1. Introduction
Eigenvalue assignment on its own is the first approach one looks for when it comes to stabilization and control of a system’s growth or decay. To address issues such as shape of response, maintaining system robustness, and insensitivity, a need arises to involve the eigenvectors as well as the eigenvalues in system design.
The first introduction of eigenvalue-eigenvector assignment in shaping system response was given in [
1,
2]. We are focusing on a particular approach namely the eigenstructure assignment, known earlier as the entire-eigenstructure assignment. We refer the reader to some books on the subject matter [
3,
4], to a survey [
5], in addition to [
6].
Early works on eigenstructure assignment were conducted by [
1,
2]. They identified the freedom offered by state feedback in specifying the closed loop eigenvectors as well as the closed loop eigenvalues. In addition, they provided a characterization of all attainable eigenvectors associated with a given set of eigenvalues. Other early researchers were [
7,
8,
9,
10] who provided algorithms for obtaining such attainable sets of eigenvectors. Though state and output feedback eigenstructure assignment cannot change uncontrollable eigenvalues, their associated eigenvectors may be chosen to a certain extent to improve the insensitivity and the robustness of the closed-loop system [
11]. In a study by [
12], the theory of eigenstructure has been applied to more precisely shape the modes involved in a vibrating system. An extensive flight control example is treated in [
6]. A mention must be made of a book [
13] regarding the application of eigenstructure method to avionics. There, the author has shown that no more than
entries of any eigenvector can be chosen arbitrarily. A PhD thesis by [
14] investigated the application of eigenstructure assignment to aircraft problems. Furthermore, textbooks’ treatment of eigenstructure is well-explained in [
15,
16].
Recent applications to a three-axis dynamic flight motion simulator has been conducted in [
17]. The authors employed derivative PD state feedback together with a partial subset of the system eigenstructure. Both resulted in a simplified, more economical, and robust approach compared to the traditional eigenstructure approach. The case of large scale systems has been tackled by [
18]. Partial eigenstructure assignment was used to derive a new parametric solution. The solution method involved inverses of lower order matrices, resulting in computational load reduction. In [
19], the authors addressed a problem with output feedback, where only partial assignment is possible and a trade-off between sensitivity and stability should be exercised. Eigenstructure assignment methods for vibration cancellation and suppression in large space structures have been reviewed in [
20]. In particular, a method known as orthogonal eigenstructure has been found to offer significant simplification of the design task. It also facilitates some experience-based design. An approach based on multibody aircraft dynamics rather than the conventional rigid-body configuration has been studied in [
21]. The eigenstructure assignment proves a convenient approach since the differences between both types of aircraft are reflected in the eigenvalues and eigenvectors. Consequently, an implementation of a straightforward inner-loop control law accomplished desired aircraft requirements on damping and stiffness.
The eigenstructure method is now a well-established method for eigenvalue-eigenvector assignment using state and output feedback [
6]. It is characterized by a determination of an eligible
closed loop eigenvector
together with an
companion input-vector
. Both vectors result from a solution method based on the null space of a certain formulation of the feedback used. In its most simple form, the lumped solution is the null space solution of an augmented
matrix. Typically, the traditional eigenstructure method gives a lumped solution in the sense that both
and
are not independently obtained, but have be extracted out of a null space solution (an
vector), where
is extracted as the top
entries and
as the bottom
entries.
As a numerical value, the null space solution overshadows (conceals) the nature and structure of both and even after decomposing the solution into its constituent parts. Any additional structural information is therefore welcomed as it provides further insight together with additional characterization. Both help in improving intuition, in easing calculations, and in reducing problem dimensionality throughout both analysis and design stages. This task is undertaken by our treatment utilizing the concept of matrix adjugates. We shall interchangeably refer to our method as either the adjugate method or the admissible pair method, while referring to the traditional method as the null space method.
What distinguishes our approach is the fact that the adjugate of a matrix is unique leading to a naturally scaled admissible pair [
22,
23,
24,
25]. This is not the case with the usual eigenstructure method as the null space may differ in the values of its entries depending on the method used to determine it. MATLAB provides two approaches to determine the null space which give different answers in terms of the resulting numbers, though both are eligible and lie within the same solution space. From that perspective, our method provides standardization through formula based determination of both
and
. Such an approach reduces dimensionality and in the theoretical sense enables a form of parallelism.
The adjugate method deals with lower dimensional matrices. It involves matrix manipulation of order , in comparison to manipulation of matrices required by the null space method. The adjugate method accentuates the importance of the open loop characteristic polynomial overshadowed by many eigenvalue assignment methods. The role of is also demystified when adopting the admissible pair approach in the sense that it does not influence . This is not apparent when using the null-space method.
The adjugate method is convenient whenever dealing with matrices of special forms such as the companion form adopted by MATLAB as its default method for control system representation. It turns out that such a form together with the adjugate method provides direct immediate information related to the open loop system such as: stability, the characteristic polynomial, left and right eigenvectors, the derivative of with respect to . Most important, this form provides direct formula-based determination of the closed loop eigenvectors enhancing the explicitness of the adjugate method when it comes to distinct and repeatedly assigned eigenvalues together with their associated eigenvectors.
