
An Autonomous Vehicle Stability Control Using Active Fault-Tolerant Control Based on a Fuzzy Neural Network


Abstract
1. Introduction
2. Literature Review
- Interaction of the model-conditional estimates.
- Model-conditional filtering.
- Mode probability update.
- Estimates combination.
3. Research Methodology
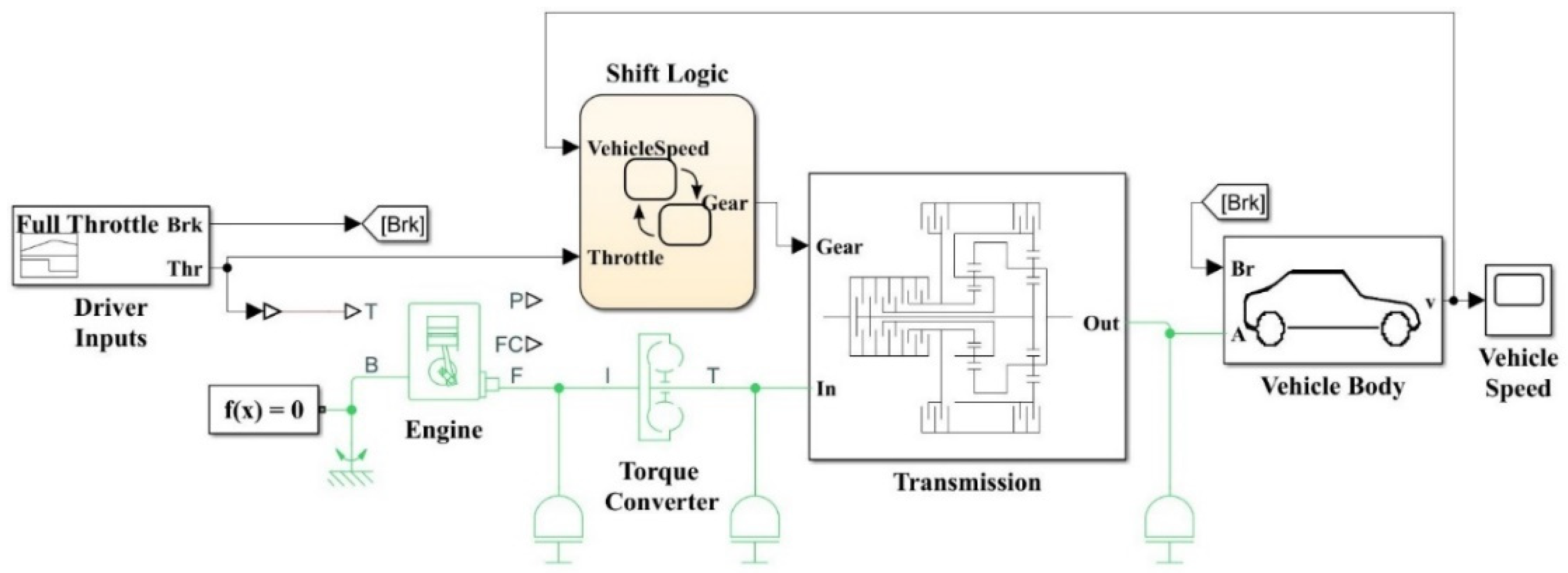
3.1. Mathematical Modeling of Autonomous Vehicle
3.1.1. Tire Model
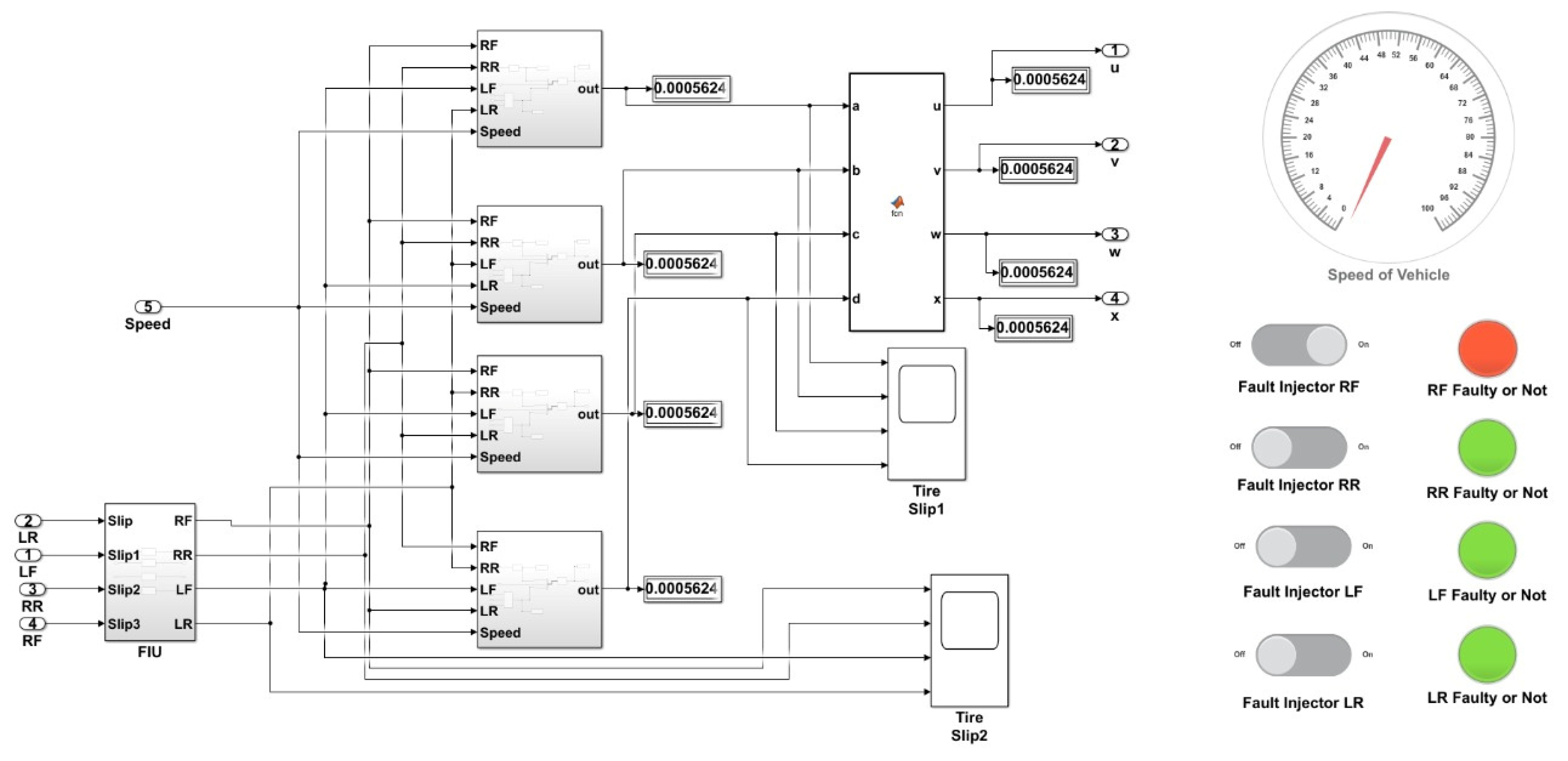
3.1.2. Modelling for Tire Slip
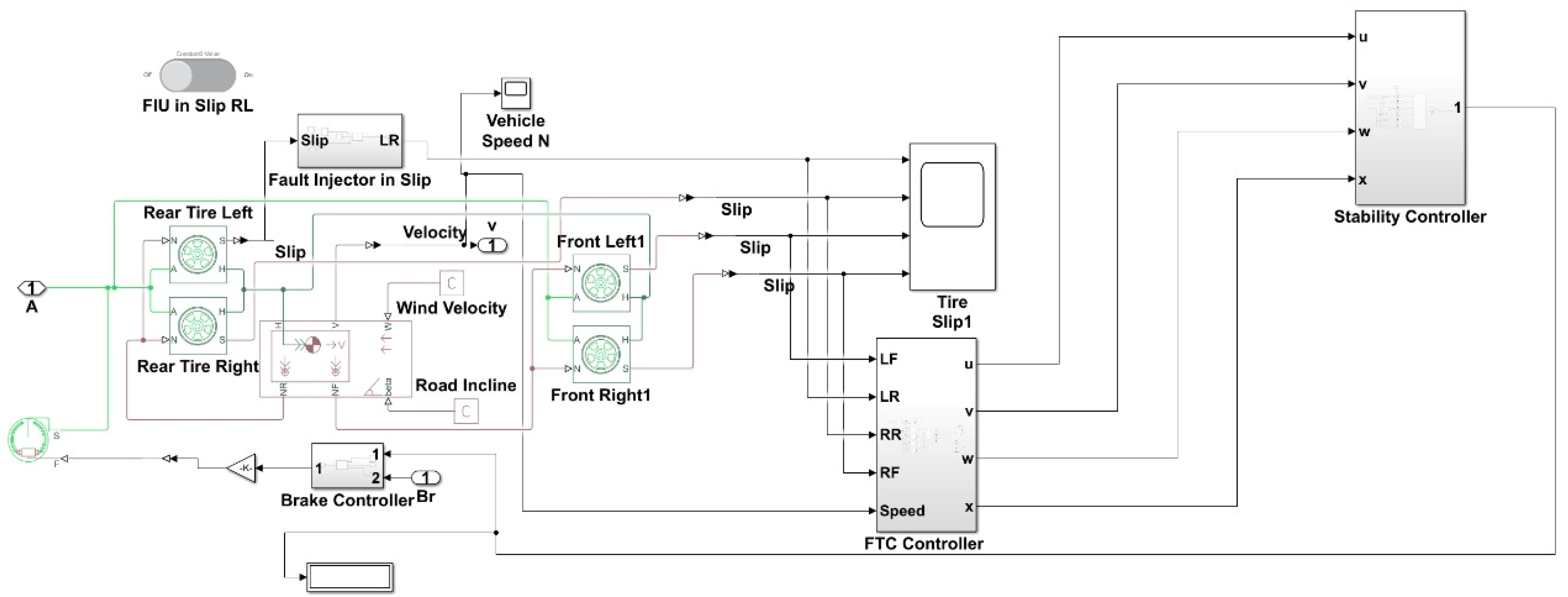
3.1.3. Modelling for Fault-Tolerant Controller
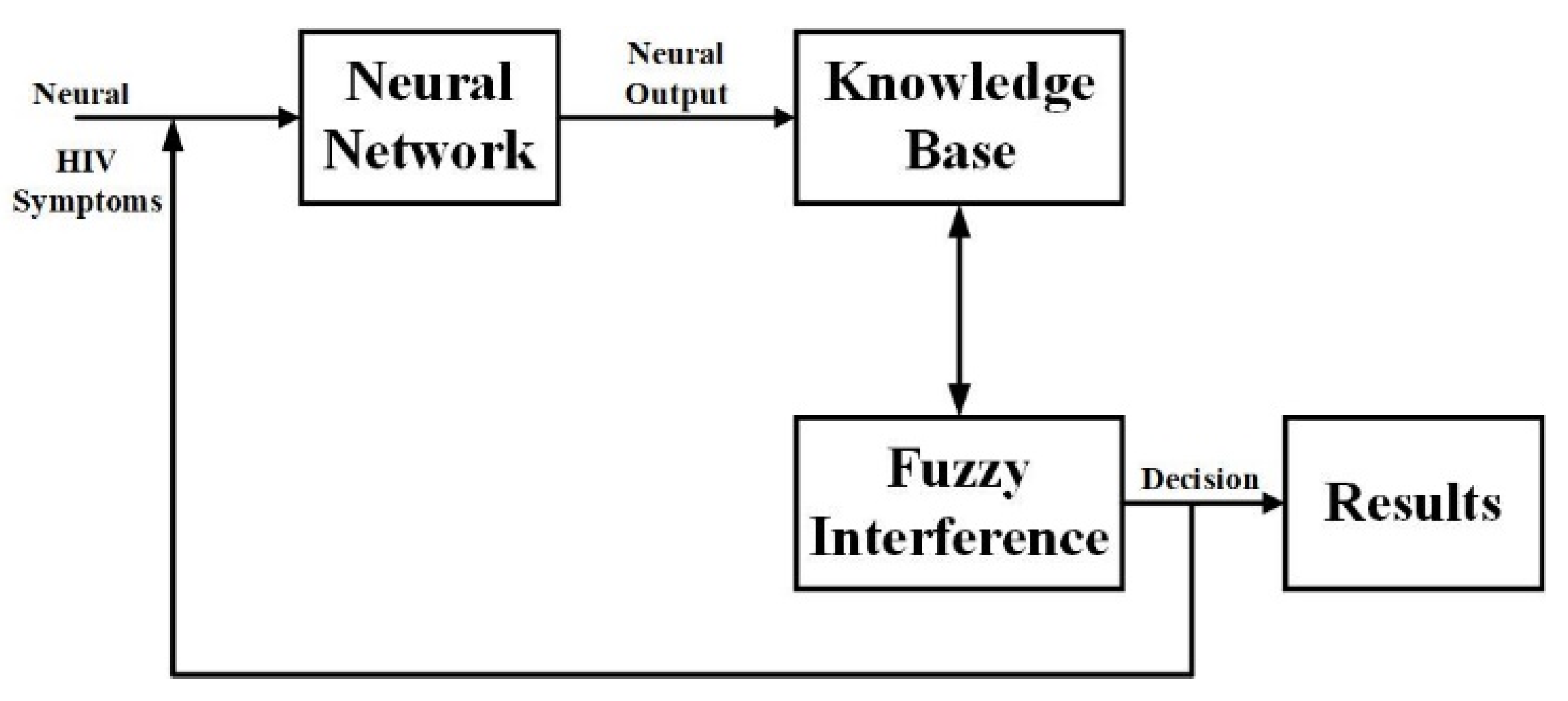
3.1.4. Fuzzy Neural Network Algorithm
3.1.5. Fuzzy Logic Controller
4. Results and Discussions
5. Comparison with Existing Work
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Abbreviation | Description |
| FTC | Fault-Tolerant Control |
| AFTC | Active Fault-Tolerant Control |
| PFTC | Passive Fault-Tolerant Control |
| 4WID | Four Wheel Independently Driven |
| SMC | Sliding Mode Control |
| LPV | Linear Parameter Varying |
| CA | Control Allocation |
| MPC | Model Predictive Control |
| SELM | Sequential Extreme Learning Machine |
| FTS | Fault-Tolerance Based Supervisor |
| FDI | Fault Detection and Isolation |
| CS | Control Switching |
