
Stability Analysis and Robust Control Method for LCL-Type Three-Phase Four-Wire Split Capacitor Inverter Considering Zero-Sequence Loop


Abstract
1. Introduction
2. Mathematical Modeling of LCL-TFSCI
2.1. Small-Signal Mathematical Modeling of the Inverter under Multiple Perturbation
2.2. Impedance Modeling of LCL-TFSCI
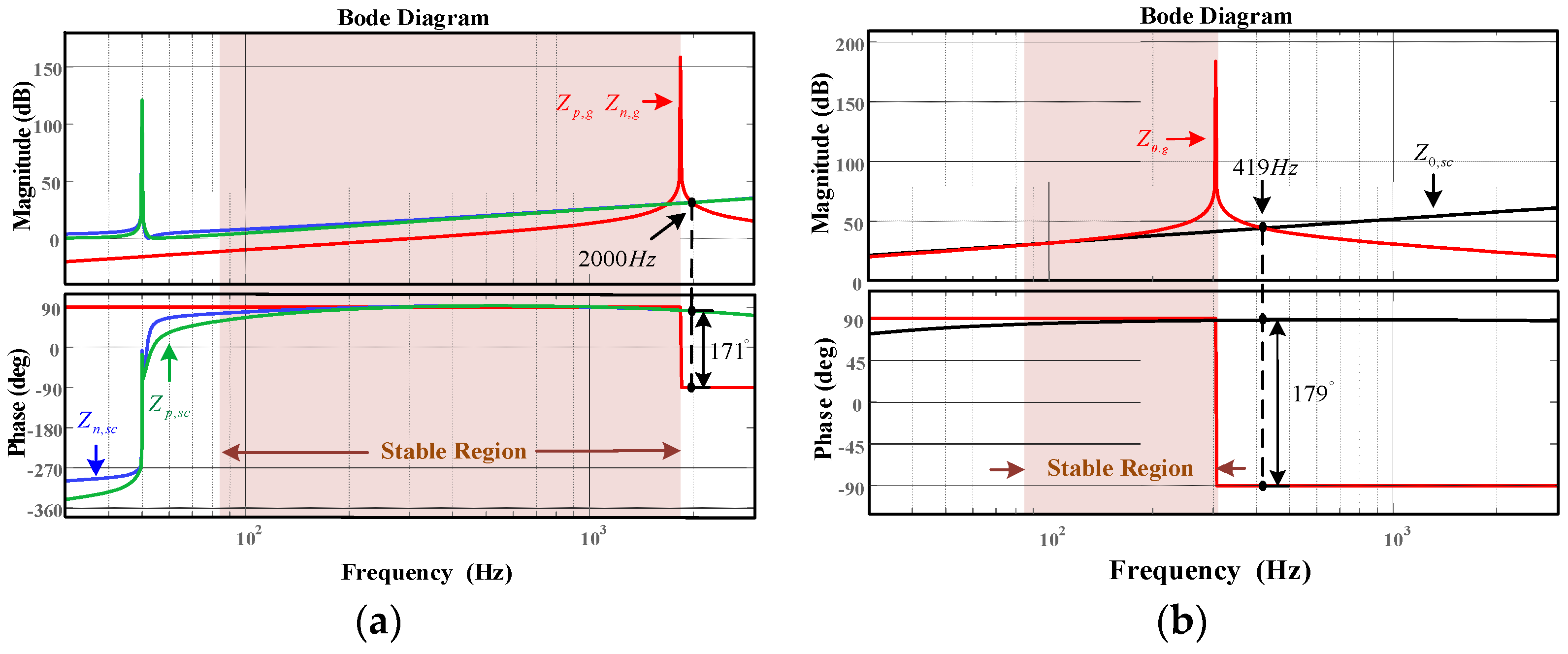
3. Stability Analysis of LCL-TFSCI
4. Research on an Oscillation-Suppression Method for LCL-TFSCI
4.1. Research on an Impedance-Reshaping Method for Inverters
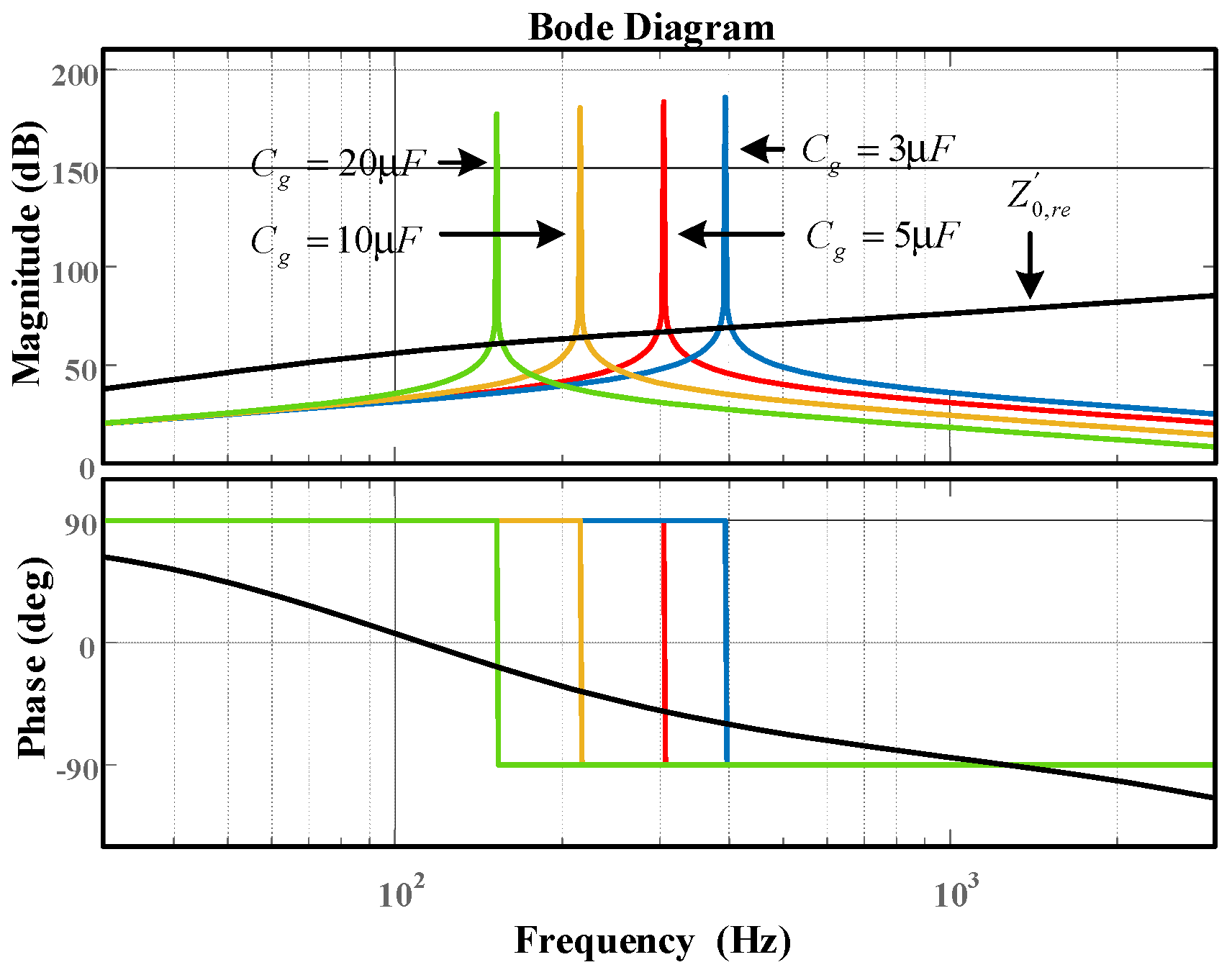
4.2. Parameter Analysis
5. Simulation and Experimental Verification
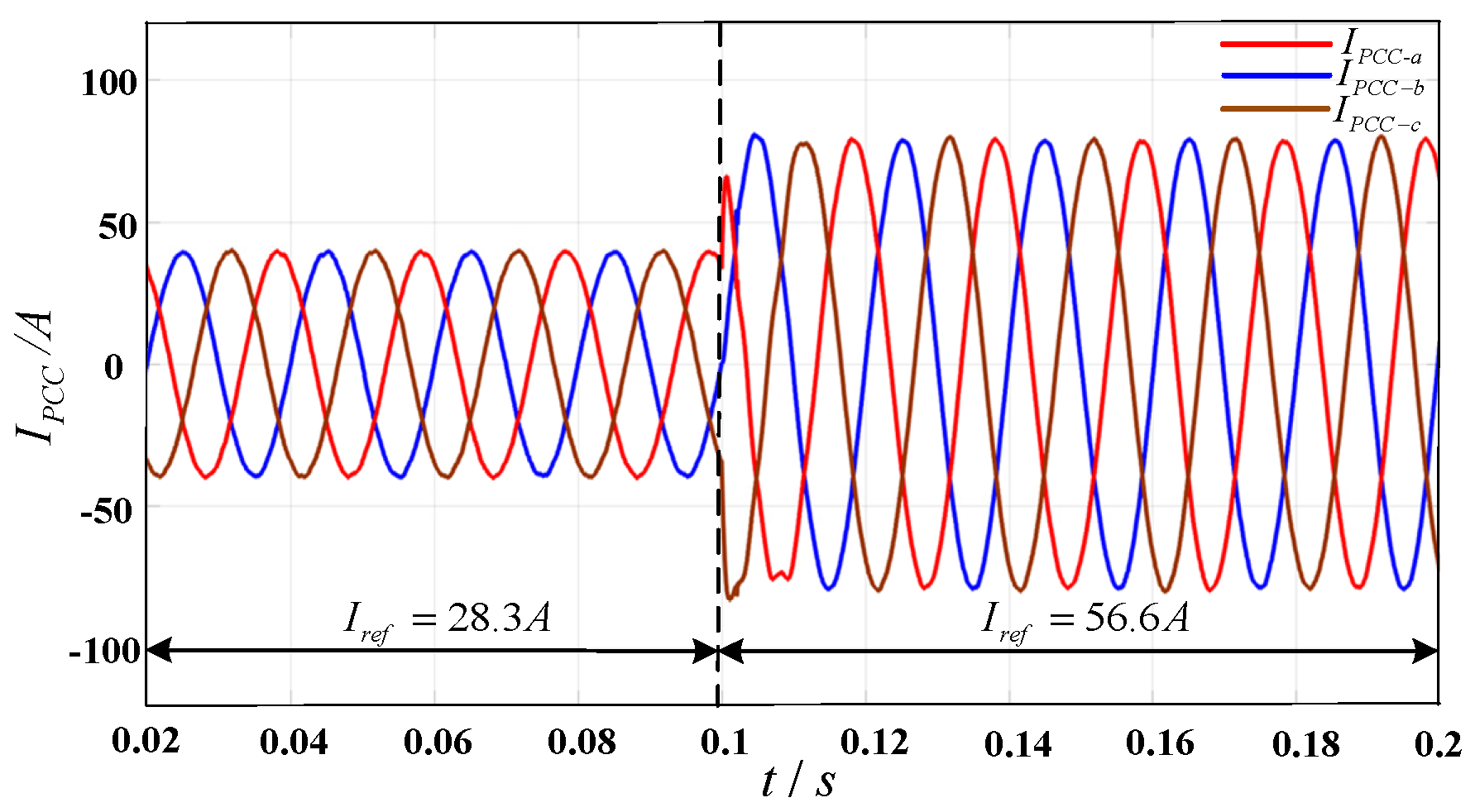
5.1. Simulation Verification
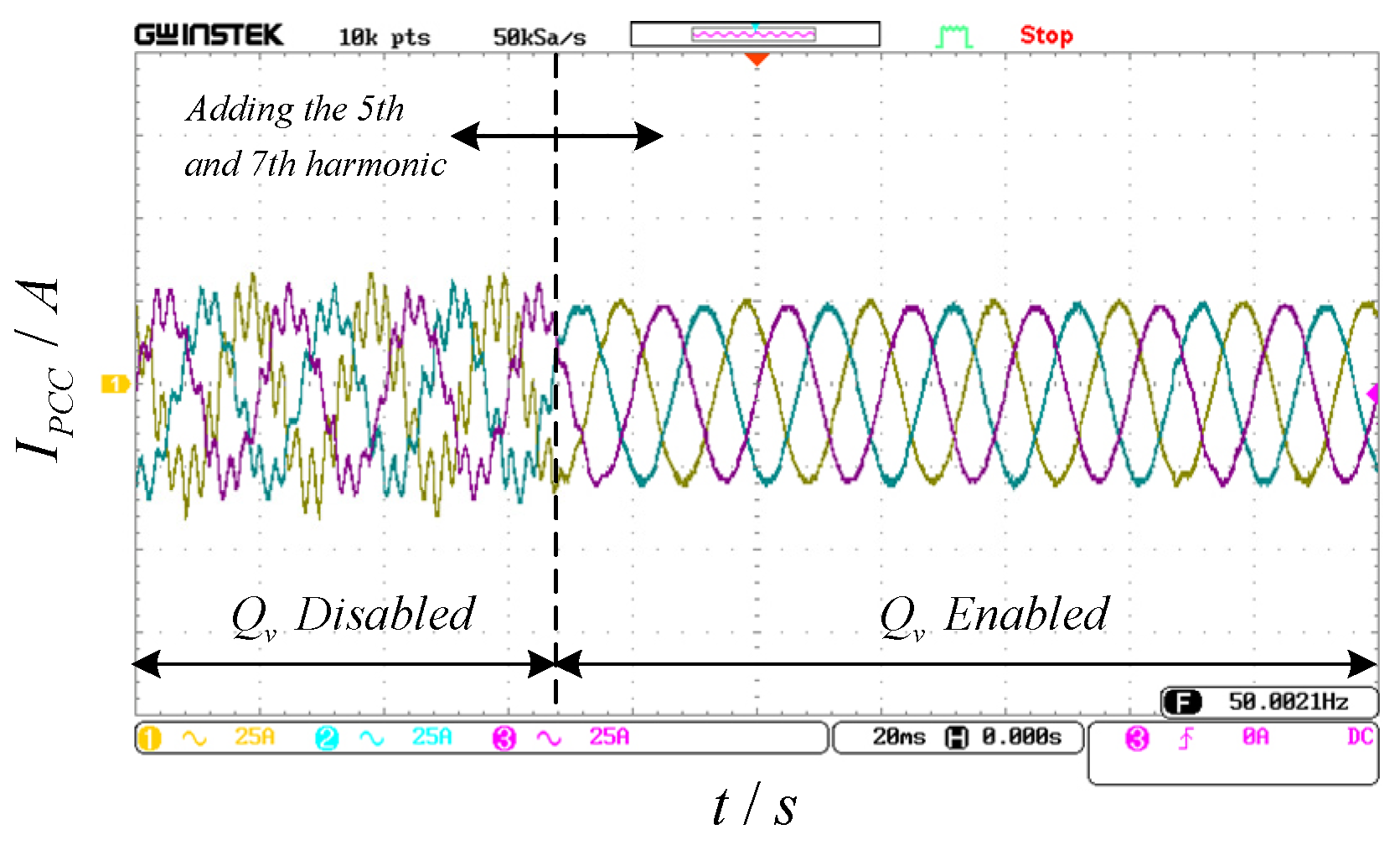
5.2. Experimental Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| LCL-TFSCI | LCL-type three-phase four-wire split capacitor inverter |
| TFSCI | Three-phase four-wire split capacitor inverter |
| SRF-PLL | Synchronous reference frame phase-locked loop |
| PLL | Phase-locked loop |
| PM | Phase margin |
| PCC | Point of common coupling |
| THD | Total harmonic distortion |
| SCR | Short-circuit ratio |
| RTDS | Real time digital simulation system |
| FFT | Fast Fourier transform |
References
- Zhang, Z.; Ding, W. Improved active disturbance rejection control strategy for LCL-Type grid-connected inverters based on the backstepping method. Electronics 2022, 11, 2237. [Google Scholar] [CrossRef]
