
Application of Improved Quasi-Affine Transformation Evolutionary Algorithm in Power System Stabilizer Optimization
Abstract
:1. Introduction
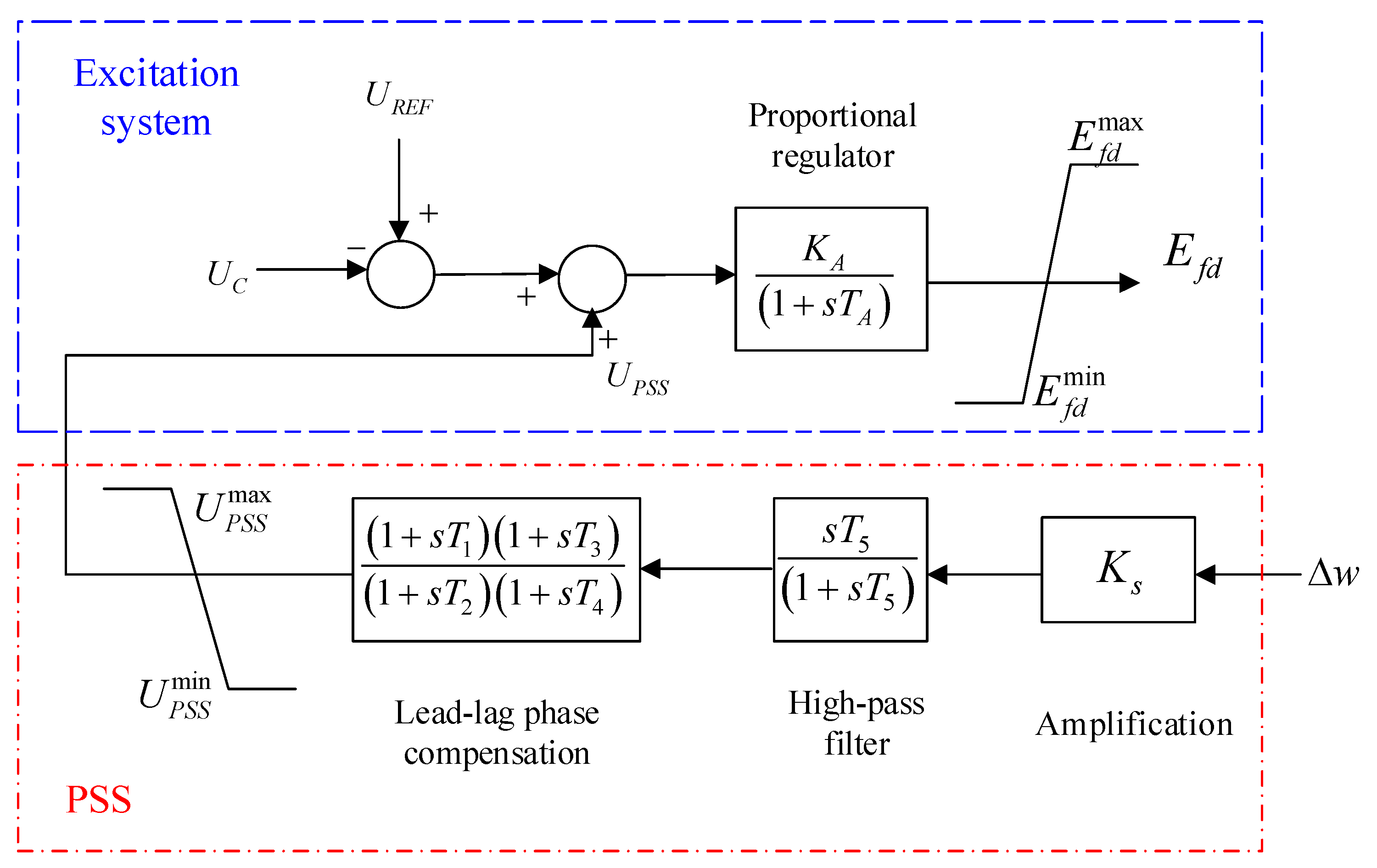
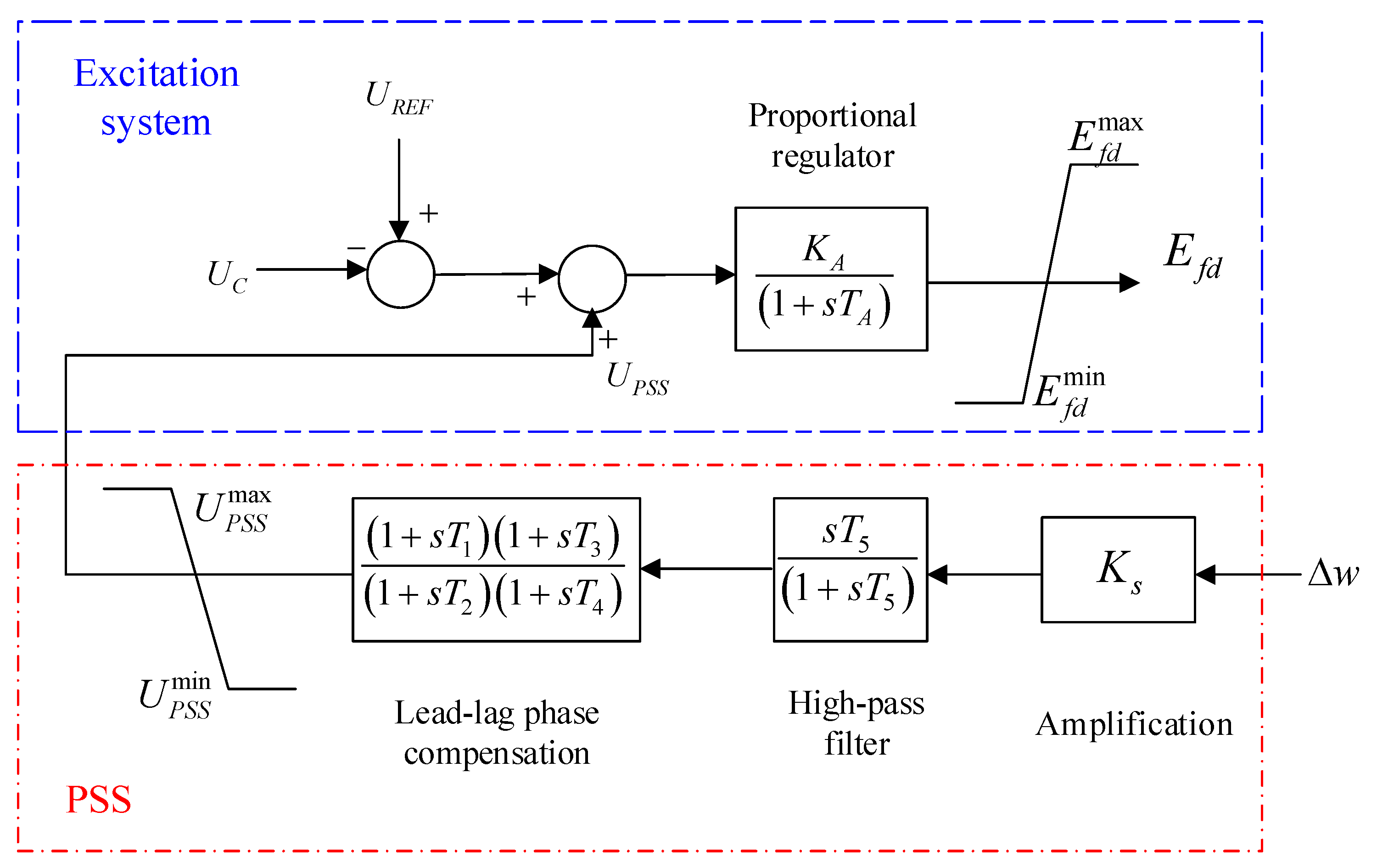
2. Parameter Optimization of PSS for Multi-Machine System
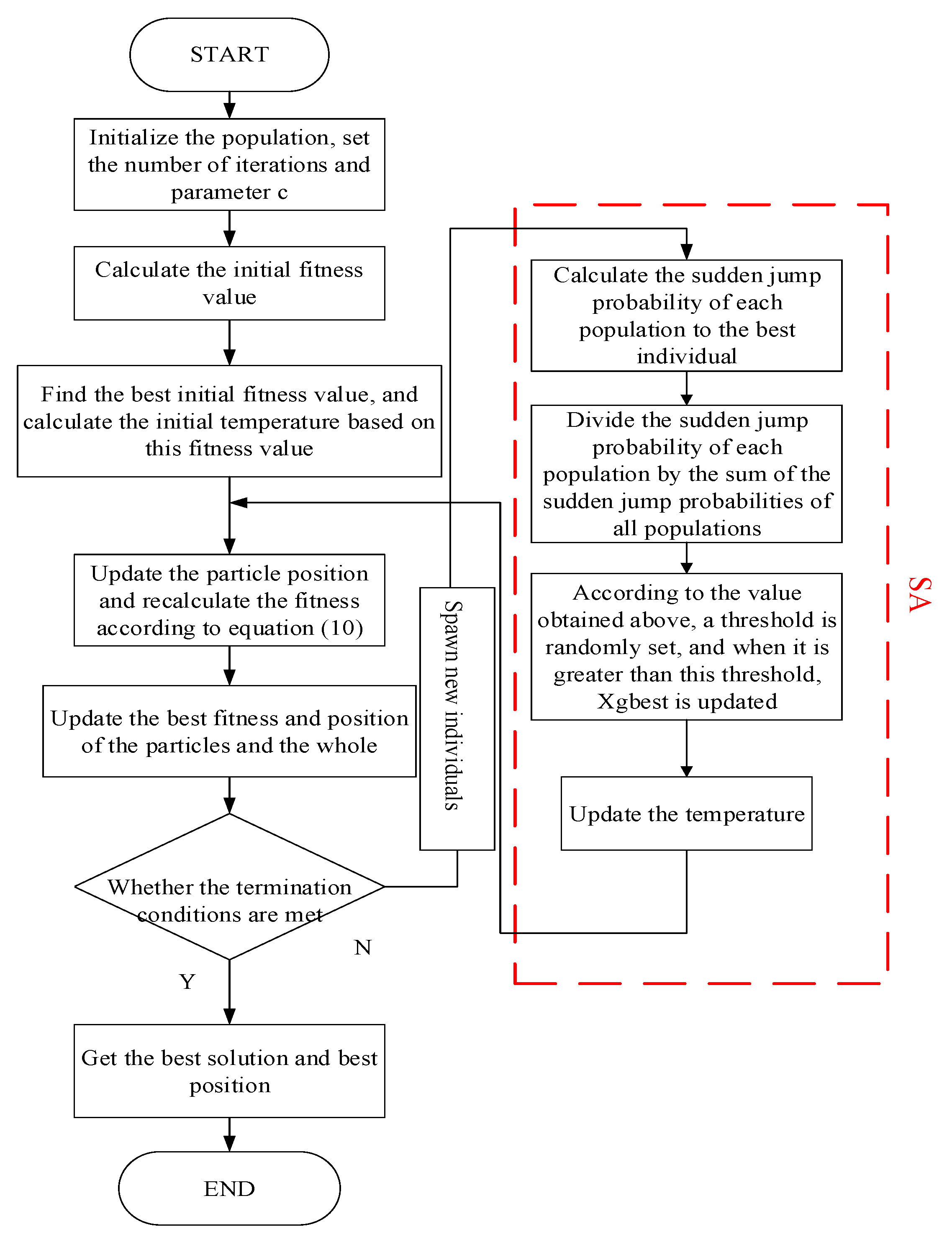
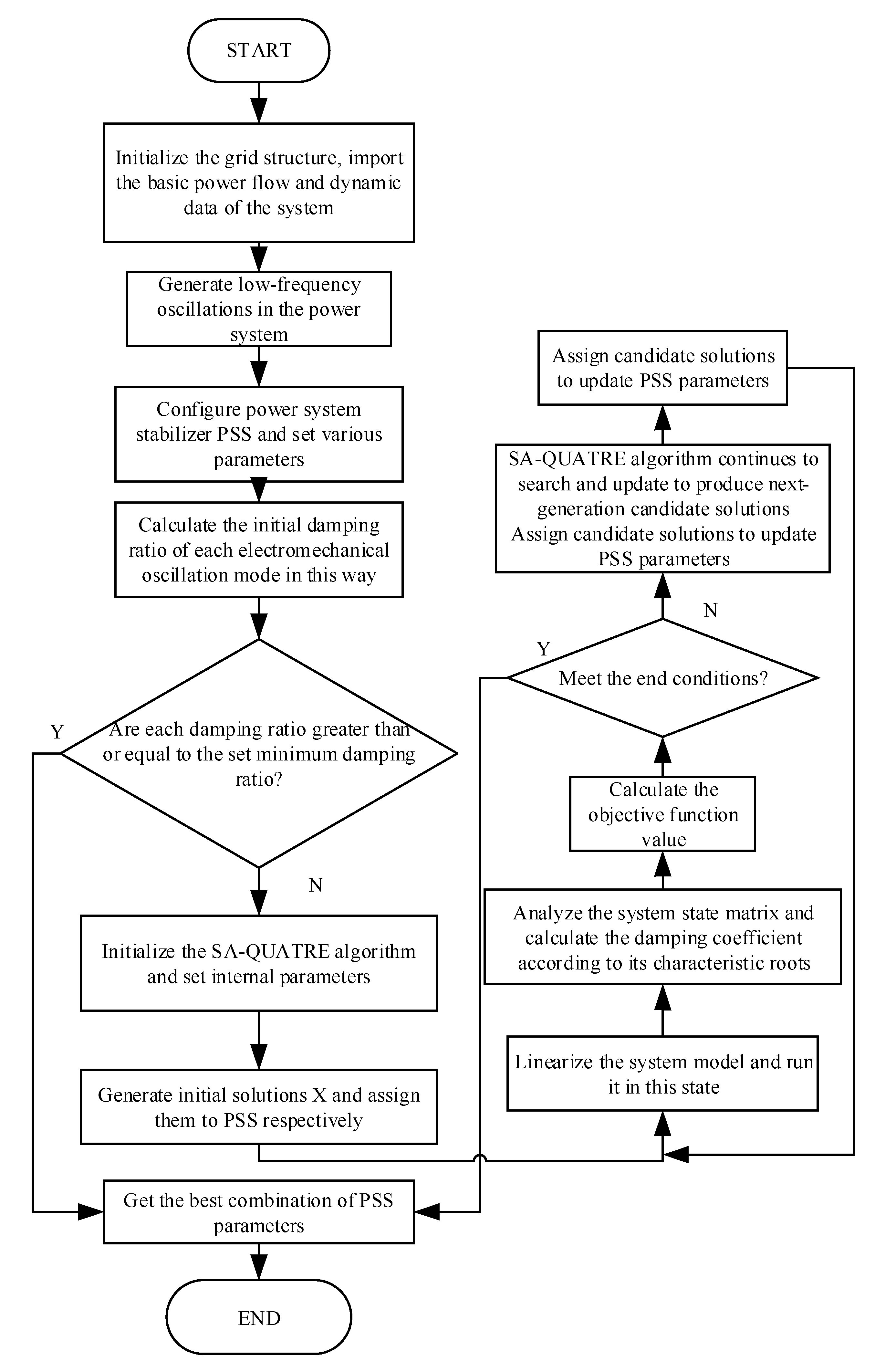
3. PSS Parameter Optimization Based on SA-QUATRE Algorithm
- (1)
- First, import the basic power flow and dynamic data of the grid and configure the number and position of power system stabilizers according to the electromechanical oscillation characteristics of the power system to be analyzed. In the power system, installing power system stabilizers for each generator is unrealistic. So, the residue method is used to choose the installation location of PSS in this article [22];
- (2)
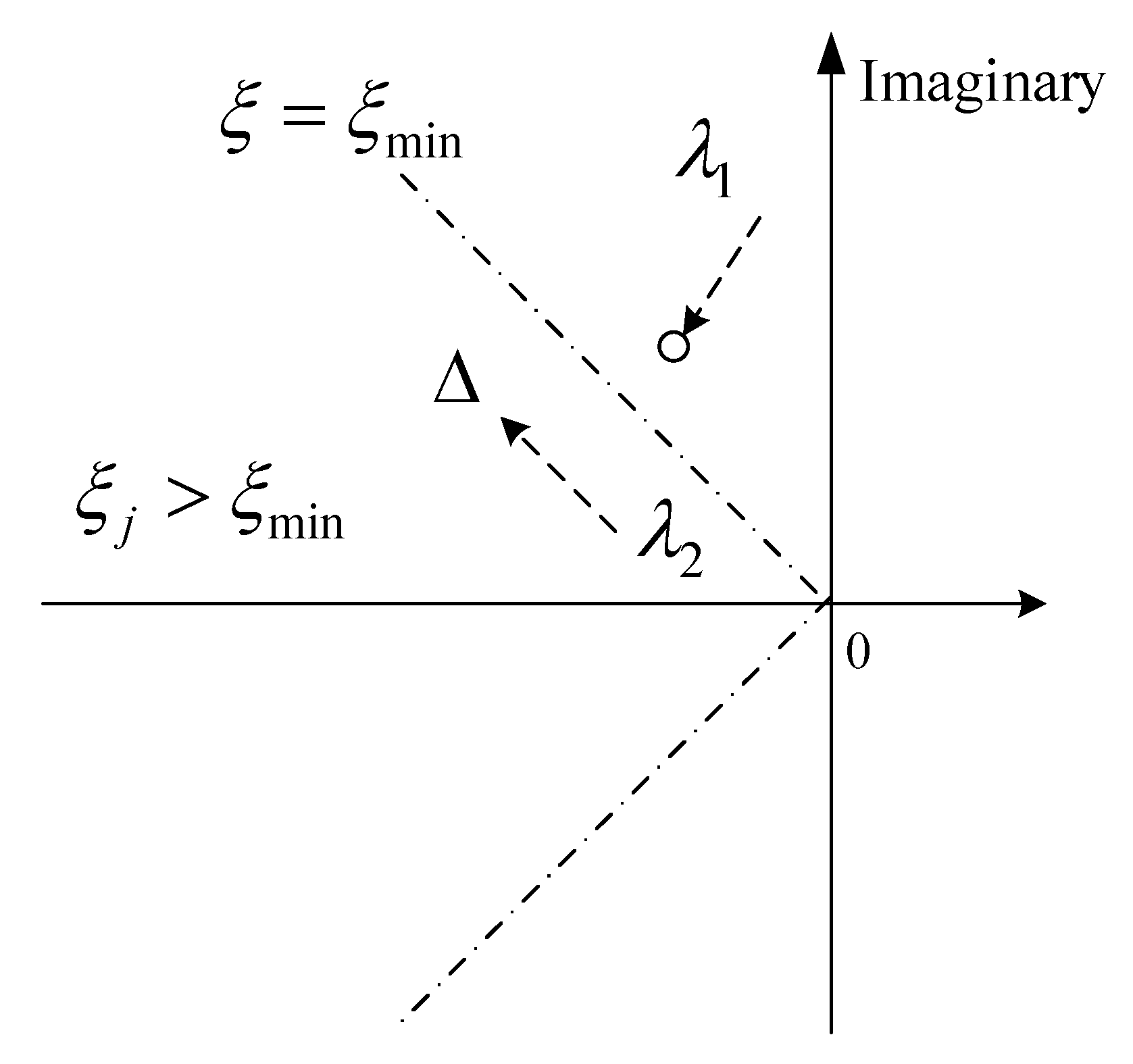
- Set the parameters and operating mode of the power system stabilizer, linearize the system model and calculate the initial damping ratio in this mode through eigenvalues. If all are greater than ξmin, then end, otherwise continue;
- (3)
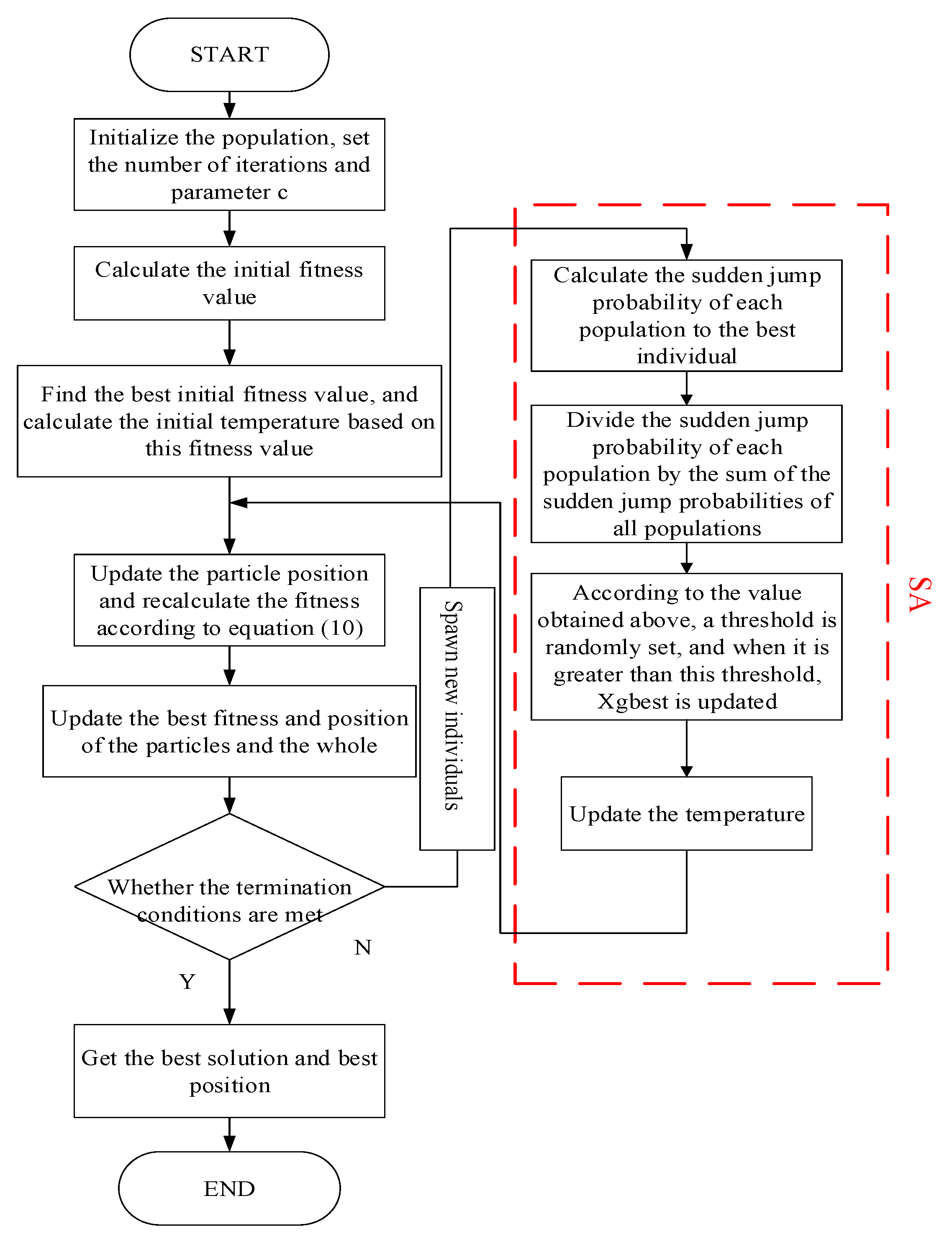
- Initialize the parameters of the SA-QUATRE algorithm and simulated annealing, and at the same time, generate a set of initial solutions ;
- (4)
- Assign each solution Xi to the variable in the PSS and calculate the damping coefficient of each electromechanical oscillation mode under this operating state;
- (5)
- Evaluate the group according to the objective function based on characteristic value;
- (6)
- Use the improved quasi-affine transformation evolutionary algorithm to continuously update and search, generate offspring populations, and update next-generation candidate solutions;
