
Development of a Low-Cost Portable Cluster for Numerical Weather Prediction


Abstract
:1. Introduction
2. Materials & Methods
2.1. The Original Idea of the Potable NWP System
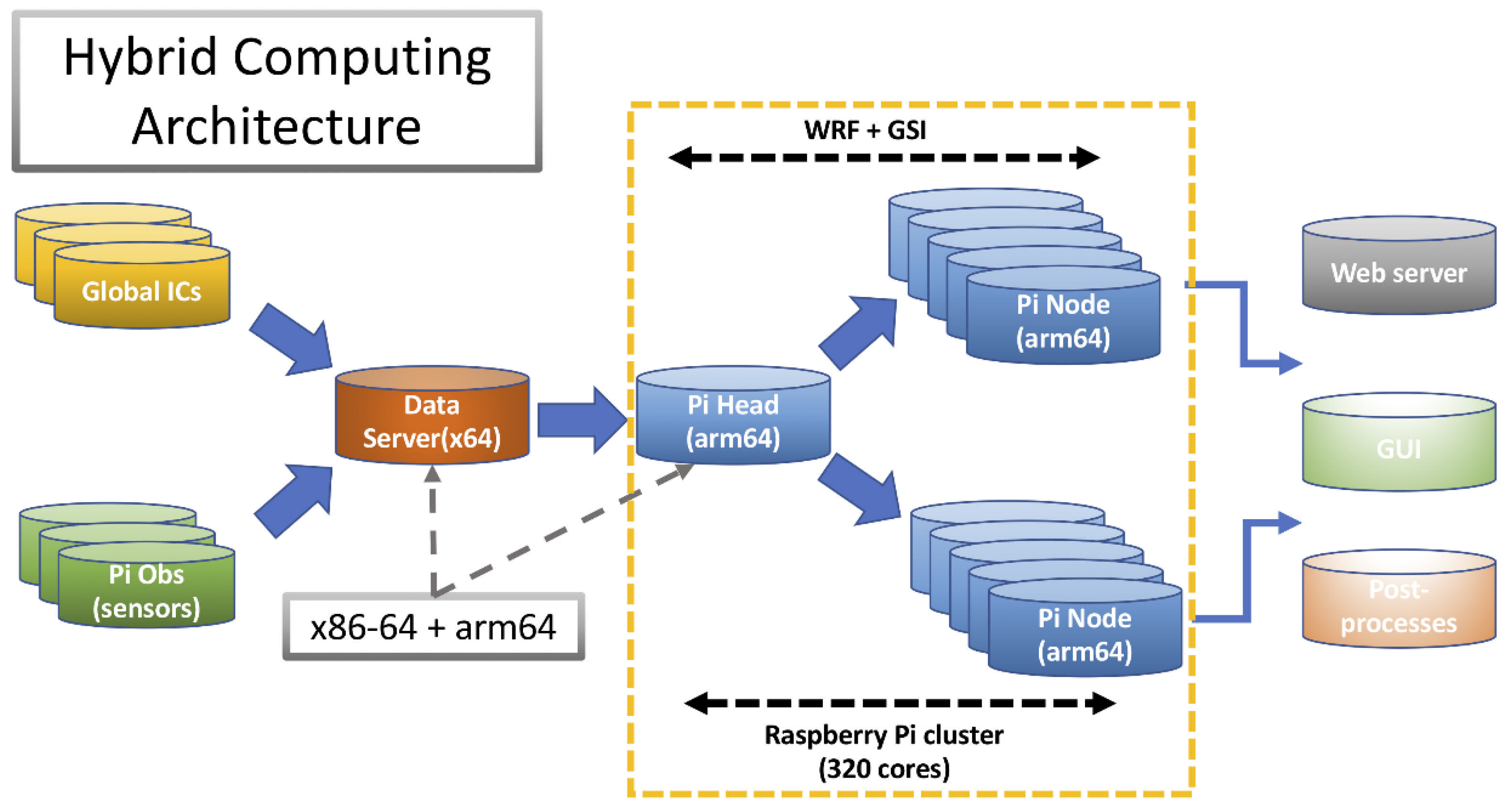
2.2. Hardware Design and Implementation of Potable NWP System
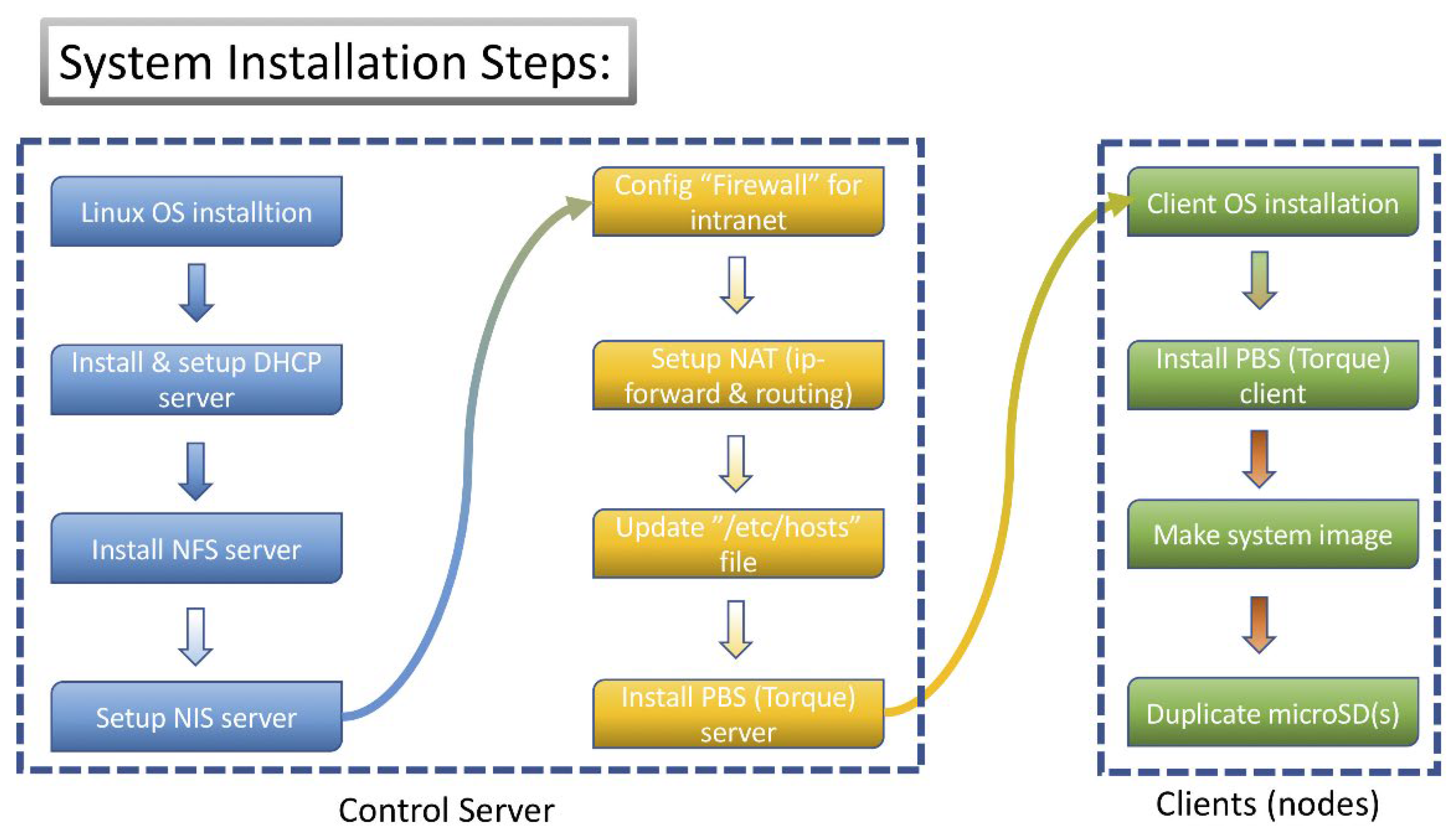
2.3. Software Development and Implementation of Potable NWP System
