
Research on Adaptive Exponential Droop Control Strategy for VSC-MTDC System



Abstract
:1. Introduction
2. Adaptive Exponential Droop Control
2.1. Traditional Droop Control
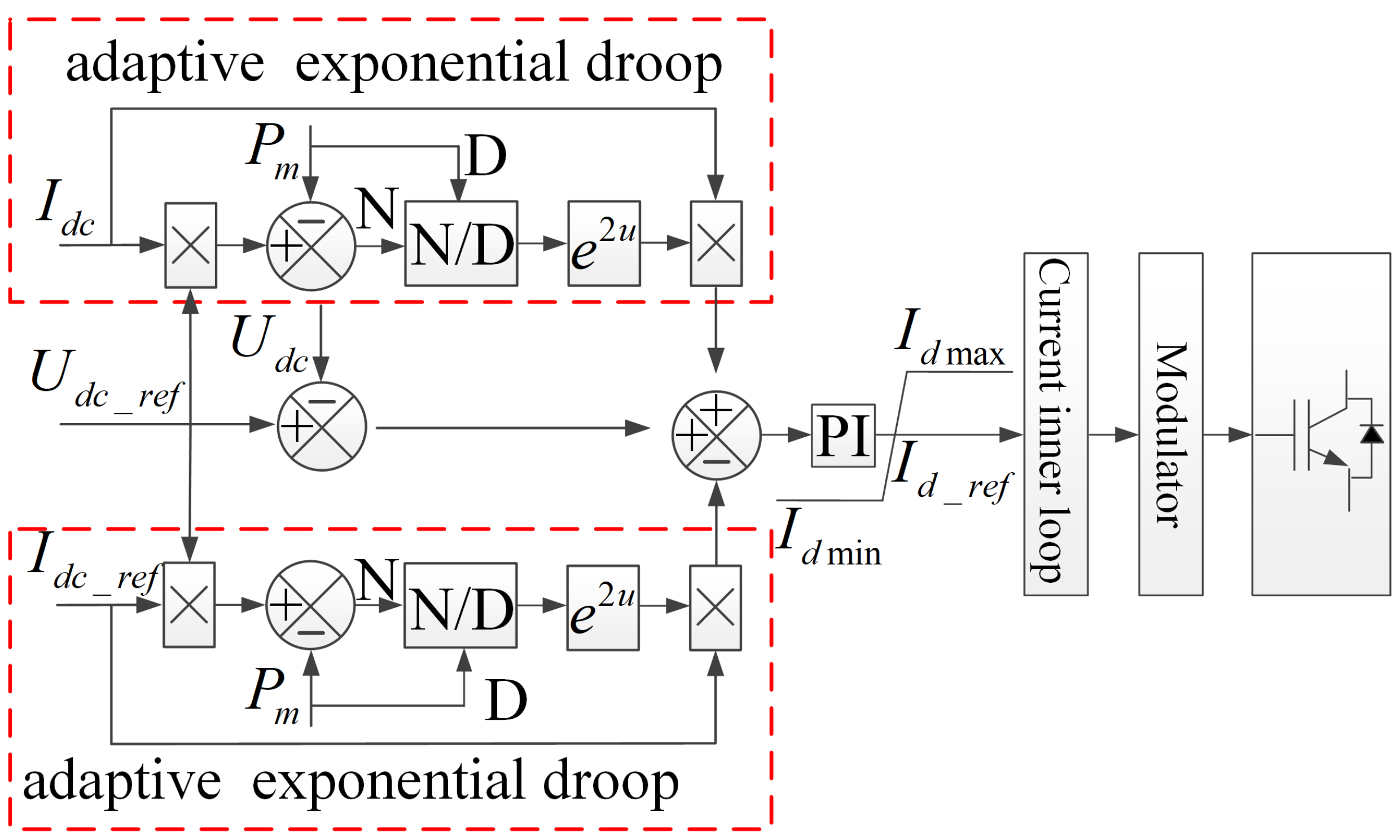
2.2. Adaptive Exponential Droop Control
2.3. Dc Voltage Deviation Analysis
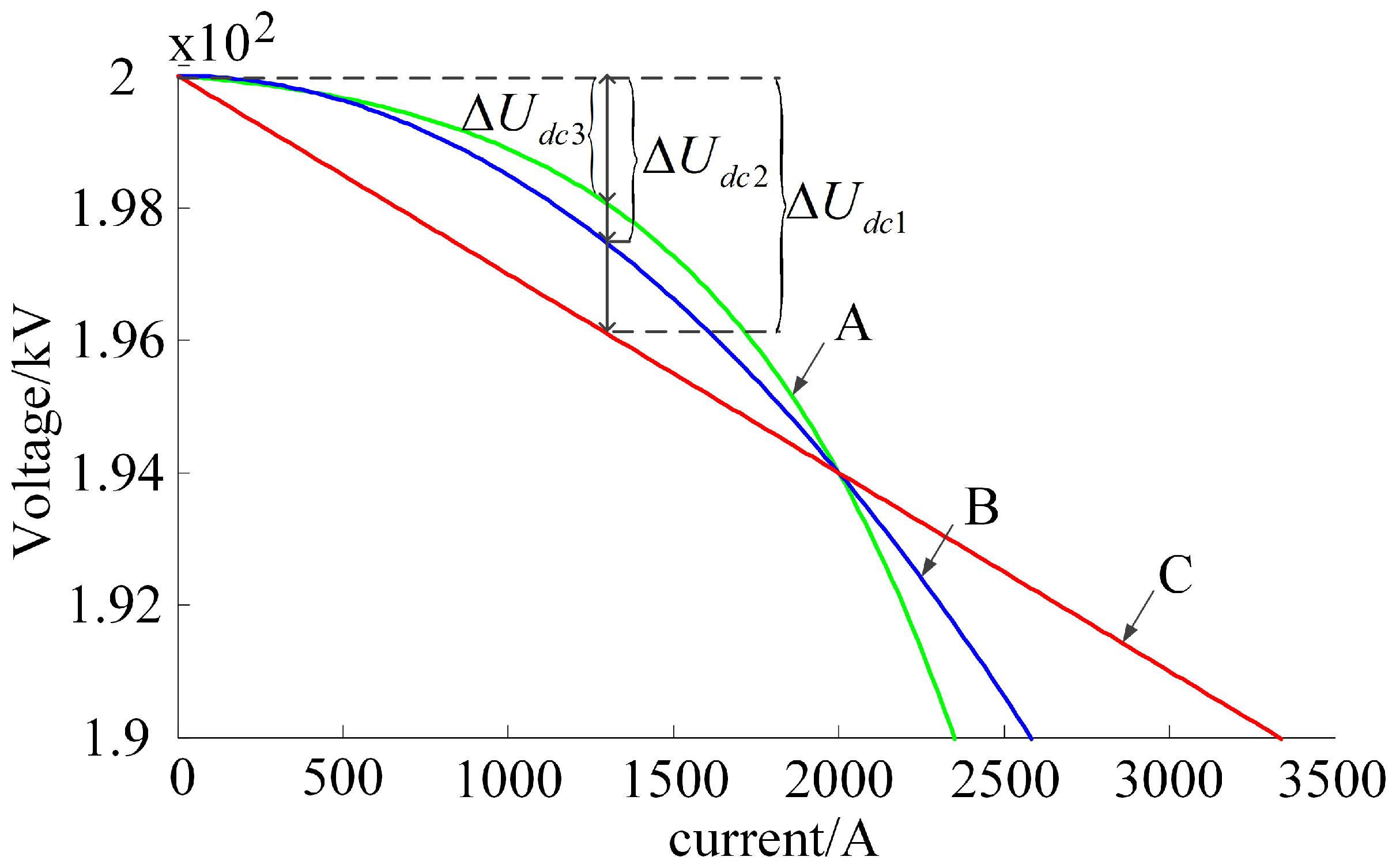
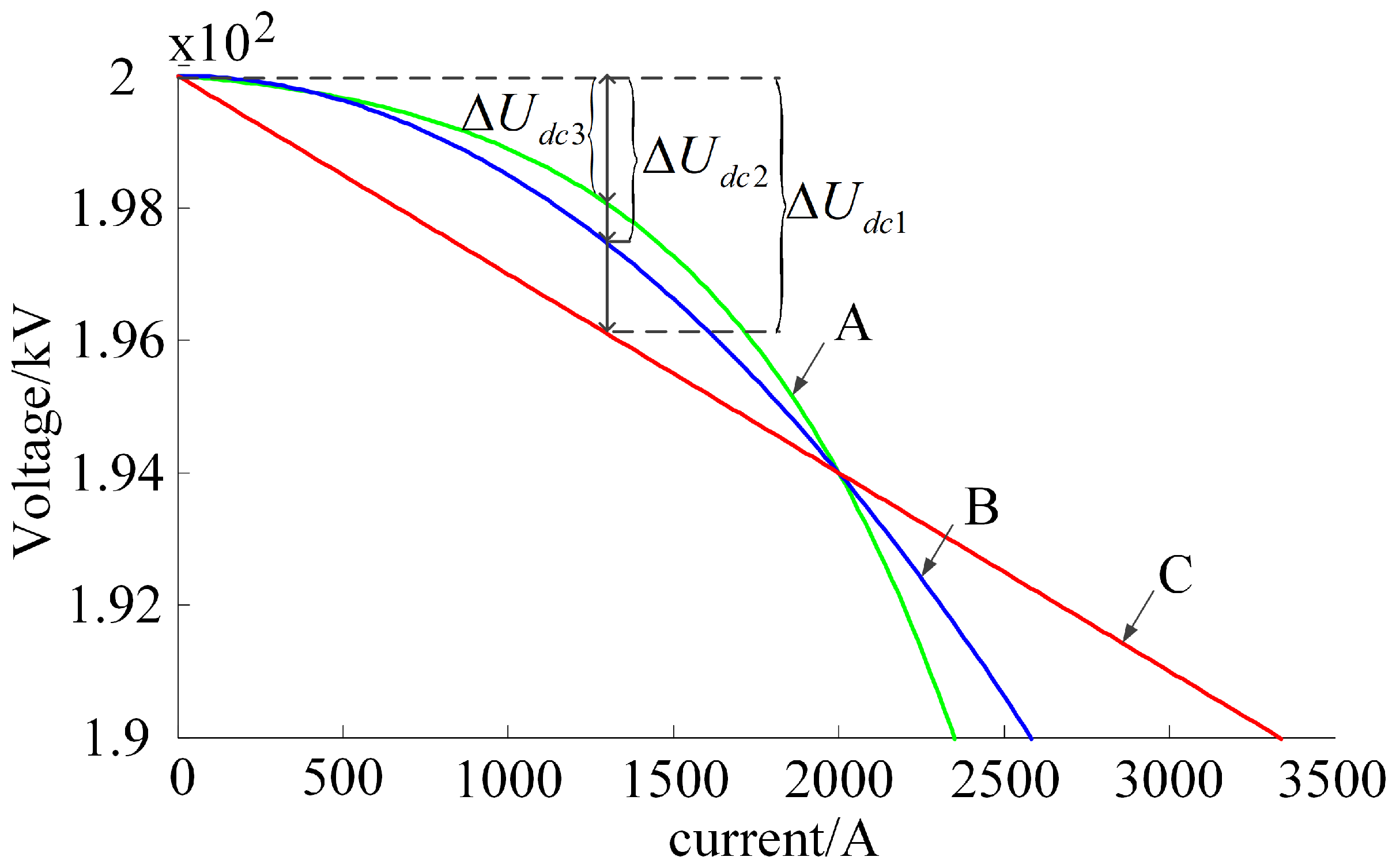
- If we compare the voltage deviation between the adaptive exponential droop control and the traditional droop control by mathematical difference, the difference result is as follows:Since this is within the range of the converter current variation, that is, , there is always , and so the above formula always has . Thus, the DC voltage deviation is always better for the adaptive exponential droop control than the traditional droop control.
