
An Application-Oriented Method Based on Cooperative Map Matching for Improving Vehicular Positioning Accuracy


Abstract
:1. Introduction
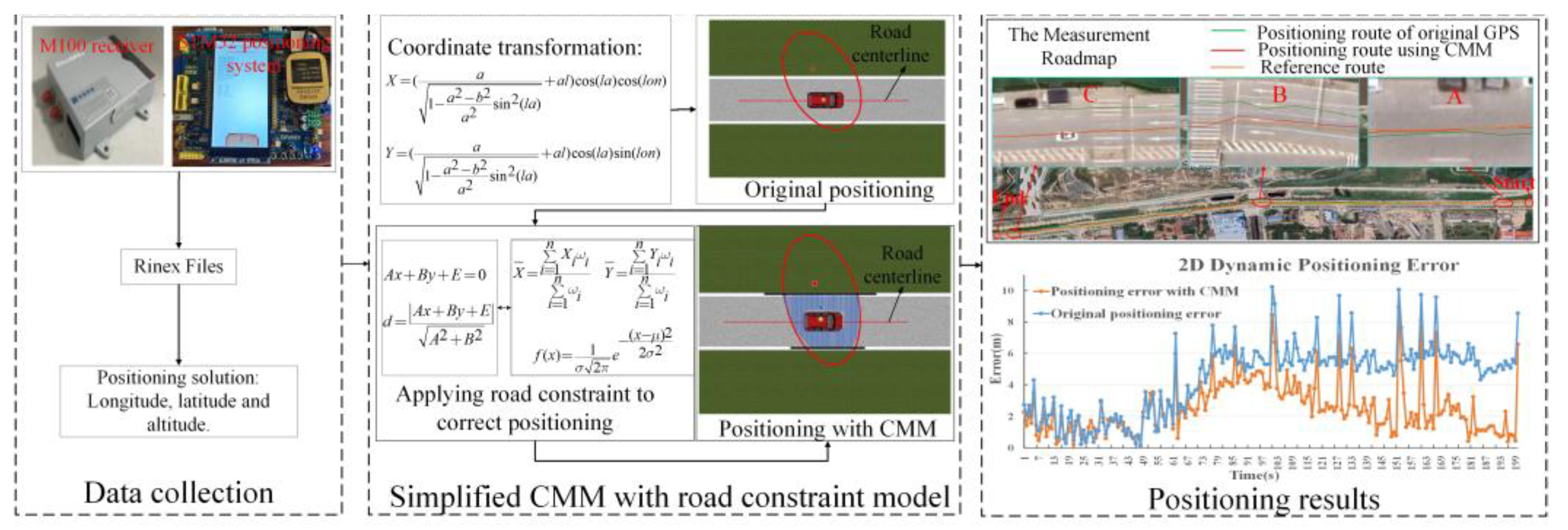
- A CMM method is designed to optimize the positioning effect combined with high-precision digital map. The road coordinate system is established according to the map, and the road constraints are modeled, which realizes the analysis and description of the position constraints, simplifies the calculation complexity, and facilitates practical application.
- A low-cost GPS/BDS integrated positioning system, which can realize real-time vehicular positioning and store the positioning data, is designed and implemented.
- The vehicular positioning data are collected in the real traffic scene, and the effectiveness of the proposed CMM method is verified on the collected dataset.
2. Cooperative Map Matching Method
2.1. Method Description
