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2–4 August 1996; pp. 226–231. [Google Scholar]
- Wang, W.; Yang, J.; Muntz, R. STING: A Statistical Information Grid Approach to Spatial Data Mining; Department of Computer Science, University of California: Los Angeles, CA, USA, 1997. [Google Scholar]
- Lv, J.; Niu, L.; Qin, Z.; Zhou, Y.; Zhu, H. Driving Conditions Recognition and Parameters Optimization of Parallel HEVs. J. Anhui Uni. Technol.-Nat. Sci. 2018, 35, 232–239+255. [Google Scholar]
- Liu, X. Instantaneous Optimal Control Strategy Based on a Variable Equivalent Factor for a Parallel Hybrid Electric Vehicle; Henan University Of Science And Technology: Luoyang, China, 2018. [Google Scholar]
- Xie, H.; Tian, G.; Chen, H.; Wang, J.; Huang, Y. A distribution density-based methodology for driving data cluster analysis: A case study for an extended-range electric city bus. Pattern Recognit. 2018, 73, 131–143. [Google Scholar] [CrossRef]
- Bu, G. Research of Energy Management Strategy for Plug-in Hybrid Electric Vehicles; Shandong University: Jinan, China, 2011. [Google Scholar]
- Guo, G.; Wu, X.; Zhuo, S.; Xu, P.; Xu, G.; Cao, B. Prediction state of charge of Ni-MH battery pack using support vector machines for hybrid electric vehicles. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008; pp. 1–4. [Google Scholar]
- Smits, G.F.; Jordaan, E.M. Improved SVM regression using mixtures of kernels. In Proceedings of the 2002 International Joint Conference on Neural Networks; IJCNN’02 (Cat. No. 02CH37290), Honolulu, HI, USA, 12–17 May 2002; pp. 2785–2790. [Google Scholar]
- Zhang, X.; Wu, G.; Dong, Z.; Crawford, C. Embedded feature-selection support vector machine for driving pattern recognition. J. Frankl. Inst. 2015, 352, 669–685. [Google Scholar] [CrossRef]
- Li, Y.; Chen, M.; Lu, X.; Zhao, W. Research on optimized GA-SVM vehicle speed prediction model based on driver-vehicle-road-traffic system. Sci. China Technol. Sci. 2018, 61, 782–790. [Google Scholar] [CrossRef]
- Zhang, Q. Research on Energy Optimization Management Strategy of Parallel Plug-In Hybrid Electric Vehicle; Yanshan University: Qinhuangdao, China, 2020. [Google Scholar]
- Lu, G. The Study of Control Strategy for PHEV Based on Traveling Mileage Prediction; Jilin University: Changchun, China, 2017. [Google Scholar]
- Hailong, G.; Yi, W. Study on HEV’s driving condition recognition method based on PSO algorithm. J. Intell. Fuzzy Syst. 2018, 35, 87–98. [Google Scholar] [CrossRef]
- Li, P.; Jiao, X.; Li, Y. Adaptive real-time energy management control strategy based on fuzzy inference system for plug-in hybrid electric vehicles. Control Eng. Pract. 2021, 107, 104703. [Google Scholar] [CrossRef]
- Ivanco, A.; Colin, G.; Chamaillard, Y.; Charlet, A.; Higelin, P. Energy management strategies for a pneumatic-hybrid engine based on sliding window pattern recognition. Oil Gas Sci. Technol.—Rev. De L’institut Français Du Pétrole 2010, 65, 179–190. [Google Scholar] [CrossRef]
- Yang, J.; Huang, X.; Tan, Y.; He, X. Forecast of driving load of hybrid electric vehicles by using discrete cosine transform and support vector machine. In Proceedings of the 2008 IEEE International Joint Conference on Neural Networks (IEEE World Congress on Computational Intelligence), Hong Kong, 1–8 June 2008; pp. 2227–2234. [Google Scholar]
- Gao, J.; Zhu, H.; Murphey, Y.L. Adaptive Window Size Based Deep Neural Network for Driving Maneuver Prediction. In Proceedings of the 2020 Chinese Control And Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 87–92. [Google Scholar]