- (7)
- The operation ends when reaching the maximum number of iterations, otherwise, it returns to the (4) step and enters the next cycle;
- (8)
- Finally, obtain the global optimal parameter combination of PSS and the fitness value of the objective function. The specific process is as follows:
4. Simulation Example
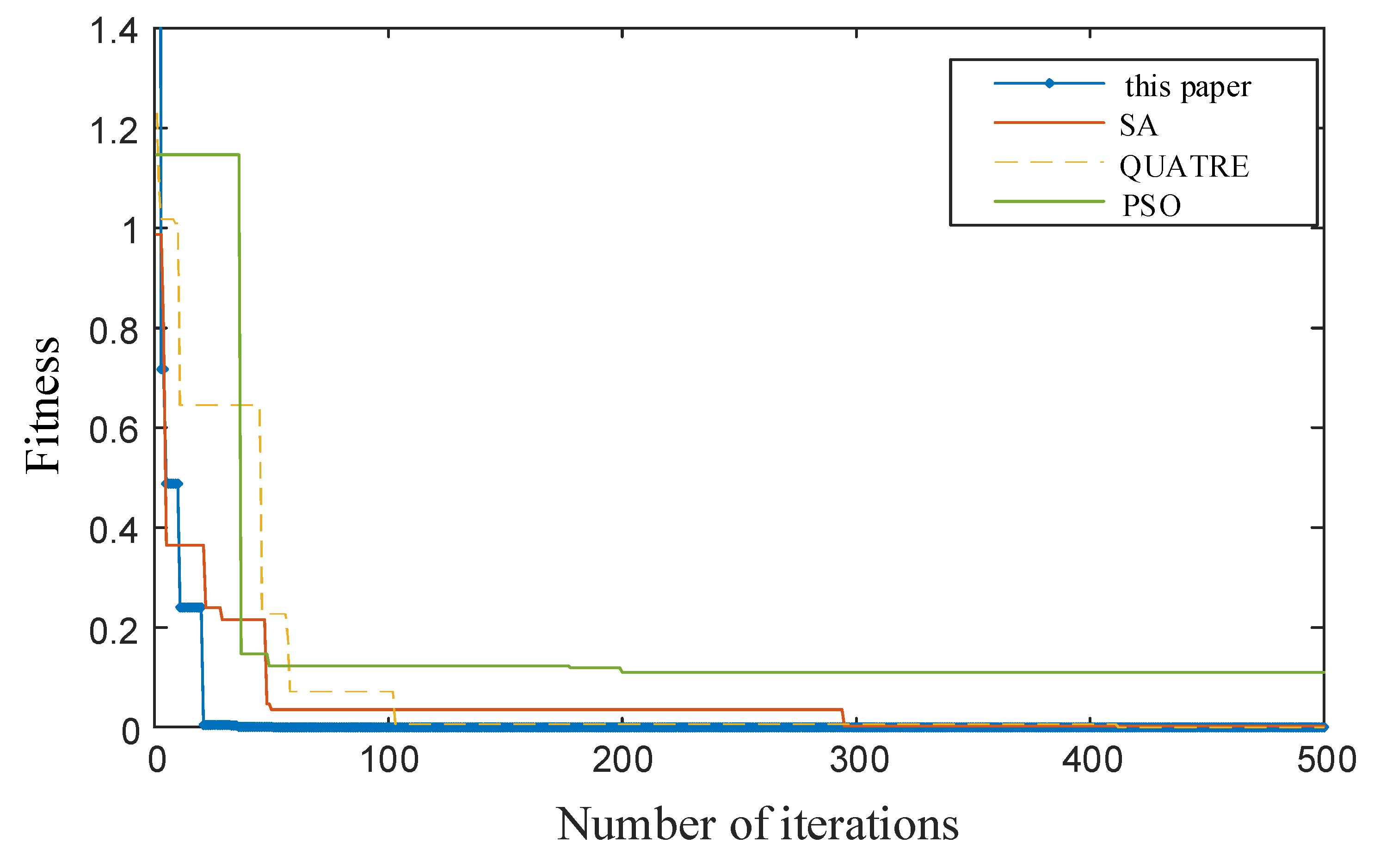
4.1. Algorithm Robustness Analysis
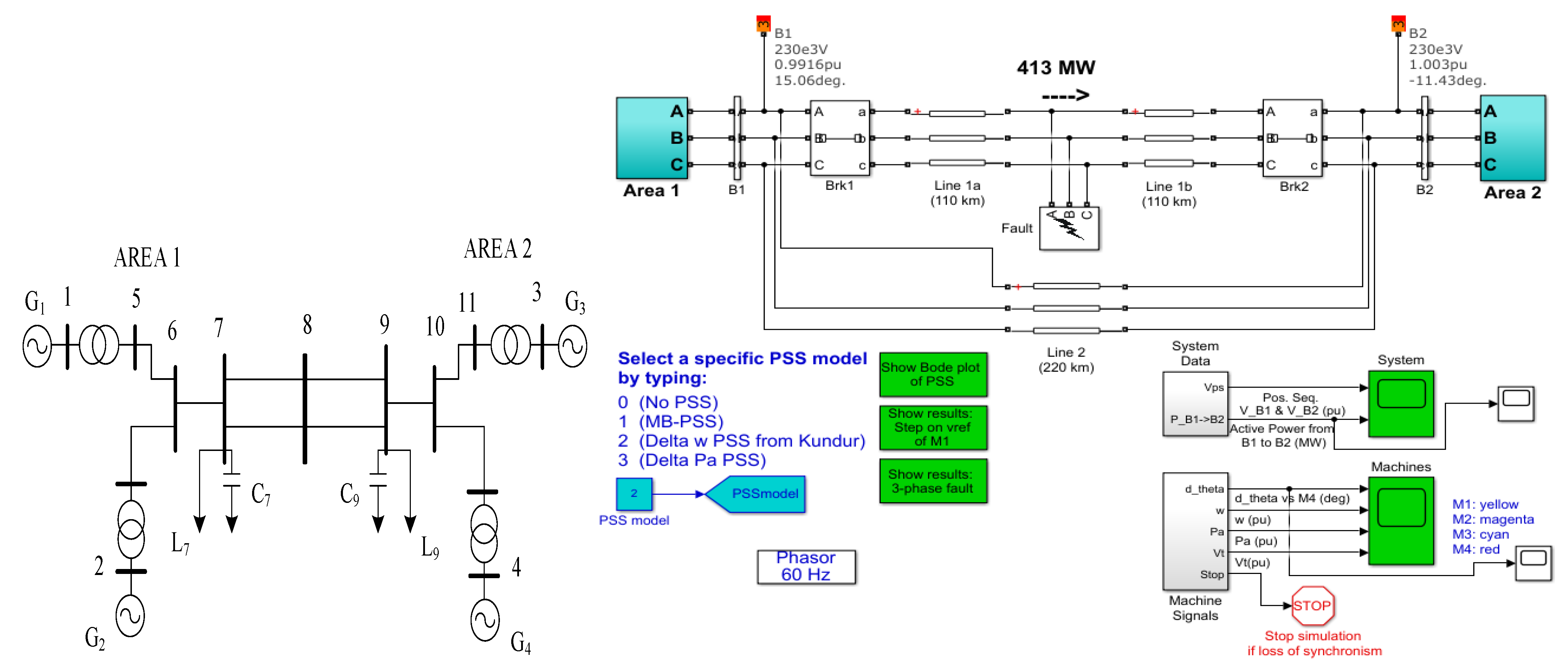
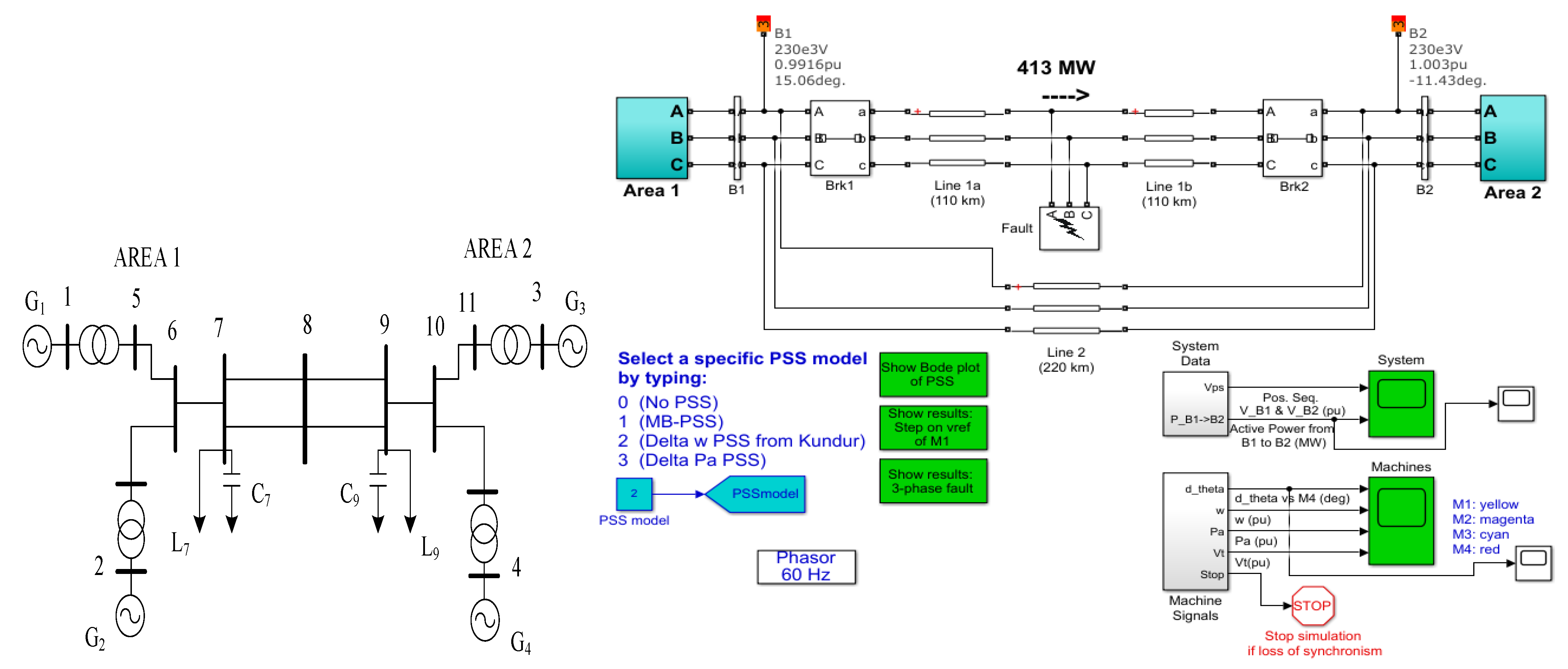
4.2. IEEE 4-Machine 2-Area System
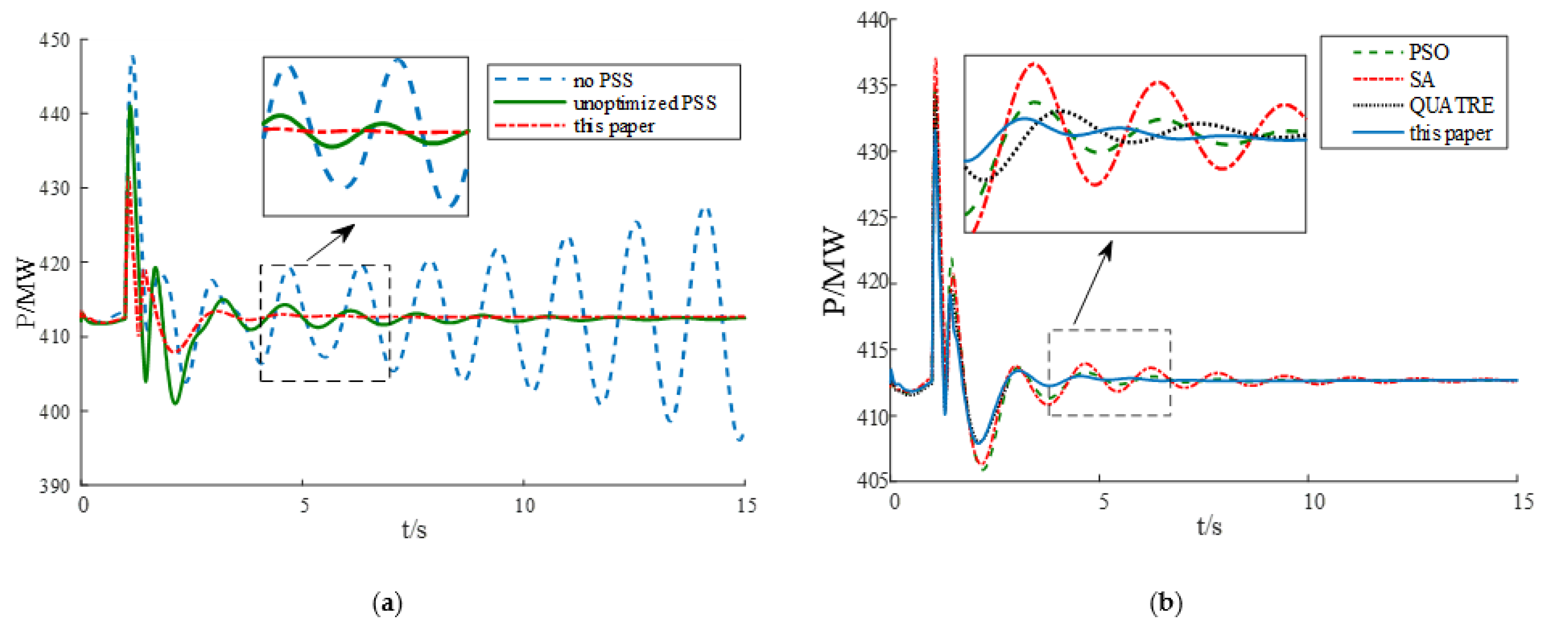
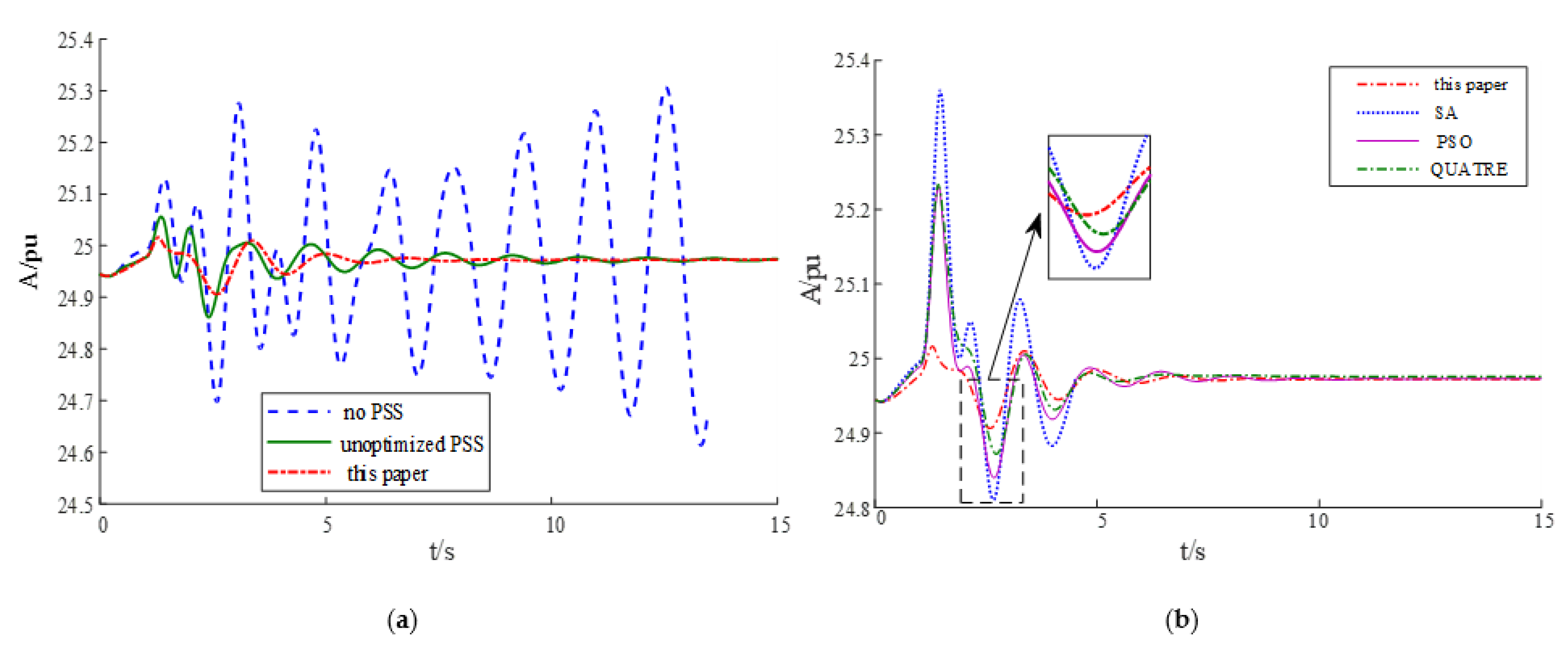
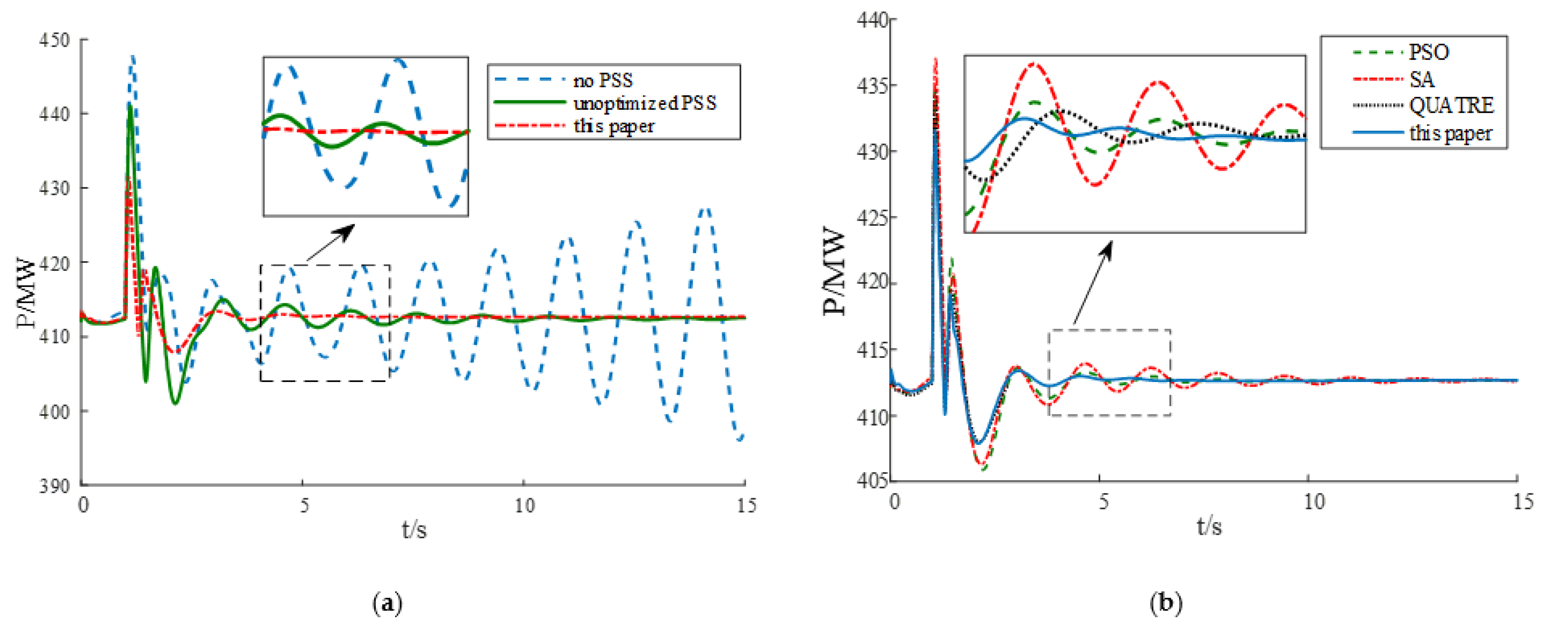
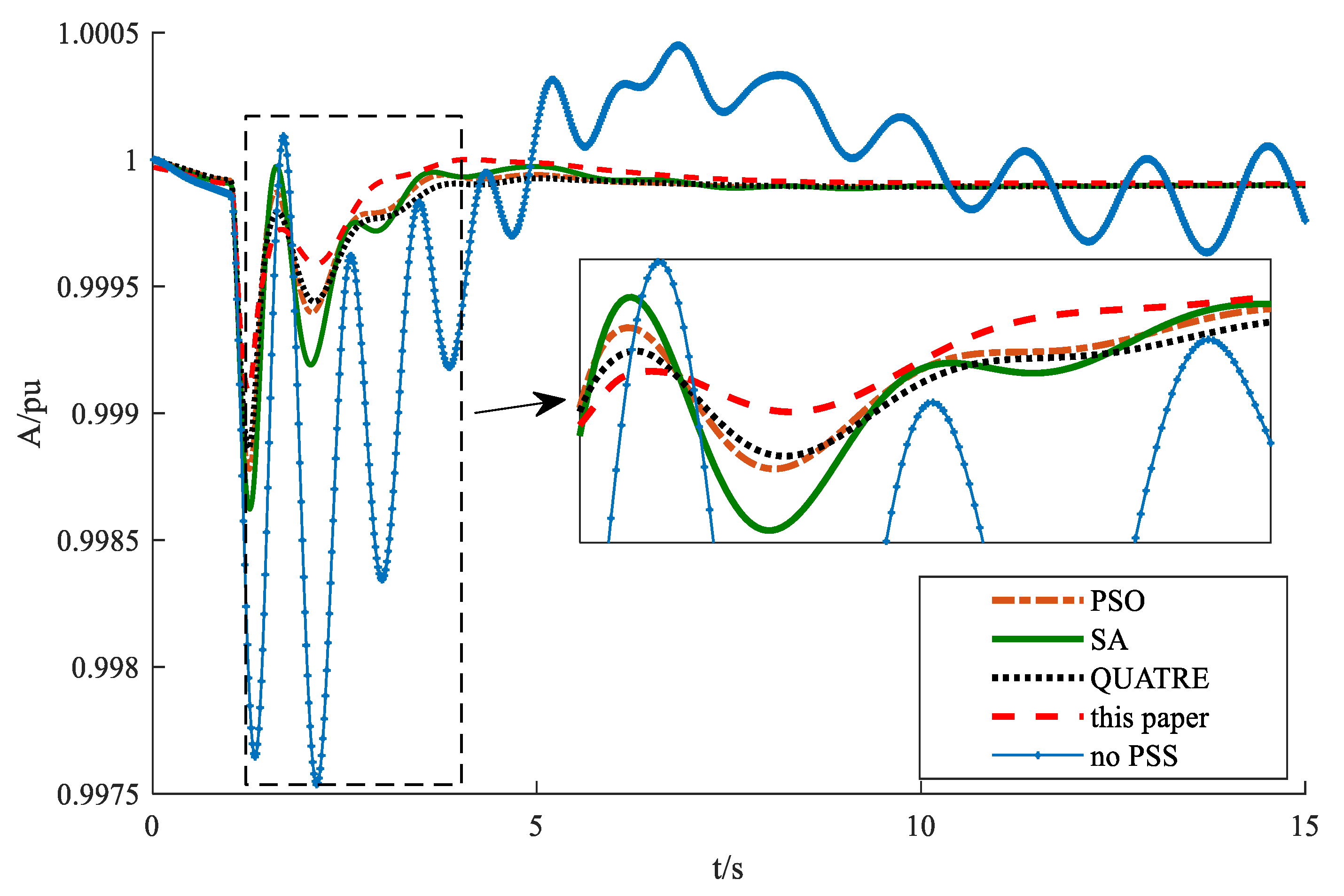
4.2.1. Small Disturbance
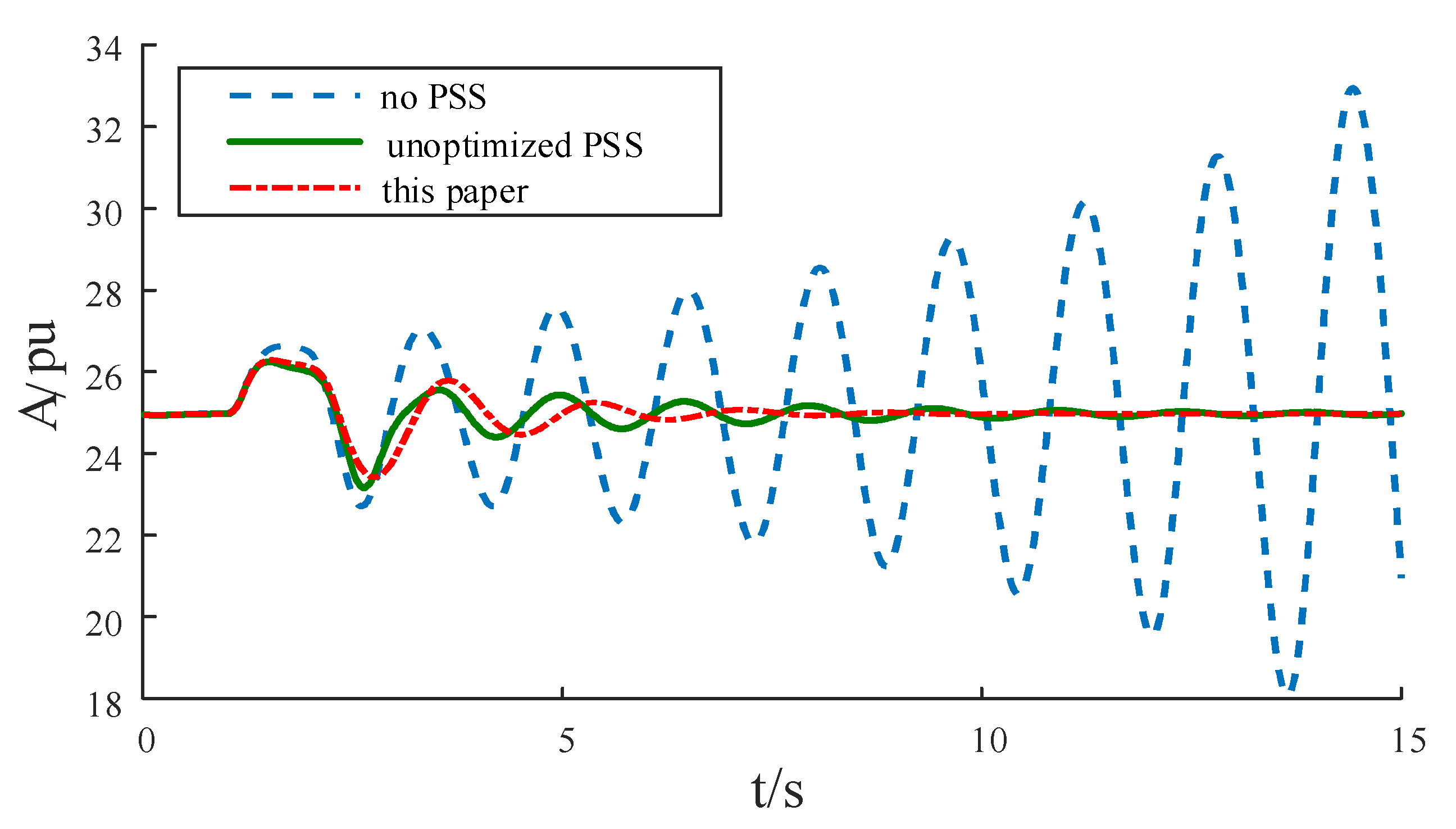
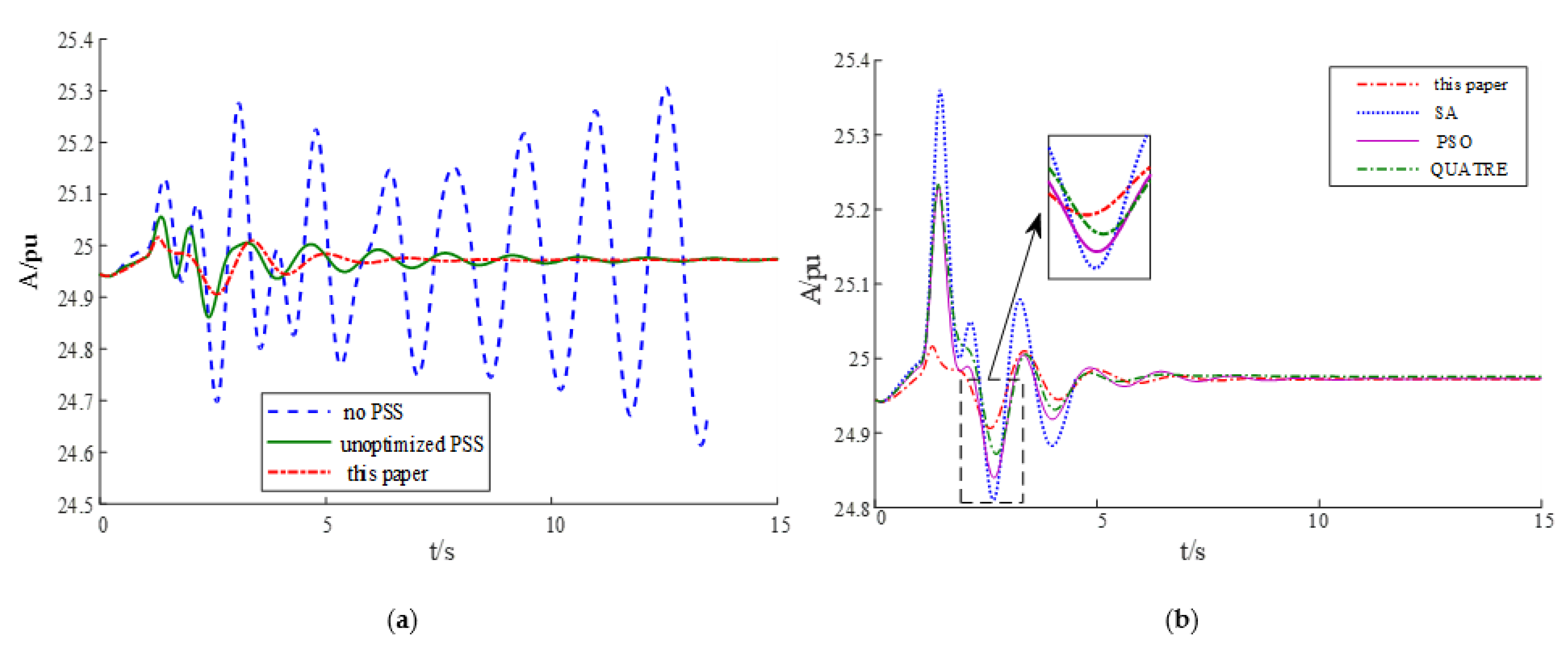
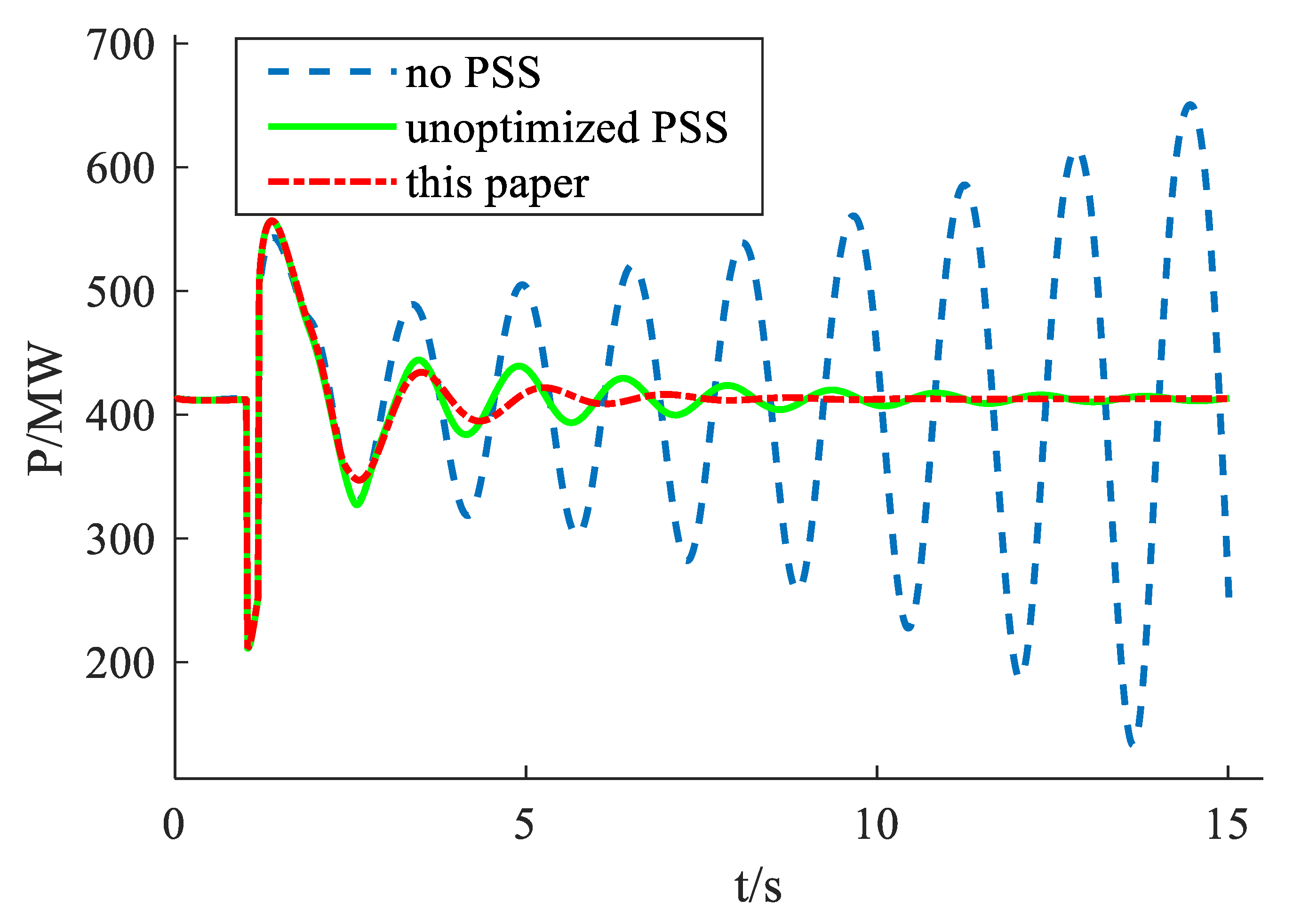
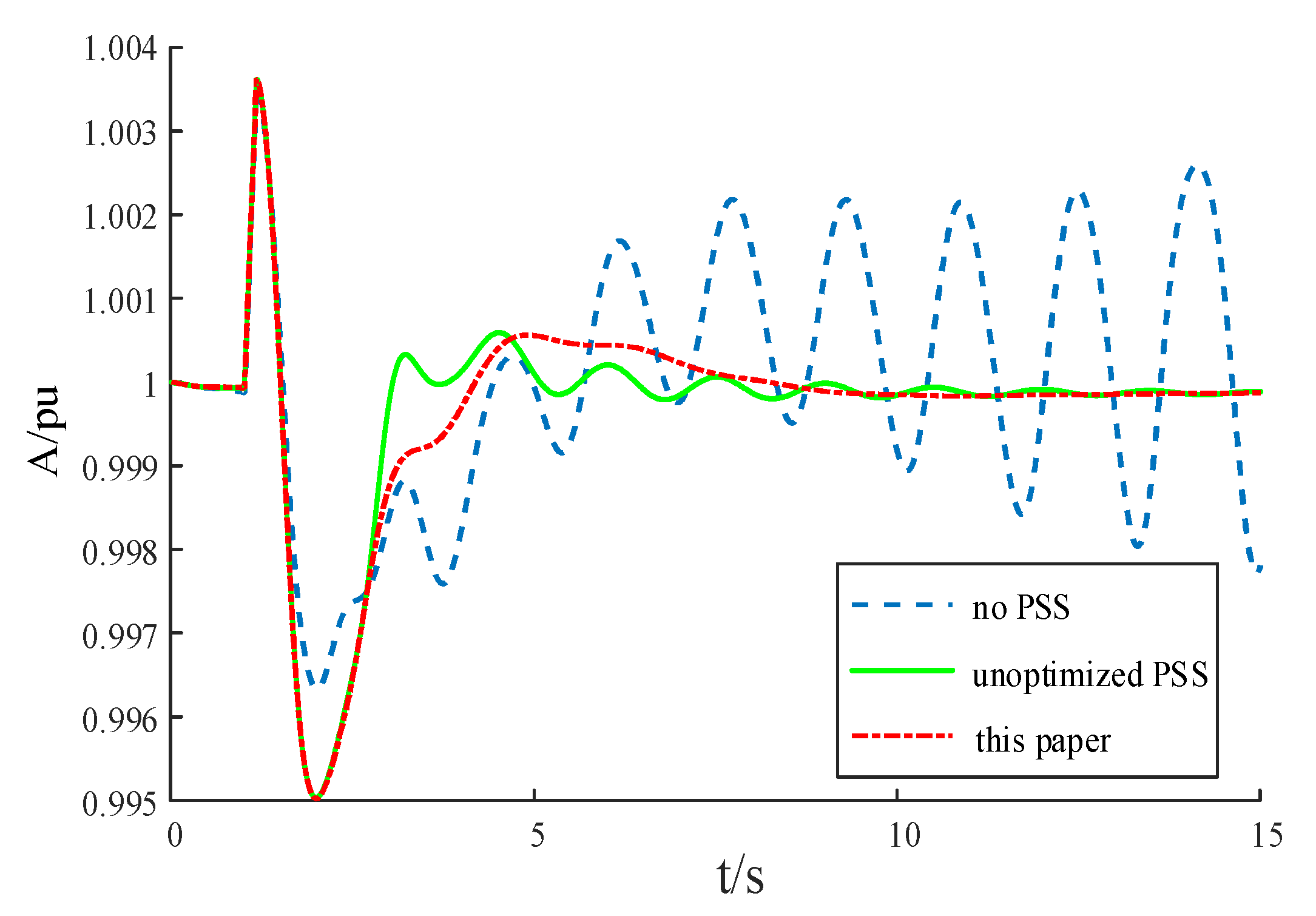
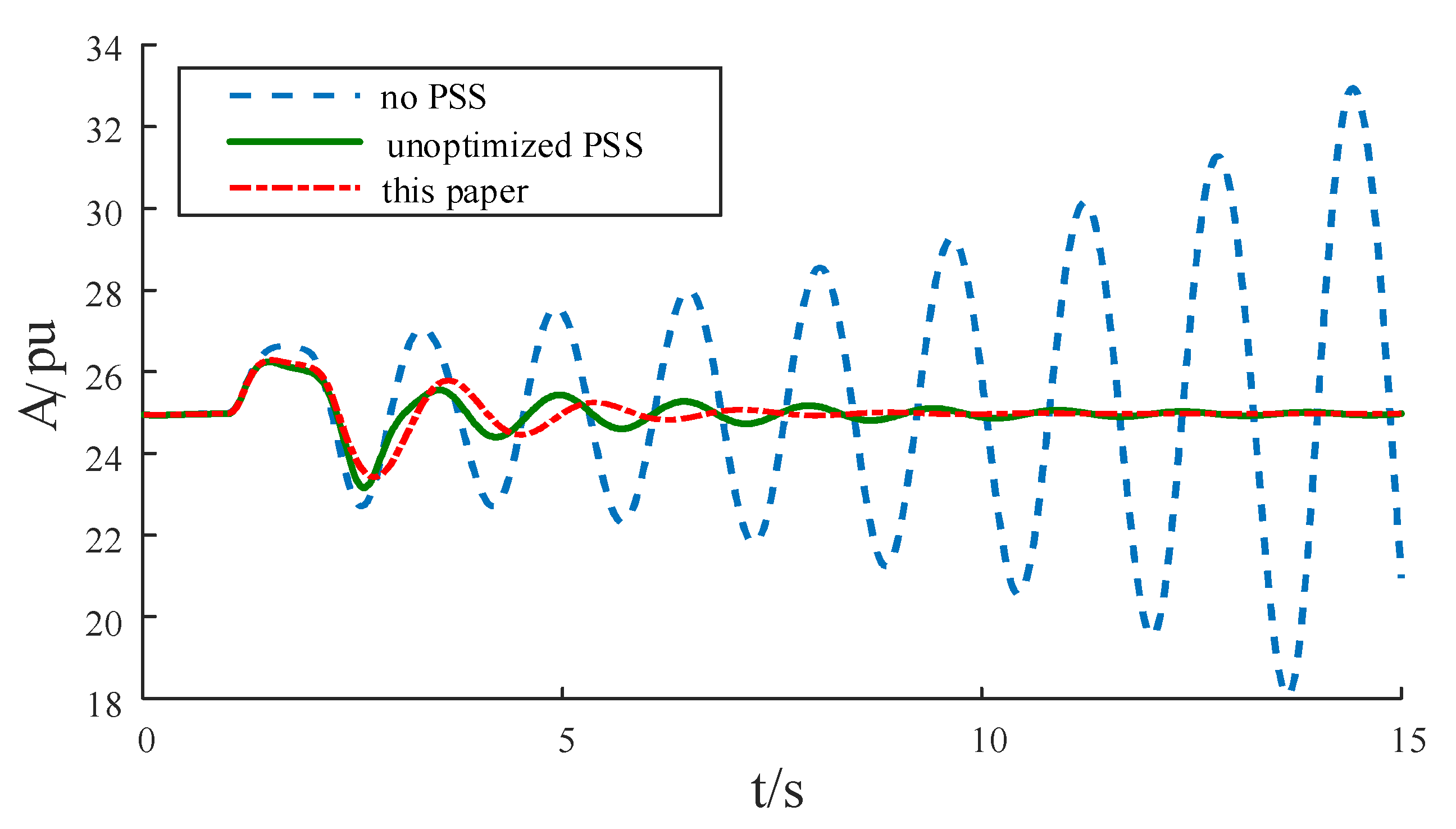
4.2.2. Large Disturbance
5. Conclusions
- (1)
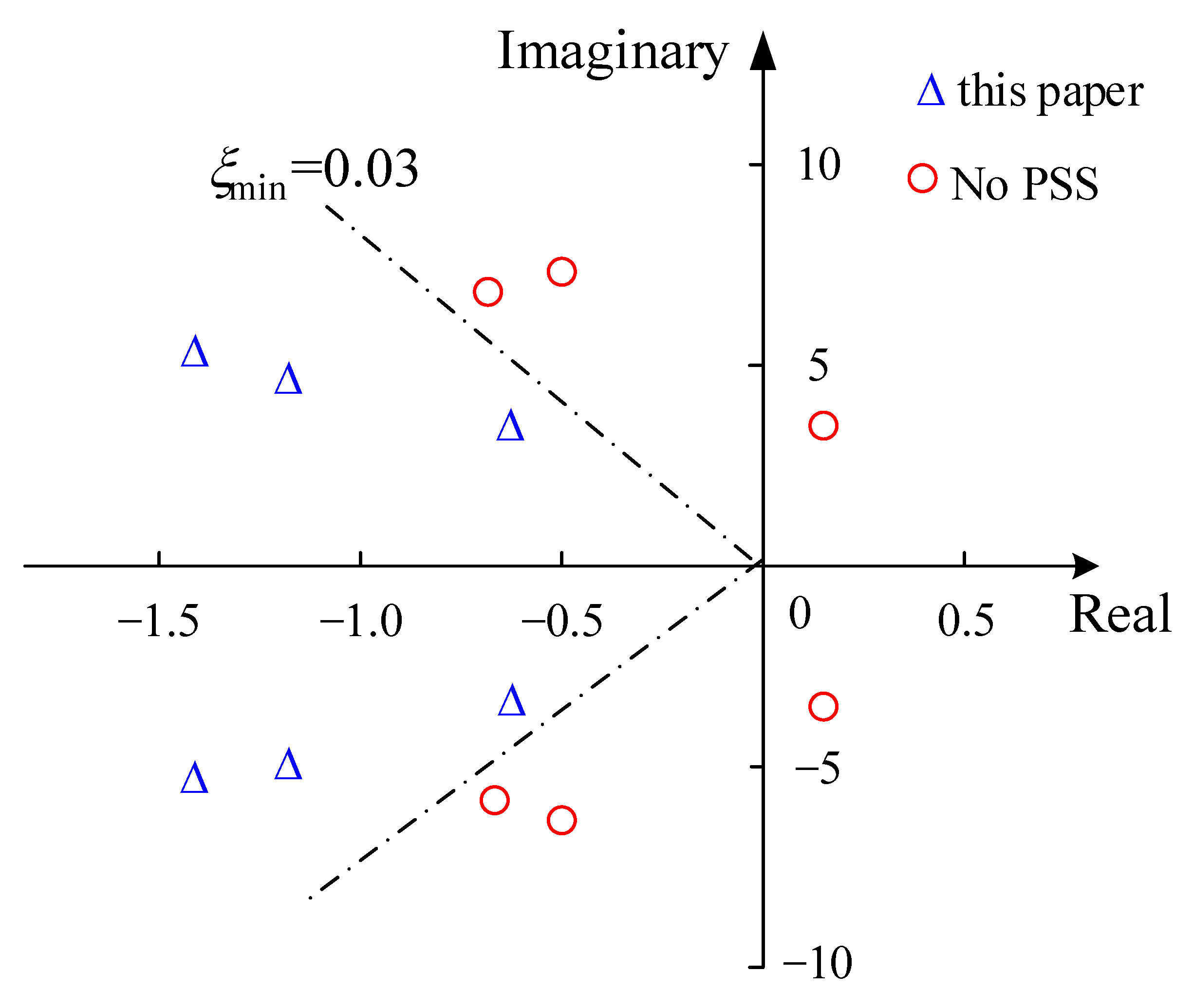
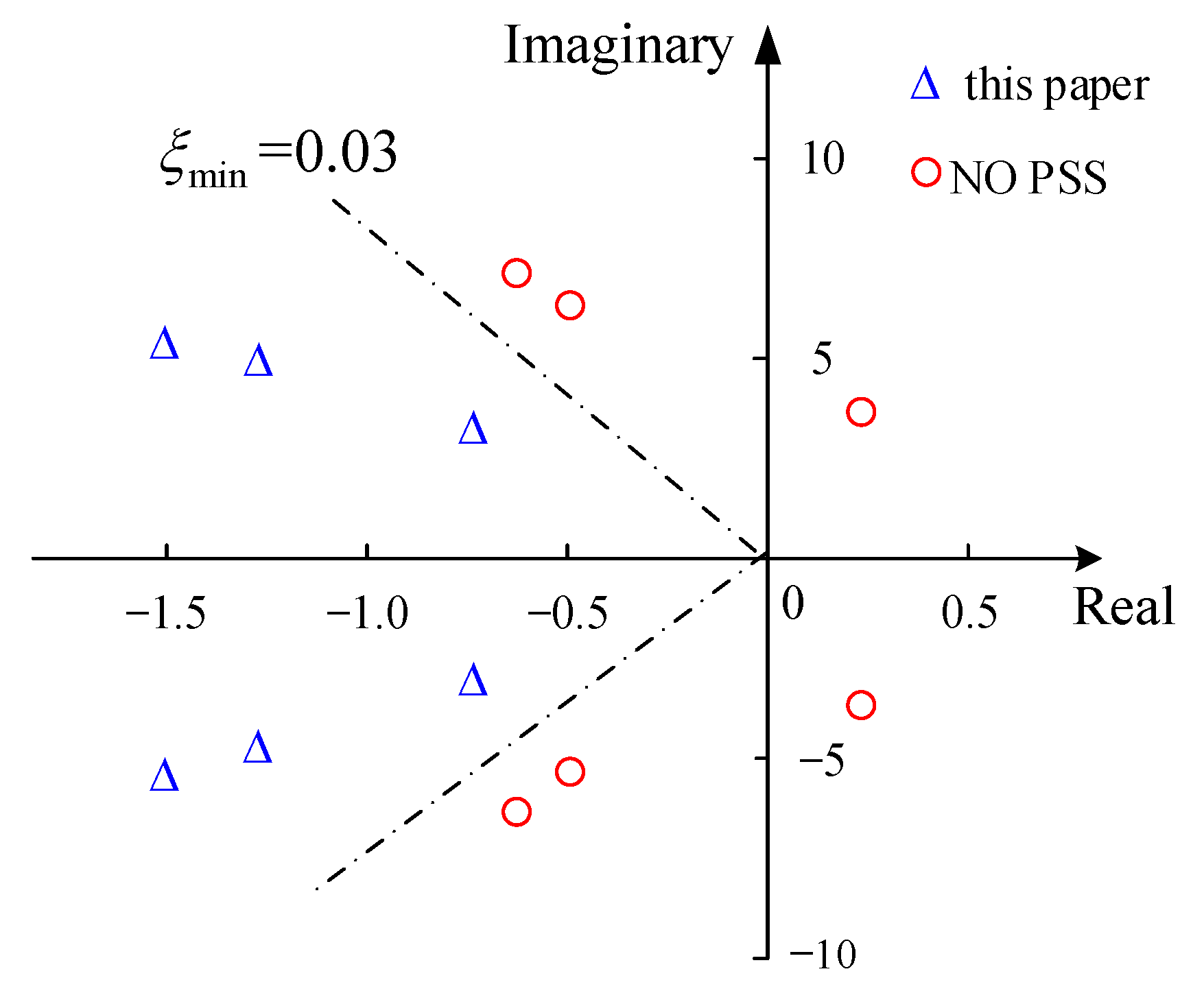
- In the case of system oscillation instability, the installation of the power system stabilizer on the generator can effectively calm the oscillation, so that the system can be restored to normal operation in a specified time. However, the effect of PSS presented under different design methods is also different. Simulations show that using the method in this paper to design the parameters of PSS can convert the negative damping electromechanical mode that threatens the stability of the system to positive damping, and at the same time enhance the damping ratio of other oscillation modes, effectively improving the stability and robustness of the system, regardless of the operation mode of small or large disturbance;