| IMM | Integration Multiple Model |
References
- Wang, Y.; Ding, H.; Yuan, J.; Chen, H. Output-feedback triple-step coordinated control for path following of autonomous ground vehicles. Mech. Syst. Signal Process. 2019, 116, 146–159. [Google Scholar] [CrossRef]
- Wang, Y.; Gao, J.; Li, K.; Chen, H. Integrated design of control allocation and triple-step control for over-actuated electric ground vehicles with actuator faults. J. Frankl. Inst. 2020, 357, 3150–3167. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, H.; Huang, X.; Wang, J.; Yu, H.; Graaf, R. Active Fault-Tolerant Control for Electric Vehicles With Independently Driven Rear In-Wheel Motors Against Certain Actuator Faults. IEEE Trans. Control Syst. Technol. 2015, 24, 1557–1572. [Google Scholar] [CrossRef]
- Saleh, L.; Chevrel, P.; Claveau, F.; Lafay, J.-F.; Mars, F. Shared Steering Control Between a Driver and an Automation: Stability in the Presence of Driver Behavior Uncertainty. IEEE Trans. Intell. Transp. Syst. 2013, 14, 974–983. [Google Scholar] [CrossRef]
- Amin, A.A.; Hasan, K.M. A review of Fault Tolerant Control Systems: Advancements and applications. Measurement 2019, 143, 58–68. [Google Scholar] [CrossRef]