We begin our study in
Section 2 by briefing the eigenstructure involvement in shaping a system time response through left and right eigenvectors. We then outline two convenient approaches to the solution process through an admissible pair in
Section 3. We pay a visit to the determination of left and right eigenvectors from the matrix adjugate point of view in
Section 4. The core of our study is a formulation of the admissible pair through independent and explicit formula-based relations in
Section 5; together with insightful relevant remarks. The tools are matrix adjugates and the open loop characteristic polynomial. Matrix adjugates efficiently lend themselves to a companion form adopted by MATLAB. Such a form simplifies many issues related to open loop and closed loop eigenvector determination; being formalized in
Section 6. Extending the null space and a need for repetitive differentiation of the admissible pairs related to identical eigenvalues is proved in
Section 7 and shown to be systematic and straightforward. In case of blending between the adjugate and the null space method regarding mixed calculations, a conversion between the two is essential as discussed in
Section 8. Our investigation concludes with four examples; fully worked out to demonstrate and validate a number of conceptions introduced throughout the manuscript. The calculation and simulation tool is MATLAB.
Broadly, we summarize the contribution and novelty of our study as follows. The details are within the main body of the manuscript. All serve as advantageous features if compared to the traditional eigenstructure method.
Contributing independent determination of the two main parameters
, together with explicit determination of
, rendering our method a formula-based method (
Section 5).
A decoupled computation of the pair , thus enabling parallelism.
Highlighting an important role played by the usually overlooked open loop characteristic polynomial when it comes to closed loop eigenvalue assignment.
Presenting a particular matrix form which provides direct information regarding system structure, stability, and many other aspects of systems. Such form significantly eases the eigenvector assignment process (
Section 6).
Providing systematic determination of the closed loop generalized eigenvectors when dealing with repeated eigenvalue assignment (
Section 7).
Manipulating lower order matrices using the adjugate of a matrix.
Presenting three fully worked out examples to demonstrate the convenience of the adjugate method. Theory related to a commonly encountered electronic circuit is also treated in
Section 6. In addition, a practical application concerning a realistic system is presented in Example 4. It concerns a well-known industrial machine, namely the speed control of an armature control DC motor (
Section 9).
5. Formula-Based Approach to the Determination of the Admissible Pair
The null space method [
16,
24,
26] is a general purpose one; however, it is computationally the most demanding as it manipulates matrices of dimension
. Besides, it is not a direct method in the sense of not explicitly giving
and
, neither a formula-based method.
Averting such shortcomings is therefore favorable. Our approach based on matrix adjugates fulfills such ambition as proved below.
Proposition 1. Fornewly assigned (i.e., not already an eigenvalue of),is given by the open loop characteristic polynomial evaluated at the assigned eigenvalue. Furthermore, the associated closed loop eigenvectorsare given by
The solution
of (15) is, therefore, given by the null space of
. It remains the same solution as that of another matrix obtained by pre- multiplying (15) by any nonsingular matrix [
24,
27,
28]. Since
is nonsingular, its inverse is also nonsingular and therefore it qualifies as the pre-multiplying matrix, i.e., (15) has the same solution as the following system of equations [
27,
28].
which has the same solution as that of
The most simple solution is when
, giving
and
where
, are the coefficients of the open loop characteristic polynomial.
Both as in (20)–(21) are fundamental in our study and conveniently named an admissible pair.
Regarding the closed loop eigenvector , it is most simple, formula-based, taken directly without any concern to elaborate scaling. Regarding intuition, is justifiably interpreted as the open loop characteristic polynomial evaluated at the eigenvalue to be assigned. Besides, is also formula-based and is determined independently of . Note that when , is an column matrix.
Considerable use of (20) and (21) is expected in our treatment of the subject matter with regard to outlining system structure and easing numerical determinations. In addition, MATLAB is used to facilitate all the calculations needed through its readily available functions. We comment on the nature of the two functions, though we adhere to the use of one of them for comparison purposes. □
Remark 1.
- (i)
Annonzero square matrixcan have any rank betweenand, but the rank of its adjugate is either, or.
Proof.
If is nonsingular, its adjugate is nonsingular, thus of rank .
If
has rank
, the adjugate is identically a zero matrix as stated in [
23,
24].
We are left with
of rank
, which is singular, having a nontrivial null space given by the adjugate. Invoking the following standard theory in linear algebra [
23,
24]:
In our case,
, hence,
The importance of this remark is that the adjugate method can only give at most a single nonzero independent column when a matrix has rank as is the case in many assignment problems concerning eigenvalue reassignment or uncontrollable systems.
This implies that any reassigned eigenvalue using the adjugate method cannot give more than a single closed loop eigenvector even when . □
- (ii)
Ifis not an eigenvalue ofi.e., newly assigned, thenandcannot be zero andhas rank equal to.
Proof.
Since is not an eigenvalue of A, is nonsingular, implying is non-zero. Since then is non-zero.
Furthermore, using properties of matrix adjugates,
is nonsingular having rank
. Hence,
Therefore, the closed loop eigenvectors are nonzero and are in number. □
- (iii)
Abiding by our selection of the admissible pair as in (20) and (21),does not influence zi.
Proof.
Evident from ; obviously independent of .