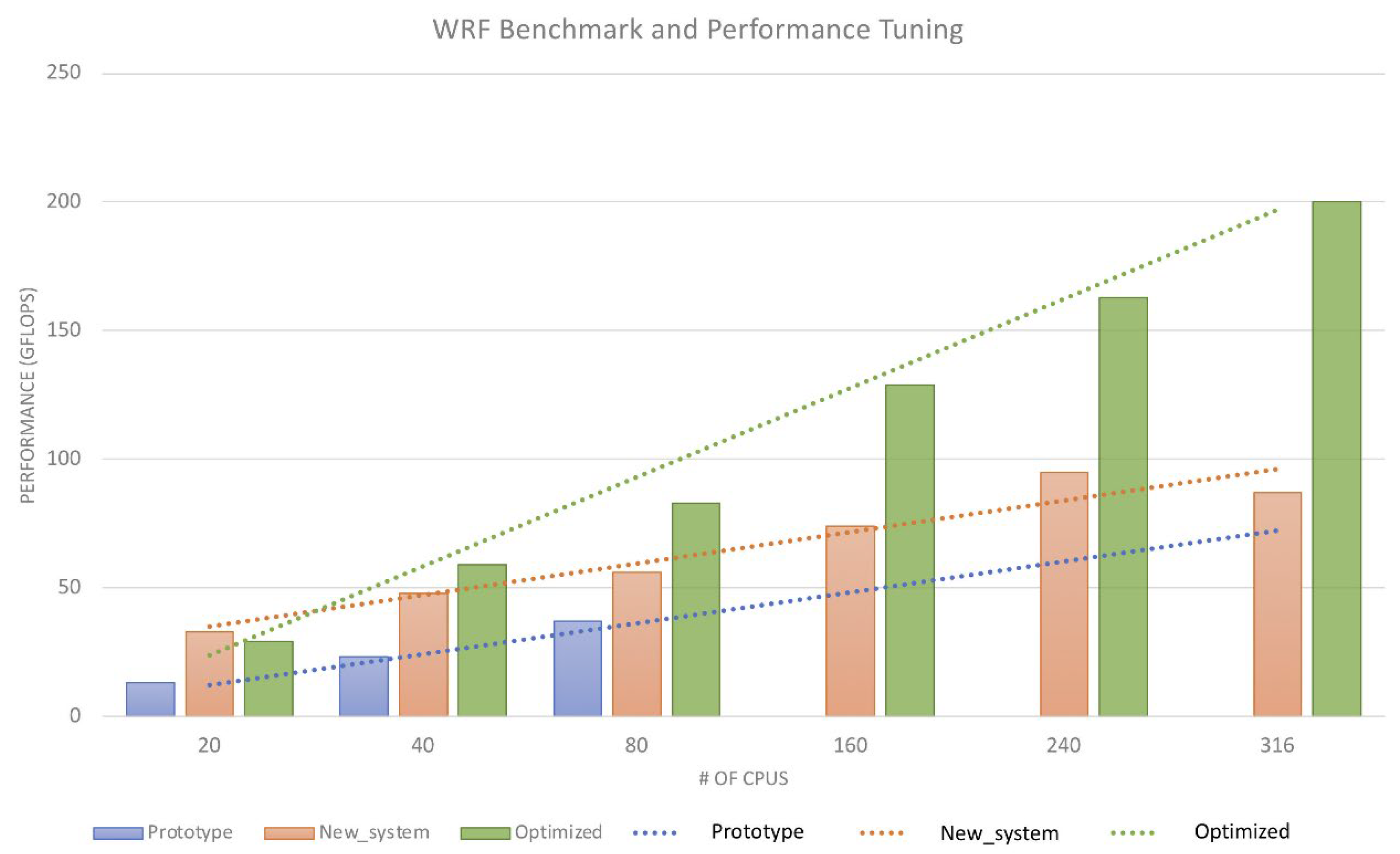
2.4. Strong Scalability
3. Optimization of WRF-GSI Calculation
3.1. WRF Model
3.2. Gridpoint Statistical Interpolation Assimilation System
3.3. System Tuning
4. Results
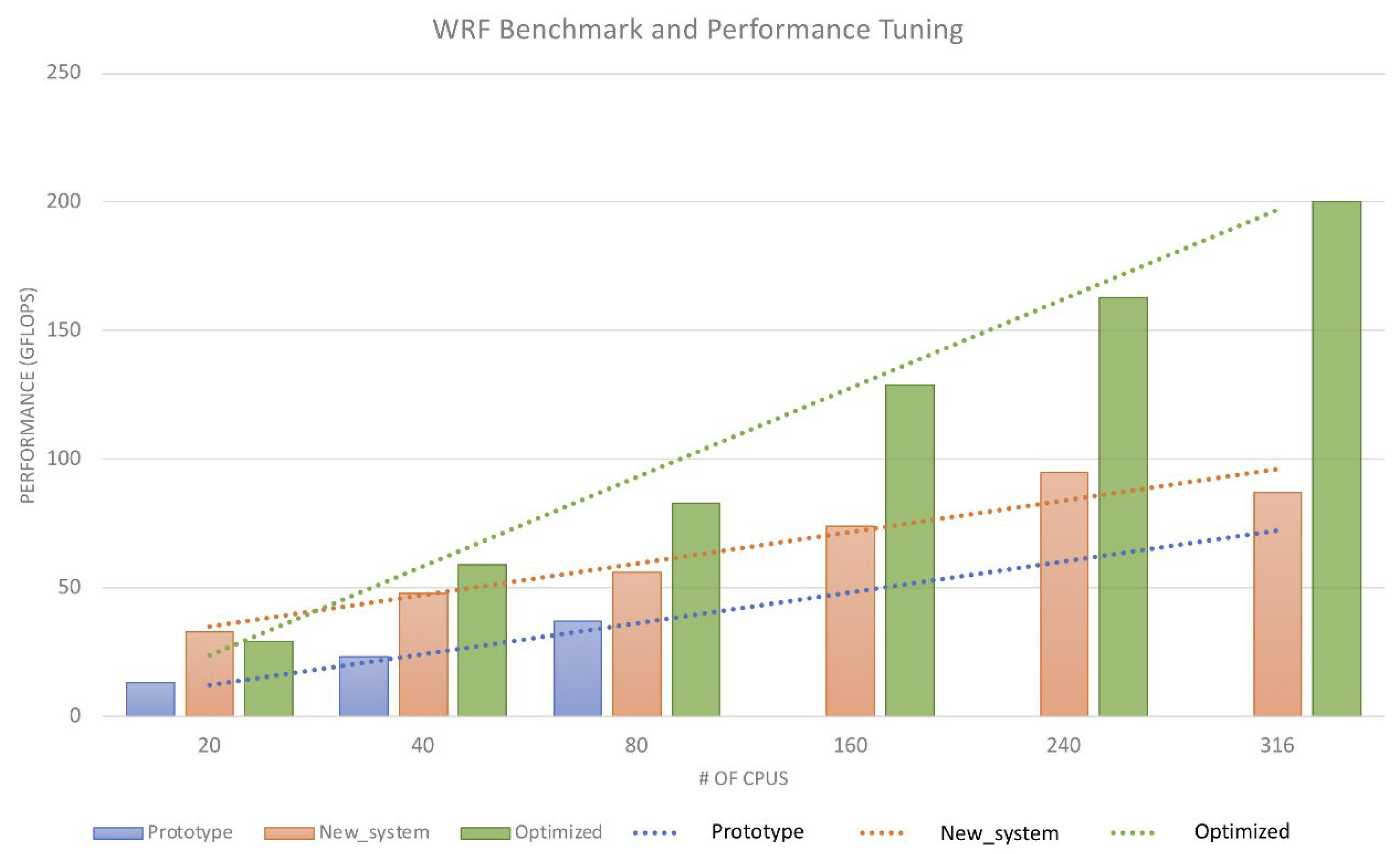
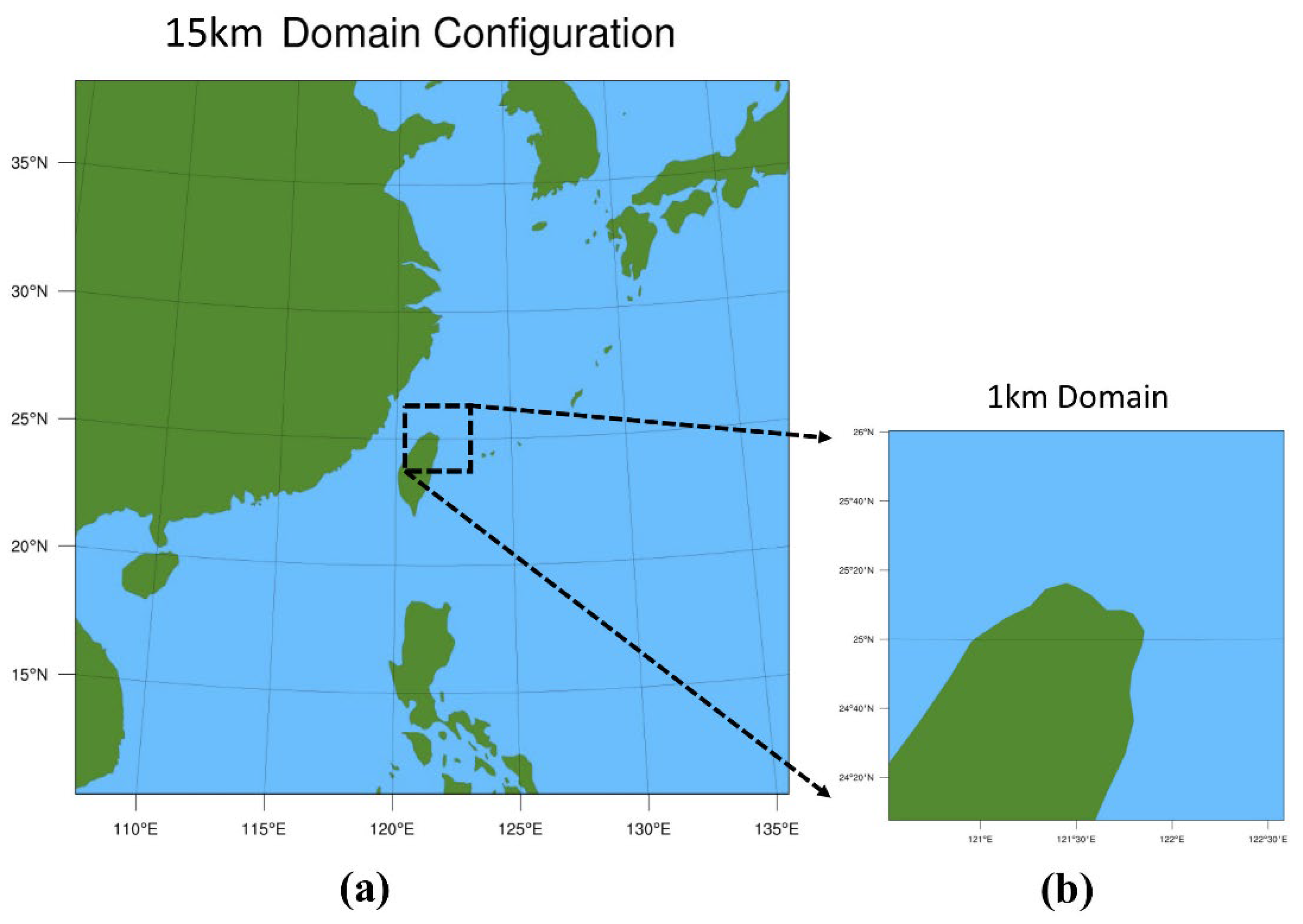
4.1. WRF Performance with 15-km Resolution
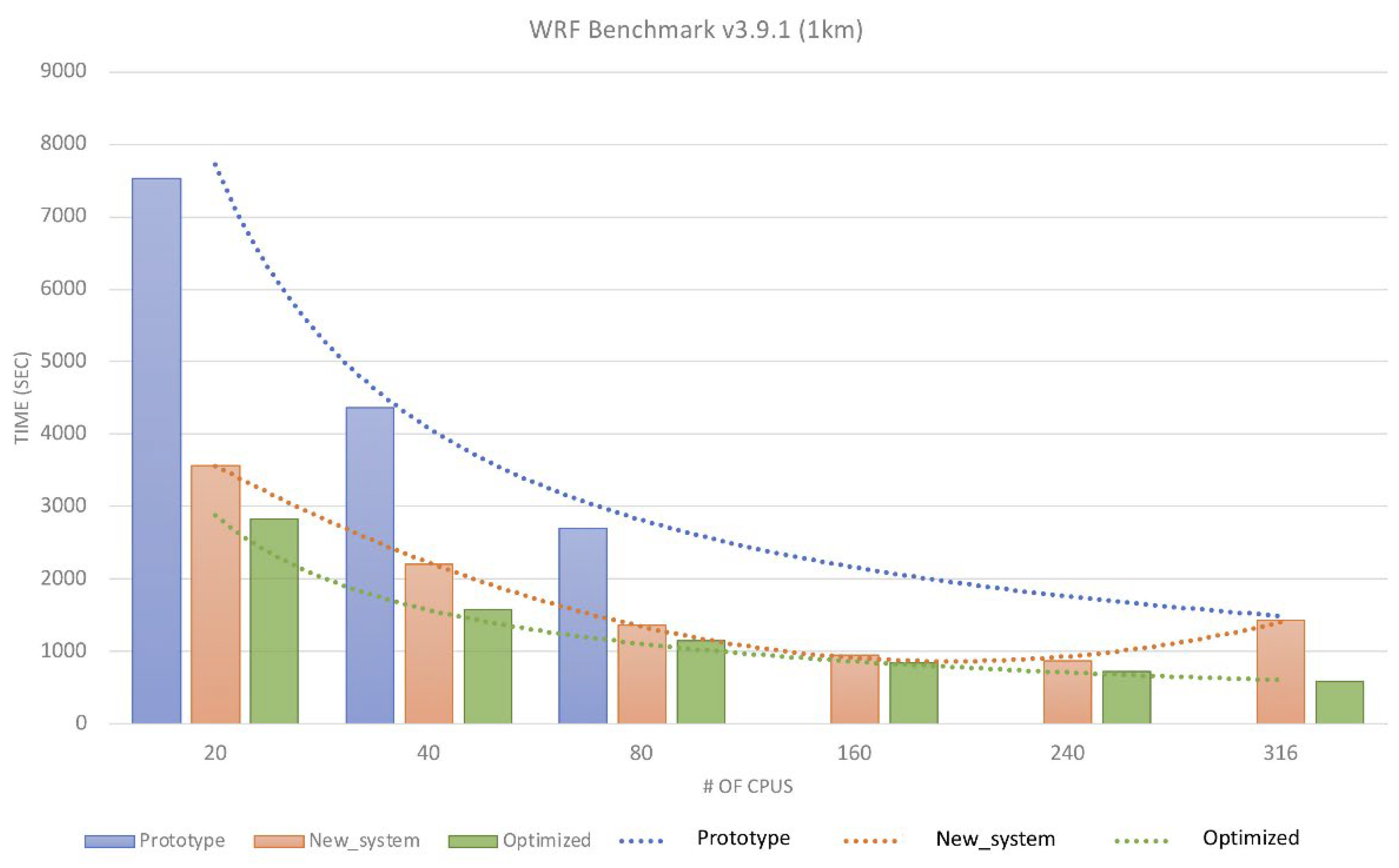
4.2. WRF Performance with 1-km Resolution