- (2)
- For multiple power system stabilizers in the system, the traditional phase compensation method usually carries out parameter settings sequentially, which will inevitably cause the interaction effect between each stabilizer. This paper uses the performance target based on eigenvalues instead of the traditional phase compensation method to optimize the PSS parameters to achieve more effective suppression of the low-frequency oscillation of the power system;
- (3)
- The SA-QUATRE algorithm proposed in this paper can jump out of the local optimum and has better convergence and accuracy. This algorithm not only overcomes the defect of slow convergence of the particle cluster optimization algorithm, it also has stronger cooperation, reduces time complexity, and accepts inferior solutions with a certain probability to avoid falling into local minimum in the process of searching;
- (4)
- The SA-QUATRE algorithm has good applicability. The applicability of this method to the coordinated design of the damping controller of the flexible AC transmission system is still under study, and it is also worthy of further popularization and application to other fields;
- (5)
- In the future, PSS can be used to suppress the low-frequency oscillation caused by the addition of renewable energy to the traditional power grid and analyze the adaptability of PSS in new power systems.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xu, G.; Fang, Y.; Li, Z.; Wu, X.; Liu, F.; Li, W. Phenomenon and mechanism of interval tie-line power oscillation in ultra-low frequency oscillation. Power Syst. Autom. 2020, 44, 69–82. [Google Scholar]
