





Detection of Fake Replay Attack Signals on Remote Keyless Controlled Vehicles Using Pre-Trained Deep Neural Network



Abstract
1. Introduction
2. Literature Review
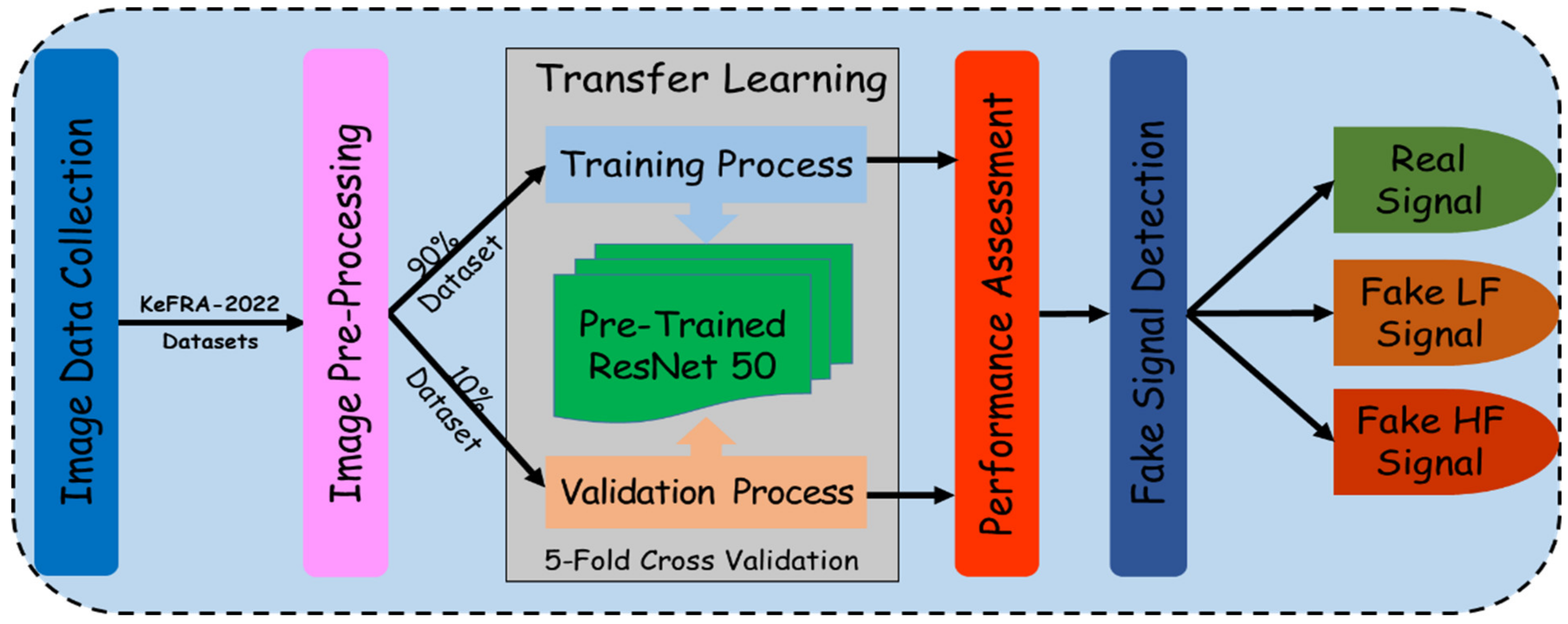
3. Detection System Modeling
3.1. Image Dataset and Preprocessing Subsystem
- Image Resizing: All images have been resized to accommodate the input layer of pre-trained ResNet50 CNN. Therefore, the original size of the image samples, 1288 × 421 × 3, was downsized to 224 × 224 × 3;
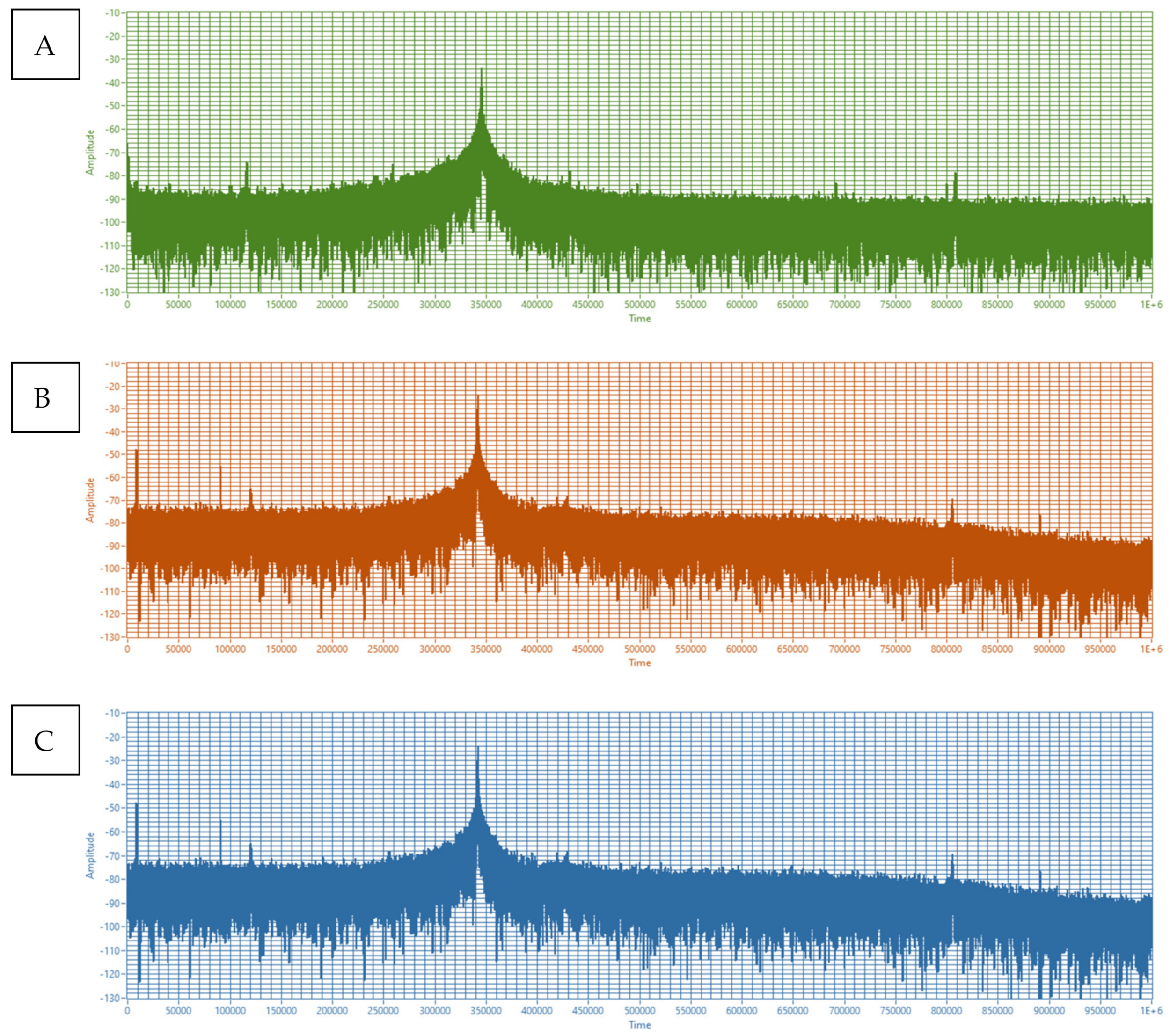
- Image augmentation: This is a process concerned with applying simple and complex image transformations in order to increase the number of data samples in the dataset. Several image transformations were applied here, including (1) random reflection axis X, (2) random reflection axis Y, (3) random image rotation using min-max degrees, (4) random image rescaling using min-max factors, (5) random horizontal translation using min-max pixels, and (6) random vertical translation using min-max pixels. Since the number of images in the accumulated dataset is relatively small, with a small frequency for each class (340 images in total distributed in 110 images for the real signal, 110 images for the fake signal with high gain, and 120 images for the fake signal with low gain). Therefore, the images in the dataset have undergone the image argumentation phase to increase the number of images and improve the learning process of the employed classifier. The images were subject to six transformation processes, including (1) random reflection axis X, (2) random reflection axis Y, (3) random image rotation using min-max degrees, (4) random image rescaling using min-max factors, (5) random horizontal translation using min-max pixels, and (6) random vertical translation. This, in turn, has resulted in increasing the frequency of images for each class by a factor of 6. The following figure shows the frequency graph image before and after augmentation. Figure 4 shows the frequency graph image of the classes contained in the dataset before and after applying image argumentation processes. The total number of images before and after the data argumentation (using 6 different transformations): (1) before the data argumentation, 340 images, and (2) after the data argumentation, 2040 images;