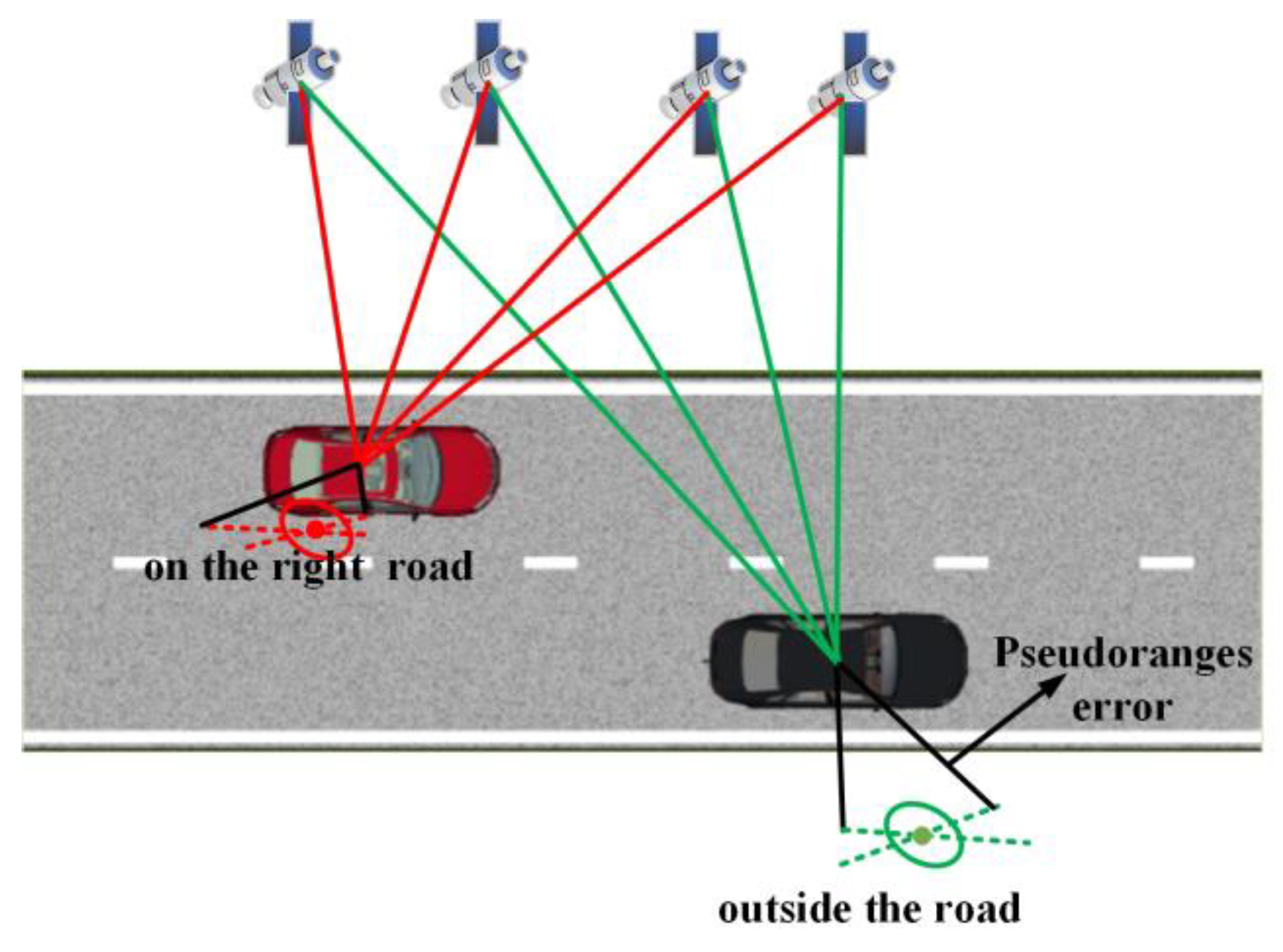
2.2. Pseudoranges Calculation
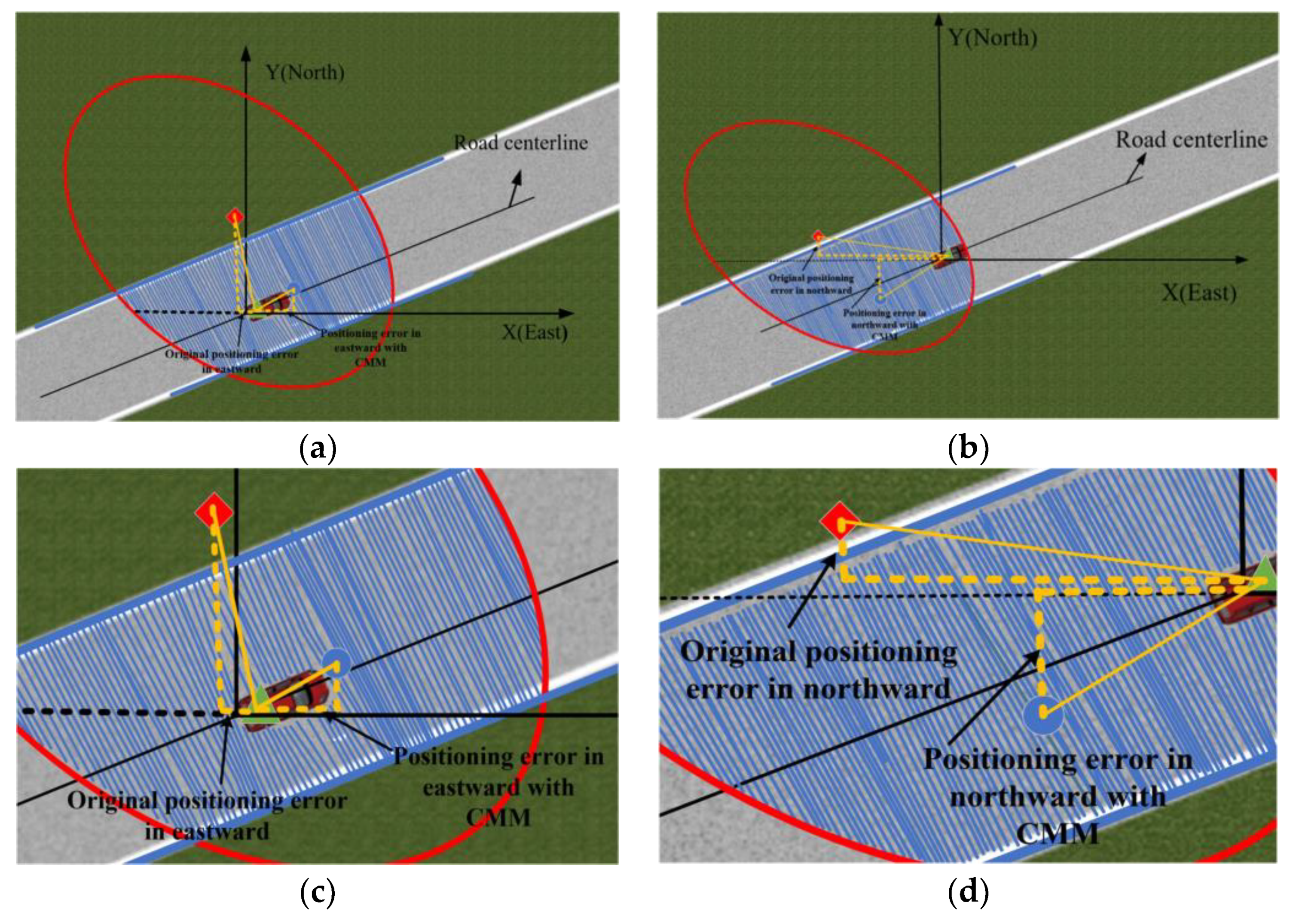
2.3. Simplified CMM with Road Constraint Model
3. Experimental Results and Discussion
3.1. Experimental Environment
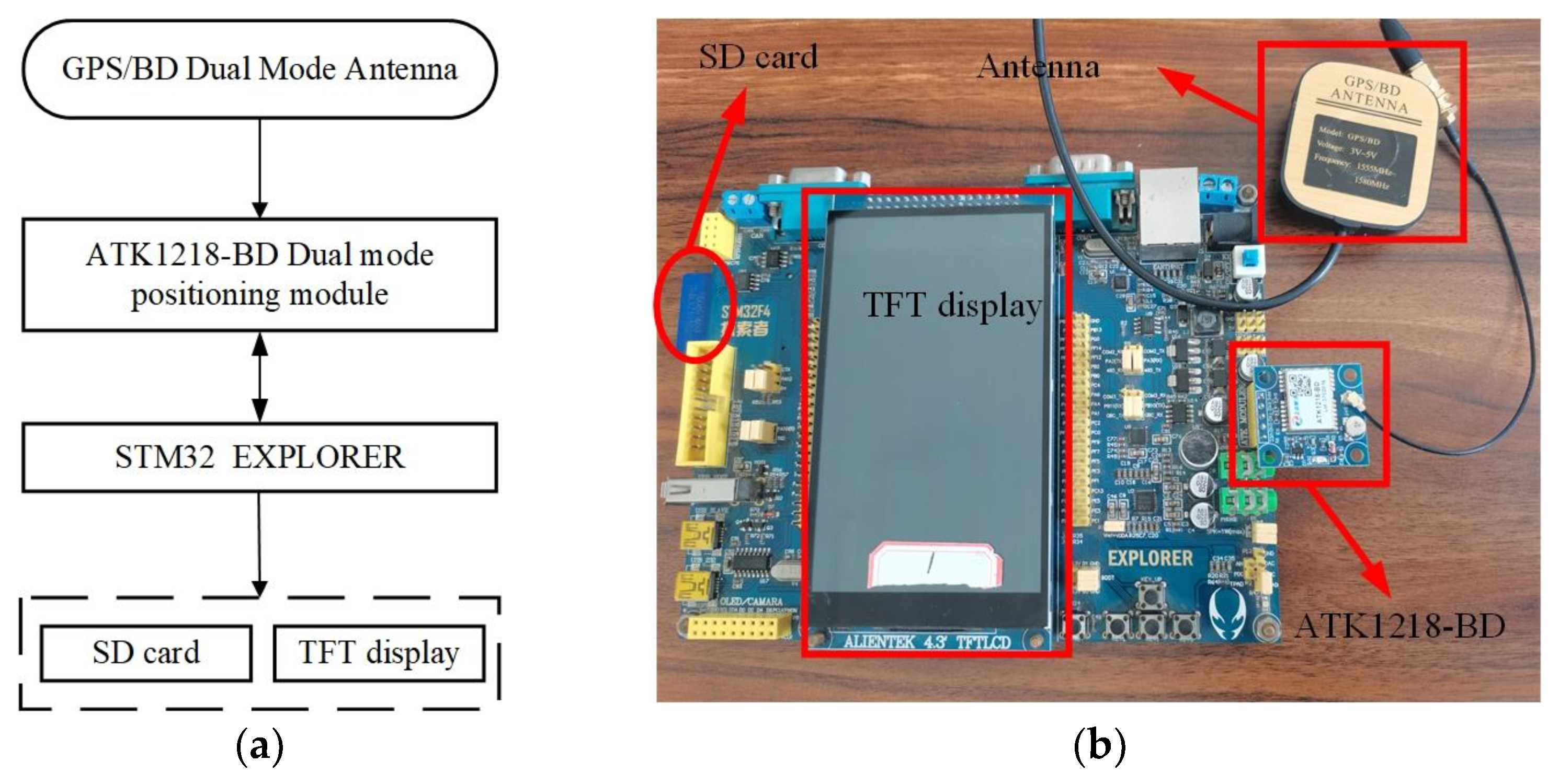
3.1.1. Positioning System Hardware Design
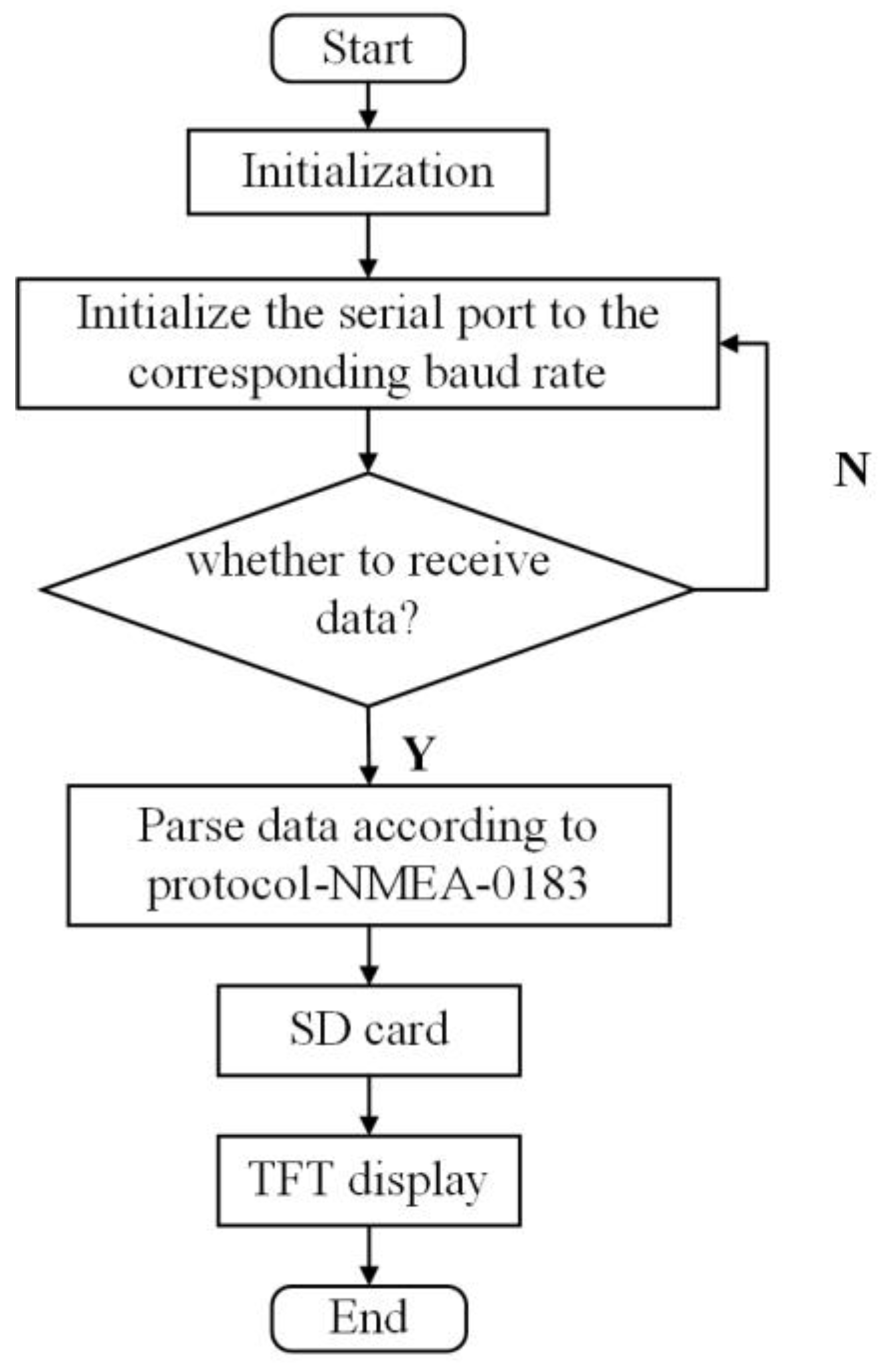
3.1.2. Positioning System Software Design
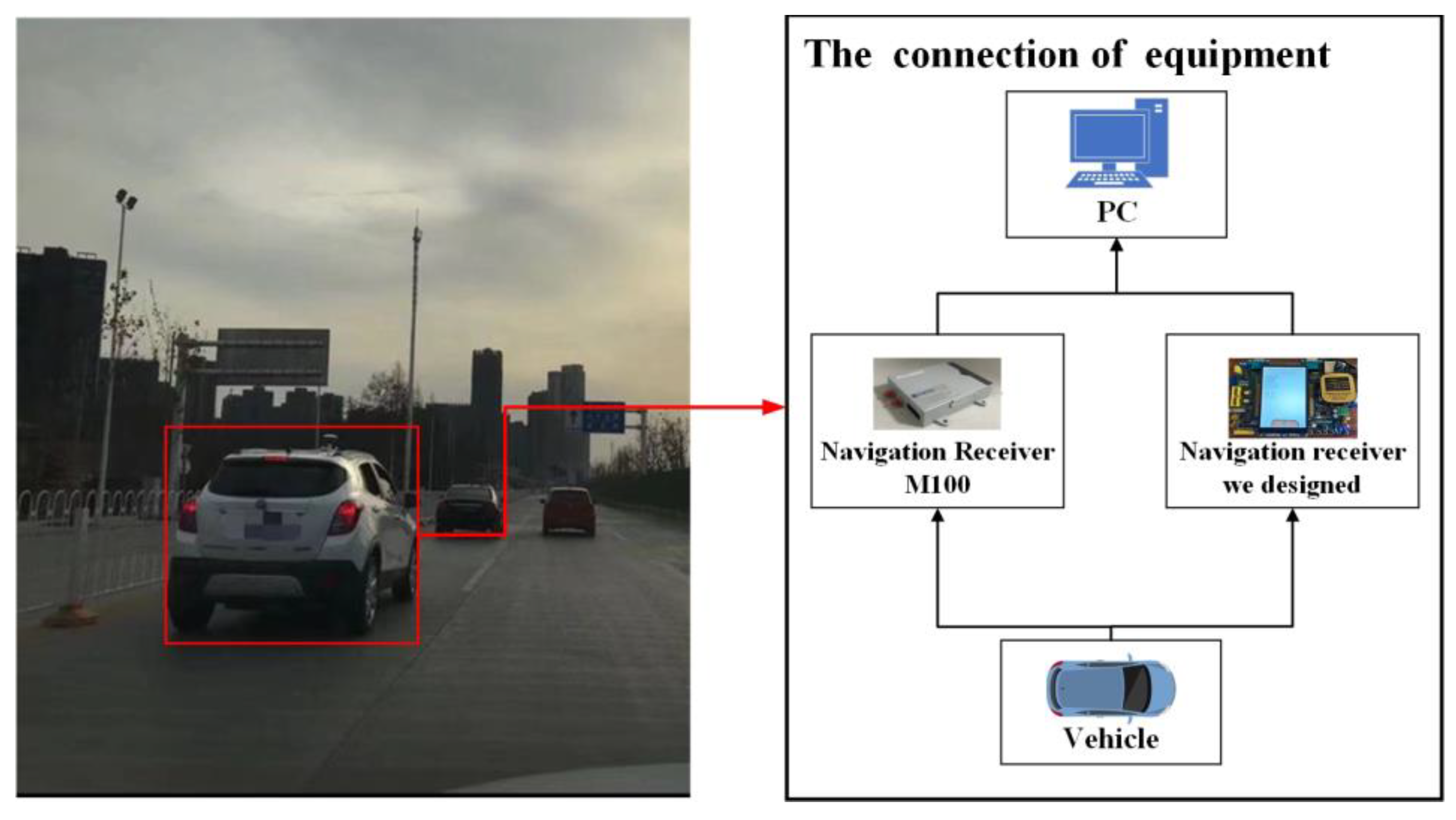
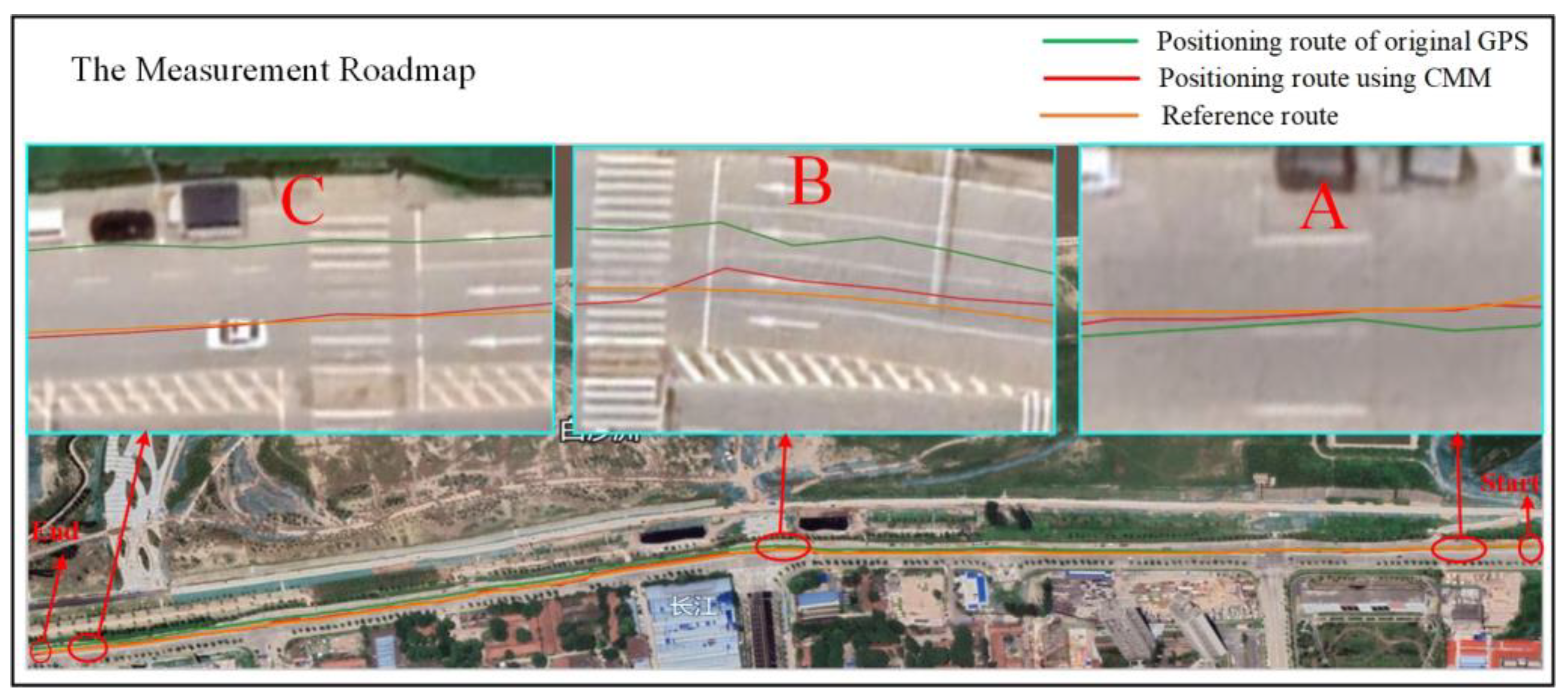
3.1.3. Test Environment
3.2. Experimental Results and Analysis
3.2.1. Evaluation Indicators
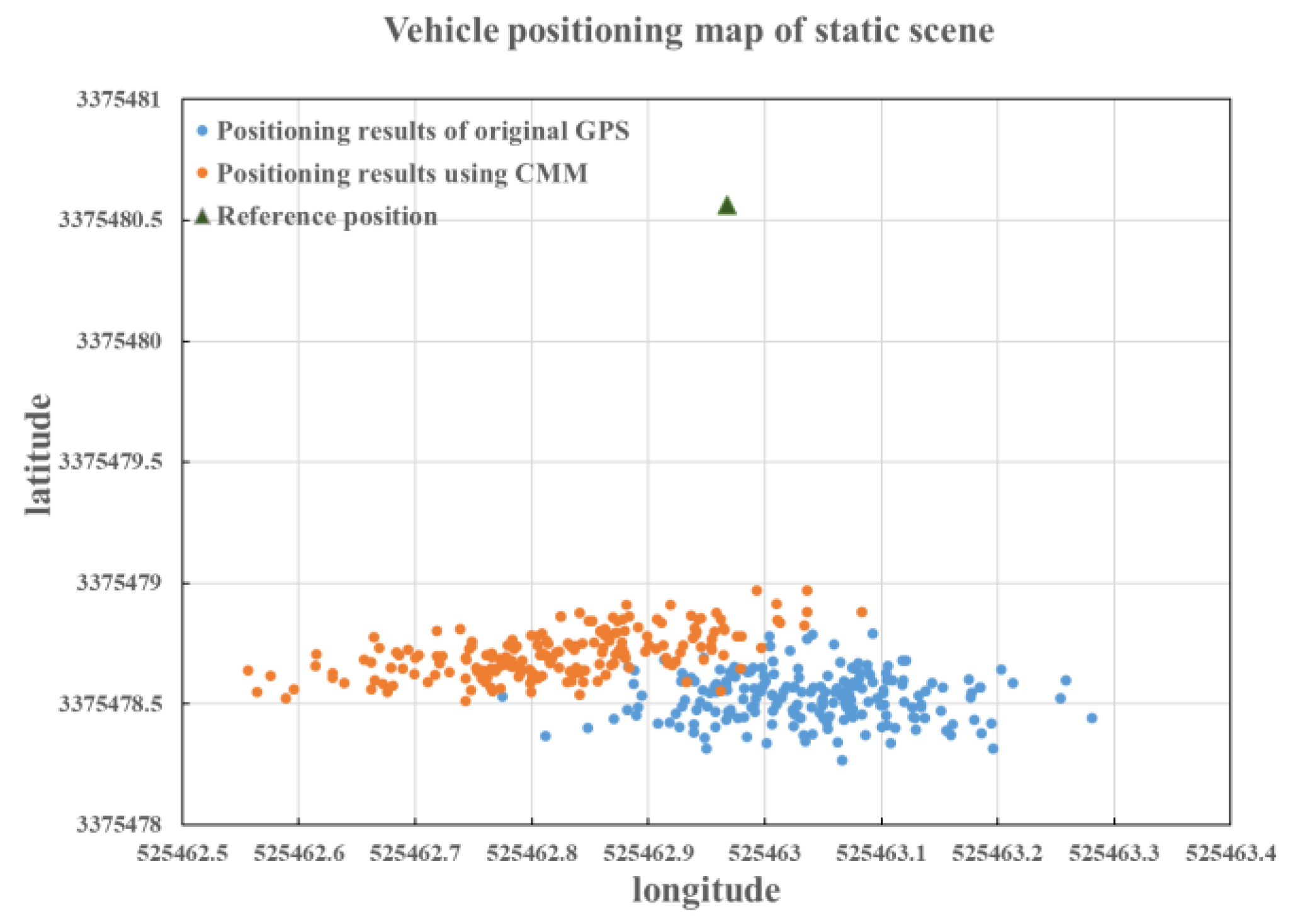
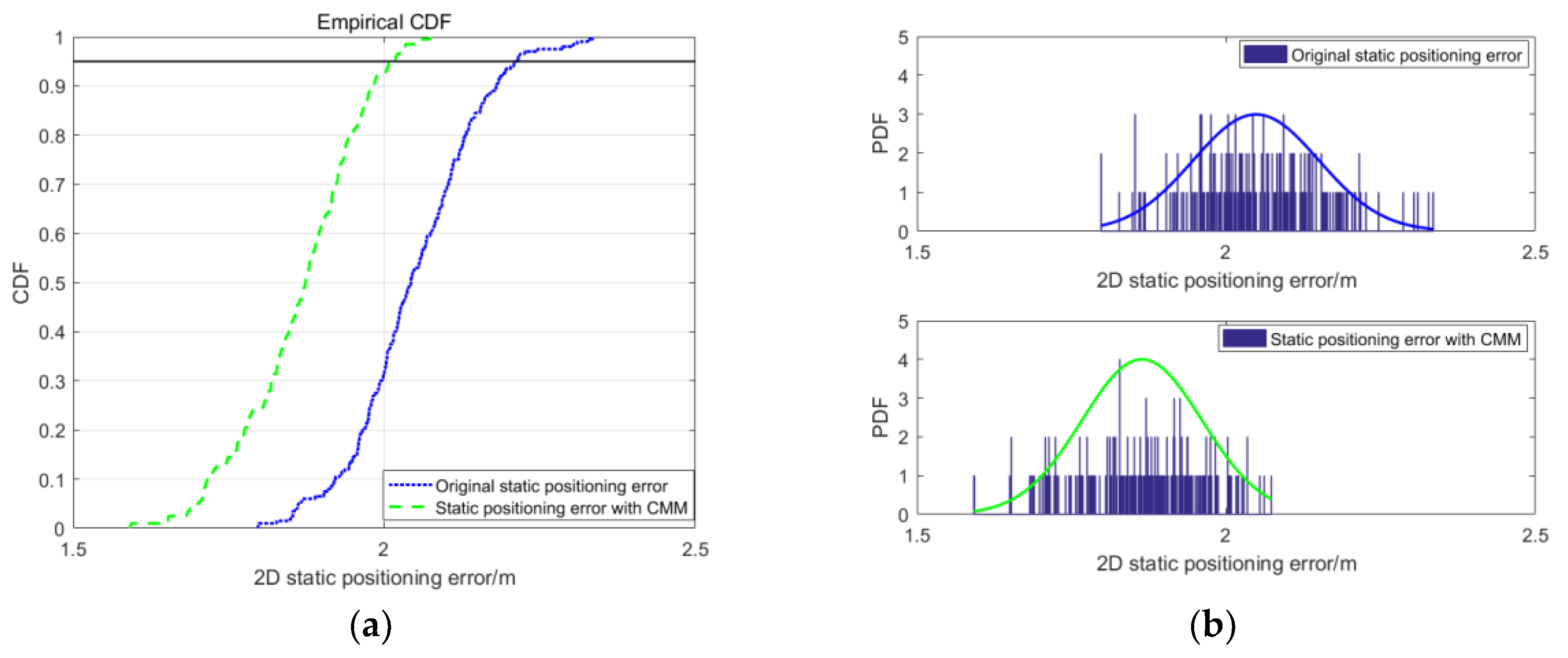
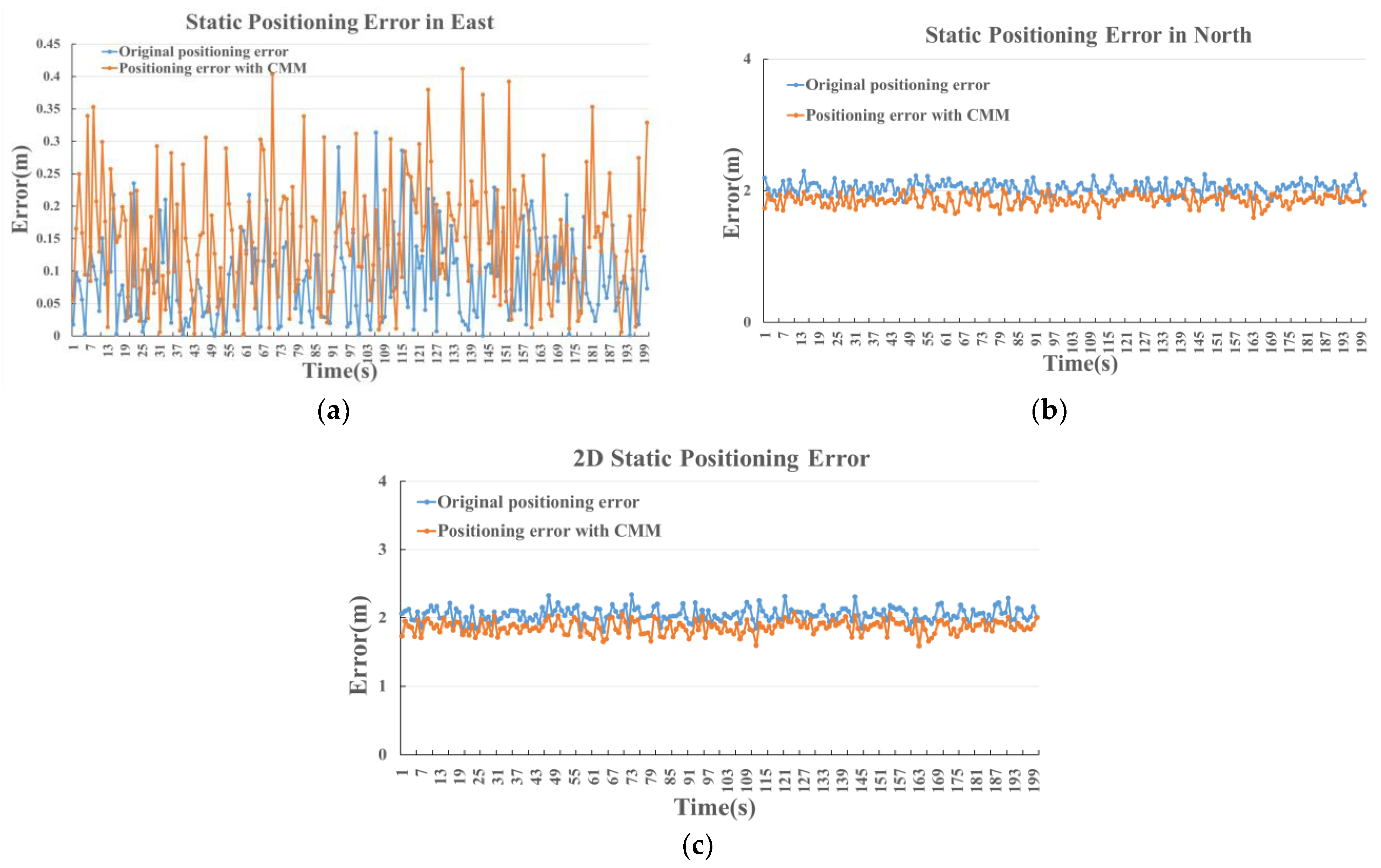
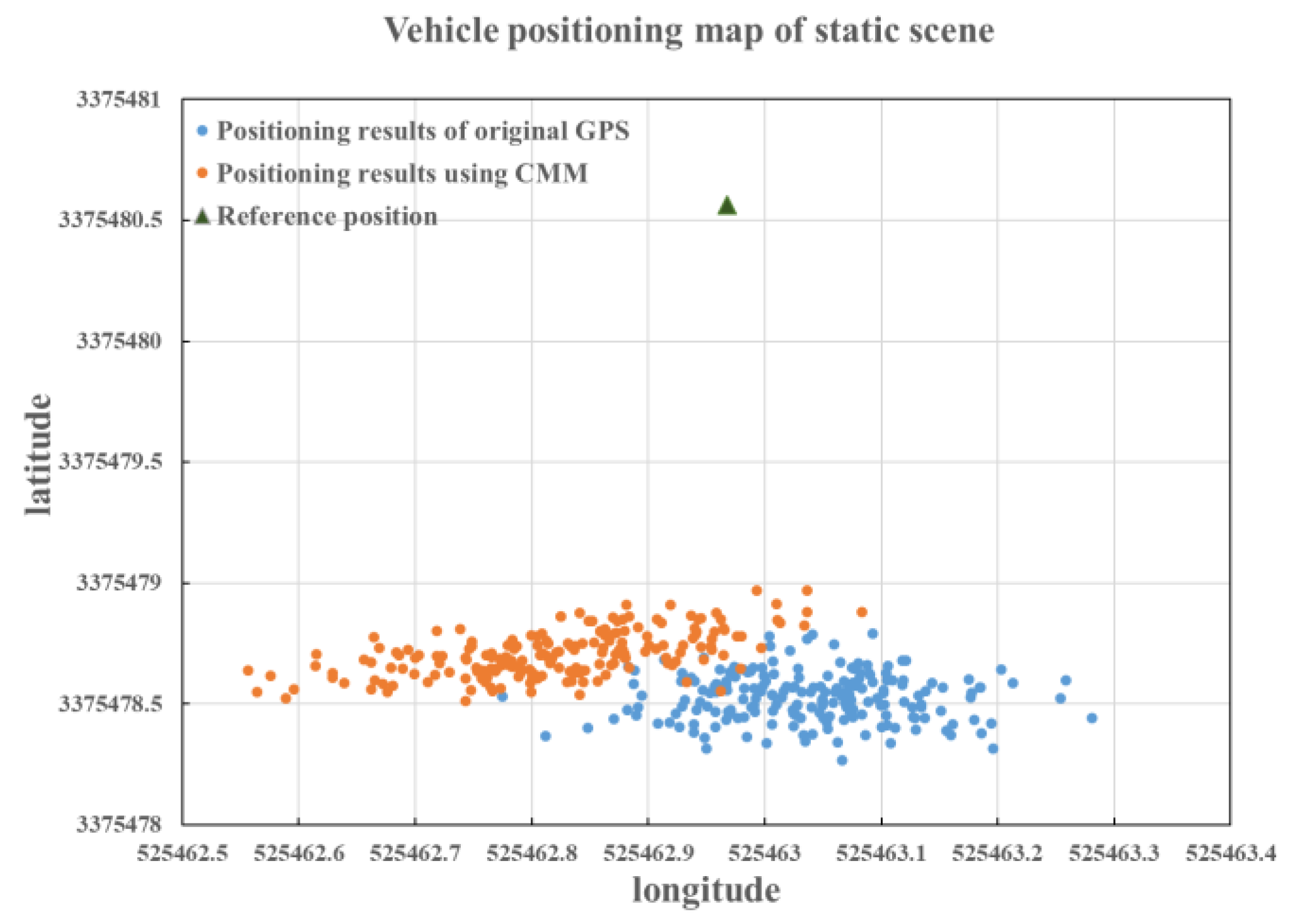
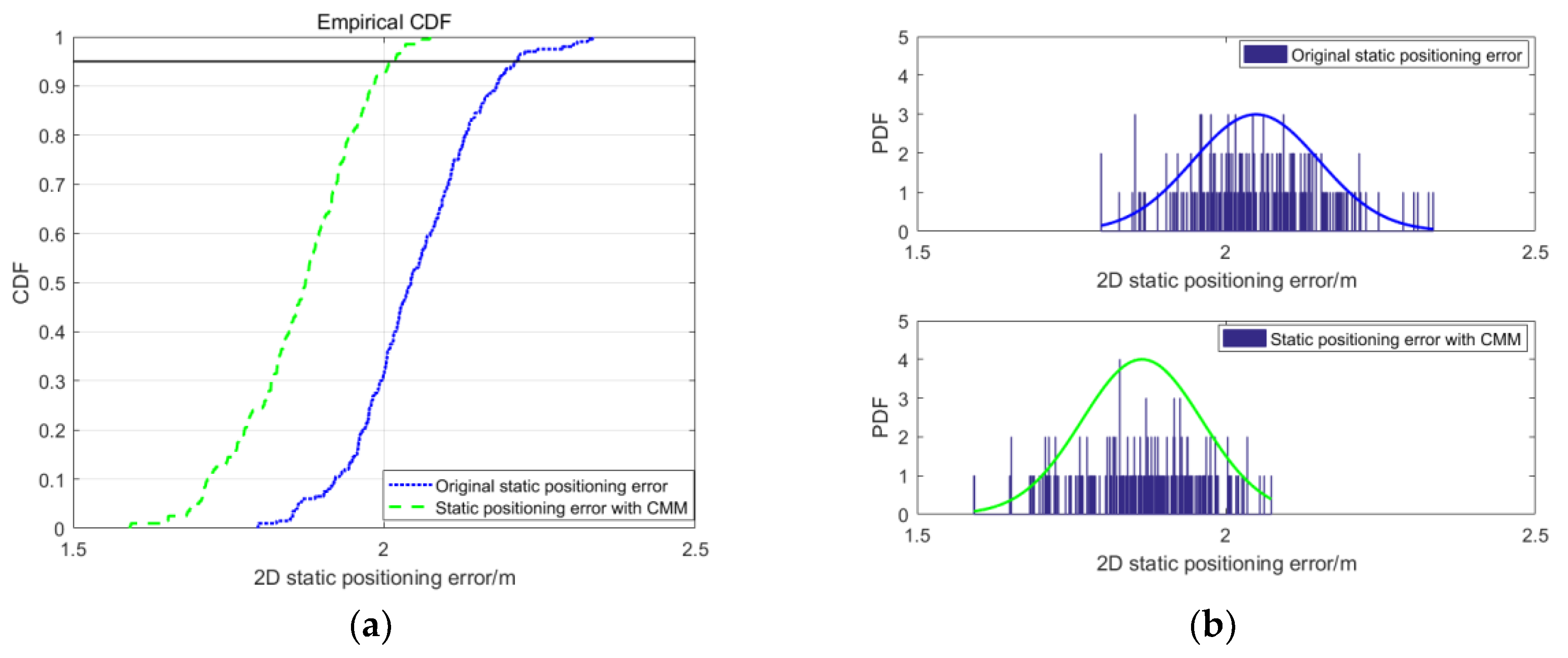
3.2.2. Static Experiment
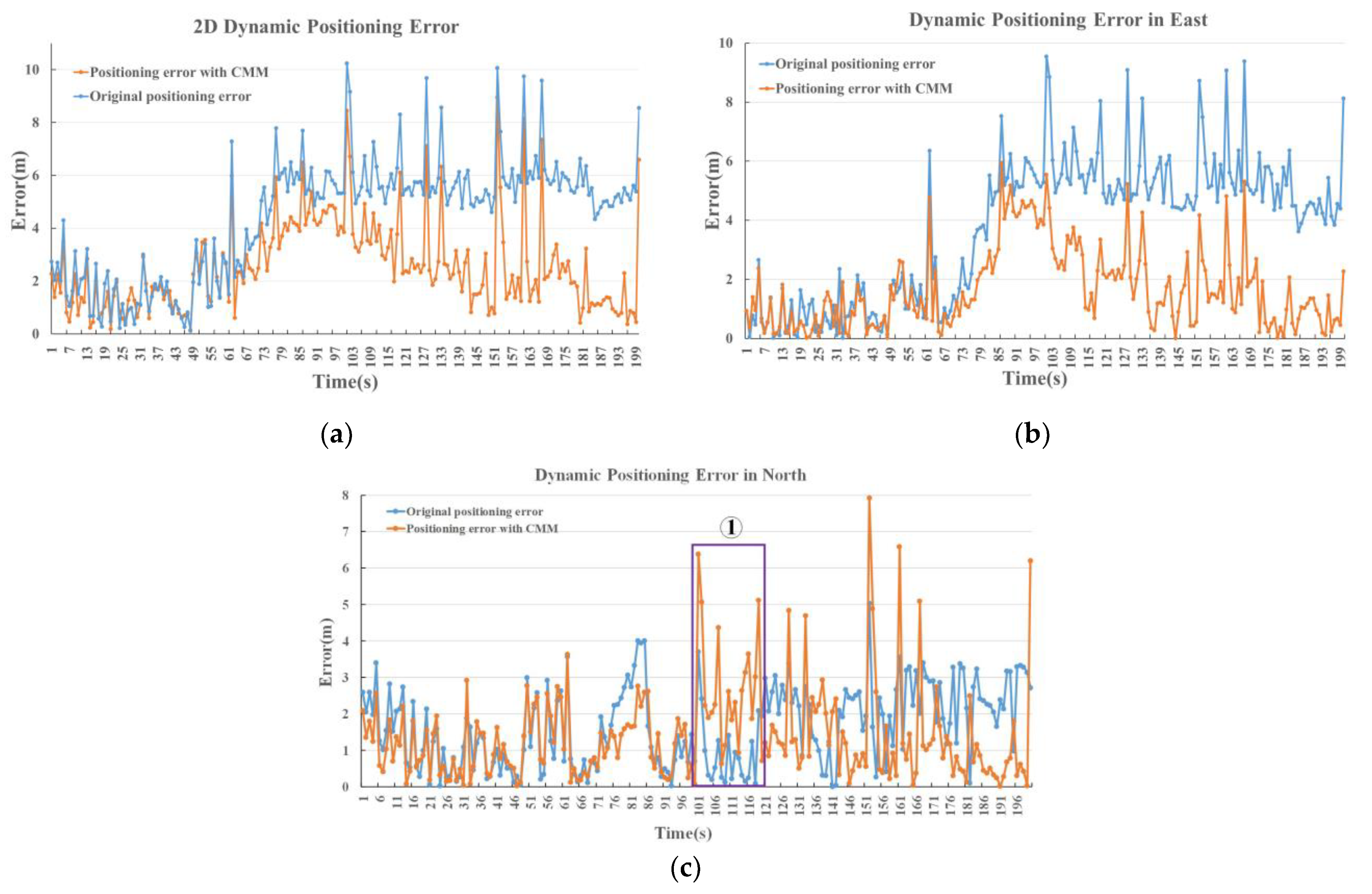
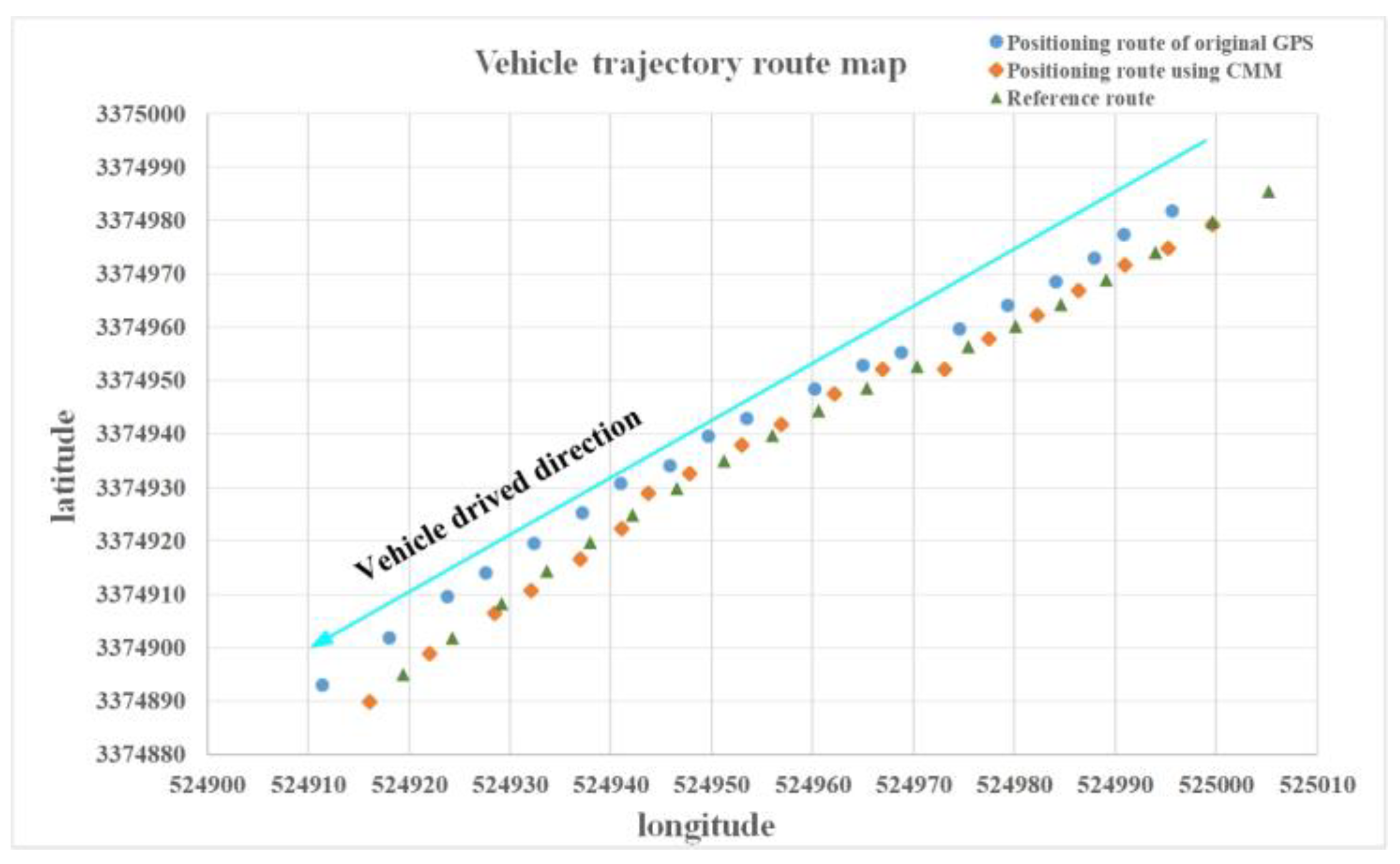
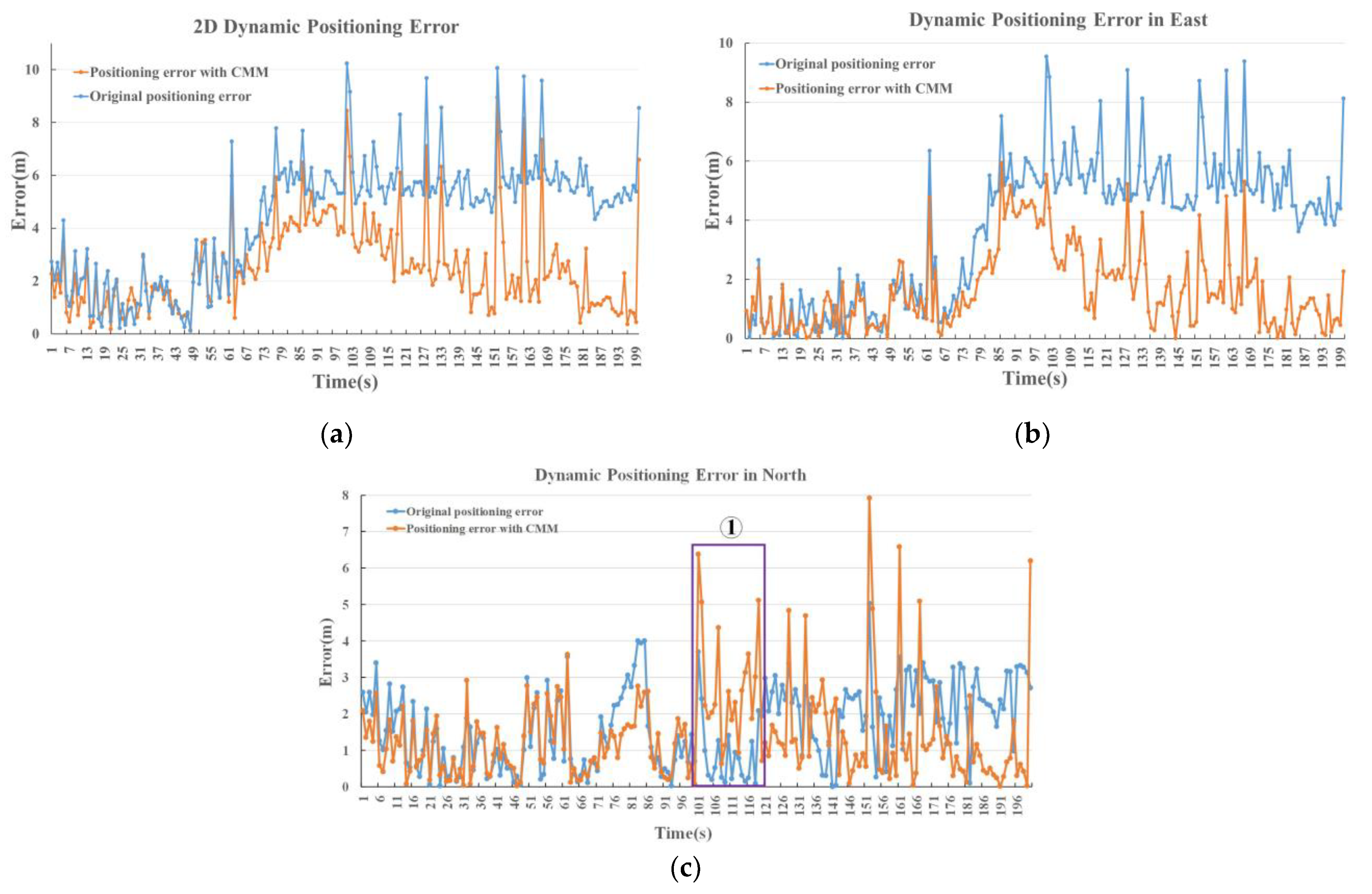