- Hu, H.; Zhou, Y.; Li, X.; Lei, K. Low-frequency oscillation in electric railway depot: A comprehensive review. IEEE Trans. Power Electron. 2020, 36, 295–314. [Google Scholar] [CrossRef]
- Bai, F.; Wang, B. Influence of photovoltaic grid connection on low-frequency oscillation. J. Sol. Energy 2020, 41, 255–261. [Google Scholar]
- Obaid, Z.A.; Mejeed, R.A.; Al-Mashhadani, A. Investigating the Impact of using Modern Power System Stabilizers on Frequency Stability in Large Dynamic Multi-Machine Power System. In Proceedings of the 2020 55th International Universities Power Engineering Conference (UPEC), Turin, Italy, 1–4 September 2020; pp. 1–6. [Google Scholar]
- Mehrzad, A.; Darmiani, M.; Mousavi, Y.; Shafie-Khah, M.; Aghamohammadi, M. An Efficient Rapid Method for Generators Coherency Identification in Large Power Systems. IEEE Open Access J. Power Energy 2022, 9, 151–160. [Google Scholar] [CrossRef]
- Gude, M.K.; Salma, U. A novel approach of PSS optimal parameter tuning in a multi-area power system using hybrid butterfly optimization algorithm-particle swarm optimization. Int. J. Syst. Assur. Eng. Manag. 2022, 1–10. [Google Scholar] [CrossRef]
- Pan, X.; Zhang, L.; Zhang, W.; Xu, Y.; Bian, H. parameter coordination optimization method of multi-operation mode power system stabilizer based on optimization algorithm of moth-extinguishing. Power Grid Technol. 2020, 44, 3038–3046. [Google Scholar]
- Alzubi, I.; Al-Masri, H.M.K.; Abuelrub, A. Modified Particle Swarm Optimization Algorithms for Solving Economic Load Dispatch. In Proceedings of the 2022 3rd International Conference on Smart Grid and Renewable Energy (SGRE), Doha, Qatar, 20–22 March 2022; pp. 1–5. [Google Scholar]