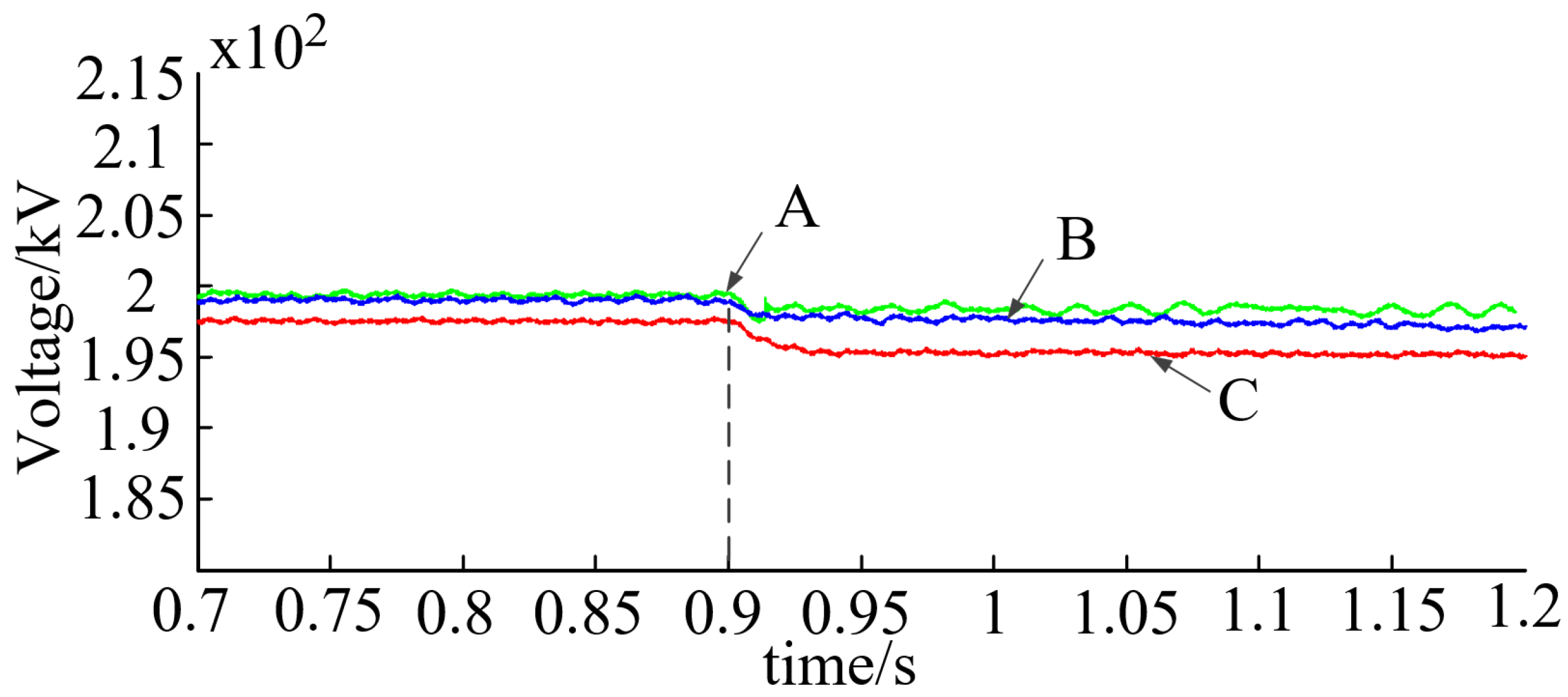
- As shown in Figure 2, adaptive exponential droop control (A), adaptive droop control (B) [26], and the traditional droop control (C) are compared through a curve diagram, and it is easy to see that the deviation of DC voltage is slighty better for the adaptive droop control than the adaptive exponential droop control in a small range; however, the voltage deviation of the exponential droop control is better than that of the adaptive droop control in a large variation range.
2.4. Analysis of Power Distribution Characteristics
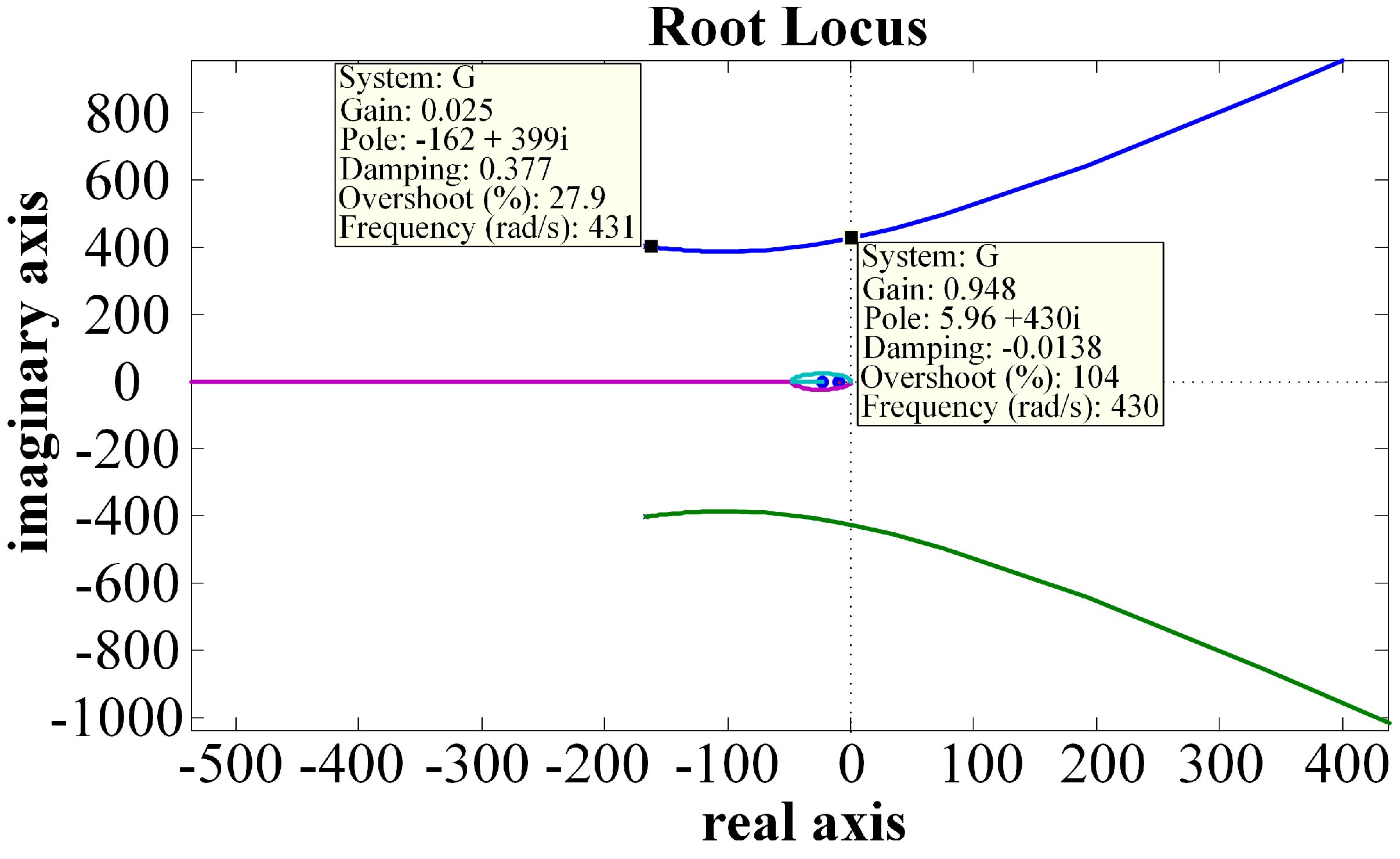
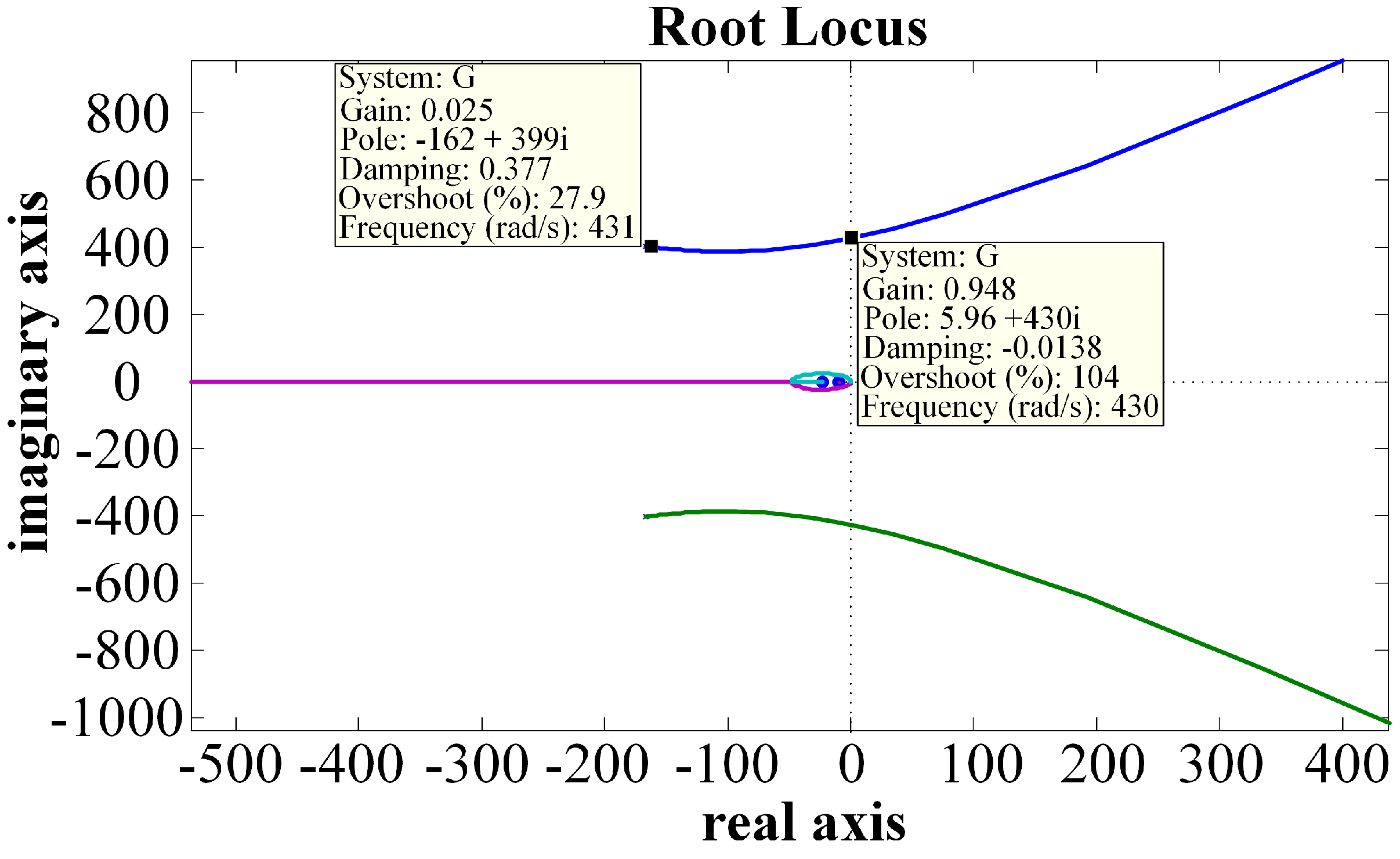
3. Influence of Adaptive Exponential Sag Coefficient on Stability
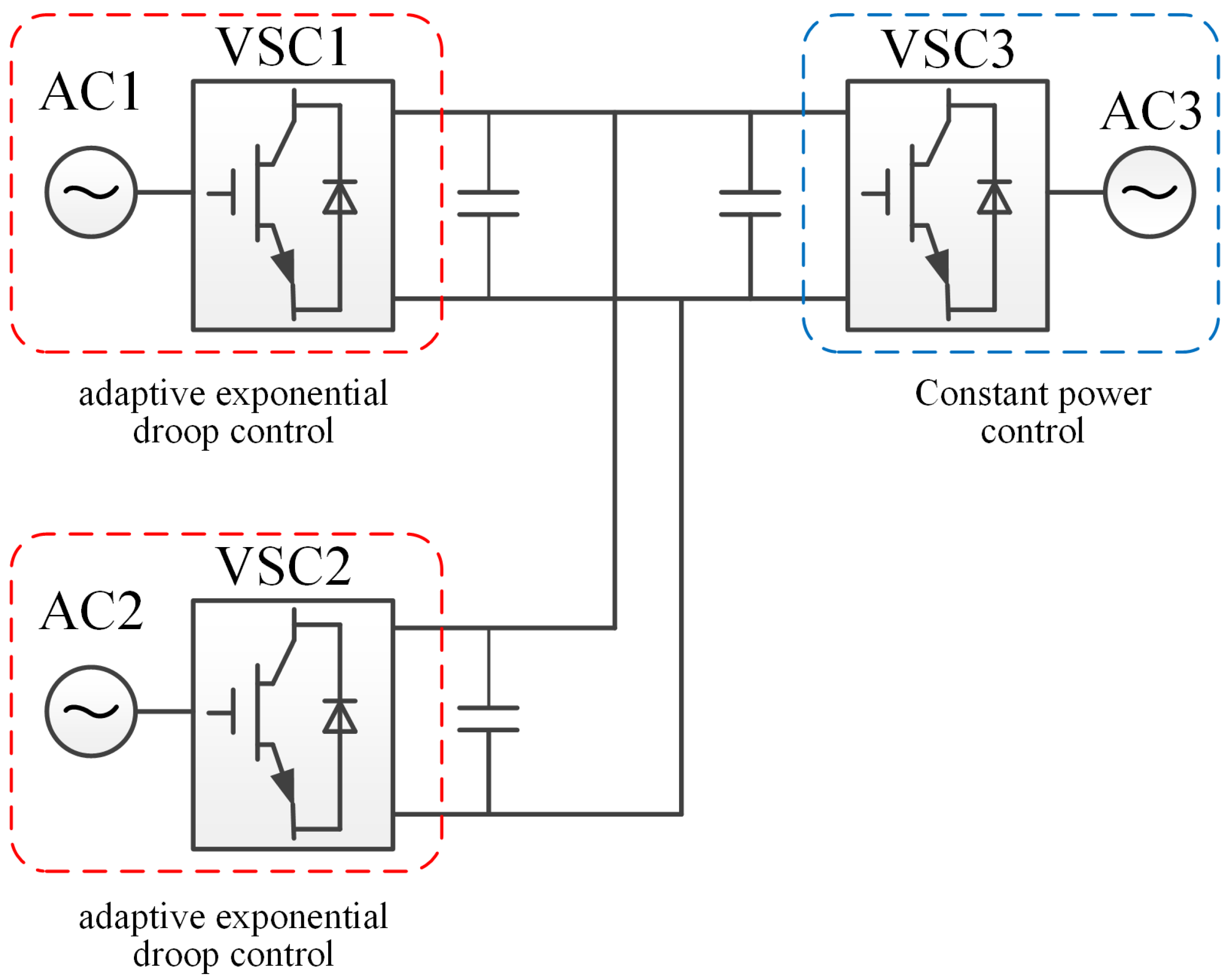
4. Simulation
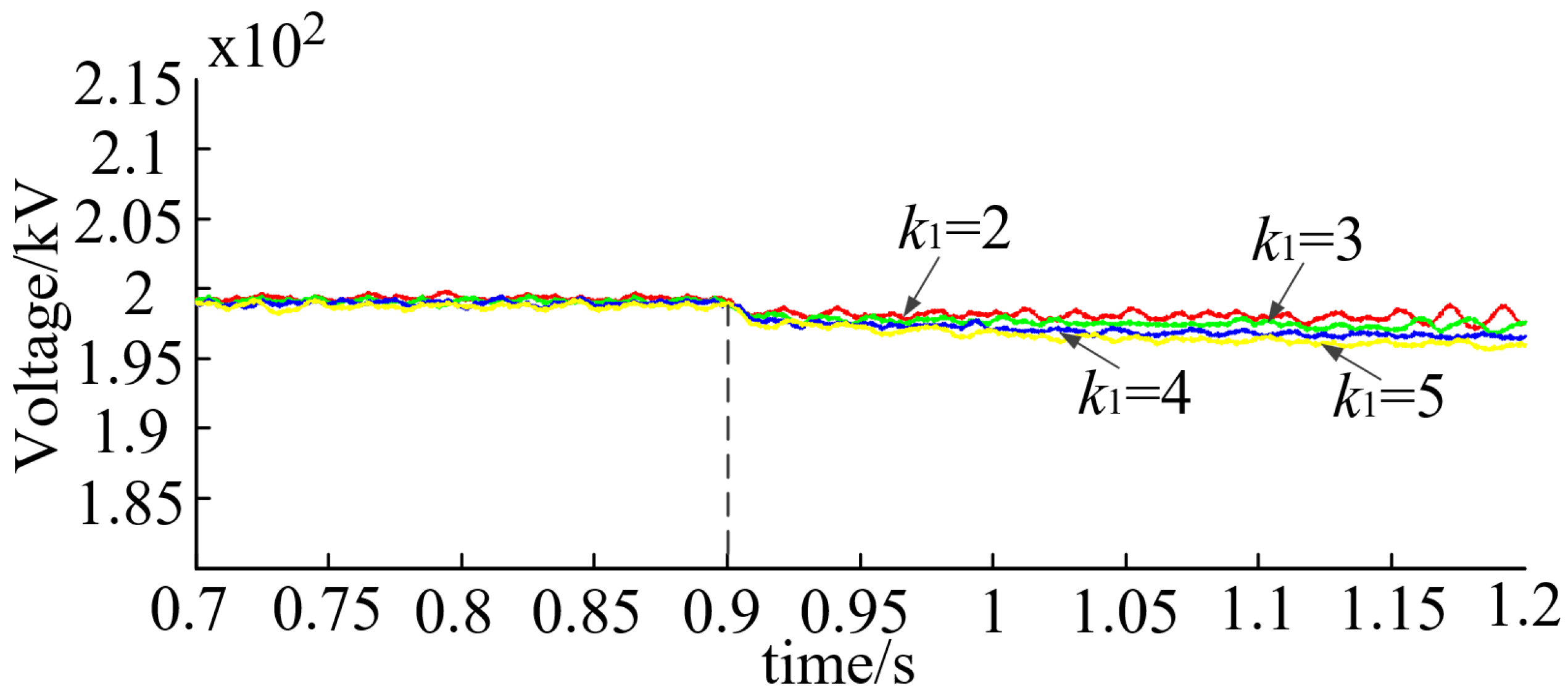
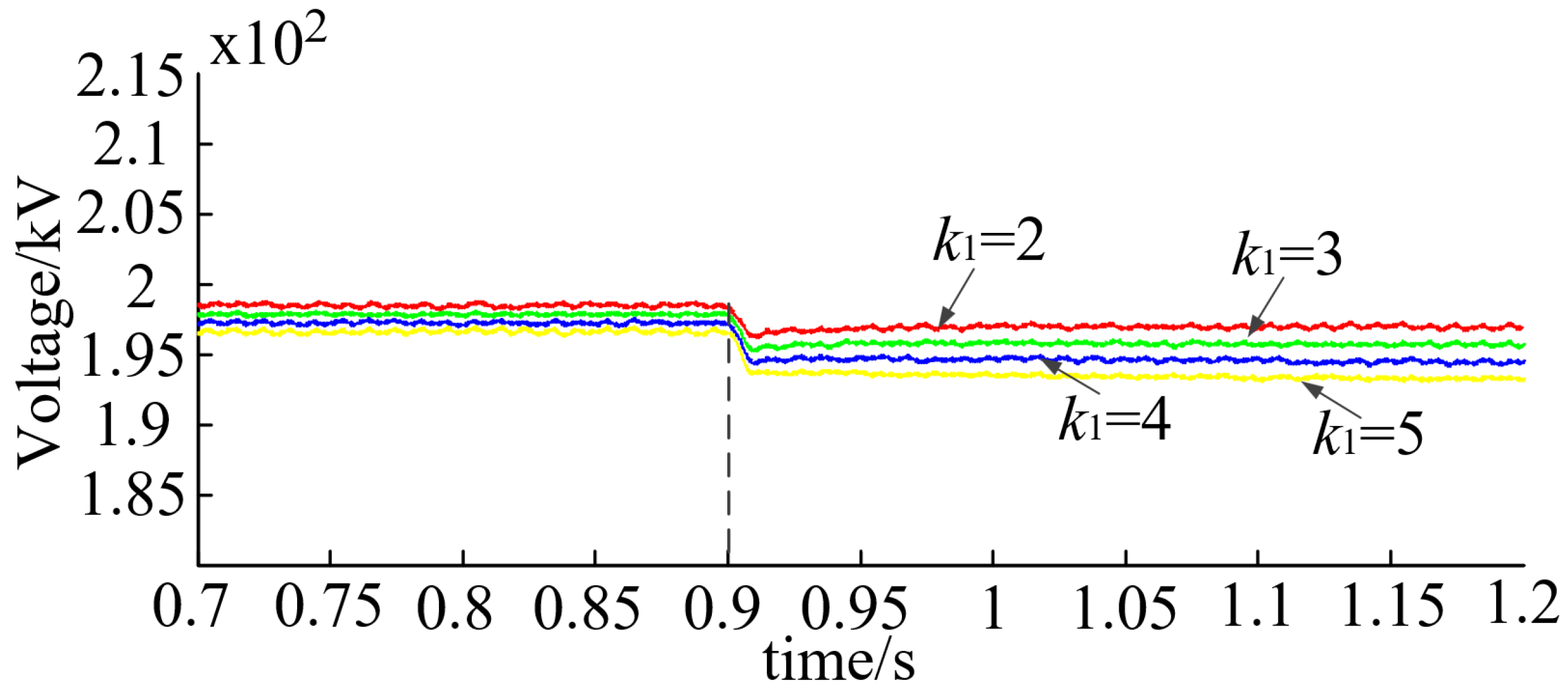
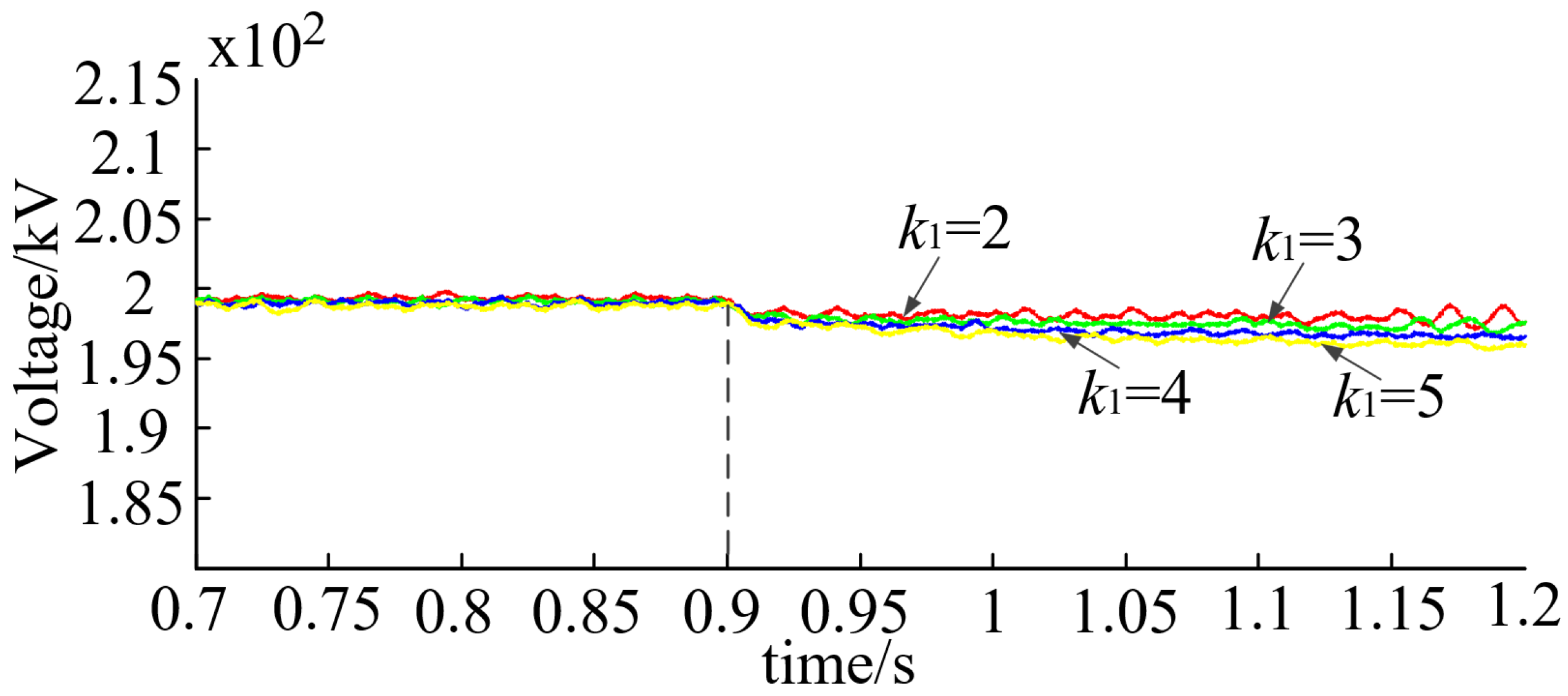
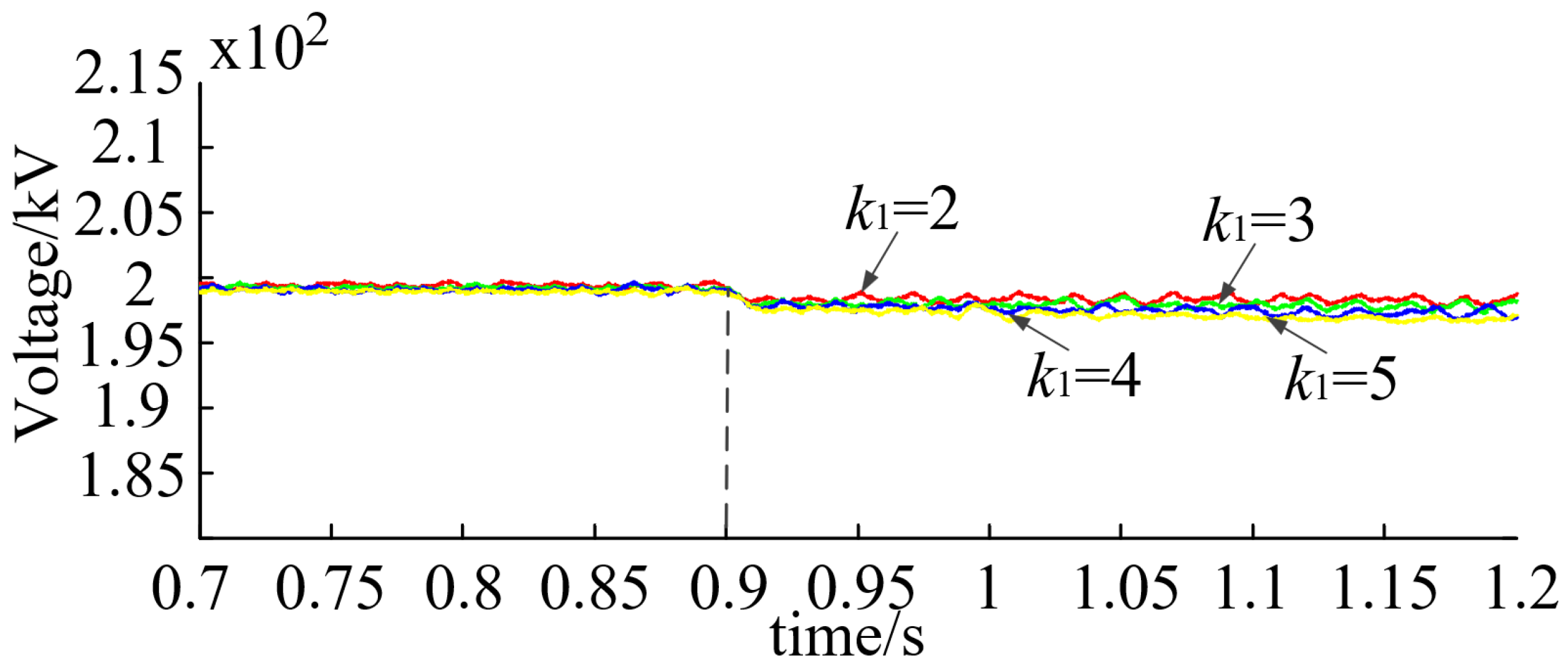
4.1. Simulation Results of Different Droop Coefficients
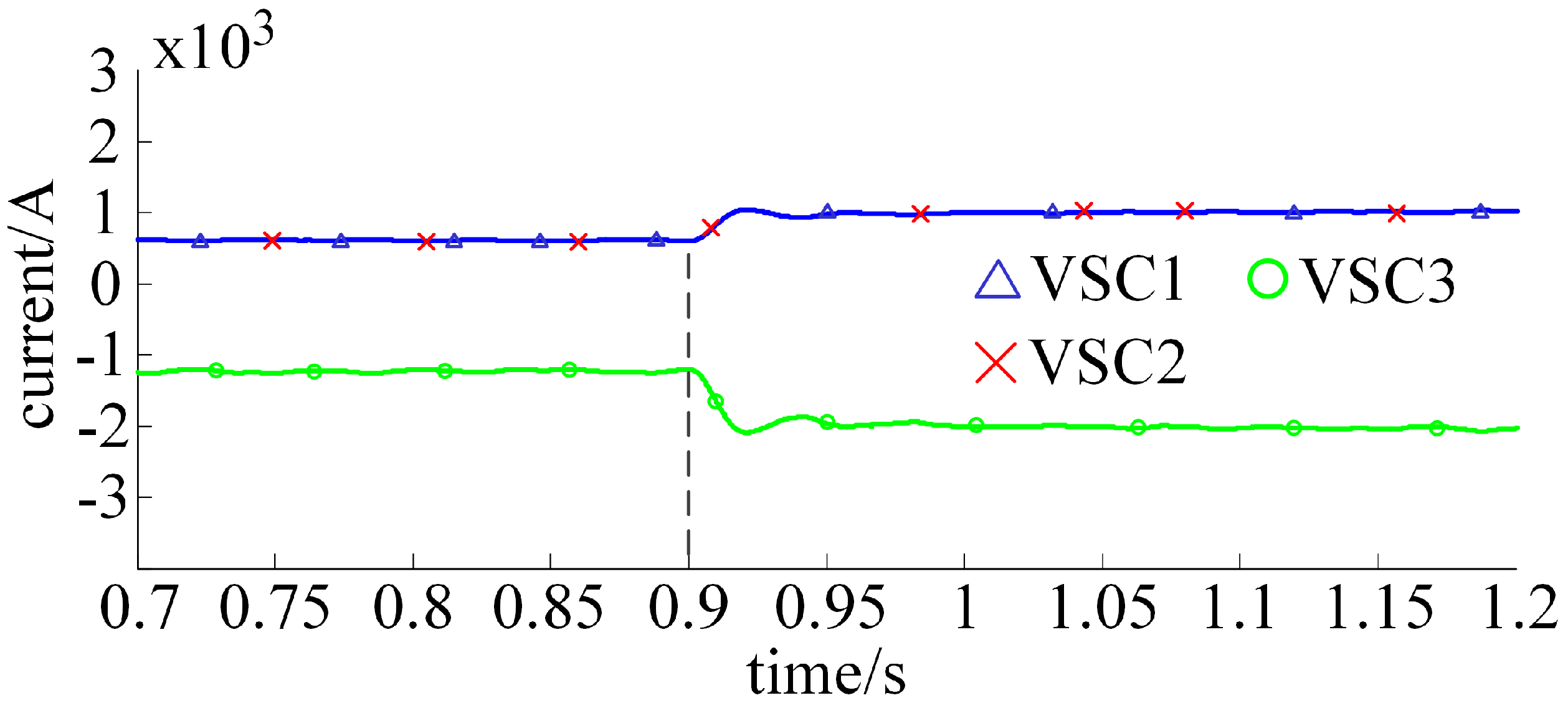
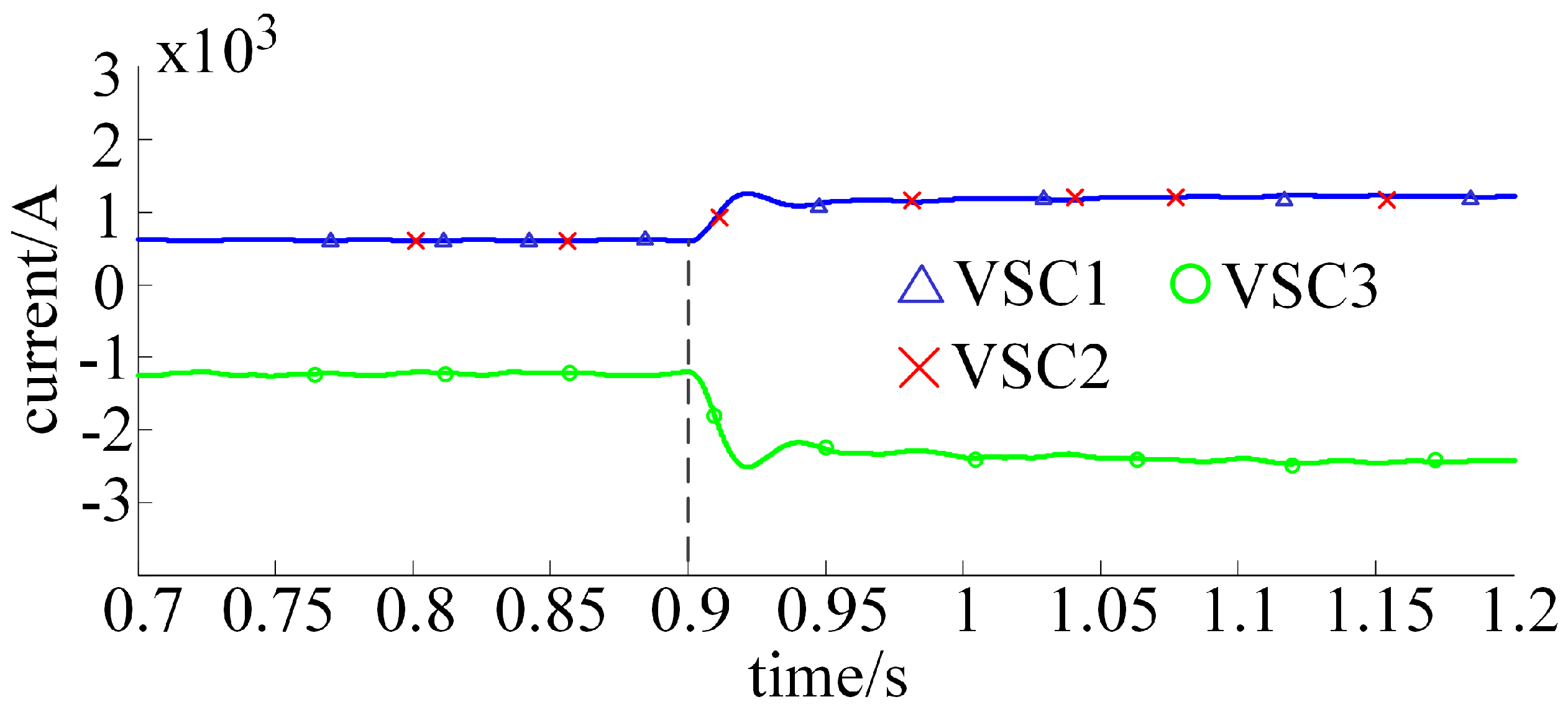
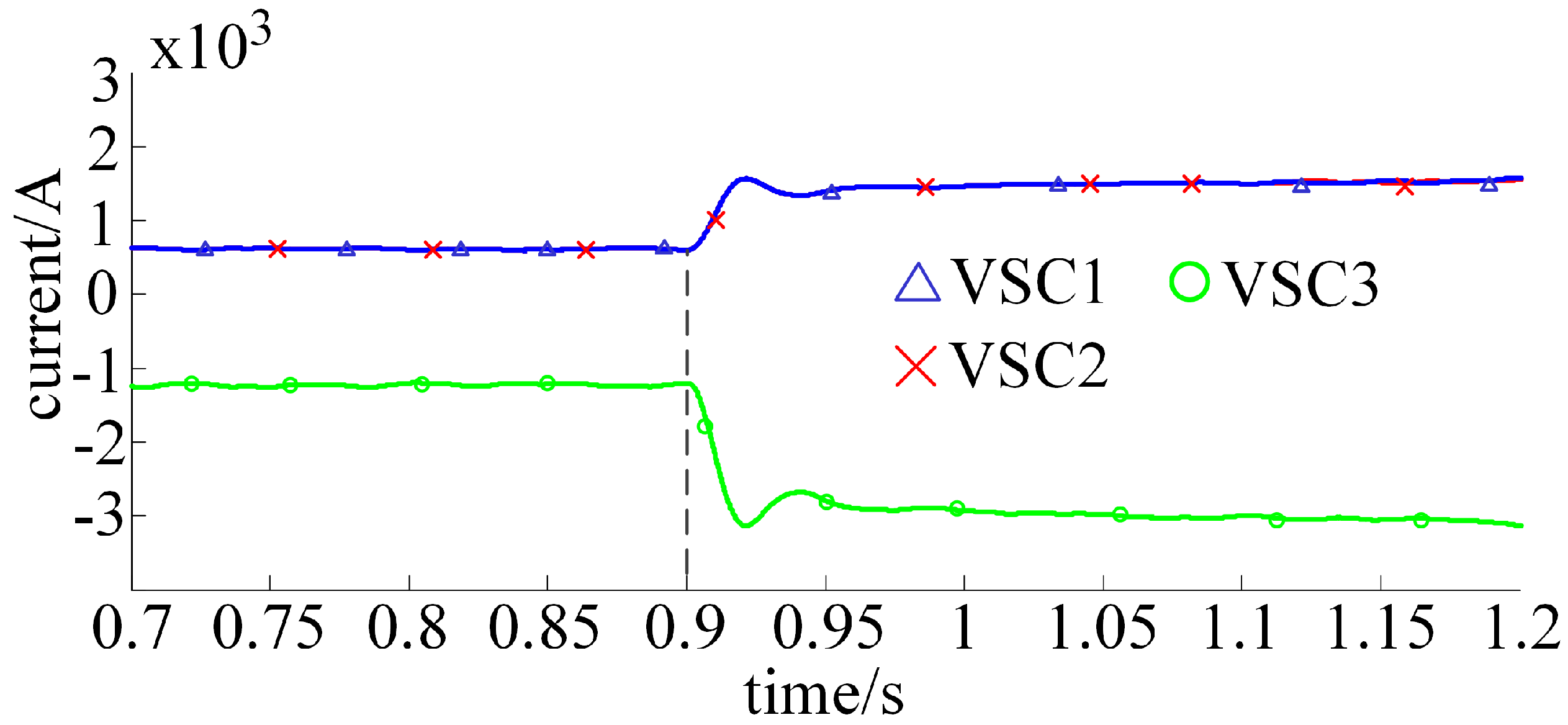
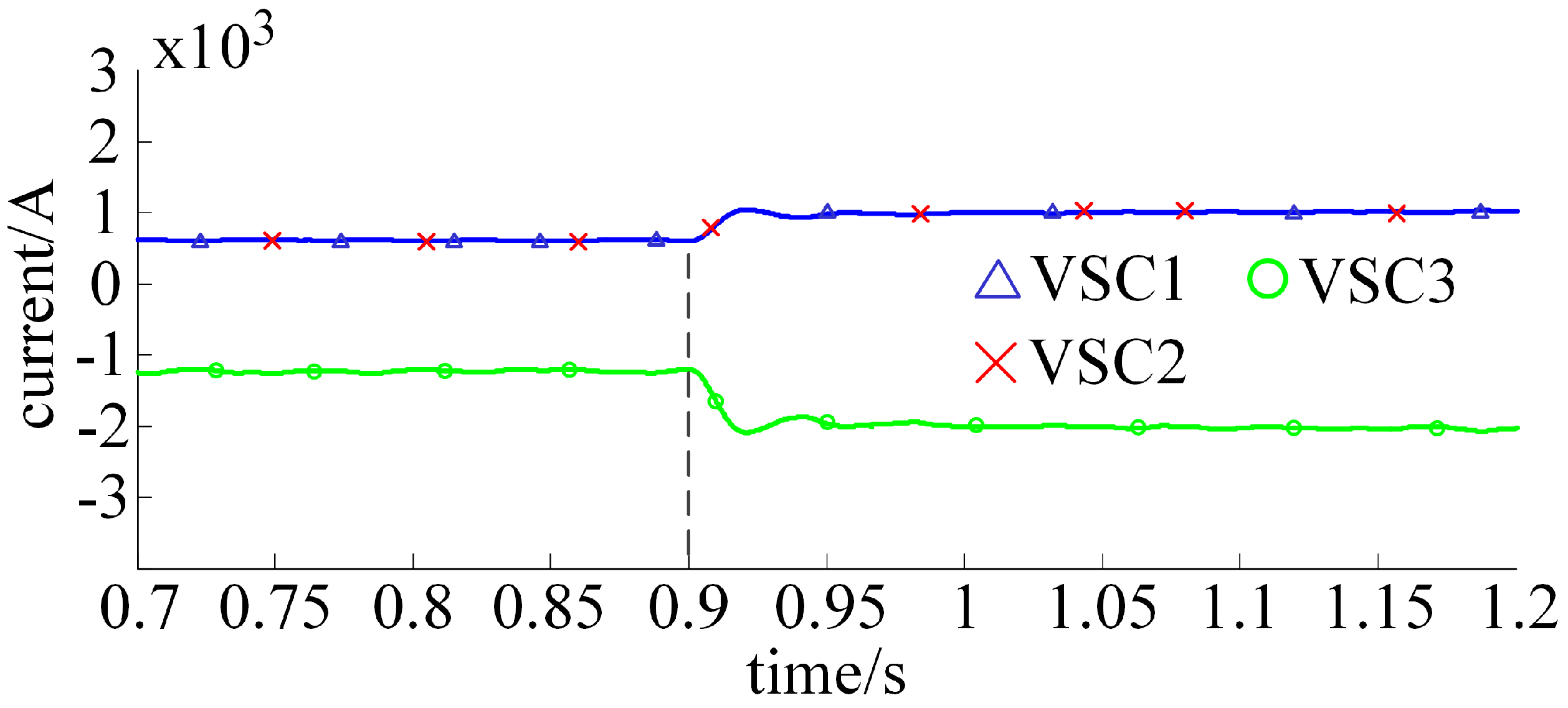
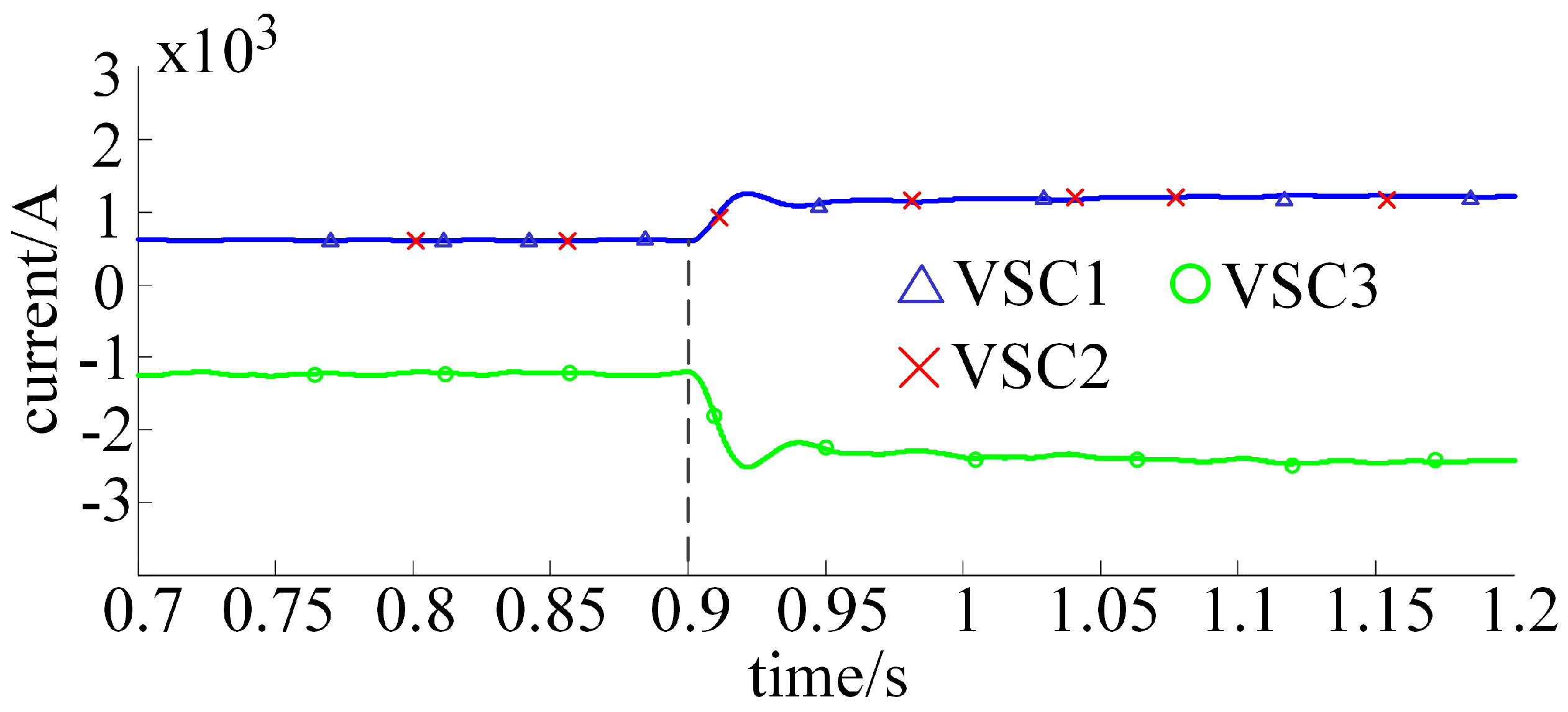
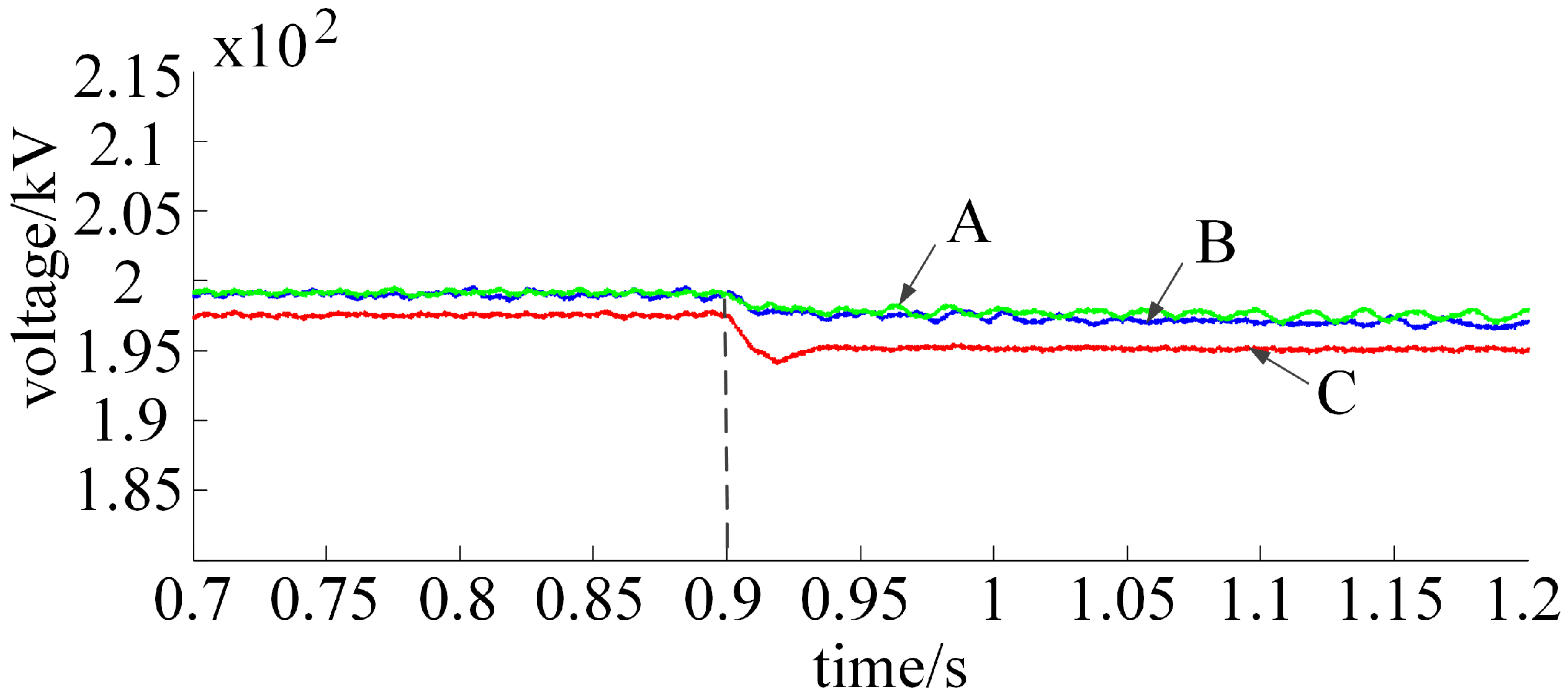
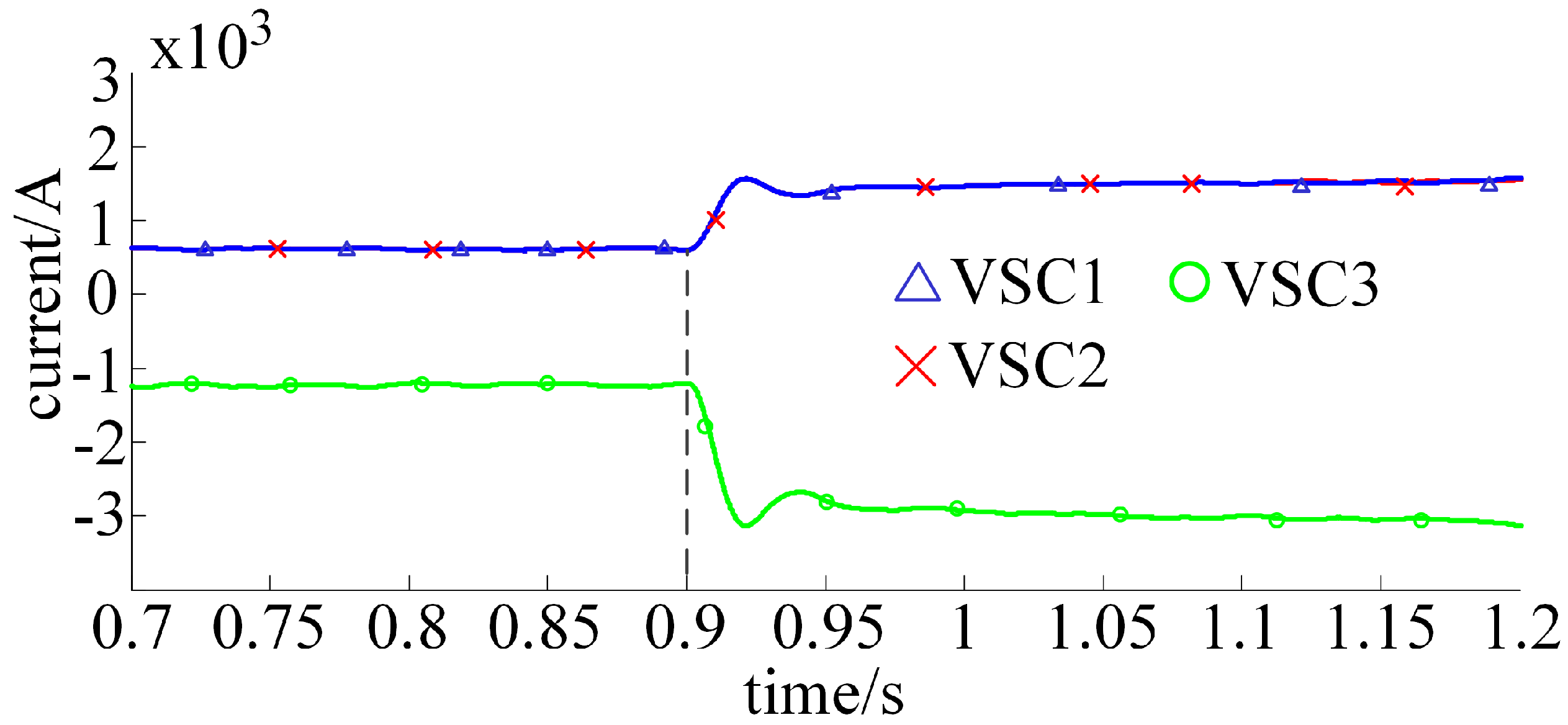
4.2. Power Fluctuation Simulation Results