- Wang, B.; Huang, X.; Wang, J.; Guo, X.; Zhu, X. A robust wheel slip ratio control design combining hydraulic and regenerative braking systems for in-wheel-motors-driven electric Vehicles. J. Frankl. Inst. 2014, 352, 577–602. [Google Scholar] [CrossRef]
- Zhang, H.; Zhao, W.; Wang, J. Fault-Tolerant Control for Electric Vehicles With Independently Driven in-Wheel Motors Considering Individual Driver Steering Characteristics. IEEE Trans. Veh. Technol. 2019, 68, 4527–4536. [Google Scholar] [CrossRef]
- Smith, E.N.; Velenis, E.; Tavernini, D.; Cao, D. Effect of handling characteristics on minimum time cornering with torque vectoring. Veh. Syst. Dyn. 2017, 56, 221–248. [Google Scholar] [CrossRef]
- Aouaouda, S.; Chadli, M.; Boukhnifer, M.; Karimi, H.R. Robust fault tolerant tracking controller design for vehicle dynamics: A descriptor approach. Mechatronics 2015, 30, 316–326. [Google Scholar] [CrossRef]
- Alsuwian, T.; Amin, A.A.; Maqsood, M.T.; Qadir, M.B.; Almasabi, S.; Jalalah, M. Advanced Fault-Tolerant Anti-Surge Control System of Centrifugal Compressors for Sensor and Actuator Faults. Sensors 2022, 22, 3864. [Google Scholar] [CrossRef]
- Luo, Y.; Hu, Y.; Jiang, F.; Chen, R.; Wang, Y. Active Fault-Tolerant Control Based on Multiple Input Multiple Output-Model Free Adaptive Control for Four Wheel Independently Driven Electric Vehicle Drive System. Appl. Sci. 2019, 9, 276. [Google Scholar] [CrossRef]