This fact could not have been thought of while adhering to the null space method. The reason is that the solution given by that method is a lumped solution containing both and where does not address either or as explicitly as the adjugate method. By a lumped solution, we mean an vector where is extracted as the top components and as the bottom components. □
- (iv)
A Procedure for Shaping the Closed Loop Eigenvectors.
Having settled on desired ratios between no more than
components of the closed loop eigenvectors [
13], determine a
matrix. To do that, obtain a square
matrix using the corresponding rows from the
matrix initially determined.
To illustrate, consider a two-input system i.e.,
. To favor a ratio of
between the first and third components of a shaped closed loop eigenvector, let
such that
is nonsingular. Then, solve for a matrix
where
Finally, use
as the shaped closed loop eigenvector where
Bear in mind, you only have arbitrary control over closed loop components. Requiring a shaping of more than entries invalidates the method and ends up with a non-square matrix.
6. Instant Matrix Adjugate Related to a Companion Form
The idea is to show how a particular companion form yields direct information related to our study. This form is adopted by MATLAB [
31] to obtain a state space representation of linear systems of a form known as a companion form (shown in (25) below).
This form arises out of modelling certain systems such as a series RLC circuit driven by a voltage source taking the inductor current and capacitor voltage, respectively, as the two states
and
[
32]. As a practical application of such a circuit, it may represent the smoothing and filtering stage of a rectifier circuit [
31]. A model of such a circuit will be considered in
Section 6.1. followed by the relevant analysis.
This form gives direct information to the following:
Regarding stability: The system is unstable whenever at least a coefficient of positive sign exists in the first row.
The determinant of is readily available given by .
The open loop characteristic polynomial coefficients excluding the highest power (which is always 1) are explicitly present as the negated numbers in the first row of ; thus easing the determination of .
A right open loop eigenvector is a nonzero column of the adjugate. A closed loop eigenvector is obtained after post-multiplying the adjugate matrix by .
A left open loop eigenvector is the transpose of a nonzero row of the adjugate.
The derivative of
is given by trace (
) [
23,
24,
25], thus, avoiding differentiation when determining
where the derivative is needed in the evaluation of the first generalized eigenvector as derived in
Section 7.
Assuming a system matrix of no particular form obtained after modeling a general system. To get the companion matrix form, MATLAB, requires the system to be specified through the coefficients of its characteristic polynomial. To attain that, MATLAB can be used to obtain the characteristic polynomial using , yielding for a third order system.
The coefficients of the new companion form are generated using
. The MATLAB
and
matrices assume the two forms shown below in (25). Note that,
is forced to attain the form given in (25) by the nature of the similarity transformation used. For a third order system, the companion form is strictly the following.
When
is an eigenvalue of
,
is singular. Therefore, all columns of the adjugate are linearly dependent as proved in Remark 1,
Section 5. Using (26), the same eigenvector, but of different numeric values is obtained for the same open loop eigenvalue. Being linearly dependent, the columns representing the eigenvectors are scalar multiples of each other. So choose a convenient one, say
. In addition, as explained in
Section 4, the rows of the adjugate matrix give the transposed left open loop eigenvectors. Once more, choose a convenient row such as
. Convenience may be according to simplicity, minimum number of arithmetic operations, and/or avoiding mixtures of positive and negative signs (for memorizing purposes).
Beware. Some matrices may give zero columns. These cannot be used; one has to select another nonzero column in this case. In this regard is always nonzero irrespective of . It is also the simplest. The information above only applies to open loop systems.
When
is not an eigenvalue of
, i.e., newly assigned, all columns of
are linearly independent and (26) is nonsingular. The corresponding closed loop eigenvector is the one ensuing after post-multiplying by
according to (20). With such form as in (25), the closed loop eigenvector
is therefore dictated by the special simple form of the input matrix. It is given by
acting as a perfect explicit matrix formula for
. The associated nonzero
is
For higher order matrices, symbolic MATLAB can be used to determine the matrix adjugate after declaring (may use ) and λ (may use lam) as symbolic variables. For example, for a third order system, use MATLAB to execute.
6.1. A Smoothing and Filtering Stage in a Rectifier Circuit
As a practical application, we first model a series
circuit in the state space. This smoothing circuit follows the rectification stage and precedes the regulation stage [
32,
33]. The series circuit consists of a voltage source together with a resistance, an inductance, and a capacitance, all connected in series. The states are chosen to represent the inductor current and the capacitor voltage respectively. The output of the circuit is the capacitor voltage. It can be easily shown that,
The circuit is not completely in the exact MATLAB form, so we use the following similarity transformation to put it in that form. Let
,
. The transformed system is now given by
Equation (35) is not completely in the standard companion form as in (25). The closed loop eigenvectors are now given by
To conform with the form of as in (27), both
and
in (36) are multiplied by
, yielding,
With this form; having specified two eigenvalues
and
together with their associated
and
, the feedback matrix
is systematically determined as
In essence, when having this form, there is no need to resort to matrix adjugates, nor to null spaces to determine . In addition, since the open loop characteristic polynomial is readily available through the entries in the first row of , is easily determined using (21). Such systematic and explicit determination of the admissible pair stemmed from the use of the matrix adjugate approach and cannot be directly attributed to the traditional method.