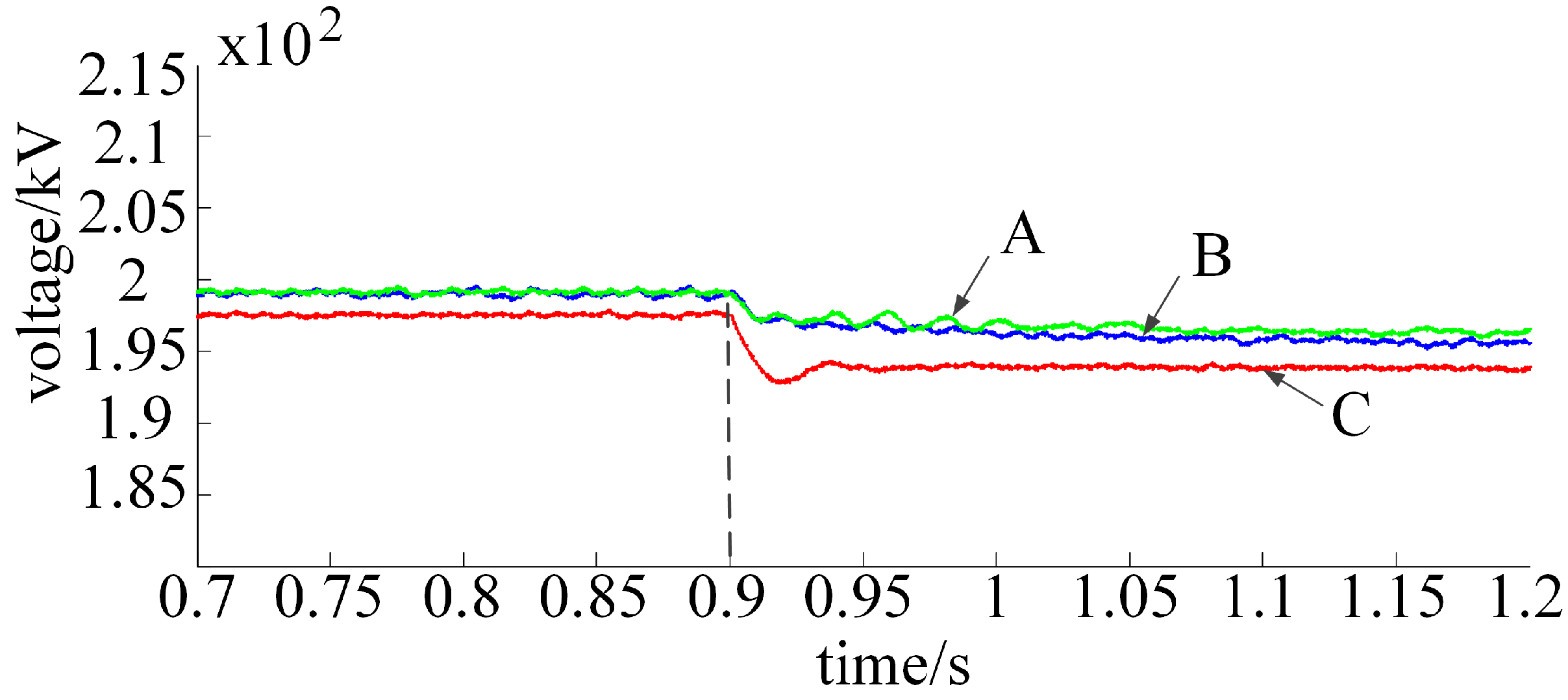
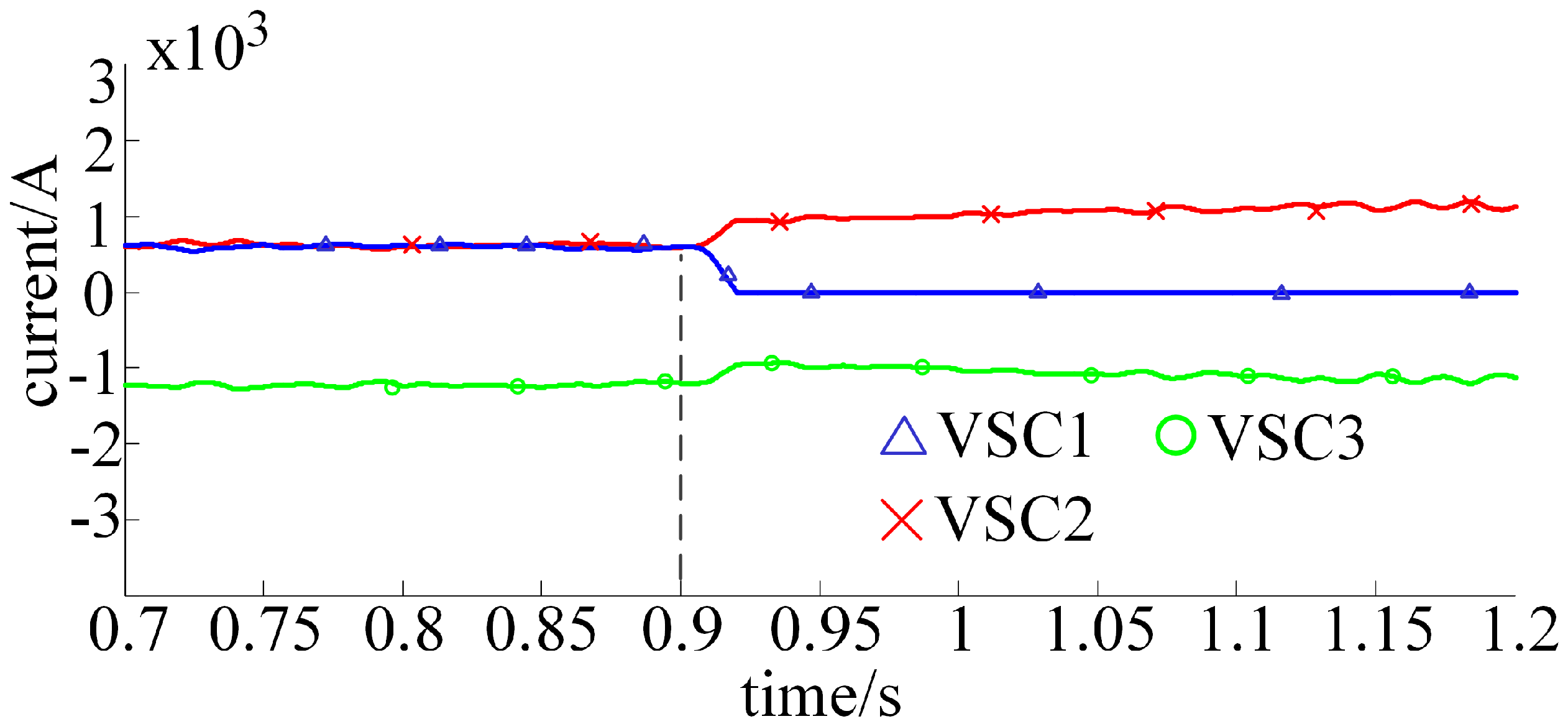
4.3. Three-Terminal System N-1 Verification
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dong, H.; Xu, Z.; Song, P.; Tang, G.; Xu, Q.; Sun, L. Optimized Power Redistribution of Offshore Wind Farms Integrated VSC-MTDC Transmissions After Onshore Converter Outage. IEEE Trans. Ind. Electron. 2017, 64, 8948–8958. [Google Scholar] [CrossRef]
- Wei, X.; Tang, G.; Wei, X.; Zhang, Z. Study of VSC-HVDC controller to mitigate voltage fluctuation caused by wind farm integration. Diangong Jishu Xuebao/Trans. China Electrotech. Soc. 2007, 22, 150–156. [Google Scholar]
- Sang, Y.; Yang, B.; Yao, W.; Jiang, L. Design and Implementation of Perturbation Observer based Robust Passivity-based Control for VSC-MTDC Systems Considering Offshore Wind Power Integration. IET Gener. Transm. Distrib. 2018, 12, 2415–2424. [Google Scholar] [CrossRef]
- Du, W.; Qian, F.; Wang, H. Method of Open-loop Modal Analysis for Examining the Sub-synchronous Interactions Introduced by VSC Control in a MTDC/AC System. IEEE Trans. Power Deliv. 2017, 33, 840–850. [Google Scholar] [CrossRef]
- Wu, W.; Wu, X.; Zhao, Y.; Wang, L.; Zhao, T.; Jing, L. An Improved Multiport DC Power Flow Controller for VSC-MTDC Grids. IEEE Access 2020, 8, 7573–7586. [Google Scholar] [CrossRef]