- Lin, Z.; Ruan, X.; Jia, L.; Zhao, W.; Liu, H.; Rao, P. Optimized design of the neutral inductor and filter inductors in three-phase four-wire inverter with split DC-link capacitors. IEEE Trans. Power Electron. 2019, 34, 247–262. [Google Scholar] [CrossRef]
- Mandrioli, R.; Hammami, M.; Viatkin, A.; Barbone, R.; Pontara, D.; Ricco, M. Phase and neutral current ripple analysis in three-phase four-wire split-capacitor grid converter for EV chargers. Electronics 2021, 10, 1016. [Google Scholar] [CrossRef]
- Zhou, X.; Tang, F.; Loh, P.C.; Jin, X.; Cao, W. Four-leg converters with improved common current sharing and selective voltage-quality enhancement for islanded microgrids. IEEE Trans. Power Deliv. 2016, 31, 522–531. [Google Scholar] [CrossRef]
- Hirve, S.; Chatterjee, K.; Fernandes, B.G.; Imayavaramban, M.; Dwari, S. PLL-less active power filter based on one-cycle control for compensating unbalanced loads in three-phase four-wire system. IEEE Trans. Power Deliv. 2007, 22, 2457–2465. [Google Scholar] [CrossRef]
- De Morais, A.S.; Lessa Tofoli, F.; Barbi, I. Modeling, digital control, and implementation of a three-phase four-wire power converter used as a power redistribution device. IEEE Trans. Ind. Inf. 2016, 12, 1035–1042. [Google Scholar] [CrossRef]
- Kerekes, T.; Teodorescu, R.; Liserre, M.; Klumpner, C.; Sumner, M. Evaluation of three-phase transformerless photovoltaic inverter topologies. IEEE Trans. Power Electron. 2009, 24, 2202–2211. [Google Scholar] [CrossRef]
- Pichan, M.; Rastegar, H. Sliding-mode control of four-leg inverter with fixed switching frequency for uninterruptible power supply applications. IEEE Trans. Ind. Electron. 2017, 64, 6805–6814. [Google Scholar] [CrossRef]