- Image Shuffling: All images have been randomly redistributed before starting the learning process. This is necessary to ensure that each data sample creates an “independent” change in the model without being biased by the same points [29];
- Image Distribution: Finally, the dataset is divided into two separate datasets: (A) training dataset (90% of the images in the dataset) and (B) testing dataset (10%) of the images in the dataset). Five-fold cross-validation (CV) was implemented to test the effectiveness of the learning model and provide a re-sampling procedure to evaluate a model in case of limited data [30]. The valuation process is repeated five times using different random validation sets (fold) using a Five-fold CV. For each validation experiment, the performance is evaluated and recorded for the specific fold. Finally, the overall performance is evaluated as the average of all experiments (i.e., five folds). To ensure the random distribution for splitting data for training and testing, we use the DivideRand algorithm [31] implemented in MATLAB to divide targets into sets using random indices. DivideRand takes the number of targets to divide up, the ratio of vectors for training, the ratio of vectors for validation, and the ratio of vectors for testing, and returns the training indices, the validation indices, and the test indices.
3.2. Transfer Learning Subsystem
3.3. Assessment and Detection Subsystem
4. Experimental Results and Discussion
5. Conclusions and Remarks
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lennert, W.; Benedikt, G.; Bart, P. My other car is your car: Compromising the Tesla Model X keyless entry system. IACR Trans. Cryptogr. Hardw. Embed. Syst. 2021, 2021, 149–172. [Google Scholar]
- Kyle, G.; Deven, R.; Henry, D.; Quamar, N.; Khair, A.S.; Vijay, D. A Defense Mechanism Against Replay Attack in Remote Keyless Entry Systems Using Timestamping and XOR Logic. IEEE Consum. Electron. Mag. 2021, 10, 101–108. [Google Scholar]
- Marin, E.; Ashur, T.; Gierlichs, B.; Preneel, B. Fast, Furious and Insecure: Passive Keyless Entry and Start Systems in Modern Supercars. IACR Trans. Cryptogr. Hardw. Embed. Syst. 2019, 2019, 66–85. [Google Scholar]
- Kyungho, J.; Wonsuk, C.; Hoon, L.D. Hold the Door! Fingerprinting Your Car Key to Prevent Keyless Entry Car Theft. arXiv 2020, arXiv:2003.13251. [Google Scholar]