9. Examples
Example 1
The case of an invertible
B matrix offers maximum control over the selection of the closed loop eigenvectors. Due to the nonsingularity of
, either
components of the
closed loop right eigenvectors
or all
components of the
closed loop left eigenvectors can be arbitrarily assigned. To see this, consider the right eigenvectors given by an
matrix. Thus,
Since
is square and invertible, a solution for
always exists; given by
indicating that both
and
can be arbitrarily assigned. To assign the left eigenvectors, use
to get
Based on the theory above, consider the two-input system below.
As (56) tells, the outputs are the states and
. The system is meant to be simple enough to demonstrate the theory presented in
Section 2. It can be easily solved even by hand calculation. The detailed solution is presented in
Appendix A.
The idea is to show how preserving the same system eigenvalues, yet changing the eigenvectors, can modify the system time response, both in the transient and in the steady state.
The right-eigenvector matrix
associated with the
and
open loop eigenvalues is
Following the theory presented in
Appendix A, a substitution of these values for
and
together with
and
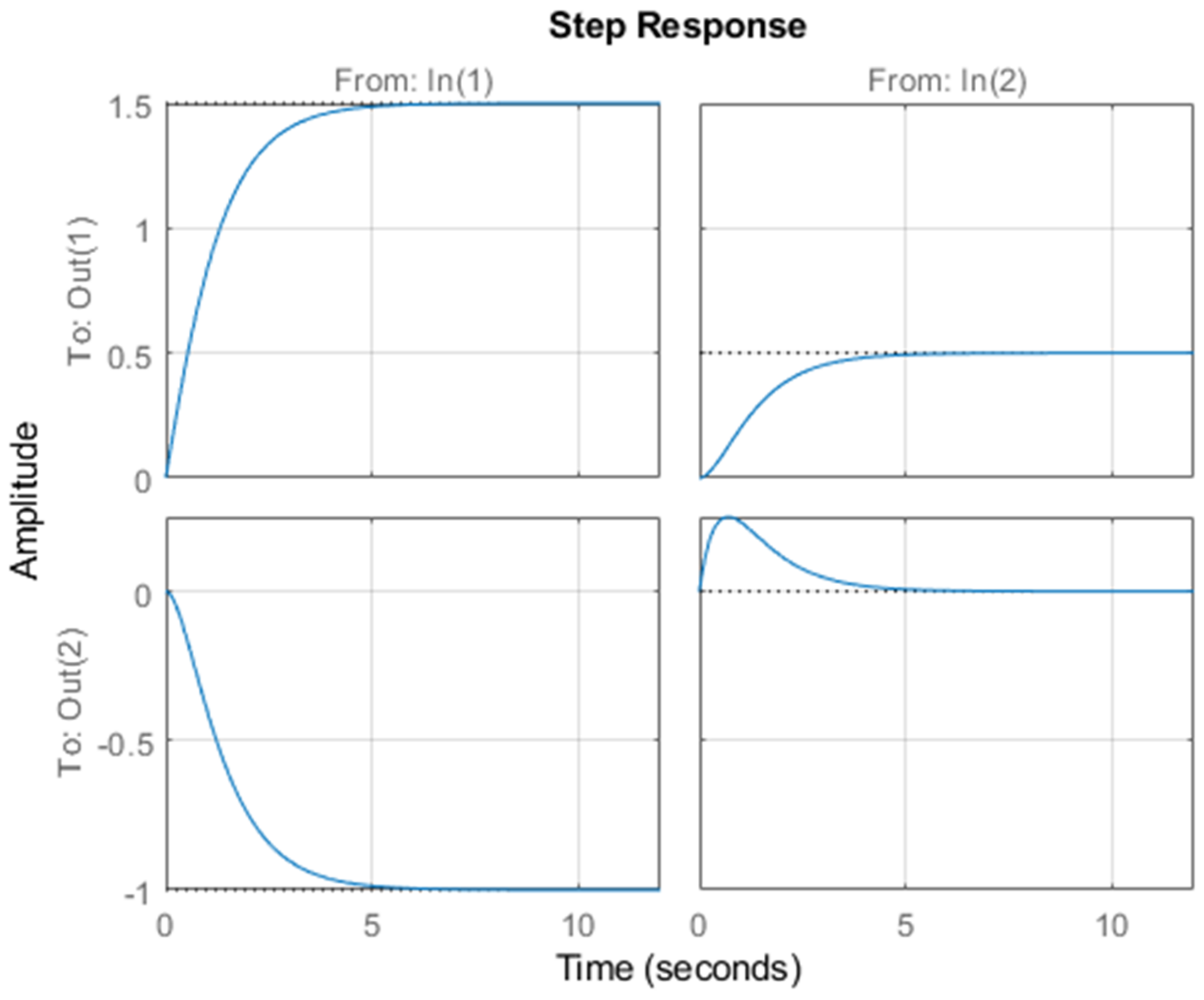
in (1) is done. In order to compare the ensuing calculations with what MATLAB graphical solution gives, each input is solely activated. MATLAB
function [
33] gives a time record of each output due to an excitation of a single input. The time history of the responses is shown in
Figure 1. As apparent from
Figure 1,
and
due to the first input are not in harmony in the sense that
increases positively and
increases negatively: an undesirable case in certain applications of mechanical and electrical systems.