- Carlos, G.A.d.A.; Jacobina, C.B.; Dos Santos, E.C. Investigation on dynamic voltage restorers with two DC links and series converters for three-phase four-wire systems. IEEE Trans. Ind. Appl. 2016, 52, 1608–1620. [Google Scholar] [CrossRef]
- Hadavi, S.; Mansour, M.Z.; Bahrani, B. Optimal allocation and sizing of synchronous condensers in weak grids with increased penetration of wind and solar farms. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 11, 199–209. [Google Scholar] [CrossRef]
- Xu, H.; Yu, C.; Mao, F.; Hu, T.; Wu, Z.; Wang, Q. Research on direct power control strategy based on voltage controlled virtual synchronous generator. Electronics 2021, 10, 2415. [Google Scholar] [CrossRef]
- Elkholy, A.M.; Taha, I.B.M.; Kamel, S.; El-Nemr, M.K. Grid synchronization enhancement of distributed generators using an adaptive phase-locked loop tuning system. Electronics 2022, 11, 702. [Google Scholar] [CrossRef]
- Song, Y.; Blaabjerg, F.; Wang, X. Analysis and active damping of multiple high frequency resonances in DFIG System. IEEE Trans. Energy Convers. 2017, 32, 369–381. [Google Scholar] [CrossRef]
- Pang, B.; Wu, C.; Nian, H.; Blaabjerg, F. Damping method of high-frequency resonance for stator current controlled DFIG system under parallel compensation grid. IEEE Trans. Power Electron. 2020, 35, 10260–10270. [Google Scholar] [CrossRef]
- Song, Y.; Blaabjerg, F. Overview of DFIG-based wind power system resonances under weak networks. IEEE Trans. Power Electron. 2017, 32, 4370–4394. [Google Scholar] [CrossRef]