- KiranRaj, K.S.; Ananya, C.; Ratan, S. Analysing Remote Keyless Entity Systems. Int. J. Res. Anal. Rev. 2019, 6, 136–138. [Google Scholar]
- Poolat, P.R.; Biplab, S. An Authentication Mechanism for Remote Keyless Entry Systems in Cars to Prevent Replay and RollJam Attacks. In IEEE Intelligent Vehicles Symposium (IV); IEEE: Aachen, Germany, 2022. [Google Scholar]
- Abu Al-Haija, Q.; Al Badawi, A. High-performance intrusion detection system for networked UAVs via deep learning. Neural Comput. Appl. 2022, 34, 10885–10900. [Google Scholar] [CrossRef]
- Husain, R.; Khan, R.; Tyagi, R.K. Novel Technique for Secure Keyless Car Authentication using Block-Chain System. I-Manag. J. Comput. Sci. 2020, 8, 12020. [Google Scholar]
- Tobias, V.C.; Carlo, M.; Veelasha, M.; Erik, P. Security Analysis of Aftermarket Remote Keyless Entry Systems for Consumer Vehicles; Radboud University Nijmegen: Nijmegen, The Netherlands, 2020. [Google Scholar]
- Jing, L.; Yabo, D.; Shengkai, F.; Haowen, Z.; Duanqing, X. User Context Detection for Relay Attack Resistance in Passive Keyless Entry and Start System. Sensors 2020, 20, 4446. [Google Scholar]
- Al-Haija, Q.A.; Alsulami, A.A. High-Performance Classification Model to Identify Ransomware Payments for Heterogeneous Bitcoin Networks. Electronics 2021, 10, 2113. [Google Scholar] [CrossRef]
- De la Cruz, J.E.C.; Romero, G.C.A.; Delgado, C.C. Open VProxy: Low-Cost Squid Proxy Based Teleworking Environment with OpenVPN Encrypted Tunnels to Provide Confidentiality, Integrity and Availability. In Proceedings of the IEEE Engineering International Research Conference (EIRCON), Lima, Peru, 21–23 October 2020. [Google Scholar]
- Paul, S.; Kai, J.; Christian, Z.; Christof, P. Securing Phone as a Key Against Relay Attacks. In Proceedings of the 18th Escar Europe: The World’s Leading Automotive Cyber Security Conference (Konferenzveröffentlichung), Berlin, Germany, 11–12 November 2020. [Google Scholar]
- Asadullah, A.; Karthik, P.; Sharath, D.; Mohammad, A.; Sourik, M.; Chidambaram, V. Mechanism to Identify Legitimate Vehicle User in Remote Keyless Entry System; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2022. [Google Scholar]