- Wang, W.; Yin, X.; Cao, Y.; Jiang, L.; Li, Y. A Distributed Cooperative Control Based on Consensus Protocol for VSC-MTDC Systems. IEEE Trans. Power Syst. 2021, 36, 2877–2890. [Google Scholar] [CrossRef]
- Dong, H.; Su, M.; Liu, K.; Zou, W. Mitigation Strategy of Subsynchronous Oscillation Based on Fractional-Order Sliding Mode Control for VSC-MTDC Systems with DFIG-Based Wind Farm Access. IEEE Access 2020, 8, 209242–209250. [Google Scholar] [CrossRef]
- Li, B.; Li, Q.; Wang, Y.; Wen, W.; Li, B.; Xu, L. A Novel Method to Determine Droop Coefficients of DC Voltage Control for VSC-MTDC System. IEEE Trans. Power Deliv. 2020, 35, 2475–2479. [Google Scholar] [CrossRef]
- Dierckxsens, C.; Srivastava, K.; Reza, M.; Cole, S.; Beerten, J.; Belmans, R. A distributed DC voltage control method for VSC MTDC systems. Electr. Power Syst. Res. 2012, 82, 54–58. [Google Scholar] [CrossRef]
- Li, B.; Li, Y.; He, J.; Wen, W. A Novel Single-Ended Transient-Voltage-Based Protection Strategy for Flexible DC Grid. IEEE Trans. Power Deliv. 2019, 34, 1925–1937. [Google Scholar] [CrossRef]
- Sayed, S.S.; Massoud, A.M. A generalized approach for design of contingency versatile DC voltage droop control in multi-terminal HVDC networks. Int. J. Electr. Power Energy Syst. 2021, 126, 106413. [Google Scholar] [CrossRef]