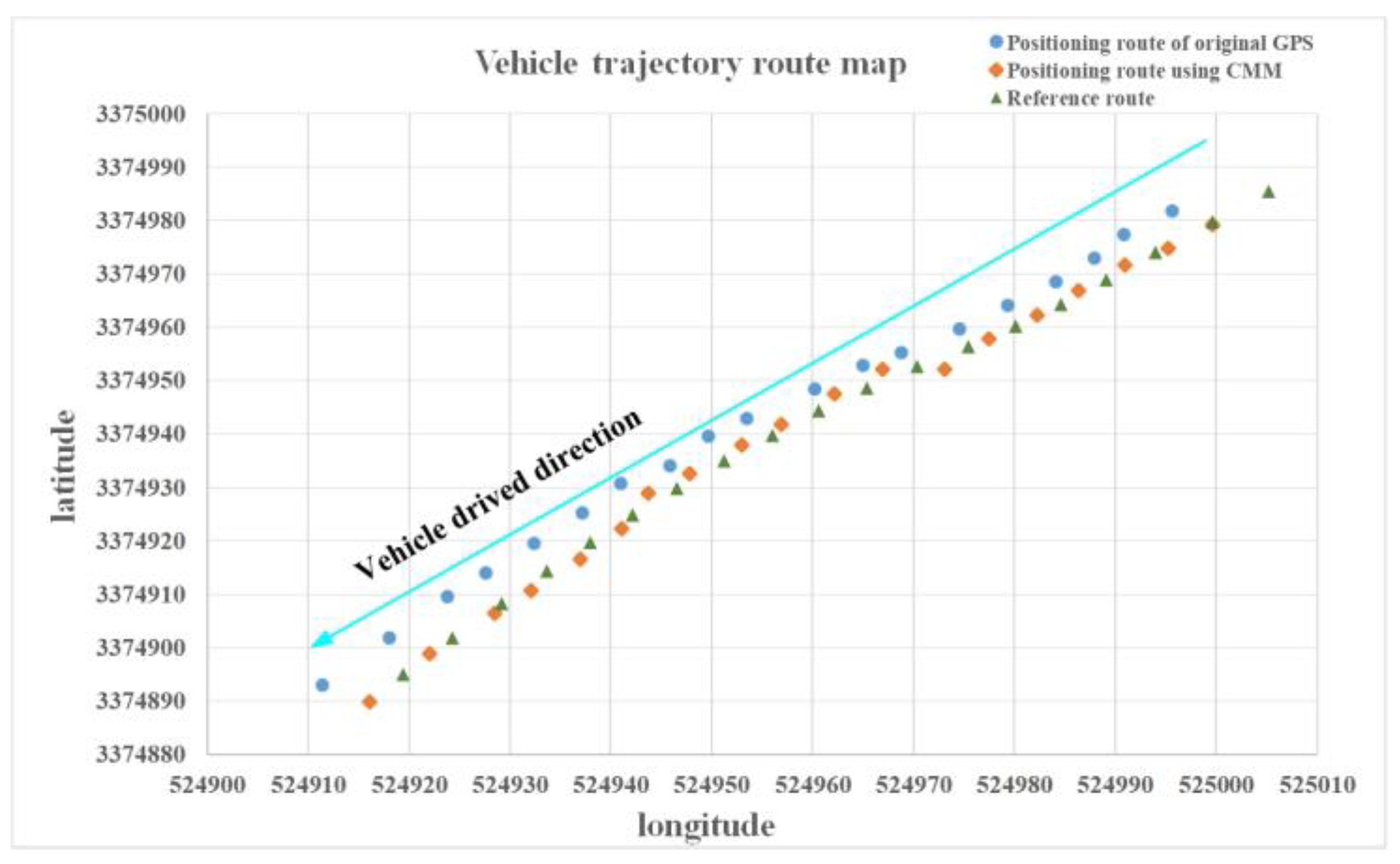
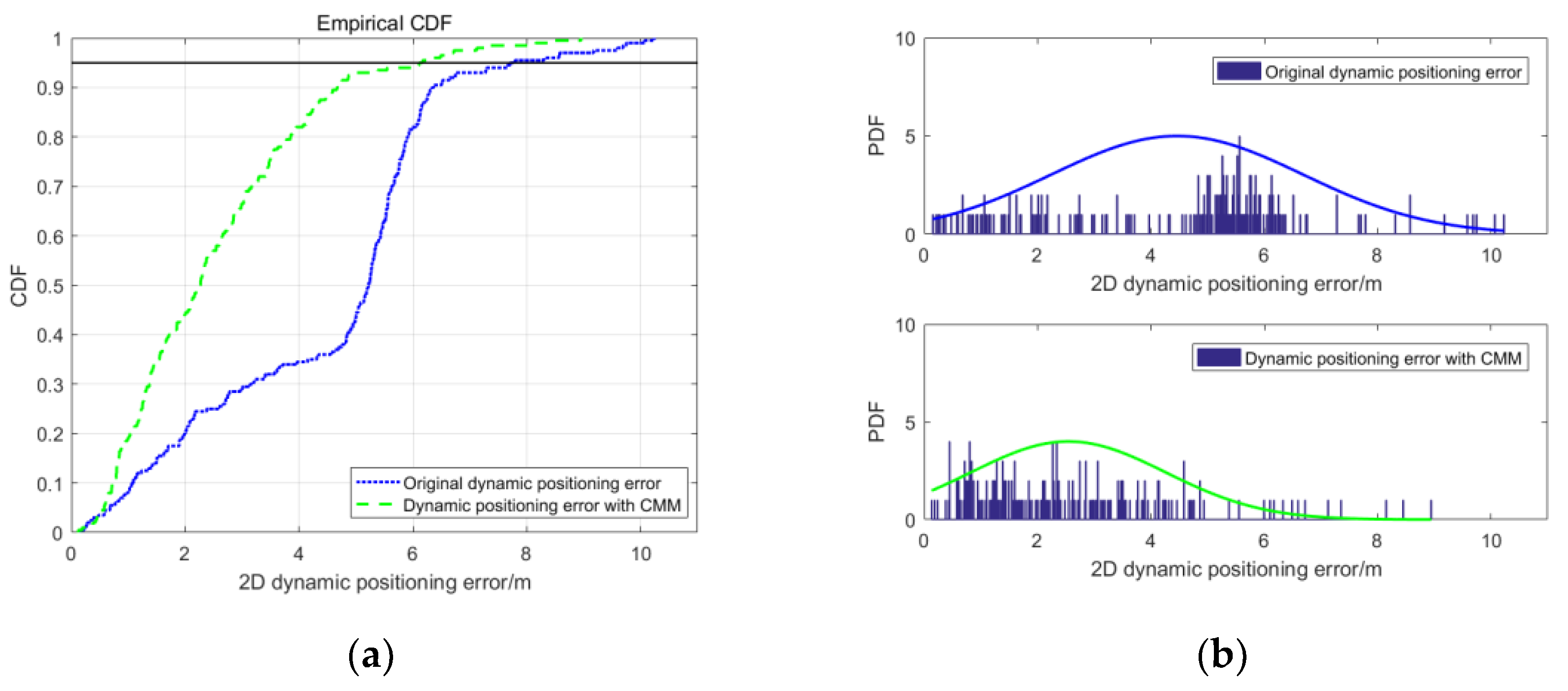
3.2.3. Dynamic Experiment
4. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, L.; Liu, X.H.; Xiao, W.; Tang, X. Analysis on the Influence of BeiDou Satellite Pseudorange Bias on Positioning. In Proceedings of the 2020 IEEE 3rd International Conference on Information Communication and Signal Processing (ICICSP), Shanghai, China, 12–15 September 2020; pp. 399–404. [Google Scholar]
- Sathish, N.B.; Krishna, N.K.; Odelu, O. Analysis of Multipath Mitigation Techniques in GNSS for Pseudorange Error Reduction. In Proceedings of the 2019 5th International Conference on Computing, Communication, Control and Automation (ICCUBEA), Pune, India, 19–21 September 2019; pp. 1–5. [Google Scholar]
- Luo, Y.; Weng, Z.; Qi, Y.; Deng, L.; Yu, W.; Li, F.; James, L.; Zhuang, W.; Miao, M.; Huang, J. Short-Baseline High-Precision DGPS for Smart Snow Blower. IEEE Internet Things 2020, 7, 5033–5041. [Google Scholar] [CrossRef]