- Pouyan, R.; Abdollah, K.-F.; Morteza, D.; Tao, J.; Wencong, S. Ultra-Lightweight Mutual Authentication in the Vehicle Based on Smart Contract Blockchain: Case of MITM Attack. IEEE Sens. J. 2020, 21, 15839–15848. [Google Scholar]
- Ibrahim, R.F.; Abu Al-Haija, Q.; Ahmad, A. DDoS Attack Prevention for Internet of Thing Devices Using Ethereum Blockchain Technology. Sensors 2022, 22, 6806. [Google Scholar] [CrossRef] [PubMed]
- Chenjing, C.; Shiwei, W.; Youjun, X.; Weilin, Z.; Ke, T.; Qi, O.; Luhua, L.; Jianfeng, P. Transfer Learning for Drug Discovery. J. Med. Chem. 2020, 63, 8683–8694. [Google Scholar]
- Juan, W.; Karim, L.; Mohammad, Z. CSKES: A Context-Based Secure Keyless Entry System. In Proceedings of the EEE 43rd Annual Computer Software and Applications Conference (COMPSAC), Milwaukee, WI, USA, 15–19 July 2019. [Google Scholar]
- Madhumitha, S.S.; Rohini, P.; Arunkumar, R.; Gunasekaran, R. Effective Cryptography Mechanism for Enhancing Security in Smart Key System. In Proceedings of the Tenth International Conference on Advanced Computing (ICoAC), Chennai, India, 13–15 December 2018. [Google Scholar]
- Jinita, P.; Lal, D.M.; Sukumar, N. On the Security of Remote Key Less Entry for Vehicles. In Proceedings of the IEEE International Conference on Advanced Networks and Telecommunications Systems (ANTS), Indore, India, 16–19 December 2018. [Google Scholar]
- Emad, A.; Omer, R.; Charith, P.; Peter, B. Cyberattacks and Countermeasures for In-Vehicle Networks. ACM Comput. Surv. 2022, 54, 1–37. [Google Scholar]
- Theyazn, H.A.; Orcid, H.; Hasan, A. Attacks to Automatous Vehicles: A Deep Learning Algorithm for Cybersecurity. Sensors 2022, 22, 360. [Google Scholar]
- Béatrix-May, B.; Ştefan, S.I.; Claudia, P.-N.A.; Florin, P. Cyber-Physical Systems—A New Approach for Keyless Entry Systems. In Proceedings of the 23rd International Conference on Control Systems and Computer Science (CSCS), Bucharest, Romania, 26–28 May 2021. [Google Scholar]
- Odeh, A.; Keshta, I.; Al-Haija, Q.A. Analysis of Blockchain in the Healthcare Sector: Application and Issues. Symmetry 2022, 14, 1760. [Google Scholar] [CrossRef]
- Usman, A.; Hong, S.; Awais, B.; Mamoun, A.; Alireza, J. Secure Passive Keyless Entry and Start System Using Machine Learning. Security, Privacy, and Anonymity in Computation. Commun. Storage 2018, 11342, 304–313. [Google Scholar]