- Zhou, T.; Chen, Z.; Zhao, J.; Xu, C.; Teng, X. A novel electromechanical transient analysis technique of VSC-MTDC considering DC-PCC and its application to AC/DC hybrid system simulation. IEEE Access 2019, 7, 47011–47021. [Google Scholar] [CrossRef]
- Zhang, L.; Harnefors, L.; Nee, H.P. Modeling and control of VSC-HVDC links connected to island systems. IEEE Trans. Power Syst. 2010, 26, 783–793. [Google Scholar] [CrossRef]
- Lu, W.; Ooi, B.T. DC overvoltage control during loss of converter in multiterminal voltage-source converter-based HVDC (M-VSC-HVDC). IEEE Trans. Power Deliv. 2003, 18, 915–920. [Google Scholar]
- Haileselassie, T.M.; Uhlen, K. Impact of DC line voltage drops on power flow of MTDC using droop control. IEEE Trans. Power Syst. 2012, 27, 1441–1449. [Google Scholar] [CrossRef]
- Irnawan, R.; Silva, F.; Bak, C.L.; Lindefelt, A.M.; Alefragkis, A. A droop line tracking control for multi-terminal VSC-HVDC transmission system. Electr. Power Syst. Res. 2020, 179, 106055. [Google Scholar] [CrossRef]
- Song, S.; McCann, R.A.; Jang, G. Cost-based adaptive droop control strategy for VSC-MTDC system. IEEE Trans. Power Syst. 2020, 36, 659–669. [Google Scholar] [CrossRef]
- Wang, Y.; Wen, W.; Wang, C.; Liu, H.; Zhan, X.; Xiao, X. Adaptive Voltage Droop Method of Multiterminal VSC-HVDC Systems for DC Voltage Deviation and Power Sharing. IEEE Trans. Power Deliv. 2018, 34, 169–176. [Google Scholar]