- Li, J.; Gao, J.; Zhang, H.; Qiu, T.Z. RSE-Assisted Lane-Level Positioning Method for a Connected Vehicle Environment. IEEE T. Intell. Transp. 2019, 20, 2644–2656. [Google Scholar] [CrossRef]
- Wing, M.G.; Eklund, A.; Kellogg, L.D. Consumer-grade global positioning system (GPS) accuracy and reliability. J. For. 2005, 103, 169–173. [Google Scholar] [CrossRef]
- Jo, K.; Lee, M.; Sunwoo, M. Fast GPS-DR Sensor Fusion Framework: Removing the Geodetic Coordinate Conversion Process. IEEE T. Intell. Transp. 2016, 17, 2008–2013. [Google Scholar] [CrossRef]
- Henkel, P.; Sperl, A.; Mittmann, U.; Bensch, R.; Färber, P. Precise Positioning of Robots with Fusion of GNSS, INS, Odometry, LPS and Vision. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–6. [Google Scholar]
- Vu, A.; Ramanandan, A.; Chen, A.; Farrell, J.A.; Barth, M.J. Real-time computer vision/DGPS-aided inertial navigation system for lane-level vehicle navigation. IEEE T. Intell. Transp. 2012, 13, 899–913. [Google Scholar] [CrossRef]
- Lezki, H.; Yetik, İ.Ş. Localization Using Single Camera and Lidar in GPS-Denied Environments. In Proceedings of the 2020 28th Signal Processing and Communications Applications Conference (SIU), Gaziantep, Turkey, 5–7 October 2020; pp. 1–4. [Google Scholar]
- Ahmed, H.; Tahir, M. Accurate Attitude Estimation of a Moving Land Vehicle Using Low-Cost MEMS IMU Sensors. IEEE T. Intell. Transp. 2017, 18, 1723–1739. [Google Scholar] [CrossRef]
- Aono, T.; Fujii, K.; Hatsumoto, S.; Kamiya, T. Positioning of vehicle on undulating ground using GPS and dead reckoning. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation (Cat. No.98CH36146), Leuven, Belgium, 20 May 1998; pp. 3443–3448. [Google Scholar]