For the two states, the reader can easily compare the initial values and steady values as given by
Figure 1 with those obtained from the state time solutions given in
Appendix A. This is done by substituting
and
, respectively. A perfect match.
The next step is to control the system preserving the eigenvalues
and
but changing the closed loop eigenvectors
to a new arbitrary one, say,
. This results in a left-eigenvector matrix.
Using either (54) or (55)
as expected. The closed loop system matrix
has
and
as closed loop eigenvalues, but now with an alternative set of associated eigenvectors; those given by
.
The same calculations are repeated for the closed loop system using the new
and
. The calculations are presented at the end of
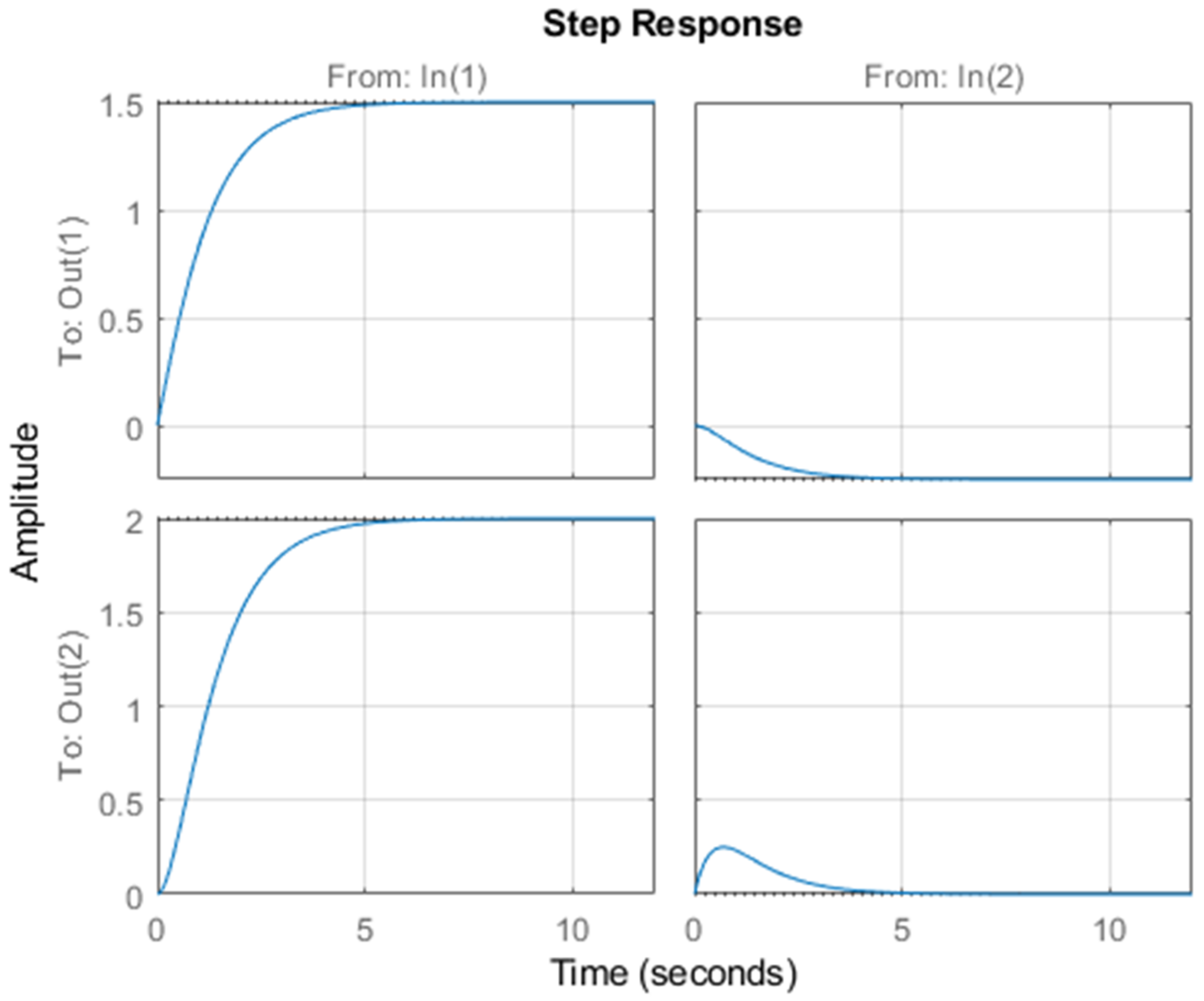
Appendix A. MATLAB is used once more to do the simulation for the closed loop system. The time response is presented in
Figure 2, which shows a different time response resulting from the change in the eigenvectors (note that the eigenvalues are invariant). Due to the first input, both
and
are now increasing in harmony in contrast to their behavior due to the original set of open loop eigenvectors, a virtue attributed to the new set of closed loop eigenvectors. This value is attributed to the use of eigenstructure assignment.
The open loop eigenvalues are retained.
Example 2
Munro, ref. [
37] considered a linearized time-scaled open loop unstable chemical reactor given by
In our case, for the sake of demonstration, it is desired to assign the following four eigenvalues: −3 ± 8.5
i, −0.7, and −6. These values are an approximation to the eigenvalues of the
matrix of a model used in [
37].
