
An Optical Encoder Chip with Area Compensation
Abstract
1. Introduction
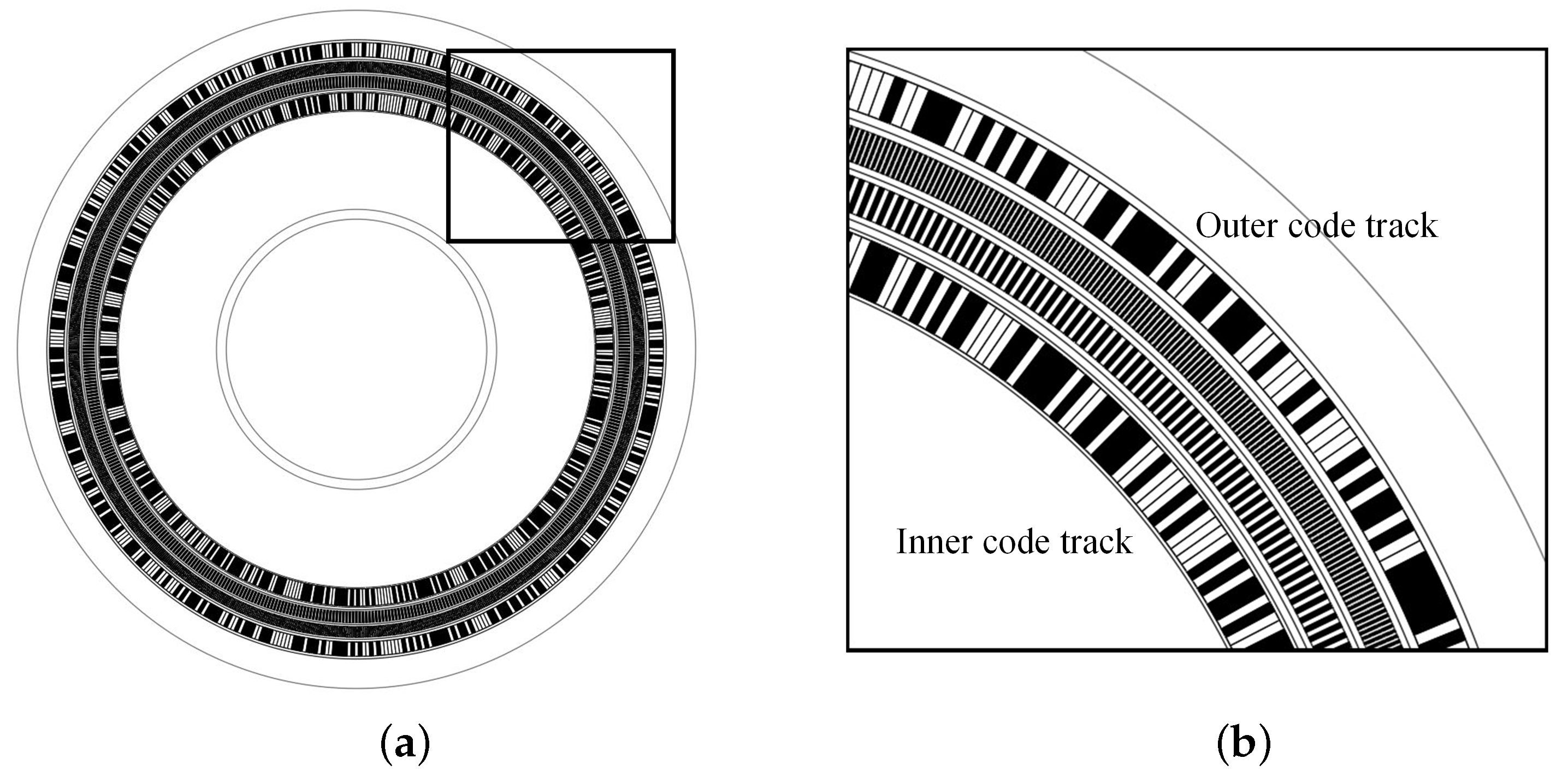
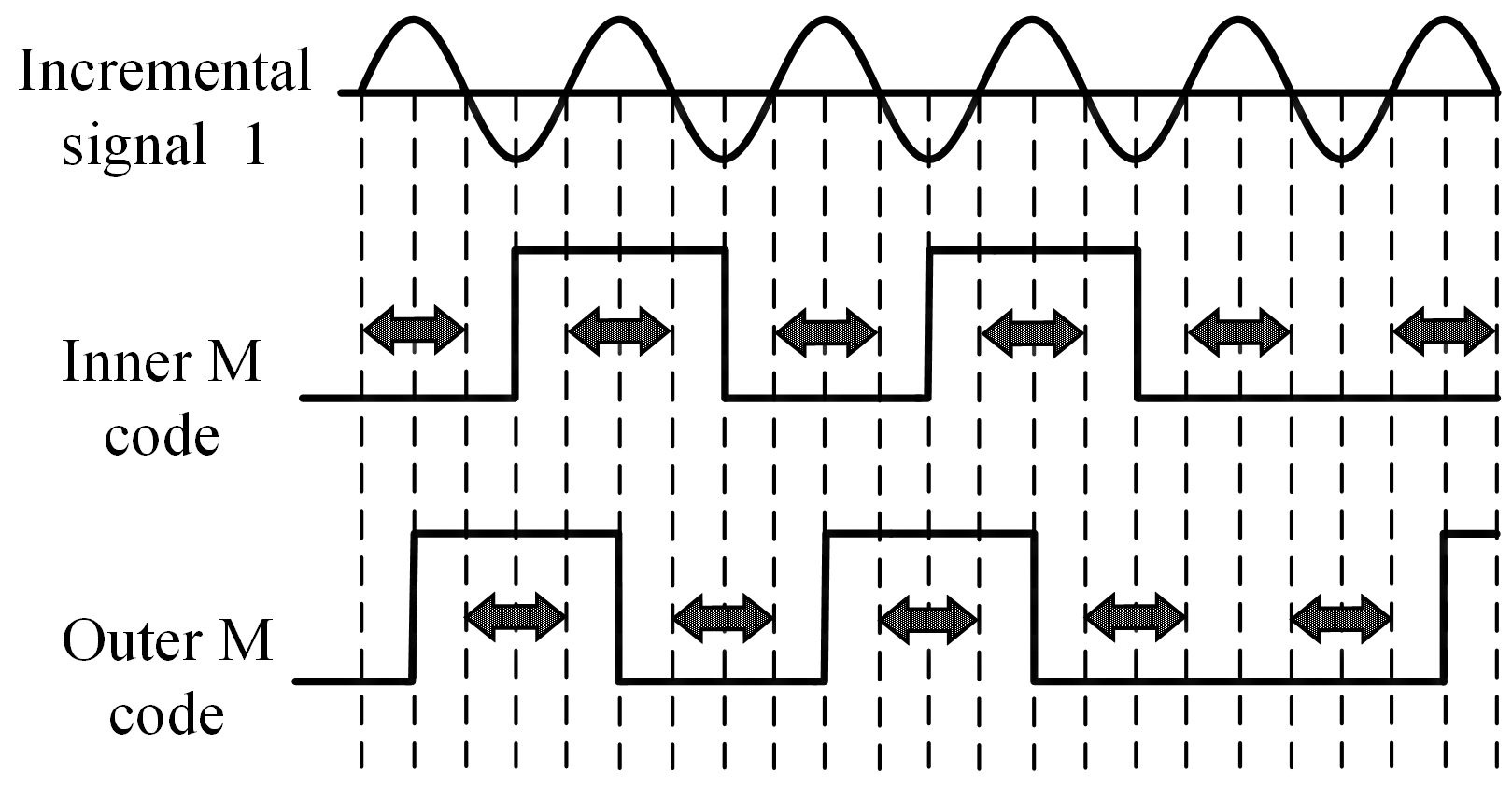
2. Principle of Reflective Hybrid Optical Encoder
3. Theoretical Analysis of Light Intensity and Compensation Design
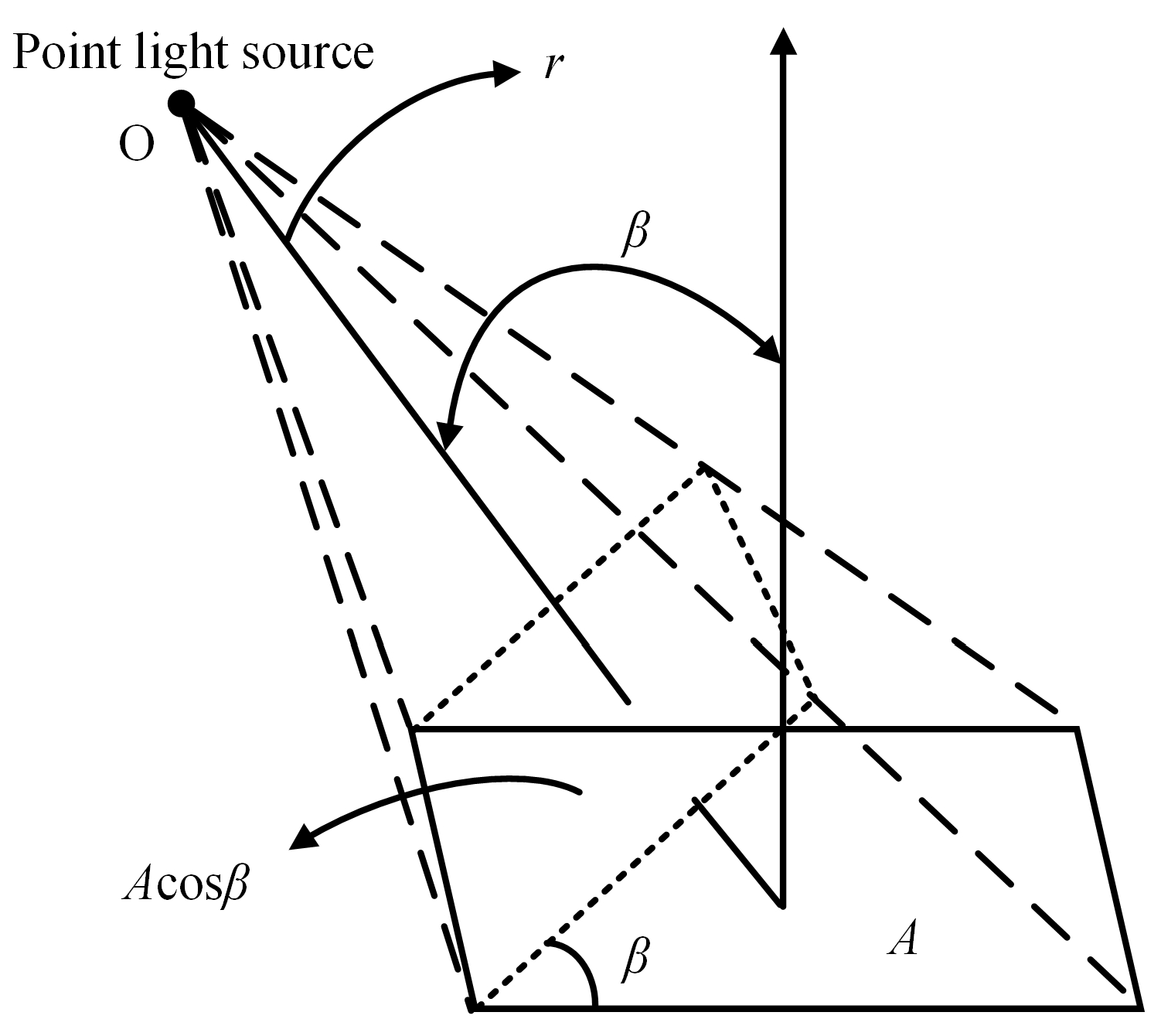
3.1. Analysis of LED Luminous Characteristics
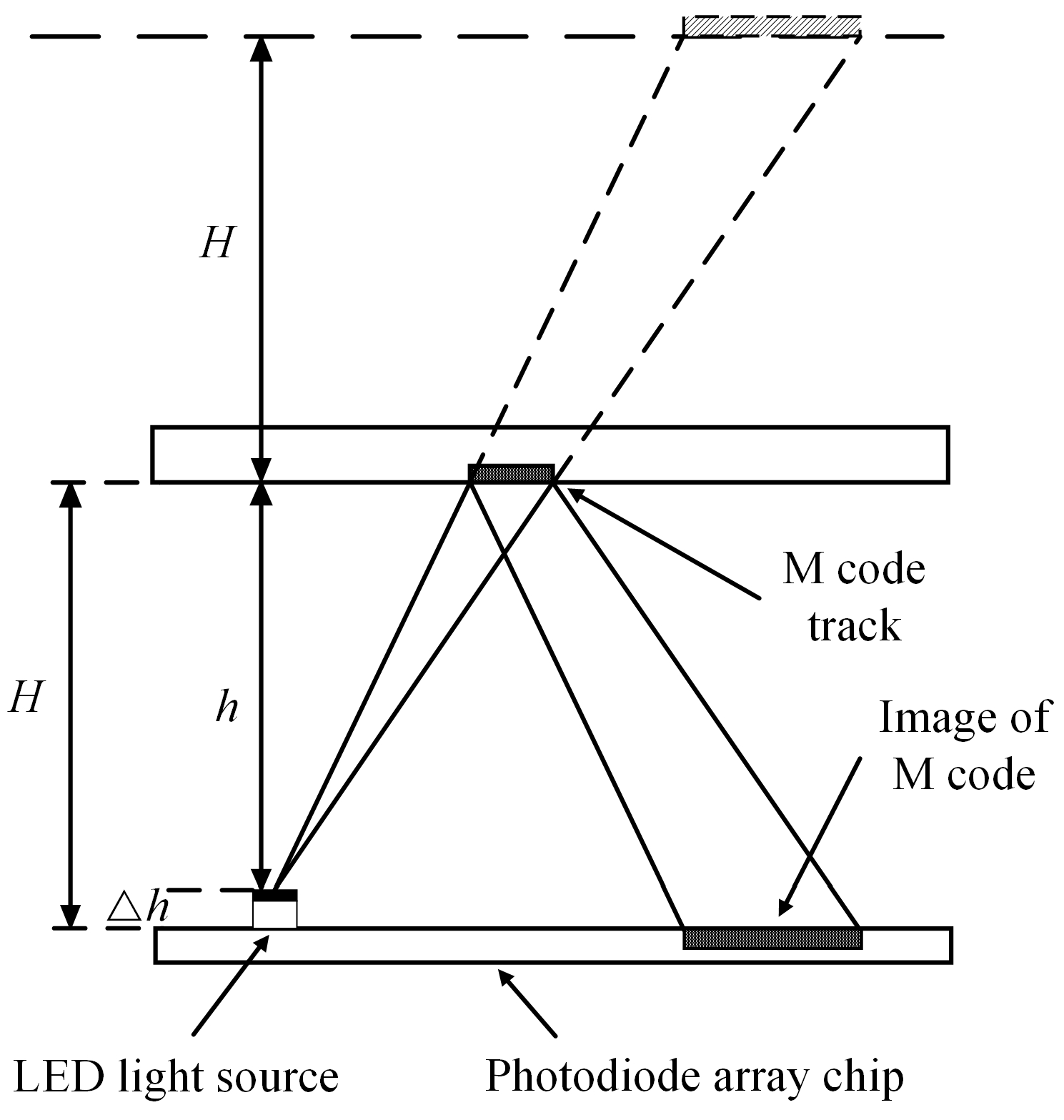
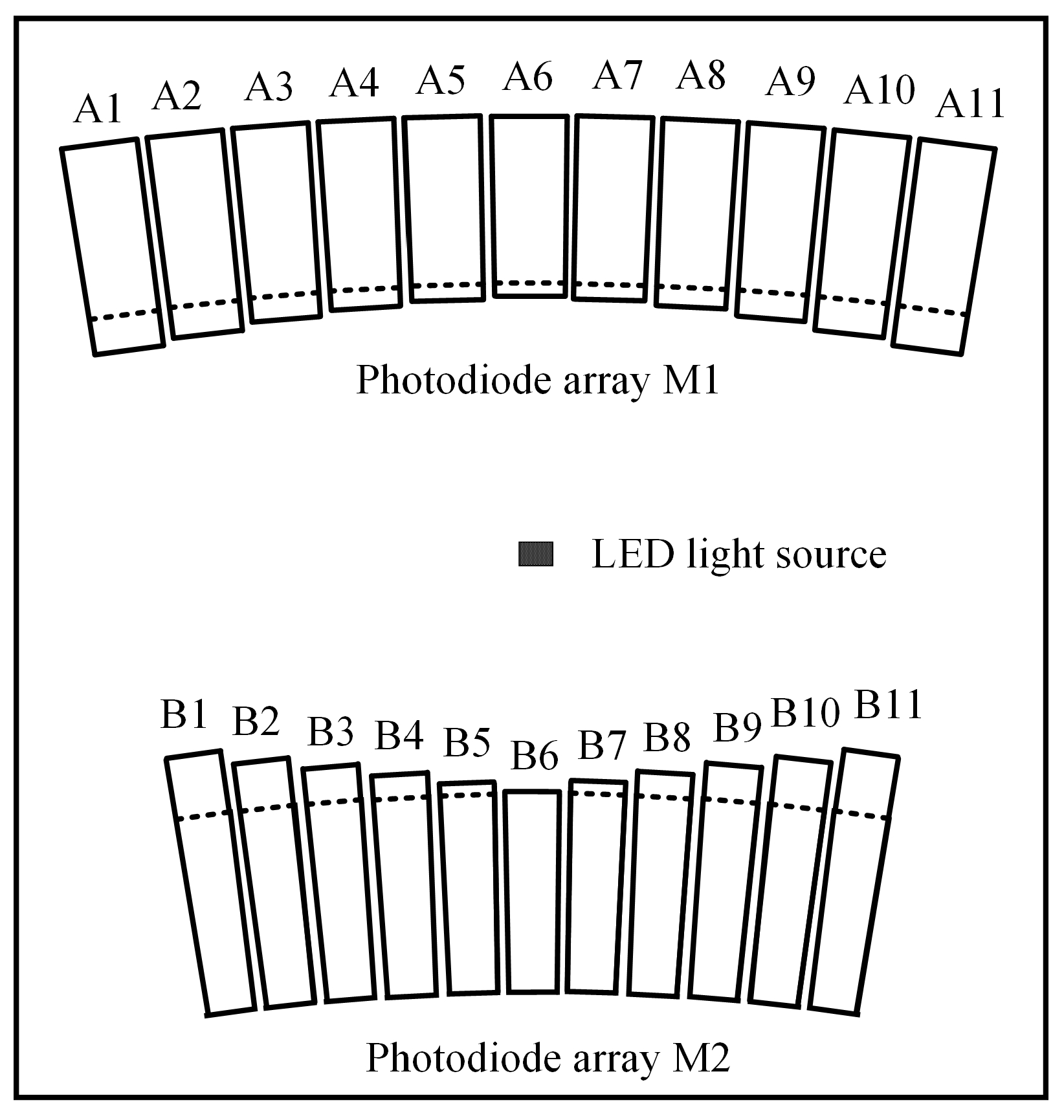
3.2. Design of Photodiode Area Compensation
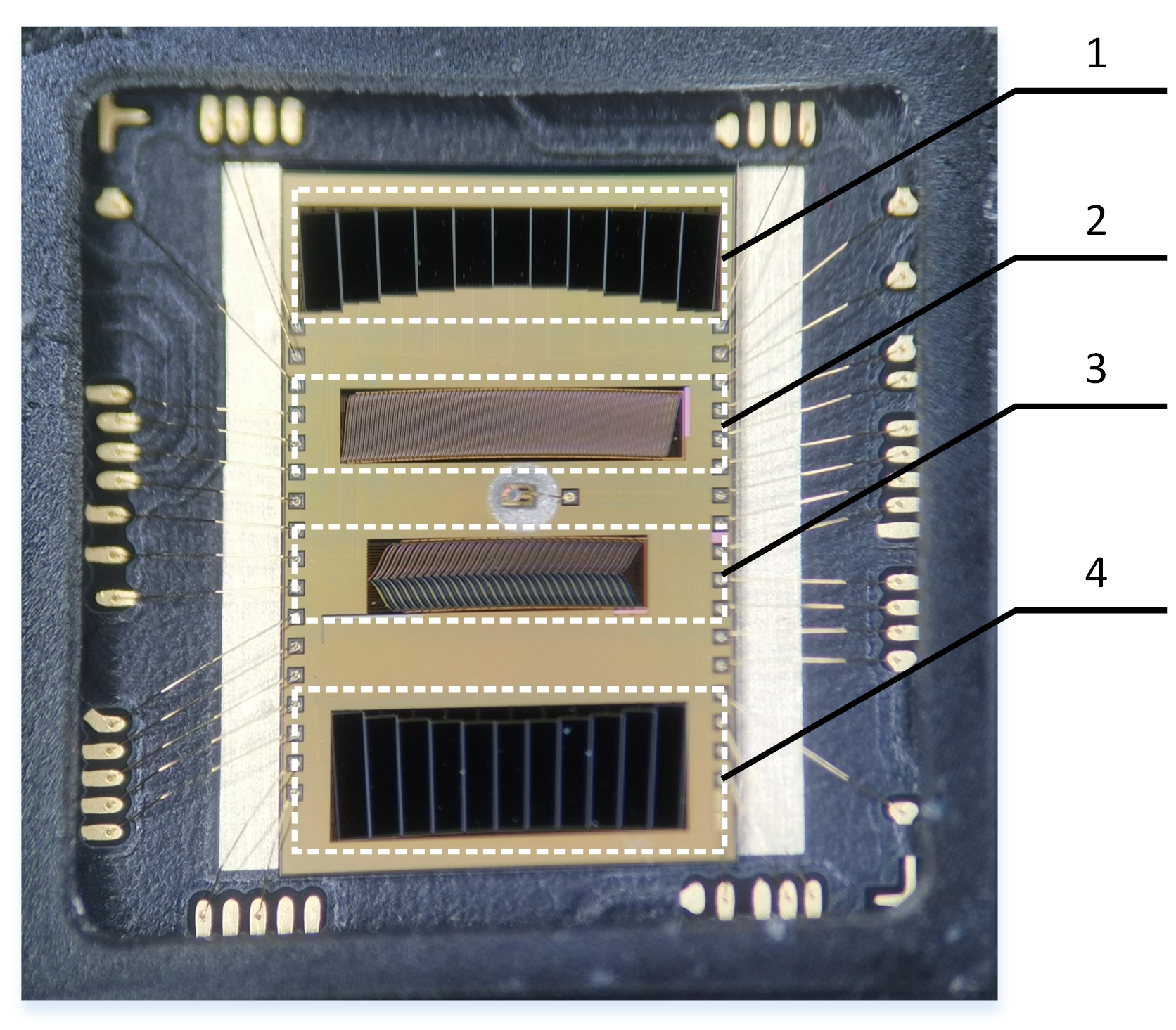
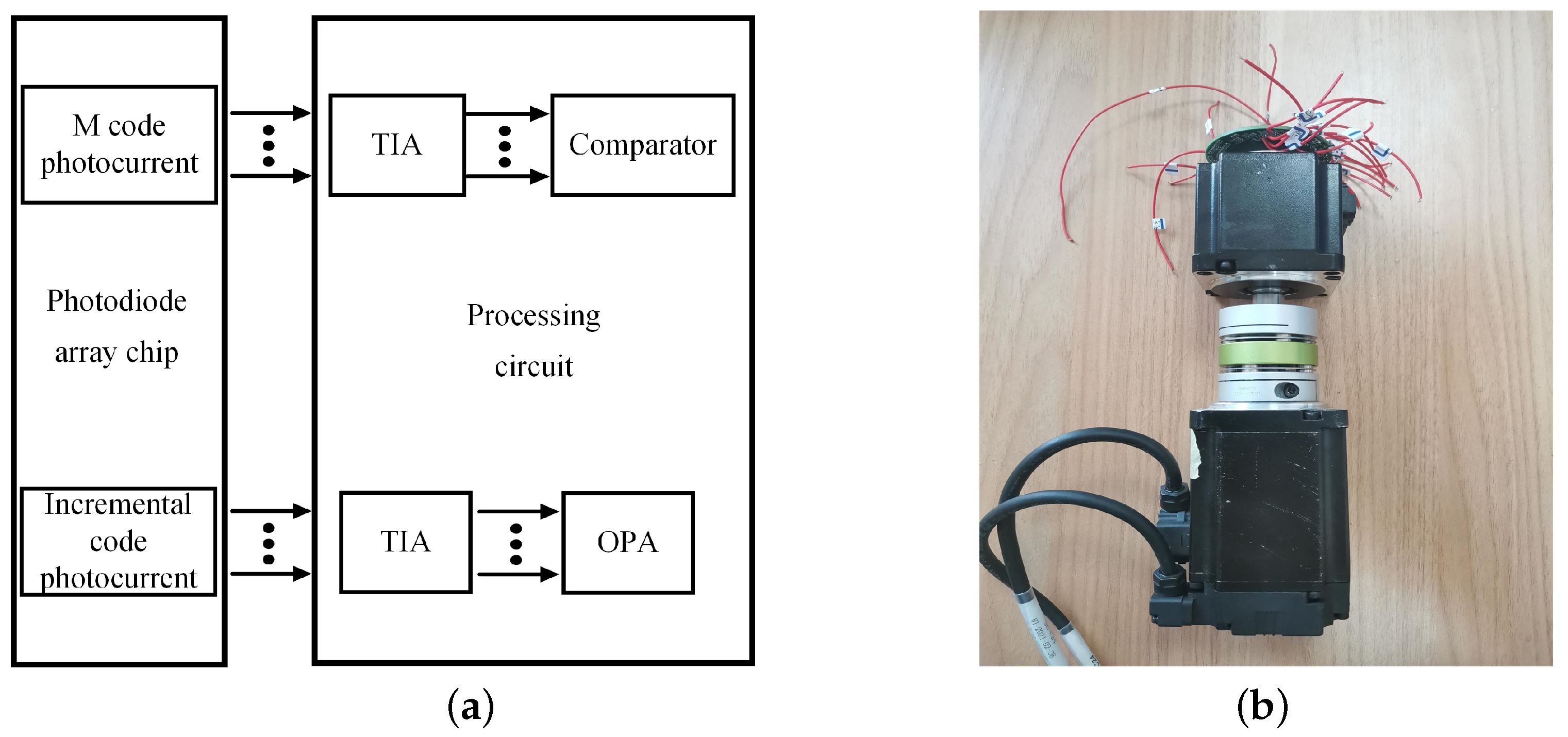
3.3. Chip Implementation
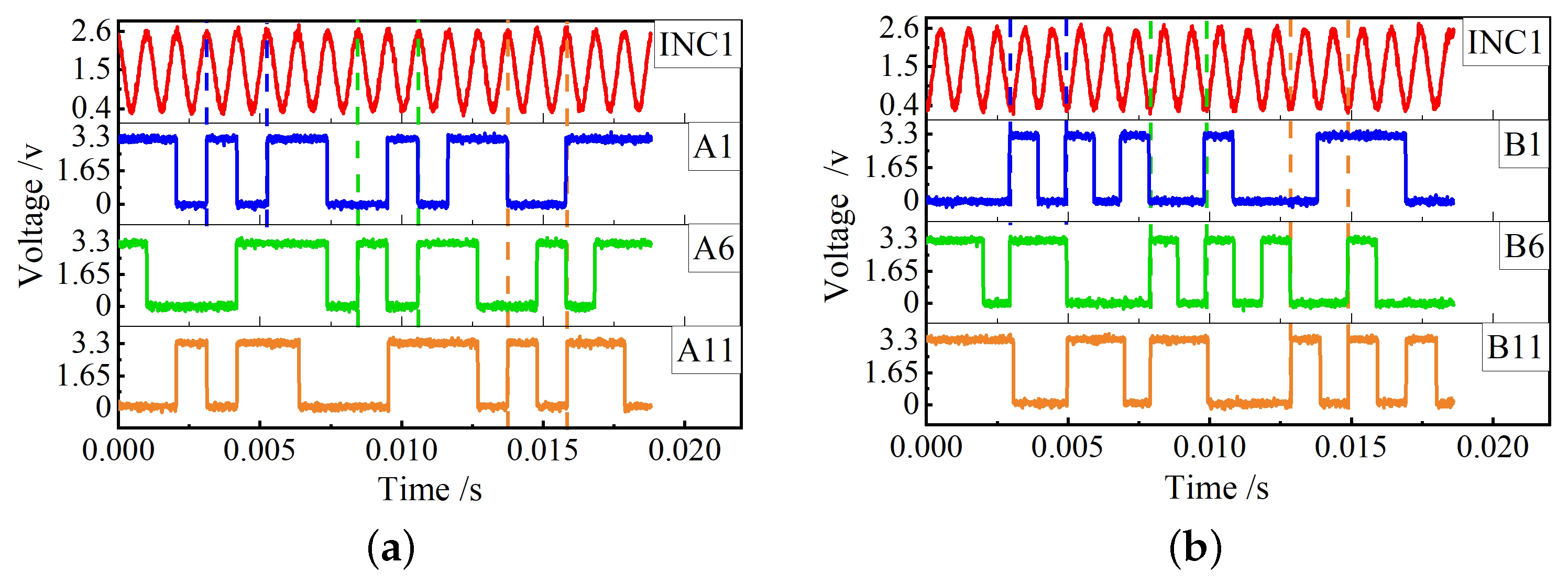
4. Testing and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rodriguez-Donate, C.; Osornio-Rios, R.A.; Rivera-Guillen, J.R.; de Jesus Romero-Troncoso, R. Fused smart sensor network for multi-axis forward kinematics estimation in industrial robots. Sensors 2011, 11, 4335–4357. [Google Scholar] [CrossRef] [PubMed]