- Sainz, L.; Cheah-Mane, M.; Monjo, L.; Liang, J.; Gomis-Bellmunt, O. Positive-net-damping stability criterion in grid-connected VSC systems. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1499–1512. [Google Scholar] [CrossRef]
- Nian, H.; Pang, B. Stability and power quality enhancement strategy for DFIG system connected to harmonic grid with parallel compensation. IEEE Trans. Energy Convers. 2019, 34, 1010–1022. [Google Scholar] [CrossRef]
- Wang, X.; Blaabjerg, F.; Loh, P.C. Virtual RC damping of LCL-filtered voltage source converters with extended selective harmonic compensation. IEEE Trans. Power Electron. 2015, 30, 4726–4737. [Google Scholar] [CrossRef]
- Xu, J.; Xie, S.; Tang, T. Improved control strategy with grid-voltage feedforward for LCL-filter-based inverter connected to weak grid. IET Power Electron. 2014, 7, 2660–2671. [Google Scholar] [CrossRef]
- Cespedes, M.; Sun, J. Adaptive control of grid-connected inverters based on online grid impedance measurements. IEEE Trans. Sustain Energy. 2014, 5, 516–523. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, Y.; Wang, S.; Chen, J.; Gong, C. Impedance-phased dynamic control method for grid-connected inverters in a weak Grid. IEEE Trans. Power Electron. 2017, 32, 274–283. [Google Scholar] [CrossRef]
- Huang, L.; Wu, C.; Zhou, D.; Blaabjerg, F. A double-PLLs-based impedance reshaping method for extending stability range of grid-following inverter under weak grid. IEEE Trans. Power Electron. 2022, 37, 4091–4104. [Google Scholar] [CrossRef]