Throughout the examples, 5 decimal significant digits are displayed as given by MATLAB format short. To display 15 digits, format long can be used. With both formats, MATLAB employs number rounding. By default, it uses double precision arithmetic.
Using (20), which is related to the adjugate method.
Considering the second eigenvector within
to get
,
,
, and
, i.e.,
According to (21), the
accompanying
is
To simplify arithmetic, one can employ the real and imaginary parts of the pair and avoid complex number manipulation. To assign , real number arithmetic is only used in the determination of as justified below.
For a general fourth order system, to simplify matters; parts related to the complex eigenvalues and eigenvectors are only accentuated. Let
and
be associated with a generic eigenvalue say
, then,
i.e., we can avoid computations involving complex numbers and only involve real number arithmetic since
,
,
and
are all real.
To assign
, one may use the first closed loop eigenvector, i.e.,
is given by
To assign
. For the sake of demonstration, one may use the second closed loop eigenvector associated with
, i.e.,
is given by
Executing the MATLAB command “ ” verifies the assignment of the four eigenvalues.
Suppose now that the eigenvectors associated with the two eigenvalues
and
are to be shaped. The ratio of the first to the fourth entries of the shaped closed loop eigenvector pertinent to −0.7 is a ratio of 2:1. The ratio of the second to the third entries of the shaped closed loop eigenvector pertinent to −6 is a ratio of 3:5. Relevant is remark iv in
Section 5.
Using (20), the two eigenvectors associated with
are
then
is calculated as follows (pick first and fourth rows of
).
The two eigenvectors associated with
are
then
is calculated as follows (pick second and third rows of
).
This is a different from that in (72), assigning the same eigenvalues, but different eigenvectors. The combined influence of the old set of eigenvalues with the newly shaped eigenvectors will yield a different time response.
Example 3
Consider the unstable system.
It is required to assign
,
, and
. The open loop characteristic polynomial is.
To assign the two eigenvalues
, calculations for one eigenvalue say
suffices. Using (20).
Since
is a repeated eigenvalue, one way to determine
and
is using the first order derivative of both
and
with respect to
as given by (44). MATLAB was used to do that symbolically. In which case, the closed loop eigenvectors in terms of a general
are given by.
To validate (87),
as already obtained using the adjugate method, using (87) to determine
where
is the first generalized eigenvector pertinent to
. Hence, use (44) to get the first derivative.
Once more, for the sake of exercise and for checking the answer through an alternative approach, the eigenvectors associated with are now determined using the traditional null space method.
Having obtained
using the adjugate method, we now use (52) bearing in mind that
and
Equation (91) is now used to determine the null space solution for the
generalized eigenvector using (40). If
, the solution vector is divided by
, i.e.,
Using MATLAB
,
Two solutions are obtained. The one ending with a nonzero element for
is adopted for
. It turns out that
already equals
, so no need for normalization. Moreover, the other solution given by the first column is
. It cannot be used as it results in a singular eigenvector matrix having no inverse. Hence,
The same answer as in (90) as it should be since the system is single input and controllable.
Addendum
To assign four repeated eigenvalues on the imaginary axis, they should have the form
and
. This is due to the conjugacy of the eigenvalues of real-number matrices. For the sake of simplicity, let the eigenvalues be
i,
i, −
i, and –
i. In this case, the adjugate method requires determination of an eigenvector and its derivative for one eigenvalue say
i. Utilizing their conjugates, the eigenvectors for the –i eigenvalues are determined. Using the adjugate method together with MATLAB with
and
The remaining two eigenvectors are and ,where the bar indicates complex conjugacy.
The characteristic polynomial and its derivative at
are needed, where
Hence, when
= 1
resulting in the assignment of
i,
i, −
i, −
i as closed loop eigenvalues on the imaginary axis.
In addition, a well-known and interesting problem in discrete systems design is that of dead-beat control, where all eigenvalues are located at the origin. In such case of repeated eigenvalue assignment, we need to differentiate the eigenvector as determined by the adjugate method three times and evaluating all eigenvectors at . Thus, the calculations are considerably simplified. The same is done to the open loop characteristic polynomial and three of its derivatives at to get .
Example 4
In this example we consider a model of a practical electrical system; that of a DC motor. DC motors are widely used in control applications such as robotics, tape drives and autotronics. The motor has many advantages, among which are high startup torque and fast response times to starting, stopping, reversing, and acceleration. In addition, to easy control of speed with moderate voltage or current inputs.
Almost any book on control systems goes through the modeling of an armature control DC motor to a certain degree of complexity [
16,
33,
38]. We shall refer to a research paper [
38] which tackles an armature controlled DC motor used in robotics. However, the model in that paper has been represented by a block diagram model. We take the liberty and derive a state space model of that motor. To do that, we replace
by its equivalent
,
by
for convenience, and adopt the following state variables assignment:
for the angular displacement (
),
for the angular velocity (
), and
for the armature current (
). The output
is the angular velocity
. The armature voltage is
and the load disturbance is
.
We obtain the following state space model. It is a two-input, single output model.