- Xiao, L.; Xu, Z.; An, T.; Bian, Z. Improved Analytical Model for the Study of Steady State Performance of Droop-controlled VSC-MTDC Systems. IEEE Trans. Power Syst. 2016, 32, 2083–2093. [Google Scholar] [CrossRef]
- Pinto, R.T.; Bauer, P.; Rodrigues, S.F.; Wiggelinkhuizen, E.J.; Pierik, J.; Ferreira, B. A novel distributed direct-voltage control strategy for grid integration of offshore wind energy systems through MTDC network. IEEE Trans. Ind. Electron. 2012, 60, 2429–2441. [Google Scholar] [CrossRef]
- Alavi, S.M.; Ghazi, R. A novel control strategy based on a look-up table for optimal operation of MTDC systems in post-contingency conditions. Prot. Control Mod. Power Syst. 2022, 7, 1–7. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Y.; Zeng, Q.; Li, J. Improed droop control strategy for VSC-MTDC. High Volt. Eng. 2018, 44, 3190–3196. [Google Scholar]
- Wu, W.; Chen, Y.; Zhou, L.; Zhou, X.; Yang, L.; Dong, Y.; Xie, Z.; Luo, A. A Virtual Phase-Lead Impedance Stability Control Strategy for the Maritime VSC–HVDC System. IEEE Trans. Ind. Inform. 2018, 14, 5475–5486. [Google Scholar] [CrossRef]
- Saif, M. An Improved Droop-Based Control Strategy for MT-HVDC Systems. Electronics 2020, 9, 87. [Google Scholar]
- Zhu, R.; Li, X.; Wu, F. A novel droop control strategy taking into account the available headroom for VSC-MTDC system. J. Sichuan Univ. Sci. Ed. 2015, 47, 137–143. [Google Scholar]
