
Path Loss Prediction in Tropical Regions using Machine Learning Techniques: A Case Study


Abstract
:1. Introduction
1.1. Incitation and Motivation
1.2. Literature Review
1.3. Contributions
- (a)
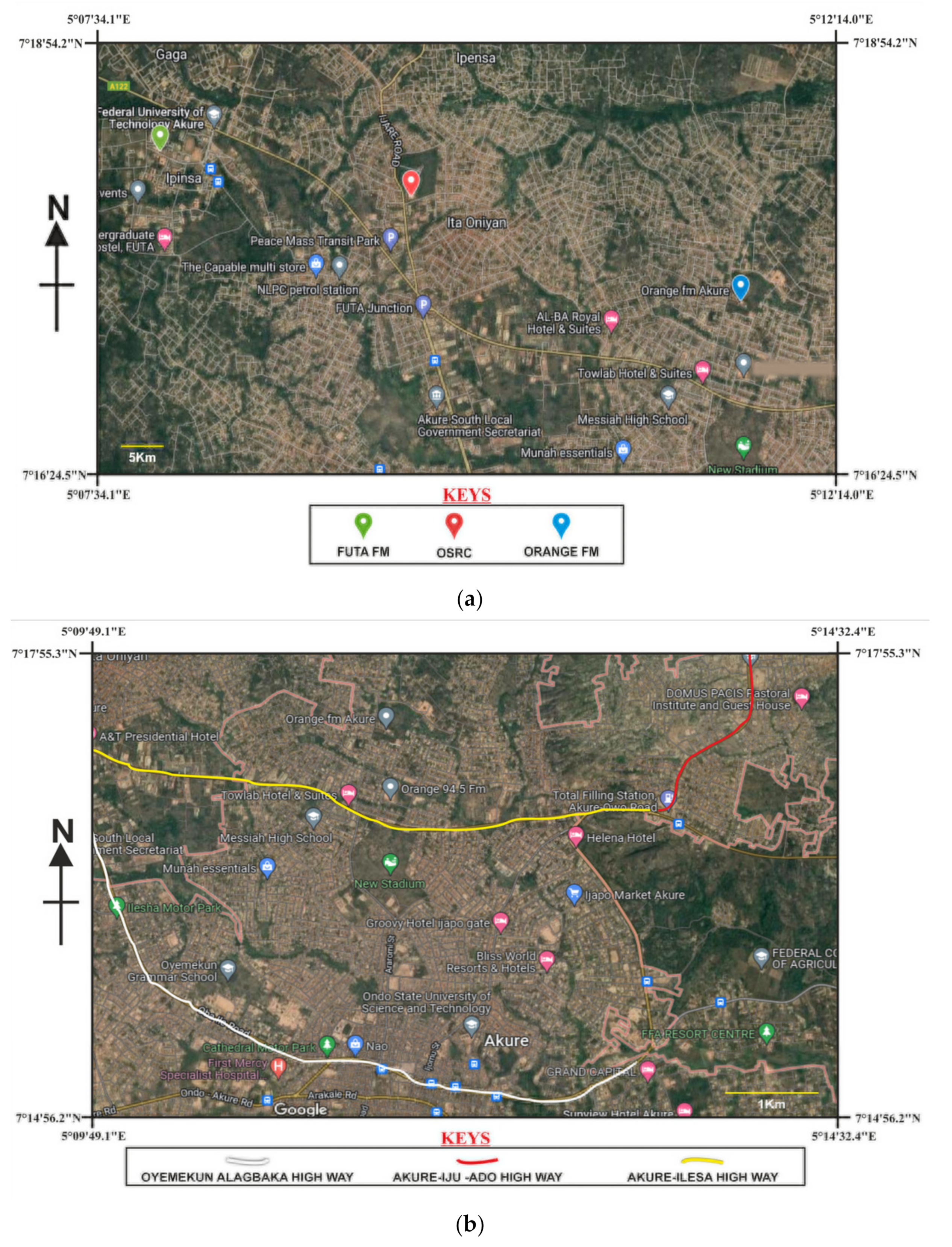
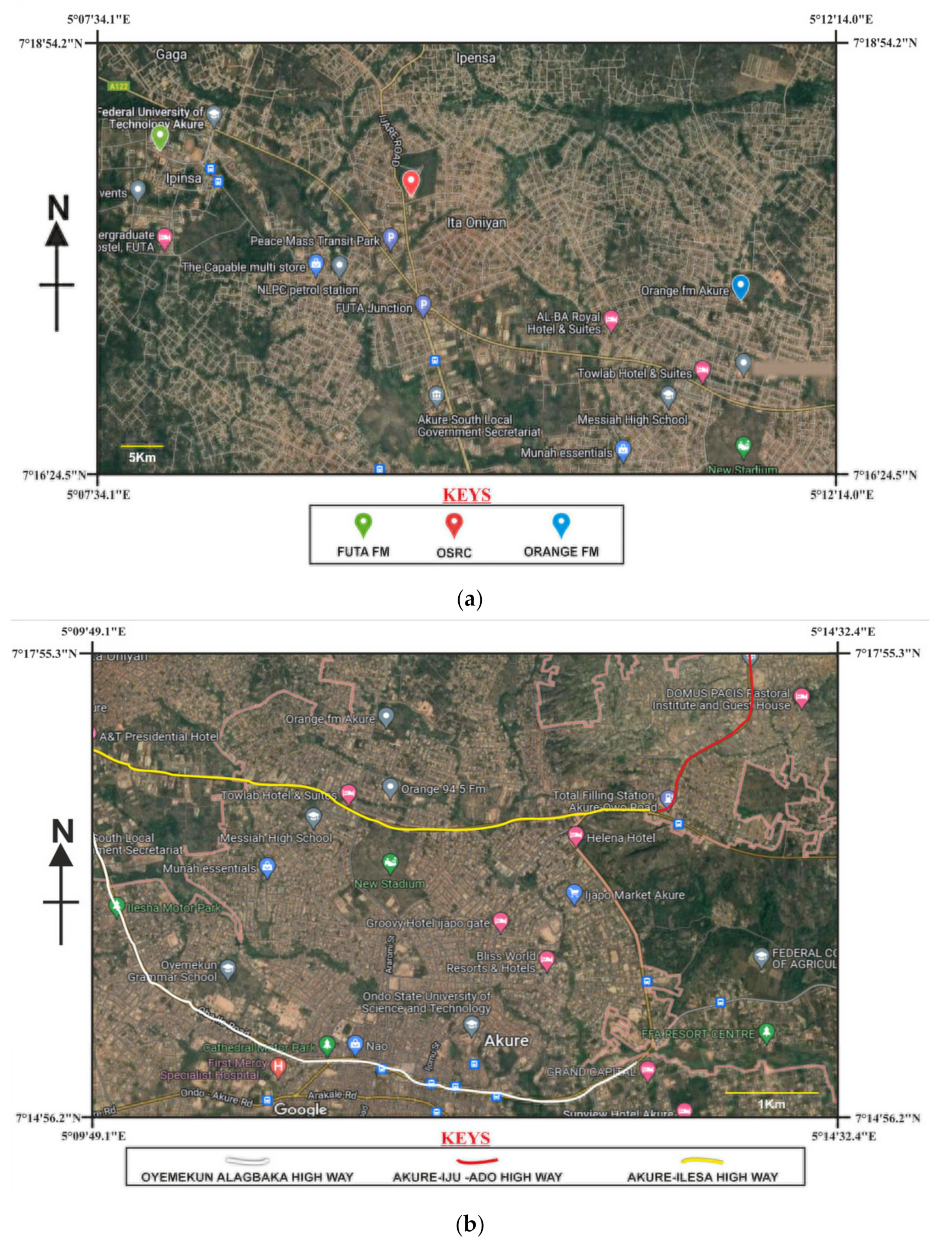
- Experimental field strength measurement campaign was conducted in a tropical region with particular reference to three different broadcasting stations (Ondo State Radio Corporation (OSRC), Orange FM, and FUTA FM) in Akure metropolis, Nigeria.