- Wang, J. A Secure Keyless Entry System Based on Contextual Information, Proquest. Ph.D. Thesis, Queen’s University, Kingston, ON, Canada, 2019. [Google Scholar]
- Kyle, G.; Deven, R.; Henry, D.; Kyle, M.; Quamar, N.; Khair, A.S. Timestamp-based Defense Mechanism Against Replay Attack in Remote Keyless Entry Systems. In Proceedings of the IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 4–6 January 2020. [Google Scholar]
- Martinez Quintero, J.C.; Estupinan Cuesta, E.P.; Ramirez Lopez, L. KeFRA Images: Key-fob RKE Replay Attack; Mendeley Data, 2022. [Google Scholar] [CrossRef]
- Al-Haija, Q.A.; Adebanjo, A. Breast Cancer Diagnosis in Histopathological Images Using ResNet-50 Convolutional Neural Network. In Proceedings of the 2020 IEEE International IoT, Electronics and Mechatronics Conference (IEMTRONICS), Vancouver, BC, Canada, 9–12 September 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Sanjay, M. Why and How to Cross Validate a Model? Importance and Types of Cross-Validation Techniques; Towards Data Science: Medium. 2018. Available online: https://towardsdatascience.com/why-and-how-to-cross-validate-a-model-d6424b45261f (accessed on 11 June 2022).
- Abu Al-Haija, Q.; Al-Dala’ien, M. ELBA-IoT: An Ensemble Learning Model for Botnet Attack Detection in IoT Networks. J. Sens. Actuator Netw. 2022, 11, 18. [Google Scholar] [CrossRef]
- Al-Haija, Q.A. Leveraging ShuffleNet transfer learning to enhance handwritten character recognition. Gene Expr. Patterns 2022, 45, 119263. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. arXiv 2015, arXiv:1512.03385v1. [Google Scholar]
- Abu Al-Haija, Q. Top-Down Machine Learning-Based Architecture for Cyberattacks Identification and Classification in IoT Communication Networks. Front. Big Data 2022, 4, 782902. [Google Scholar] [CrossRef]
- Alsulami, A.A.; Abu Al-Haija, Q.; Alqahtani, A.; Alsini, R. Symmetrical Simulation Scheme for Anomaly Detection in Autonomous Vehicles Based on LSTM Model. Symmetry 2022, 14, 1450. [Google Scholar] [CrossRef]
- Sarwar, A.; Hasan, S.; Khan, W.U.; Ahmed, S.; Marwat, S.N.K. Design of an Advance Intrusion Detection System for IoT Networks. In Proceedings of the 2022 2nd International Conference on Artificial Intelligence (ICAI), Islamabad, Pakistan, 30–31 March 2022. [Google Scholar]