- Lun, Y.; Li, Y.; Wang, P. DC voltage adaptive droop control of multi-terminal HVDC systems. Proc. CSEE 2016, 36, 2588–2599. [Google Scholar]
- Han, M.; Xie, W.; Cao, W.; Zhang, W.; Yang, J. Application scenarios and system design of medium-voltage DC distribution network. Autom. Electr. Power Syst. 2019, 43, 81–93. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Parameter Name | Parameter Value |
|---|---|---|
| 1 | Outer ring proportional | 0.55 |
| 2 | Outer loop integral | 25 |
| 3 | Inner ring proportional | 2.5 |
| 4 | Inner loop integral | 20 |
| 5 | Sampling period | 5 × 10−6 s |
| 6 | DC side capacitance C | 2000 uF |
| 7 | AC filter inductor L | 3 mH |
| 8 | AC filter resistor R | 0.03 Ω |
| Different Droop Coefficients | DC Side Steady-State Voltage (kV) | ||
|---|---|---|---|
| Traditional Droop Control | Adaptive Droop Control [26] | Adaptive Exponential Droop Control | |
| 196.9 | 197.9 | 198.3 | |
| 195.6 | 197.1 | 197.7 | |
| 194.4 | 196.4 | 197.2 | |
| 193.1 | 195.7 | 196.5 | |
| Droop Coefficient | |||||
|---|---|---|---|---|---|
| 3.1 | 2.1 | 1.7 | 32.26 | 45.16 | |
| 4.4 | 2.9 | 2.3 | 34.09 | 47.73 | |
| 5.6 | 3.6 | 2.8 | 35.71 | 50 | |
| 6.9 | 4.3 | 3.5 | 37.68 | 49.28 |
| VSC3 Active Power Variation | DC Side Steady-State Voltage (kV) | ||