- Mayer, P.; Magno, M.; Berger, A.; Benini, L. RTK-LoRa: High-Precision, Long-Range, and Energy-Efficient Localization for Mobile IoT Devices. IEEE T. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Rovira-Garcia, A.; Juan, J.M.; Sanz, J.; González-Casado, G. A Worldwide Ionospheric Model for Fast Precise Point Positioning. IEEE T. Geosci. Remote 2015, 53, 4596–4604. [Google Scholar] [CrossRef] [Green Version]
- Barbarella, M.; Gandolfi, S.; Poluzzi, L.T.L. Precision of PPP as a Function of the Observing-Session Duration. IEEE T. Aero. Elec. Sys. 2018, 54, 2827–2836. [Google Scholar] [CrossRef]
- Elsheikh, M.; Noureldin, A.; Korenberg, M. Integration of GNSS Precise Point Positioning and Reduced Inertial Sensor System for Lane-Level Car Navigation. IEEE T. Intell. Transp. 2022, 23, 2246–2261. [Google Scholar] [CrossRef]
- Chen, L.; Ho, Y. Centimeter-Grade Metropolitan Positioning for Lane-Level Intelligent Transportation Systems Based on the Internet of Vehicles. IEEE T. Ind. Inform. 2019, 15, 1474–1485. [Google Scholar] [CrossRef]
- Song, Y.X.; Fu, Y.C.; Yu, F.R.; Zhou, L. Blockchain-Enabled Internet of Vehicles with Cooperative Positioning: A Deep Neural Network Approach. IEEE Internet Things 2020, 7, 3485–3498. [Google Scholar] [CrossRef]
- Ansari, K. Cooperative Position Prediction: Beyond Vehicle-to-Vehicle Relative Positioning. IEEE T. Intell. Transp. 2020, 21, 1121–1130. [Google Scholar] [CrossRef]
- Rabiee, R.; Zhong, X.H.; Yan, Y.S.; Tay, W.P. LaIF: A Lane-Level Self-Positioning Scheme for Vehicles in GNSS-Denied Environments. IEEE T. Intell. Transp. 2019, 20, 2944–2961. [Google Scholar] [CrossRef]
- Amini, A.; Vaghefi, R.M.; de la Garza, J.M.; Buehrer, R.M. Improving GPS-based vehicle positioning for Intelligent Transportation Systems. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; pp. 1023–1029.