4.3. Comparison of the System Specification
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rajovic, N.; Rico, A.; Puzovic, N.; Adeniyi-Jones, C.; Ramírez, A. Tibidabo: Making the case for an ARM-based HPC system. Future Gener. Comput. Syst. 2014, 36, 322–334. [Google Scholar] [CrossRef]
- Schadt, E.; Linderman, M.; Sorenson, J.; Lee, L.; Nolan, G.P. Computational solutions to large-scale data management and analysis. Nat. Rev. Genet. 2010, 11, 647–657. [Google Scholar] [CrossRef] [PubMed]
- Lamport, L.; Lynch, N. Chapter on distributed computing. In Handbook of Theoretical Computer Science; Elsevier: Amsterdam, The Netherlands, 1990; pp. 1157–1199. [Google Scholar]
- Mitrović, D.; Marković, D.; Ranđić, S. Raspberry Pi Module Clustering and Cluster Application Capabilities. In Proceedings of the 7th International Scientific Conference Techniques and Informatics in Education Faculty of Technical Sciences, Čačak, Serbia, 25–27 May 2018; pp. 310–315. Available online: http://www.ftn.kg.ac.rs/konferencije/tie2018/Radovi%20TIE%202018/EN/4)%20Session%203%20-%20Engineering%20Education%20and%20Practice/S310_057.pdf (accessed on 2 January 2022).