|---|---|---|---|
| Traditional Droop Control | Adaptive Droop Control [26] | Adaptive Exponential Droop Control | |
| 240–400 MW | 195.8 | 197.7 | 198.2 |
| 240–480 MW | 195.0 | 196.7 | 197.4 |
| 240–600 MW | 193.8 | 195.1 | 196.2 |
| VSC3 Active Power Variation | |||||
|---|---|---|---|---|---|
| 240–400 MW | 4.2 | 2.3 | 1.8 | 45.24 | 57.14 |
| 240–480 MW | 5 | 3.3 | 2.6 | 34 | 48 |
| 240–600 MW | 6.2 | 4.9 | 3.8 | 20.97 | 38.71 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Yang, M.; Li, J.; Xiao, Y.; Wan, J. Research on Adaptive Exponential Droop Control Strategy for VSC-MTDC System. Electronics 2022, 11, 2788. https://doi.org/10.3390/electronics11172788
Li J, Yang M, Li J, Xiao Y, Wan J. Research on Adaptive Exponential Droop Control Strategy for VSC-MTDC System. Electronics. 2022; 11(17):2788. https://doi.org/10.3390/electronics11172788
Chicago/Turabian StyleLi, Jianying, Minsheng Yang, Jianqi Li, Yunchang Xiao, and Jingying Wan. 2022. "Research on Adaptive Exponential Droop Control Strategy for VSC-MTDC System" Electronics 11, no. 17: 2788. https://doi.org/10.3390/electronics11172788
APA StyleLi, J., Yang, M., Li, J., Xiao, Y., & Wan, J. (2022). Research on Adaptive Exponential Droop Control Strategy for VSC-MTDC System. Electronics, 11(17), 2788. https://doi.org/10.3390/electronics11172788