- Aravindh, D.; Sakthivel, R.; Kaviarasan, B.; Anthoni, S.M.; Alzahrani, F. Design of observer-based non-fragile load frequency control for power systems with electric vehicles. ISA Trans. 2019, 91, 21–31. [Google Scholar] [CrossRef] [PubMed]
- Amin, A.A.; Mahmood-Ul-Hasan, K. Advanced Fault Tolerant Air-Fuel Ratio Control of Internal Combustion Gas Engine for Sensor and Actuator Faults. IEEE Access 2019, 7, 17634–17643. [Google Scholar] [CrossRef]
- Shen, H.; Xing, M.; Wu, Z.-G.; Xu, S.; Cao, J. Multiobjective Fault-Tolerant Control for Fuzzy Switched Systems With Persistent Dwell Time and Its Application in Electric Circuits. IEEE Trans. Fuzzy Syst. 2019, 28, 2335–2347. [Google Scholar] [CrossRef]
- Sakthivel, R.; Mohanapriya, S.; Kaviarasan, B.; Ren, Y.; Anthoni, S.M. Non-fragile control design and state estimation for vehicle dynamics subject to input delay and actuator faults. IET Control Theory Appl. 2020, 14, 134–144. [Google Scholar] [CrossRef]
- Wang, Y.; Zong, C.; Li, K.; Chen, H. Fault-tolerant control for in-wheel-motor-driven electric ground vehicles in discrete time. Mech. Syst. Signal Process. 2019, 121, 441–454. [Google Scholar] [CrossRef]