- Almasoud, A.S.; Eisa, T.A.E.; Al-Wesabi, F.N.; Elsafi, A.; Al Duhayyim, M.; Yaseen, I.; Hamza, M.A.; Motwakel, A. Parkinson’s Detection Using RNN-Graph-LSTM with Optimization Based on Speech Signals. Comput. Mater. Contin. 2022, 72, 872–886. [Google Scholar] [CrossRef]
- Abdallah, R.G.; Ahmed, A.N.; Tamer, M.B. Intrusion Detection System Using Machine Learning for Vehicular Ad Hoc Networks Based on ToN-IoT Dataset. IEEE Access 2021, 14, 37–52. [Google Scholar]
- Seonghoon, J.; Boosun, J.; Boheung, C.; Kang, K.H. Convolutional neural network-based intrusion detection system for AVTP streams in automotive Ethernet-based networks. Veh. Commun. 2021, 29, 100338. [Google Scholar]
- Francesco, P.; Andrea, A.E.; Simone, C.; Emanuele, S. Cybersecurity in Automotive: An Intrusion Detection System in Connected Vehicles. Electronics 2021, 10, 1765. [Google Scholar]
- Roh, H.; Oh, S.; Song, H.; Han, J.; Lim, S. Deep Learning-based Wireless Signal Classification in the IoT Environment. Comput. Mater. Contin. 2022, 71, 5717–5732. [Google Scholar] [CrossRef]
- Tariq, S.; Lee, S.; Woo, S.S. CANTransfer: Transfer learning-based intrusion detection on a controller area network using convolutional LSTM network. In Proceedings of the 35th Annual ACM Symposium on Applied Computing, Brno, Czech Republic, 30 March 2020; pp. 1048–1055. [Google Scholar]
- Javed, A.R.; Ur Rehman, S.; Khan, M.U.; Alazab, M.; Reddy, T. CANintelliIDS: Detecting In-Vehicle Intrusion Attacks on a Controller Area Network Using CNN and Attention-Based GRU. IEEE Trans. Netw. Sci. Eng. 2021, 8, 1456–1466. [Google Scholar] [CrossRef]
- Song, H.M.; Woo, J.; Kim, H.K. In-vehicle network intrusion detection using deep convolutional neural network. Veh. Commun. 2020, 21, 100198. [Google Scholar] [CrossRef]
- Kang, M.-J.; Kang, J.-W. Intrusion Detection System Using Deep Neural Network for In-Vehicle Network Security. PLoS ONE 2016, 11, e0155781. [Google Scholar] [CrossRef]
- Seo, E.; Song, H.M.; Kim, H.K. GIDS: GAN based Intrusion Detection System for In-Vehicle Network. In Proceedings of the 2018 16th Annual Conference on Privacy, Security and Trust (PST), Belfast, Ireland, 28–30 August 2018; pp. 1–6. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research | Proposed Solution |
|---|---|
| [6] Poolat et al. | Asymmetrical and hashing methods |