- Tameh, T.A.; Sawan, M.; Kashyap, R. Novel analog ratio-metric optical rotary encoder for avionic applications. IEEE Sens. J. 2016, 16, 6586–6595. [Google Scholar] [CrossRef]
- Fleming, W.J. Overview of automotive sensors. IEEE Sens. J. 2001, 1, 296–308. [Google Scholar] [CrossRef]
- Song, J.H.; Kim, K.C.; Kim, S.H. Reducing tilt errors in moiré linear encoders using phase-modulated grating. Rev. Sci. Instrum. 2000, 71, 2296–2300. [Google Scholar] [CrossRef][Green Version]
- Ye, G.; Liu, H.; Ban, Y.; Shi, Y.; Yin, L.; Lu, B. Development of a reflective optical encoder with submicron accuracy. Opt. Commun. 2018, 411, 126–132. [Google Scholar] [CrossRef]
- Johnson, N.; Mohan, K.J.; Janson, K.E.; Jose, J. Optimization of incremental optical encoder pulse processing. In Proceedings of the 2013 International Mutli-Conference on Automation, Computing, Communication, Control and Compressed Sensing (iMac4s), Kottayam, India, 22–23 March 2013; pp. 769–773. [Google Scholar]
- Petriu, E. Absolute position measurement using pseudo-random binary encoding. IEEE Instrum. Meas. Mag. 1998, 1, 19–23. [Google Scholar] [CrossRef][Green Version]
- Kim, J.A.; Kim, J.W.; Kang, C.S.; Jin, J.; Bong Eom, T. An optical absolute position measurement method using a phase-encoded single track binary code. Rev. Sci. Instrum. 2012, 83, 115115. [Google Scholar] [CrossRef] [PubMed]
- Matsuzoe, Y.; Tsuji, N.; Nakayama, T.; Fujita, K.; Yoshizawa, T. High-performance absolute rotary encoder using multitrack and M-code. Opt. Eng. 2003, 42, 124–131. [Google Scholar] [CrossRef]
- Liu, H.; Ye, G.; Shi, Y.; Yin, L.; Chen, B.; Lu, B. Multiple harmonics suppression for optical encoders based on generalized grating imaging. J. Mod. Opt. 2016, 63, 1564–1572. [Google Scholar] [CrossRef]