- Mantovani, F.; Garcia-Gasulla, M.; Gracia, J.; Stafford, E.; Banchelli, F.; Josep-Fabrego, M.; Criado-Ledesma, J.; Nachtmann, M. Performance and energy consumption of HPC workloads on a cluster based on Arm ThunderX2 CPU. Future Gener. Comput. Syst. 2020, 112, 800–818. [Google Scholar] [CrossRef]
- Weloli, J.W.; Bilavarn, S.; Derradji, S.; Belleudy, C.; Lesmanne, S. Efficiency Modeling and Analysis of 64-bit ARM Clusters for HPC. In Proceedings of the 2016 Euromicro Conference on Digital System Design (DSD), Limassol, Cyprus, 31 August–2 September 2016; pp. 342–347. [Google Scholar] [CrossRef]
- Aldana, M.J.; Buitrago, J.A.; Gutiérrez, J.E. Evaluation of clusters based on systems on a chip for high-performance computing: A review. Rev. Ingenierías Univ. Medellín 2019, 19, 75–92. [Google Scholar] [CrossRef]
- Nugroho, S.; Widiyanto, A. Designing parallel computing using raspberry pi clusters for IoT servers on apache Hadoop. J. Phys. Conf. Ser. 2020, 1517, 012070. [Google Scholar] [CrossRef]
- Hadiwandra, T.Y.; Candra, F. High availability server using raspberry Pi 4 cluster and docker swarm. IT J. Res. Dev. 2021, 6, 43–51. [Google Scholar] [CrossRef]
- Gupta, N.; Brandt, S.R.; Wagle, B.; Wu, N.; Kheirkhahan, A.; Diehl, P.; Baumann, F.W.; Kaiser, H. Deploying a Task-based Runtime System on Raspberry Pi Clusters. In Proceedings of the 2020 IEEE/ACM Fifth International Workshop on Extreme Scale Programming Models and Middleware (ESPM2), Atlanta, GA, USA, 11 November 2020; pp. 11–20. [Google Scholar] [CrossRef]
- Myint, K.N.; Zaw, M.H.; Aung, W.T. Parallel and distributed computing using MPI on raspberry Pi cluster. Int. J. Future Comput. Commun. 2020, 9, 18–22. [Google Scholar] [CrossRef]
- Van Hai, P. Performance analysis of the supercomputer based on raspberry Pi nodes. J. Mil. Sci. Technol. 2021, 72A, 76–86. [Google Scholar]
- Saffran, J.; Garcia, G.; Souza, M.A.; Penna, P.H.; Castro, M.; Góes, L.F.; Freitas, H.C. A low-cost energy-efficient raspberry Pi cluster for data mining algorithms. In Euro-Par 2016: Parallel Processing Workshops. Euro-Par 2016; Lecture Notes in Computer Science; Desprez, F., Ed.; Springer: Cham, Switzerland, 2017; Volume 10104. [Google Scholar] [CrossRef] [Green Version]
- Marković, D.; Vujičić, D.; Mitrović, D.; Ranđić, S. Image processing on raspberry Pi cluster. Int. J. Electr. Eng. Comput. 2018, 2, 83–90. [Google Scholar] [CrossRef]
- Papakyriakou, D.; Kottou, D.; Kostouros, I. Benchmarking raspberry Pi 2 Beowulf cluster. Int. J. Comput. Appl. 2018, 179, 21–27. [Google Scholar] [CrossRef]
- Trott, C.D.; Sample McMeeking, L.B.; Bowker, C.L.; Boyd, K.J. Exploring the long-term academic and career impacts of undergraduate research in geoscience: A case study. J. Geosci. Educ. 2020, 68, 65–79. [Google Scholar] [CrossRef]
- Mackin, K.J.; Cook-Smith, N.; Illari, L.; Marshall, J.; Sadler, P. The effectiveness of rotating tank experiments in teaching undergraduate courses in atmospheres, oceans, and climate sciences. J. Geosci. Educ. 2012, 60, 67–82. [Google Scholar] [CrossRef]
- Dabney, K.P.; Tai, R.H.; Almarode, J.T.; Miller-Friedmann, J.L.; Sonnert, G.; Sadler, P.M.; Hazari, Z. Out-of-school time science activities and their association with career interest in stem. Int. J. Sci. Educ. 2012, 2, 63–79. [Google Scholar] [CrossRef]
- Sadler, P.M.; Sonnert, G.; Hazari, Z.; Tai, R. The role of advanced high school coursework in increasing STEM career interest. Sci. Educ. 2014, 23, 1–13. [Google Scholar]
- Foust, W.E. An informal introduction to numerical weather models with low-cost hardware. Bull. Am. Meteorol. Soc. 2022, 103, E17–E24. [Google Scholar] [CrossRef]
- Shewale, S.D.; Gaikwad, S.N. An IoT based real-time weather monitoring system using raspberry Pi. Int. Res. J. Eng. Technol. 2017, 4, 3313–3316. [Google Scholar]
- Patel, A.; Verma, A. IOT based facial recognition door access control home security system. Int. J. Comput. Appl. 2017, 172, 11–17. [Google Scholar] [CrossRef]
- Kaur, A.; Jasuja, A. Health monitoring based on IoT using Raspberry PI. In Proceedings of the IEEE International Conference on Computing, Communication and Automation (ICCCA), Greater Noida, India, 5–6 May 2017; pp. 1335–1340. [Google Scholar]