- Lin, Y.; Wang, P.; Ma, M. Intelligent transportation system (ITS): Concept, challenge and opportunity. In Proceedings of the 2017 IEEE 3rd International Conference on Big Data Security on Cloud (Bigdatasecurity), IEEE International Conference on High Performance and Smart Computing (HPSC), and IEEE International Conference on Intelligent Data and Security (IDS), Beijing, China, 26–28 May 2017; pp. 167–172. [Google Scholar]
- Sumalee, A.; Ho, H.W. Smarter and more connected: Future intelligent transportation system. Iatss Res. 2018, 42, 67–71. [Google Scholar] [CrossRef]
- Vanajakshi, L.; Subramanian, S.C.; Sivanandan, R. Travel time prediction under heterogeneous traffic conditions using global positioning system data from buses. IET Intell. Transp. Syst. 2009, 3, 1–9. [Google Scholar] [CrossRef]
- Qian, T.; Shao, C.; Wang, X.; Shahidehpour, M. Deep reinforcement learning for EV charging navigation by coordinating smart grid and intelligent transportation system. IEEE Trans. Smart Grid 2019, 11, 1714–1723. [Google Scholar] [CrossRef]
- Fu, J.; Yang, R.; Li, X.; Sun, X.; Li, Y.; Liu, Z.; Zhang, Y.; Sunden, B. Application of artificial neural network to forecast engine performance and emissions of a spark ignition engine. Appl. Therm. Eng. 2022, 201, 117749. [Google Scholar] [CrossRef]
- da Silva, S.F.; Eckert, J.J.; Silva, F.L.; Silva, L.C.; Dedini, F.G. Multi-objective optimization design and control of plug-in hybrid electric vehicle powertrain for minimization of energy consumption, exhaust emissions and battery degradation. Energy Convers. Manag. 2021, 234, 113909. [Google Scholar] [CrossRef]
- Gunantara, N. A review of multi-objective optimization: Methods and its applications. Cogent Eng. 2018, 5, 1502242. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Main Advantages | Main Disadvantages |
|---|---|---|
| LVQNN | High learning, adaptive and fault-tolerant ability Fast computation | Space waste and iteration time increase (Some neurons cannot be enabled) Accuracy: initial weights selected by experience |
| BPNN | High learning and fault-tolerant ability | Local minimization Slow convergence speed |
| PNN | Simple learning process Less training computation time High accuracy and fault-tolerant ability Escape from local optima | Accuracy: the spread value selected by experience The requirement of massive memory for operation |
| Fuzzy Reasoning | Simple learning process and strong robustness | Accuracy: the selection of membership degree mostly depends on experience |
| Cluster Analysis | Free from the constraint and interference of prior knowledge Clear division rules and fast convergence speed | Sensitive to abnormal data K value to be determined |
| SVM | Strong learning and generalization ability Wide comprehension Strong universality and robustness | Difficult implementation for large training pattern set and multi-classification problems |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Liu, Y. Energy Management Strategy for Plug-In Hybrid Electric Vehicles Based on Driving Condition Recognition: A Review. Electronics 2022, 11, 342. https://doi.org/10.3390/electronics11030342
Liu C, Liu Y. Energy Management Strategy for Plug-In Hybrid Electric Vehicles Based on Driving Condition Recognition: A Review. Electronics. 2022; 11(3):342. https://doi.org/10.3390/electronics11030342
Chicago/Turabian StyleLiu, Chunna, and Yan Liu. 2022. "Energy Management Strategy for Plug-In Hybrid Electric Vehicles Based on Driving Condition Recognition: A Review" Electronics 11, no. 3: 342. https://doi.org/10.3390/electronics11030342
APA StyleLiu, C., & Liu, Y. (2022). Energy Management Strategy for Plug-In Hybrid Electric Vehicles Based on Driving Condition Recognition: A Review. Electronics, 11(3), 342. https://doi.org/10.3390/electronics11030342