- Mitchell, D.K. A radiation-hardened, high-resolution optical encoder for use in aerospace applications. In Proceedings of the 2008 IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2008; pp. 1–7. [Google Scholar]
- Rozman, J.; Pletersek, A. Linear Optical Encoder System with Sinusoidal Signal Distortion Below −60 dB. IEEE Trans. Instrum. Meas. 2009, 59, 1544–1549. [Google Scholar] [CrossRef]
- Ye, G.; Liu, H.; Shi, Y.; Yin, L.; Lu, B.; Hui, X.; Yang, Y. Optimizing design of an optical encoder based on generalized grating imaging. Meas. Sci. Technol. 2016, 27, 115005. [Google Scholar] [CrossRef]
- Ye, G.; Liu, H.; Jiang, W.; Li, X.; Jiang, W.; Yu, H.; Shi, Y.; Yin, L.; Lu, B. Design and development of an optical encoder with sub-micron accuracy using a multiple-tracks analyser grating. Rev. Sci. Instrum. 2017, 88, 015003. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Wan, Q.; Zhao, C.; Han, Q.; Mu, Z. Error compensation for low-density circular gratings based on linear image-type angular displacement measurements. IEEE Trans. Ind. Electron. 2022, 69, 13736–13743. [Google Scholar] [CrossRef]
- Xiao, K.; Wang, L. Analysis and error compensation of electric sine/cosine encoder. In Proceedings of the 2009 9th International Conference on Electronic Measurement & Instruments, Beijing, China, 16–19 August 2009; pp. 1–87. [Google Scholar]
- Ye, G.; Xing, H.; Liu, H.; Li, Y.; Lei, B.; Niu, D.; Li, X.; Lu, B.; Liu, H. Total error compensation of non-ideal signal parameters for Moiré encoders. Sens. Actuator A Phys. 2019, 298, 111539. [Google Scholar] [CrossRef]