- Amin, A.A.; Mahmood-ul-Hasan, K. Robust passive fault tolerant control for air fuel ratio control of internal combustion gasoline engine for sensor and actuator faults. IETE J. Res. 2021, 1–16. [Google Scholar] [CrossRef]
- Tamaddoni, S.H.; Taheri, S.; Ahmadian, M. Cooperative DYC system design for optimal vehicle handling enhancement. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 1495–1500. [Google Scholar]
- Amin, A.A.; Mahmood-Ul-Hasan, K. Hybrid fault tolerant control for air–fuel ratio control of internal combustion gasoline engine using Kalman filters with advanced redundancy. Meas. Control 2019, 52, 473–492. [Google Scholar] [CrossRef]
- Shen, H.; Dai, M.; Luo, Y.; Cao, J.; Chadli, M. Fault-Tolerant Fuzzy Control for Semi-Markov Jump Nonlinear Systems Subject to Incomplete SMK and Actuator Failures. IEEE Trans. Fuzzy Syst. 2020, 29, 3043–3053. [Google Scholar] [CrossRef]
- Maestre, J.M.; de la Peña, D.M.; Camacho, E.F. Distributed model predictive control based on a cooperative game. Optim. Control Appl. Methods 2010, 32, 153–176. [Google Scholar] [CrossRef]
- Complete Vehicle Model—MATLAB & Simulink—MathWorks India. Available online: https://in.mathworks.com/help/sdl/ug/about-the-complete-vehicle-model.html (accessed on 22 February 2022).