- H, S.J.; Laly, M.J. Optimal Design of Power System Stabilizer for Damping Low Frequency Oscillations in a Multi-Machine Power System. In Proceedings of the 2020 International Conference on Power Electronics and Renewable Energy Applications (PEREA), Kannur, India, 27–28 November 2020; pp. 1–6. [Google Scholar]
- Rodrigues, F.; Molina, Y.; Silva, C.; Ñaupari, Z. Simultaneous tuning of the AVR and PSS parameters using particle swarm optimization with oscillating exponential decay. Int. J. Electr. Power Energy Syst. 2021, 133, 107215. [Google Scholar] [CrossRef]
- Devarapalli, R.; Bhattacharyya, B. A hybrid modified grey wolf optimization-sine cosine algorithm-based power system stabilizer parameter tuning in a multimachine power system. Optim. Control. Appl. Methods 2020, 41, 1143–1159. [Google Scholar] [CrossRef]
- Gurung, S.; Jurado, F.; Naetiladdanon, S.; Sangswang, A. Comparative analysis of probabilistic and deterministic approach to tune the power system stabilizers using the directional bat algorithm to improve system small-signal stability. Electr. Power Syst. Res. 2020, 181, 106176. [Google Scholar] [CrossRef]
- Meng, Z.; Pan, J.-S.; Xu, H. Quasi-Affine TRansformation Evolutionary (QUATRE) algorithm: A cooperative swarm based algorithm for global optimization. Knowl.-Based Syst. 2016, 97, 104–121. [Google Scholar] [CrossRef]
- Zhao, F.; Guo, C.; Si, J. Research on PSS parameter optimization based on bat algorithm. Control. Eng. 2019, 1, 21–25. [Google Scholar]
- Zhang, C.; Qiu, B. Parameters coordinated optimization design of power system stabilizer by social learning based particle swarm optimization algorithm. Adv. Technol. Electr. Eng. 2022, 41, 24–33. [Google Scholar]
- Li, Q.; Wu, C.; Chen, L.; Duan, R.; Huang, W. Parameter optimization of power system stabilizer for suppressing frequency oscillation. Power Syst. Autom. 2020, 44, 93–99. [Google Scholar]