- Joshi, J.; Rajapriya, V.; Rahul, S.R.; Kumar, P.; Polepally, S.; Samineni, R.; Tej, D.K. Performance Enhancement and IoT Based Monitoring for Smart Home. In Proceedings of the International Conference on Information Networking, Da Nang, Vietnam, 11–13 January 2017; pp. 468–473. [Google Scholar]
- Sajjad, M.; Nasir, M.; Muhammad, K.; Khan, S.; Jan, Z.; Sangaiah, A.K.; Elhoseny, M.; Baik, S.W. Raspberry Pi assisted face recognition framework for enhanced law-enforcement services in smart cities. Future Gener. Comput. Syst. 2017, 108, 995–1007. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, Y. The Detection and Recognition of Bridges’ Cracks Based on Deep Belief Network. In Proceedings of the IEEE International Conference on Computational Science and Engineering (CSE) and IEEE International Conference on Embedded and Ubiquitous Computing (EUC), Guangzhou, China, 22–23 July 2017; IEEE: Piscataway, NJ, USA, 2017; Volume 1, pp. 768–771. [Google Scholar] [CrossRef]
- Wani, H.; Ashtankar, N. An Appropriate Model Predicting Pest/Diseases of Crops Using Machine Learning Algorithms. In Proceedings of the IEEE International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 6–7 January 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–4. [Google Scholar]
- Xu, Z.; Pu, F.; Fang, X.; Fu, J. Raspberry pi based intelligent wireless sensor node for localized torrential rain monitoring. J. Sens. 2016, 2016, 4178079. [Google Scholar] [CrossRef] [Green Version]
- John, N.; Surya, R.; Ashwini, R.; Kumar, S.S.; Soman, K. A low cost implementation of multi-label classification algorithm using mathematica on raspberry Pi. Procedia Comput. Sci. 2015, 46, 306–313. [Google Scholar] [CrossRef]
- Moon, S.; Min, M.; Nam, J.; Park, J.; Lee, D.; Kim, D. Drowsy driving warning system based on gs1 standards with machine learning. In Proceedings of the IEEE International Congress on Big Data (BigData Congress), Honolulu, HI, USA, 25–30 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 289–296. [Google Scholar] [CrossRef]
- Tripathy, R.; Daschoudhury, R. Real-time face detection and tracking using haar classifier on soc. Int. J. Electr. Comput. Eng. 2014, 3, 175–184. [Google Scholar]
- Senthilkumar, G.; Gopalakrishnan, K.; Kumar, V.S. Embedded image capturing system using raspberry pi system. Int. J. Emerg. Trends Technol. Comput. Sci. 2014, 3, 213–215. [Google Scholar]
- Baby, C.J.; Singh, H.; Srivastava, A.; Dhawan, R.; Mahalakshmi, P. Smart bin: An Intelligent Waste Alert and Prediction System Using Machine Learning Approach. In Proceedings of the IEEE International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, India, 22–24 March 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 771–774. [Google Scholar] [CrossRef]
- Zidek, K.; Pitel’, J.; Hošovský, A. Machine Learning Algorithms Implementation into Embedded Systems with Web Application User Interface. In Proceedings of the IEEE International Conference on Intelligent Engineering Systems (INES), Larnaca, Cyprus, 20–23 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 000077–000082. [Google Scholar] [CrossRef]
- Tabbakha, N.E.; Tan, W.H.; Ooi, C.P. Indoor Location and Motion Tracking System for Elderly Assisted Living Home. In Proceedings of the IEEE International Conference on Robotics, Automation and Sciences (ICORAS), Melaka, Malaysia, 27–29 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Sarangdhar, A.A.; Pawar, V. Machine learning regression technique for cotton leaf disease detection and controlling using IoT. In Proceedings of the IEEE International Conference of Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 20–22 April 2017; IEEE: Piscataway, NJ, USA, 2017; Volume 2, pp. 449–454. [Google Scholar] [CrossRef]
- Pu, Z.; Kalnay, E. Numerical Weather Prediction Basics: Models, Numerical Methods, and Data Assimilation. In Handbook of Hydrometeorological Ensemble Forecasting; Duan, Q., Pappenberger, F., Thielen, J., Wood, A., Cloke, H., Schaake, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar] [CrossRef]
- Tang, W.; Chan, P.W.; Haller, G. Lagrangian coherent structure analysis of terminal winds detected by lidar. Part I: Turbulence structures. J. Appl. Meteorol. Clim. 2011, 50, 325–338. [Google Scholar] [CrossRef]