In matrix form,
where
is the motor moment of inertia,
is viscous friction coefficient,
is motor constant,
is back electromotive force coefficient,
and
are the armature resistance and inductance, respectively. Numerical values for these coefficients are not given in [
38]. Therefore, for the sake of demonstration we use the following values which may pertain to an existing generic DC motor: (source:
directindustory.com, 2011). They are:
.
Substituting the parameters listed above in (100), we get
The open loop eigenvalues are . As we are concentrating on the speed control of such a motor, with no intention to control the position of the motor, we seek a controller which retains the zero eigenvalue. To speed up the system we choose closed loop eigenvalues which are almost two-folds of the open loop ones, say . Using the adjugate method with eigenvector shaping, the procedure followed in Example 2 and in Example 3 is repeated.
In our design, a closed loop eigenvector together with are associated with . The other two eigenvectors associated with and are shaped with ratios and between the second and third entries of and , respectively.
To avoid any unnecessary repetition, the calculations needed are the same as those carried out in Example 2 and Example 3. We therefore content ourselves with the following final results.
The steady state value due to a step input is [
33],
were
and
are steady state values.
and
as defined in (114) and (115). The armature voltage is
and
is the disturbing value.
MATLAB
function [
33] gives a time record of the outputs due to an excitation of a single input at a time. The time history of the motor output is shown in
Figure 3.
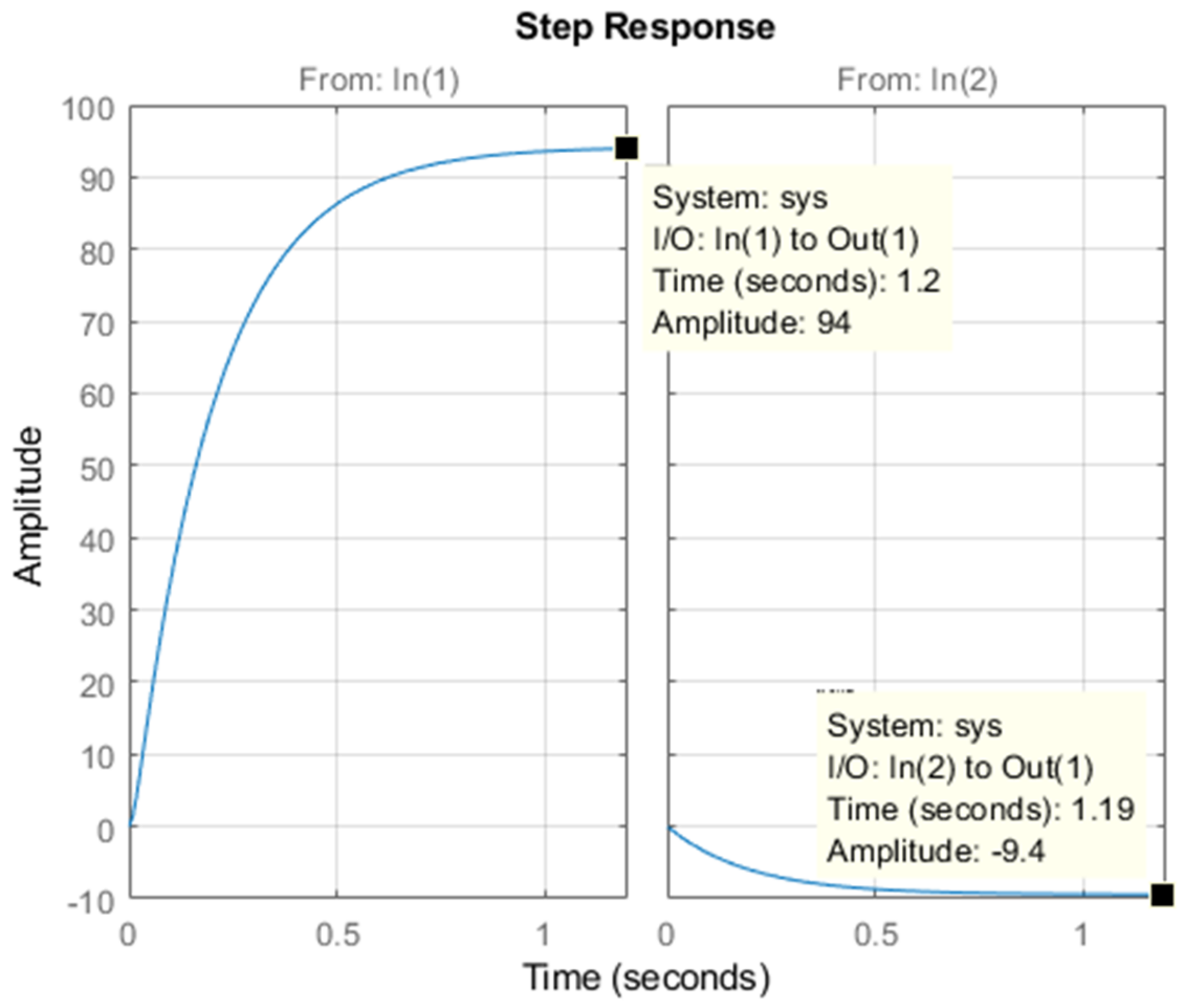
The open loop response is depicted in
Figure 3, which shows the motor steady state speed reaching 94 rpm due to a 50 V armature voltage and −9.4 rpm due to a unit step disturbance. Both reached within a time interval of about 1.2 s. Using (115), the exact calculated steady state values are 94.2026 rpm and −9.4239 rpm, respectively, where
is now obtained from (111).