- Saadatmand, M.; Mozafari, B.; Gharehpetian, G.B.; Soleymani, S. Optimal coordinated tuning of power system stabilizers and wide-area measurement-based fractional-order PID controller of large-scale PV farms for LFO damping in smart grids. Int. Trans. Electr. Energy Syst. 2021, 31, e12612. [Google Scholar] [CrossRef]
- Chen, J.; Jin, T.; Zhu, X.; Li, Z.; Zhang, K. Parameter optimization of power system stabilizer based on SOGWO. Power Syst. Prot. Control. 2020, 48, 159–164. [Google Scholar]
- Sreedivya, K.M.; Jeyanthy, P.A.; Devaraj, D. Improved design of interval type-2 fuzzy based wide area power system stabilizer for inter-area oscillation damping. Microprocess. Microsyst. 2021, 83, 103957. [Google Scholar] [CrossRef]
- Liu, Q. Power System Stability and Generator Excitation Control; China Electric Power Press: Beijing, China, 2007. [Google Scholar]
- Zhenyu, M. Research on QUasi-Affine Transformation Evolutionary Algorithm with Cooperative Structure; Harbin Institute of Technology: Harbin, China, 2018. [Google Scholar]
- Du, W.; Wang, H. The Theory and Method of Power System Low-Frequency Power Oscillation Mode Analysis; Science Press: Beijing, China, 2017. [Google Scholar]
- Chen, J.; Jin, T.; Mohamed, M.A.; Wang, M. An adaptive TLS-ESPRIT algorithm based on an S-G filter for analysis of low frequency oscillation in wide area measurement systems. IEEE Access 2019, 7, 47644–47654. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Functional Expression | Search Area | Optimum Value |
|---|---|---|
| [−100,100] | 0 | |
| [−100,100] | 01 | |
| [−100,100] | 0 | |
| [−100,100] | 0 | |
| [−100,100] | 0 | |