- Mahmoud, A.; Noureldin, A.; Hassanein, H.S. Integrated Positioning for Connected Vehicles. IEEE T. Intell. Transp. 2020, 21, 397–409. [Google Scholar] [CrossRef]
- Feng, D.Q.; Wang, C.Q.; He, C.L.; Zhuang, Y.; Xia, X.G. Kalman-Filter-Based Integration of IMU and UWB for High-Accuracy Indoor Positioning and Navigation. IEEE Internet Things 2020, 7, 3133–3146. [Google Scholar] [CrossRef]
- Liu, K.; Lim, H.B.; Frazzoli, E.; Ji, H.; Lee, V.C.S. Improving Positioning Accuracy Using GPS Pseudorange Measurements for Cooperative Vehicular Localization. IEEE T. Veh. Technol. 2014, 63, 2544–2556. [Google Scholar] [CrossRef]
- Xu, C.; Wu, H.; Duan, S.H. Constrained Gaussian Condensation Filter for Cooperative Target Tracking. IEEE Internet Things 2022, 9, 1861–1874. [Google Scholar] [CrossRef]
- Liu, J.; Cai, B.G.; Wang, J. Cooperative Localization of Connected Vehicles: Integrating GNSS With DSRC Using a Robust Cubature Kalman Filter. IEEE T. Intell. Transp. 2017, 18, 2111–2125. [Google Scholar] [CrossRef]
- Kim, D.; Kim, B.; Chung, T.; Yi, K. Lane-Level Localization Using an AVM Camera for an Automated Driving Vehicle in Urban Environments. IEEE-Asme T. Mech. 2017, 22, 280–290. [Google Scholar] [CrossRef]
- Deng, L.Y.; Yang, M.; Hu, B.; Li, T.Y.; Li, H.; Wang, C.X. Semantic Segmentation-Based Lane-Level Localization Using Around View Monitoring System. IEEE Sens. J. 2019, 19, 10077–10086. [Google Scholar] [CrossRef]
- Zhang, Z.H.; Zhao, J.T.; Huang, C.Y.; Li, L. Learning Visual Semantic Map-Matching for Loosely Multi-sensor Fusion Localization of Autonomous Vehicles. IEEE T. Intell. Vehicl. (Early Access) 2022. [Google Scholar] [CrossRef]
- Cui, D.X.; Xue, J.R.; Zheng, N.N. Real-Time Global Localization of Robotic Cars in Lane Level via Lane Marking Detection and Shape Registration. IEEE T. Intell. Transp. 2016, 17, 1039–1050. [Google Scholar] [CrossRef]
- Rohani, M.; Gingras, D.; Gruyer, D. A Novel Approach for Improved Vehicular Positioning Using Cooperative Map Matching and Dynamic Base Station DGPS Concept. IEEE T. Intell. Transp. 2016, 17, 230–239. [Google Scholar] [CrossRef]
- Shen, M.C.; Sun, J.; Peng, H.; Zhao, D. Improving Localization Accuracy in Connected Vehicle Networks Using Rao–Blackwellized Particle Filters: Theory, Simulations, and Experiments. IEEE T. Intell. Transp. 2019, 20, 2255–2266. [Google Scholar] [CrossRef] [Green Version]
- Du, L.Y.; Ji, J.; Pei, Z.H.; Chen, W. A Novel Error Correction Approach to Improve Standard Point Positioning of Integrated BDS/GPS. Sensors 2020, 20, 6162. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Parameters |
|---|---|
| Positioning chip | S1216 |
| Serial port baud rate | 4800–230,400 bps |
| Positioning accuracy | 3 m (root mean square/RMS) |
| Letter of agreement | NMEA-0183 |
| Data update rate | 1/2/4/5/8/10/20 Hz |
| Cold start time | 30 s |
| Item | Parameters |
|---|---|
| RTK accuracy (RMS) | Horizontal: ± (10 + 1 × 10 − 6 × D) mm Vertical: ± (20 + 1 × 10 − 6 × D) mm |
| RTD accuracy (RMS) | Horizontal: ± 0.25 m (1 σ) Vertical: ±0.25 m (1 σ) |
| Single point positioning accuracy | Single frequency: H ≤ 3 m, V ≤ 5 m (1 σ, PDOP ≤ 4) Dual frequency: H ≤ 1.5 m, V ≤ 3 m (1 σ, PDOP ≤ 4) |
| First positioning time | Cold start < 50 s; Warm start < 45 s; Hot start < 15 s |
| RTK initialization time | <10 s |
| Signal reacquisition | <1.5 s (fast); <3.0 s (normal) |
| Initial confidence | >99.99% |
| Data update rate | 1/2/5/10/20/50 Hz |
| Operating temperature | −40 °C~+75 °C |
| Positioning Chip | Positioning Method | Positioning Accuracy (RMS) | Price | |
|---|---|---|---|---|
| Design system (ATK-1218-BD/GPS) | S1216 | Single point positioning | 3 m | RMB_108 |
| Sinan M100 | ASIC | RTK | decimeter-level ± (10 + 1 × 10 − 6×D) mm | RMB_7080 |
| MAE (m) | RMSE (m) | |||||
|---|---|---|---|---|---|---|
| East | North | 2D | East | North | 2D | |
| Original positioning | 0.089 | 2.033 | 2.048 | 0.064 | 0.099 | 0.101 |
| Positioning with CMM | 0.151 | 1.854 | 1.863 | 0.091 | 0.092 | 0.096 |
| MAE (m) | RMSE (m) | |||||
|---|---|---|---|---|---|---|
| East | North | 2D | East | North | 2D | |
| Original positioning | 3.76 | 1.64 | 4.46 | 2.36 | 1.10 | 2.22 |
| Positioning with CMM | 1.66 | 1.40 | 2.49 | 1.36 | 1.30 | 1.68 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, N.; Chen, W.; Li, C.; Du, L.; Zhang, D.; Zhang, M. An Application-Oriented Method Based on Cooperative Map Matching for Improving Vehicular Positioning Accuracy. Electronics 2022, 11, 3258. https://doi.org/10.3390/electronics11193258
Zhou N, Chen W, Li C, Du L, Zhang D, Zhang M. An Application-Oriented Method Based on Cooperative Map Matching for Improving Vehicular Positioning Accuracy. Electronics. 2022; 11(19):3258. https://doi.org/10.3390/electronics11193258
Chicago/Turabian StyleZhou, Nanhao, Wei Chen, Changzhen Li, Luyao Du, Donghua Zhang, and Ming Zhang. 2022. "An Application-Oriented Method Based on Cooperative Map Matching for Improving Vehicular Positioning Accuracy" Electronics 11, no. 19: 3258. https://doi.org/10.3390/electronics11193258
APA StyleZhou, N., Chen, W., Li, C., Du, L., Zhang, D., & Zhang, M. (2022). An Application-Oriented Method Based on Cooperative Map Matching for Improving Vehicular Positioning Accuracy. Electronics, 11(19), 3258. https://doi.org/10.3390/electronics11193258