- Zhang, L.; Pu, Z. Four-dimensional assimilation of multitime wind profiles over a single station and numerical simulation of a mesoscale convective system observed during IHOP_2002. Mon. Weather Rev. 2011, 139, 3369–3388. [Google Scholar] [CrossRef]
- Huang, X.Y.; Xiao, Q.; Barker, D.M.; Zhang, X.; Michalakes, J.; Huang, W.; Henderson, T.; Bray, J.; Chen, Y.; Ma, Z.; et al. Four-dimensional variational data assimilation for WRF: Formulation and preliminary results. Mon. Weather Rev. 2009, 137, 299–314. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Shao, A.; Zhang, K.; Ding, N.; Chan, P.-W. Low-level wind shear characteristics and lidar-based alerting at Lanzhou Zhongchuan International Airport, China. J. Meteorol. Res. 2020, 34, 633–645. [Google Scholar] [CrossRef]
- Skamarock, W.C.; Klemp, J.B.; Dudhia, J.; Gill, D.O.; Barker, D.M.; Duda, M.G.; Huang, X.Y.; Wang, W.; Powers, J.G. A Description of the Advanced Research WRF Version 3; NCAR Technical Notes NCAR/TN-475+STR: Boulder, CO, USA, 2008; p. 113. [Google Scholar] [CrossRef]
- Tao, W.K.; Simpson, J.; McCumber, M. An ice–water saturation adjustment. Mon. Weather Rev. 1989, 117, 231–235. [Google Scholar] [CrossRef]
- Tao, W.K.; Wu, D.; Lang, S.; Chern, J.D.; Peters-Lidard, C.; Fridlind, A.; Matsui, T. High-resolution NU-WRF simulations of a deep convective-precipitation system during MC3E: Further improvements and comparisons between Goddard microphysics schemes and observations. J. Geophys. Res. Atmos. 2016, 121, 1278–1305. [Google Scholar] [CrossRef]
- Iacono, M.J.; Delamere, J.S.; Mlawer, E.J.; Shephard, M.W.; Clough, S.A.; Collins, W.D. Radiative forcing by long–lived greenhouse gases: Calculations with the AER radiative transfer models. J. Geophys. Res. 2008, 113, D13103. [Google Scholar] [CrossRef]
- Nakanishi, M.; Niino, H. An improved Mellor–Yamada level 3 model: Its numerical stability and application to a regional prediction of advection fog. Bound. Layer Meteorol. 2006, 119, 397–407. [Google Scholar] [CrossRef]
- Nakanishi, M.; Niino, H. Development of an improved turbulence closure model for the atmospheric boundary layer. J. Meteorol. Soc. Jpn. 2009, 87, 895–912. [Google Scholar] [CrossRef]
- Pleim, J.E.; Xiu, A. Development and testing of a surface flux and planetary boundary layer model for application in mesoscale models. J. Appl. Meteorol. 1995, 34, 16–32. [Google Scholar] [CrossRef]
- Pleim, J.E.; Xiu, A. Development of a land surface model. Part II: Data assimilation. J. Appl. Meteorol. 2003, 42, 1811–1822. [Google Scholar] [CrossRef]
- Kleist, D.T.; Parrish, D.F.; Derber, J.C.; Treadon, R.; Wu, W.S.; Lord, S. Introduction of the GSI into the NCEP global data assimilation system. Weather Forecast. 2009, 24, 1691–1705. [Google Scholar] [CrossRef] [Green Version]
- Cooperman, A.; Dam, C.P.; Zack, J.; Chen, S.-H.; MacDonald, C. Improving Short-Term Wind Power Forecasting through Measurements and Modeling of the Tehachapi Wind Resource Area; California Energy Commission: California, CA, USA, 2018. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Specification | Length × Width × Height (cm) | Weight (kg) | Price (USD) | Power Consumption (W) | ||
|---|---|---|---|---|---|---|
| Computing system | Standby Mode | Full Load | ||||
| Pi cluster (160 cores, 8U) | 10 × 43 × 36 | ~14 | ~7000 | 188.3 | 232.6 | |
| Prototype (84 cores) | 20 × 20 × 15 | <1 | ~1000 | 90 | 130.5 | |
| Conventional HPC (160 cores, 20U) | 38 × 43 × 90 | ~180 | ~24,000 | ~3340 | ~4500 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.-Y.; Yeh, N.-C.; Chuang, Y.-C.; Lin, C.-Y. Development of a Low-Cost Portable Cluster for Numerical Weather Prediction. Electronics 2022, 11, 2769. https://doi.org/10.3390/electronics11172769
Chen C-Y, Yeh N-C, Chuang Y-C, Lin C-Y. Development of a Low-Cost Portable Cluster for Numerical Weather Prediction. Electronics. 2022; 11(17):2769. https://doi.org/10.3390/electronics11172769
Chicago/Turabian StyleChen, Chih-Ying, Nan-Ching Yeh, Yao-Chung Chuang, and Chuan-Yao Lin. 2022. "Development of a Low-Cost Portable Cluster for Numerical Weather Prediction" Electronics 11, no. 17: 2769. https://doi.org/10.3390/electronics11172769
APA StyleChen, C.-Y., Yeh, N.-C., Chuang, Y.-C., & Lin, C.-Y. (2022). Development of a Low-Cost Portable Cluster for Numerical Weather Prediction. Electronics, 11(17), 2769. https://doi.org/10.3390/electronics11172769