| [−100,100] | 0 | |
| [−100,100] | 0 | |
| [−100,100] | 0 |
| Function | SA-QUATRE | PSO | QUATRE | SA | ||||
|---|---|---|---|---|---|---|---|---|
| Mean Value | Standard Deviation | Mean Value | Standard Deviation | Mean Value | Standard Deviation | Mean Value | Standard Deviation | |
| f1 | 0 | 0 | 0.0012 | 0.0032 | 1.08 × 10−26 | 3.10 × 10−25 | 1.69 × 104 | 262.974 |
| f2 | 0.2961 | 1.2047 | 3.82 × 108 | 8.52 × 108 | 0.3430 | 1.3370 | 2.90 × 1019 | 1.53 × 1019 |
| f3 | 3.09 × 10−7 | 3.05 × 10−7 | 854.782 | 1483.98 | 3.403 × 10−7 | 5.441 × 10−7 | 6.51 × 106 | 3.80 × 106 |
| f4 | 0.0484 | 0.0195 | 1.00 × 106 | 4.01 × 105 | 0.6340 | 0.5477 | 1.17 × 107 | 1.02 × 106 |
| f5 | 2.7424 | 3.7638 | 16.073 | 22.983 | 3.7441 | 4.7638 | 1516.16 | 51.090 |
| f6 | 0.1555 | 0.0886 | 2.8808 | 3.1924 | 0.2010 | 0.1773 | 2.881 × 103 | 74.165 |
| f7 | 20.061 | 0.0777 | 20.323 | 0.0875 | 20.454 | 0.0920 | 20.556 | 0.0880 |
| f8 | 0.7753 | 2.6725 | 48.426 | 22.262 | 0.8890 | 3.5521 | 1.35 × 107 | 3.41 × 106 |
| Mode 1 | Mode 2 | Mode 3 | |
|---|---|---|---|
| characteristic root | 0.1029 ± 4.0251i | −0.6743 ± 7.2483i | −0.6804 ± 7.0347i |
| f/Hz | 0.6409 | 1.1542 | 1.1202 |
| −0.0256 | 0.0926 | 0.0927 |
| Method | G2 | G4 | ||||
|---|---|---|---|---|---|---|
| KS | T1 | T3 | KS | T1 | T3 | |
| PSO | 49.94 | 0.57 | 0.99 | 49.74 | 0.39 | 0.99 |
| SA | 46.05 | 0.81 | 0.96 | 42.26 | 1.00 | 0.58 |
| QUATRE | 42.67 | 0.65 | 0.66 | 38.60 | 0.75 | 0.39 |
| This paper | 49.66 | 0.96 | 0.693 | 49.146 | 0.516 | 0.98 |
| Type | Characteristic Root | Damping Ratio | Minimum Damping Ratio |
|---|---|---|---|
| this paper | −1.6173 ± 5.2151i | 0.2962 | 0.1933 |
| −1.3001 ± 4.9332i | 0.2548 | ||
| −0.7476 ± 3.7957i | 0.1933 | ||