- Gottardi, M.; Gonzo, L.; Gregori, S.; Liberali, V.; Simoni, A.; Torelli, G. An integrated CMOS front-end for optical absolute rotary encoders. Analog Integr. Circuits Process. 2003, 34, 143–154. [Google Scholar] [CrossRef]
- Maschera, D.; Simoni, A.; Gottardi, M.; Gonzo, L.; Gregori, S.; Liberali, V.; Torelli, G. An automatically compensated readout channel for rotary encoder systems. IEEE Trans. Instrum. Meas. 2001, 50, 1801–1807. [Google Scholar] [CrossRef]
- Seybold, J.; Bülau, A.; Fritz, K.P.; Frank, A.; Scherjon, C.; Burghartz, J.; Zimmermann, A. Miniaturized optical encoder with micro structured encoder disc. Appl. Sci. 2019, 9, 452. [Google Scholar] [CrossRef]
- Liberali, V.; Cherchi, F.; Disingrini, L.; Gottardi, M.; Gregori, S.; Torelli, G. A digital self-calibration circuit for absolute optical rotary encoder microsystems. IEEE Trans. Instrum. Meas. 2003, 52, 149–157. [Google Scholar] [CrossRef]
- Yan, Y.J.; Liao, C.C.; Wang, T.F.; Ou-Yang, M. Optimizing the De-Bruijn code of rotary optical encoders preventing from the photocurrent blooming. IEEE Sens. J. 2020, 21, 1493–1503. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Photodiode | Height (µm) | Top Length (µm) | Bottom Length (µm) | Photodiode Area (µm) |
|---|---|---|---|---|
| A1/A11 | 810.9478 | 303.9871 | 313.4860 | 250,369.2260 |
| A2/A10 | 734.4633 | 304.8830 | 313.4860 | 227,084.6682 |
| A3/A9 | 677.2732 | 305.5529 | 313.4860 | 209,629.2284 |
| A4/A8 | 637.6607 | 306.0169 | 313.4860 | 197,516.3264 |
| A5/A7 | 614.3909 | 306.2895 | 313.4860 | 190,392.2136 |
| A6 | 606.7166 | 306.3794 | 313.4860 | 188,041.3140 |
| B1/B11 | 1032.7972 | 248.1883 | 260.1652 | 262,513.0357 |
| B2/B10 | 959.8140 | 248.1883 | 259.3189 | 243,556.2578 |
| B3/B9 | 904.8245 | 248.1883 | 258.6812 | 229,313.9710 |
| B4/B8 | 866.4818 | 248.1883 | 258.2365 | 219,403.9361 |
| B5/B7 | 843.8465 | 248.1883 | 257.9740 | 213,561.6426 |
| B6 | 836.3628 | 248.1883 | 257.8872 | 211,631.3611 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Liang, Y.; Zhang, W.; Yang, X.; Hao, D. An Optical Encoder Chip with Area Compensation. Electronics 2022, 11, 3997. https://doi.org/10.3390/electronics11233997
Wang X, Liang Y, Zhang W, Yang X, Hao D. An Optical Encoder Chip with Area Compensation. Electronics. 2022; 11(23):3997. https://doi.org/10.3390/electronics11233997
Chicago/Turabian StyleWang, Xi, Yu Liang, Wei Zhang, Xue Yang, and Dongning Hao. 2022. "An Optical Encoder Chip with Area Compensation" Electronics 11, no. 23: 3997. https://doi.org/10.3390/electronics11233997
APA StyleWang, X., Liang, Y., Zhang, W., Yang, X., & Hao, D. (2022). An Optical Encoder Chip with Area Compensation. Electronics, 11(23), 3997. https://doi.org/10.3390/electronics11233997