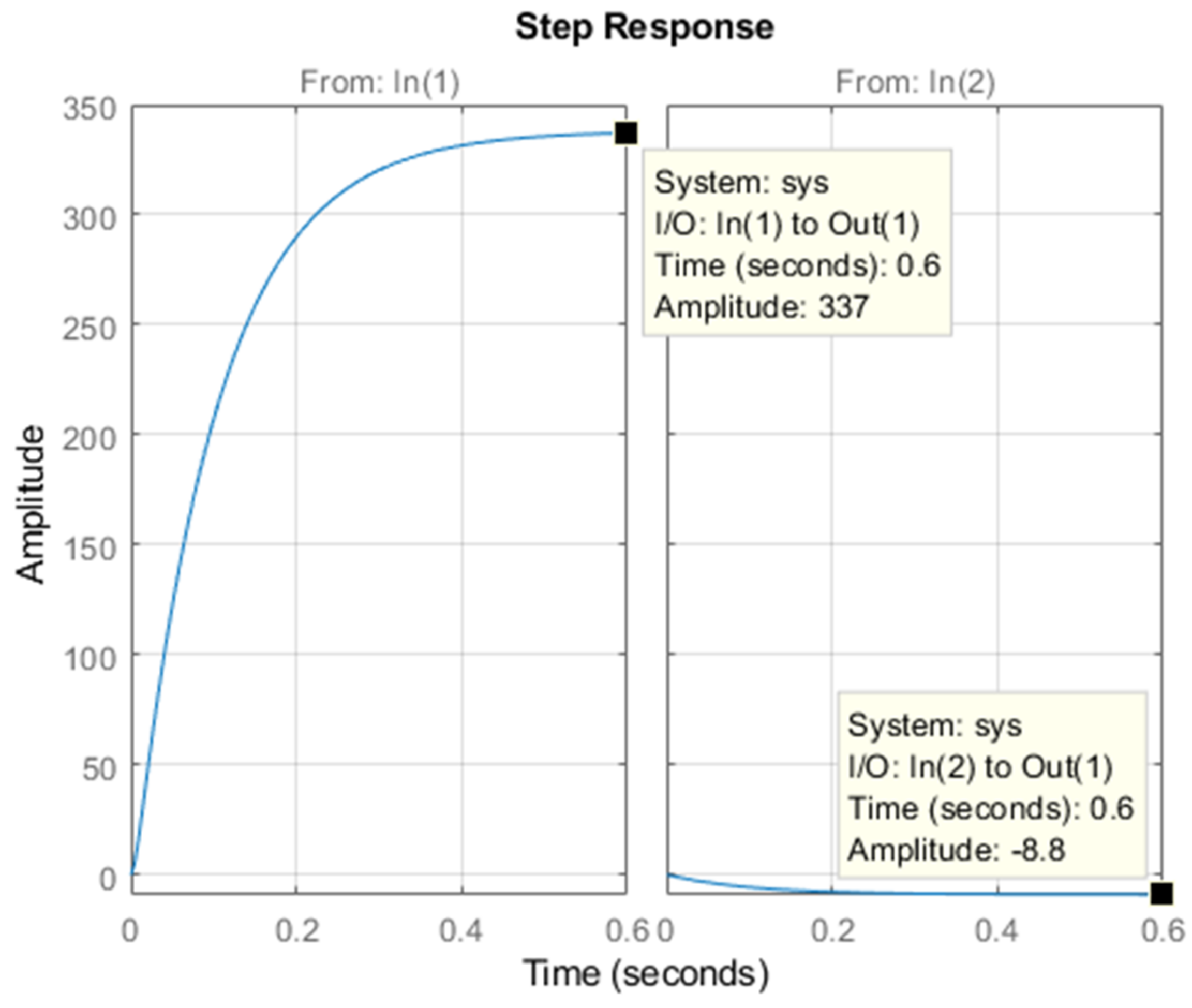
The closed loop system response as a result of
as in (113) is depicted in
Figure 4. It shows the motor steady state speed reaching 337 rpm due to a 50 V armature voltage and −8.8 rpm due to a unit step disturbance. Both were reached within a time interval of about 0.6 s. This gives a clear indication of the effect of feedback in increasing the motor speed and in reducing the time to reach the steady state. Using (115), the exact calculated steady state values are 338.0783 rpm and −8.8235 rpm, respectively.
The example undoubtedly demonstrates the role played by the eigenvectors in shaping the system response. Every choice of the ratios of the closed loop eigenvector entries makes a difference on the final speed and the settling time. Experimenting with alternatives values for the ratios proves that. Note that the feedback matrix , the settling time, and the speed will differ every time a ratio is changed, though the closed loop eigenvalues remain invariant at . That is due to the influence of the closed loop eigenvectors in shaping the system response both in the transient and the steady state.
The program used to do the calculations and the simulations acquired for Example 4 are listed in
Appendix B. It is provided for validating the results and for readers’ experimentation with alternative ratios of eigenvectors entries.



{kind=link}
{kind=link}
{kind=link}
{kind=link}