| QUATRE | −1.6761 ± 5.3423i | 0.2994 | 0.1786 |
| −1.4534 ± 4.5378i | 0.3050 | ||
| −0.6497 ± 3.5789i | 0.1786 | ||
| SA | −1.8203 ± 6.3656i | 0.2749 | 0.0671 |
| −0.2659 ± 3.9544i | 0.0671 | ||
| −0.5773 ± 0.8160i | 0.1932 | ||
| PSO | −1.9048 ± 5.6322i | 0.3204 | 0.1350 |
| −1.8905 ± 4.7963i | 0.3667 | ||
| −0.5381 ± 3.9493i | 0.1350 |
| Mode | Not Installed PSS | Damping Ratio | Method of This Article | Damping Ratio |
|---|---|---|---|---|
| Characteristic Root | Characteristic Root | |||
| 1 | 0.1051 ± 4.0277i | −0.0261 | −0.6497 ± 3.5789i | 0.1786 |
| 2 | −0.6683 ± 7.2631i | 0.0916 | −1.6173 ± 5.2152i | 0.2962 |
| 3 | −0.6756 ± 7.0499i | 0.0954 | −1.3001 ± 4.9333i | 0.2548 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, J.; Liu, J.; Zhang, C.; Kuang, Y.; Weng, S. Application of Improved Quasi-Affine Transformation Evolutionary Algorithm in Power System Stabilizer Optimization. Electronics 2022, 11, 2785. https://doi.org/10.3390/electronics11172785
Huang J, Liu J, Zhang C, Kuang Y, Weng S. Application of Improved Quasi-Affine Transformation Evolutionary Algorithm in Power System Stabilizer Optimization. Electronics. 2022; 11(17):2785. https://doi.org/10.3390/electronics11172785
Chicago/Turabian StyleHuang, Jing, Jiajing Liu, Cheng Zhang, Yu Kuang, and Shaowei Weng. 2022. "Application of Improved Quasi-Affine Transformation Evolutionary Algorithm in Power System Stabilizer Optimization" Electronics 11, no. 17: 2785. https://doi.org/10.3390/electronics11172785
APA StyleHuang, J., Liu, J., Zhang, C., Kuang, Y., & Weng, S. (2022). Application of Improved Quasi-Affine Transformation Evolutionary Algorithm in Power System Stabilizer Optimization. Electronics, 11(17), 2785. https://doi.org/10.3390/electronics11172785