- Wang, K.; Yuan, X.; Wang, H.; Li, S.; Wu, X. Mitigation of subsynchronous resonance for grid-connected inverters in series-compensated weak power grids through observed q-axis grid voltage feedback. IEEE Trans. Ind. Electron. 2022, 69, 10236–10248. [Google Scholar] [CrossRef]
- Rygg, A.; Molinas, M.; Zhang, C.; Cai, X. A modified sequence-domain impedance definition and its equivalence to the dq-domain impedance definition for the stability analysis of AC power electronic systems. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1383–1396. [Google Scholar] [CrossRef]
- Bakhshizadeh, M.K.; Wang, X.; Blaabjerg, F.; Hjerrild, J.; Kocewiak, Ł.; Bak, C.L.; Hesselbæk, B. Couplings in phase domain impedance modeling of grid-connected converters. IEEE Trans. Power Electron. 2016, 31, 6792–6796. [Google Scholar]
- Shah, S.; Parsa, L. Impedance modeling of three-phase voltage source converters in dq, sequence, and phasor domains. IEEE Trans. Energy Convers. 2017, 32, 1139–1150. [Google Scholar] [CrossRef]
- Wang, X.; Li, Y.W.; Blaabjerg, F.; Loh, P.C. Virtual-impedance-based control for voltage-source and current-source converters. IEEE Trans. Power Electron. 2015, 30, 7019–7037. [Google Scholar] [CrossRef]
- Fang, J.; Li, X.; Li, H.; Tang, Y. Stability improvement for three-phase grid-connected converters through impedance reshaping in quadrature-axis. IEEE Trans. Power Electron. 2018, 33, 8365–8375. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, X.; Zhang, Y.; Chen, J.; Gong, C. Impedance modeling of three-phase grid-connected inverters and analysis of interaction stability in grid-connected system. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 3606–3612. [Google Scholar] [CrossRef]