- Nguyen, B.H.; Nguyen, D.; Thanh, V.D.; Minh, C.T. An EMR of Tire-Road Interaction Based-On “Magic Formula” for Modeling of Electric Vehicles. In Proceedings of the 2015 IEEE Vehicle Power and Propulsion Conference, Montreal, QC, Canada, 19–22 October 2015; pp. 1–5. [Google Scholar]
- Tire-Road Dynamics Given by Magic Formula Coefficients—MATLAB—MathWorks India. Available online: https://in.mathworks.com/help/sdl/ref/tireroadinteractionmagicformula.html (accessed on 22 February 2022).
- Zhang, B.; Lu, S. Fault-tolerant control for four-wheel independent actuated electric vehicle using feedback linearization and cooperative game theory. Control Eng. Pract. 2020, 101, 104510. [Google Scholar] [CrossRef]
- Riaz, U.; Amin, A.A.; Tayyeb, M. Design of active fault-tolerant control system for Air-fuel ratio control of internal combustion engines using fuzzy logic controller. Sci. Prog. 2022, 105, 00368504221094723. [Google Scholar] [CrossRef]
- Na, X.; Cole, D.J. Game-Theoretic Modeling of the Steering Interaction Between a Human Driver and a Vehicle Collision Avoidance Controller. IEEE Trans. Hum.-Mach. Syst. 2014, 45, 25–38. [Google Scholar] [CrossRef]
- Espitia, H.; Machón, I.; López, H. Design and Optimization of a Neuro-Fuzzy System for the Control of an Electromechanical Plant. Appl. Sci. 2022, 12, 541. [Google Scholar] [CrossRef]
- Alsuwian, T.; Riaz, U.; Amin, A.A.; Qadir, M.B.; Almasabi, S.; Jalalah, M. Hybrid Fault-Tolerant Control for Air-Fuel Ratio Control System of Internal Combustion Engine Using Fuzzy Logic and Super-Twisting Sliding Mode Control Techniques. Energies 2022, 15, 7010. [Google Scholar] [CrossRef]
- Train Adaptive Neuro-Fuzzy Inference Systems—MATLAB & Simulink—MathWorks India. Available online: https://in.mathworks.com/help/fuzzy/train-adaptive-neuro-fuzzy-inference-systems-gui.html (accessed on 22 February 2022).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description and Unit |
|---|---|
| Wheel Radius | |
| Wheel hub longitudinal velocity | |
| Tire longitudinal deformation | |
| Ω | Wheel angular velocity |
| Contact point angular velocity. If there is no tire longitudinal deformation, that is = 0, = Ω | |
| Tire thread longitudinal Velocity | |
| Wheel slip velocity | |
| Contact slip velocity. If there is no tire longitudinal deformation, that is = 0, | |
| Wheel slip | |
| Contact slip. If there is no tire longitudinal deformation, that is = 0, | |
| Wheel hub threshold velocity | |
| Vertical load on the tire | |
| The longitudinal force exerted on the tire at the contact point | |
| Tire longitudinal stiffness under deformation | |
| Tire longitudinal damping under deformation | |
| Wheel-tire inertia, such that the effective mass is equal to | |
| Torque applied by the axle to the wheel |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alsuwian, T.; Usman, M.H.; Amin, A.A. An Autonomous Vehicle Stability Control Using Active Fault-Tolerant Control Based on a Fuzzy Neural Network. Electronics 2022, 11, 3165. https://doi.org/10.3390/electronics11193165
Alsuwian T, Usman MH, Amin AA. An Autonomous Vehicle Stability Control Using Active Fault-Tolerant Control Based on a Fuzzy Neural Network. Electronics. 2022; 11(19):3165. https://doi.org/10.3390/electronics11193165
Chicago/Turabian StyleAlsuwian, Turki, Mian Hamza Usman, and Arslan Ahmed Amin. 2022. "An Autonomous Vehicle Stability Control Using Active Fault-Tolerant Control Based on a Fuzzy Neural Network" Electronics 11, no. 19: 3165. https://doi.org/10.3390/electronics11193165
APA StyleAlsuwian, T., Usman, M. H., & Amin, A. A. (2022). An Autonomous Vehicle Stability Control Using Active Fault-Tolerant Control Based on a Fuzzy Neural Network. Electronics, 11(19), 3165. https://doi.org/10.3390/electronics11193165