| [19] Madhumitha et al. | Enhanced KeeLoq algorithm |
| [4] Kyungho et al. | HODOR |
| [20] Jinita et al. | Challenge-response pairs |
| [22] Aldhyani et al. | CNN and LSTM |
| [23] Béatrix-May et al. | Biometric |
| [8] Husain et al. | Blockchain |
| [25] Usman et al. | ML |
| [26] Juan et al. | Contextual information |
| [10] Jing et al. | Contextual information |
| [27] Greene et al. | Timestamp-based |
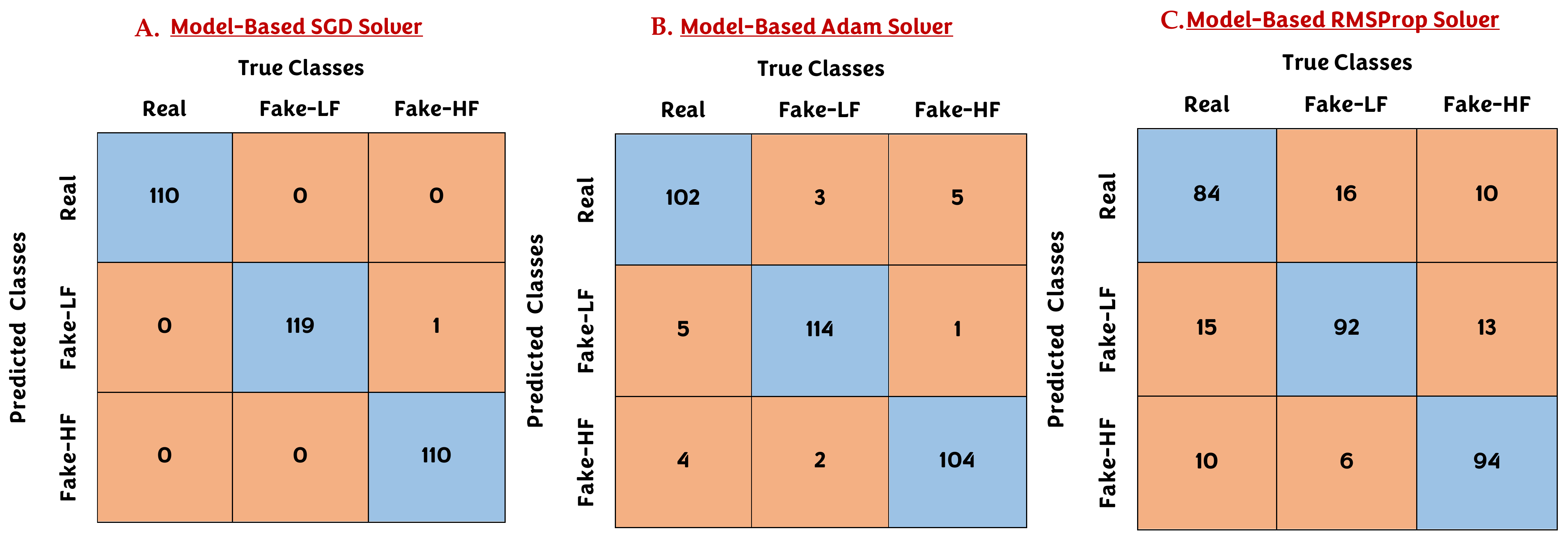
| Model | NCC | NIC | ACC | PRC | RCL | F1S | INT |
|---|---|---|---|---|---|---|---|
| SGD Based Model | 339 | 1 | 99.71% | 99.71% | 99.71% | 99.71% | 50 ms |
| Adam Based Model | 320 | 20 | 94.11% | 94.14% | 94.12% | 94.12% | 52 ms |
| RSMProp Based Model | 270 | 70 | 79.41% | 79.65% | 79.39% | 79.45% | 55 ms |
| Research | ML Model | Number of Classes | Accuracy | Precision | Recall |
|---|---|---|---|---|---|
| Roh et al. [41] | CNN-LSTM | Two | 92.03% | - | - |
| Tariq et al. [42] | CANTransfer | Two | - | 99.00% | 91.00% |
| Javed et al. [42] | CANinyelliIDS | Two | - | 93.69% | 93.91% |
| Song et al. [44] | DCNN | Two | - | 87.97% | 88.97% |
| Kang et al. [45] | DNN-DBN | Three | 98.00% | ||
| Seo et al. [46] | GIDS-CNN | Three | 98.00% | 98.00% | 98.00% |
| Proposed method | ResNet50 CNN | Three | 99.95% | 99.71% | 99.71% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abu Al-Haija, Q.; Alsulami, A.A. Detection of Fake Replay Attack Signals on Remote Keyless Controlled Vehicles Using Pre-Trained Deep Neural Network. Electronics 2022, 11, 3376. https://doi.org/10.3390/electronics11203376
Abu Al-Haija Q, Alsulami AA. Detection of Fake Replay Attack Signals on Remote Keyless Controlled Vehicles Using Pre-Trained Deep Neural Network. Electronics. 2022; 11(20):3376. https://doi.org/10.3390/electronics11203376
Chicago/Turabian StyleAbu Al-Haija, Qasem, and Abdulaziz A. Alsulami. 2022. "Detection of Fake Replay Attack Signals on Remote Keyless Controlled Vehicles Using Pre-Trained Deep Neural Network" Electronics 11, no. 20: 3376. https://doi.org/10.3390/electronics11203376
APA StyleAbu Al-Haija, Q., & Alsulami, A. A. (2022). Detection of Fake Replay Attack Signals on Remote Keyless Controlled Vehicles Using Pre-Trained Deep Neural Network. Electronics, 11(20), 3376. https://doi.org/10.3390/electronics11203376