- Nian, H.; Liao, Y.; Li, M.; Sun, D.; Xu, Y.; Hu, B. Impedance modeling and stability analysis of three-phase four-leg grid-connected inverter considering zero-sequence. IEEE Access 2021, 9, 83676–83687. [Google Scholar] [CrossRef]
- Cespedes, M.; Sun, J. Impedance modeling and analysis of grid-connected voltage-source converters. IEEE Trans. Power Electron. 2014, 29, 1254–1261. [Google Scholar] [CrossRef]
- Wang, X.; Harnefors, L.; Blaabjerg, F. Unified impedance model of grid-connected voltage-source converters. IEEE Trans. Power Electron. 2018, 33, 1775–1787. [Google Scholar] [CrossRef]
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification | Application Method | Shortcoming |
|---|---|---|
| stability improvement methods without considering PLL | robust active damping and current control method | poor availability in weak grid |
| grid-voltage feed-forward control method | introduction of negative phase shift | |
| adaptive method based on impedance measurement | dependent on impedance detection accuracy | |
| stability improvement methods considering PLL | impedance-reshaping method based on virtual controller and impedance controller | increased control complexity and inability to reshape within wide frequency range |
| adaptive feed-forward control method | without analyzing zero-sequence loop |
| Symbol | Parameter | Value |
|---|---|---|
| Udc | DC-side voltage | 700 V |
| Po | rated power | 40 kW |
| f1 | fundamental frequency | 50 Hz |
| C | filter capacitors | 15 μF |
| kpp | proportion coefficient of PLL | 0.16 |
| kip | integral coefficient of PLL | 0.25 |
| Ug | grid voltage | 220 V |
| fs | switching frequency | 10 kHz |
| L1 | inverter-side inductance | 700 μH |
| L2 | grid-side inductance | 110 μH |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Cao, T.; Cai, Z.; Xia, X.; Jia, C.; Dong, X.; Zhang, S. Stability Analysis and Robust Control Method for LCL-Type Three-Phase Four-Wire Split Capacitor Inverter Considering Zero-Sequence Loop. Electronics 2022, 11, 3286. https://doi.org/10.3390/electronics11203286
Yang L, Cao T, Cai Z, Xia X, Jia C, Dong X, Zhang S. Stability Analysis and Robust Control Method for LCL-Type Three-Phase Four-Wire Split Capacitor Inverter Considering Zero-Sequence Loop. Electronics. 2022; 11(20):3286. https://doi.org/10.3390/electronics11203286
Chicago/Turabian StyleYang, Longyue, Tian Cao, Zhipeng Cai, Xuejing Xia, Chenxi Jia, Xinwei Dong, and Shuyuan Zhang. 2022. "Stability Analysis and Robust Control Method for LCL-Type Three-Phase Four-Wire Split Capacitor Inverter Considering Zero-Sequence Loop" Electronics 11, no. 20: 3286. https://doi.org/10.3390/electronics11203286
APA StyleYang, L., Cao, T., Cai, Z., Xia, X., Jia, C., Dong, X., & Zhang, S. (2022). Stability Analysis and Robust Control Method for LCL-Type Three-Phase Four-Wire Split Capacitor Inverter Considering Zero-Sequence Loop. Electronics, 11(20), 3286. https://doi.org/10.3390/electronics11203286