- (b)
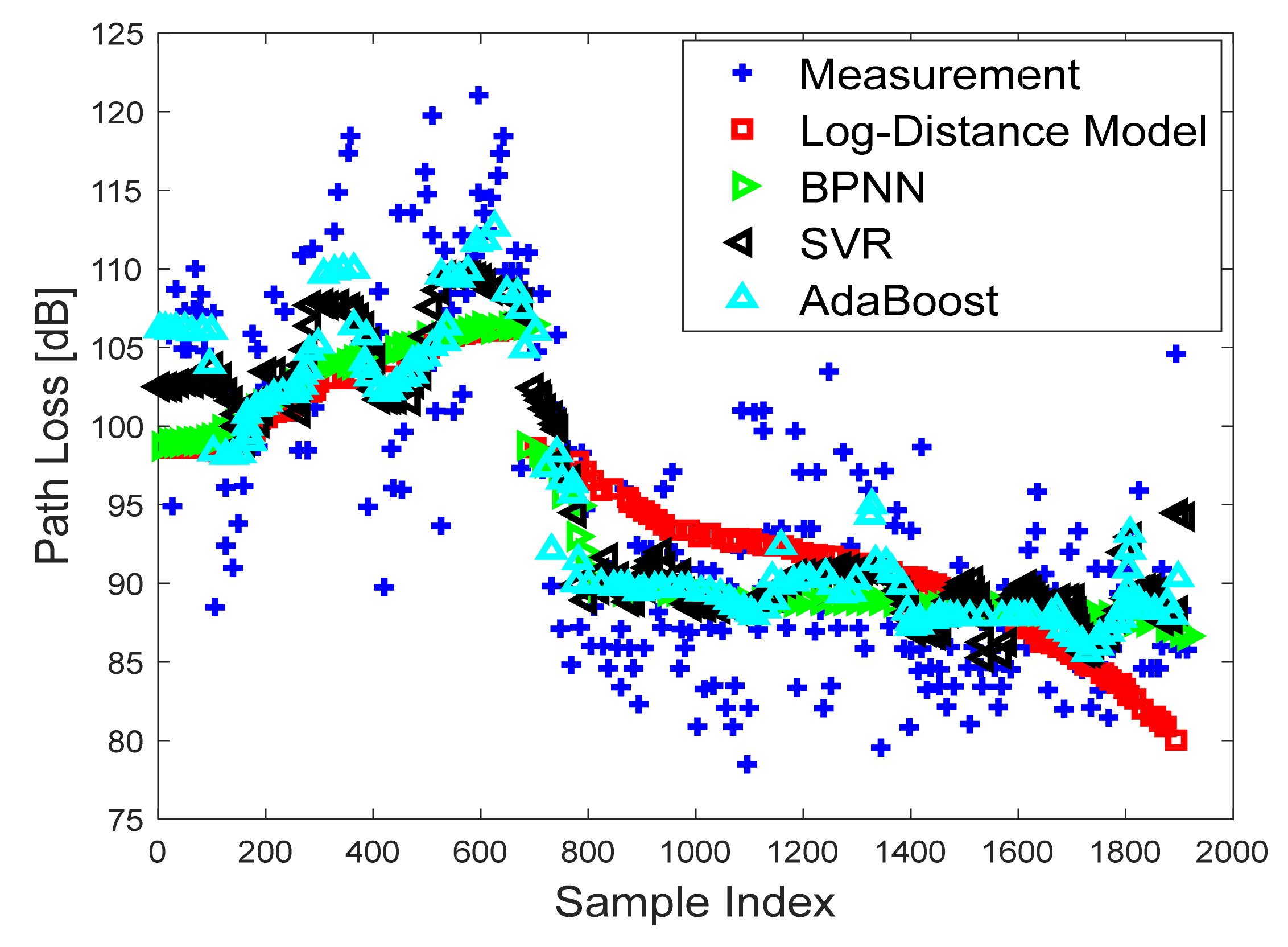
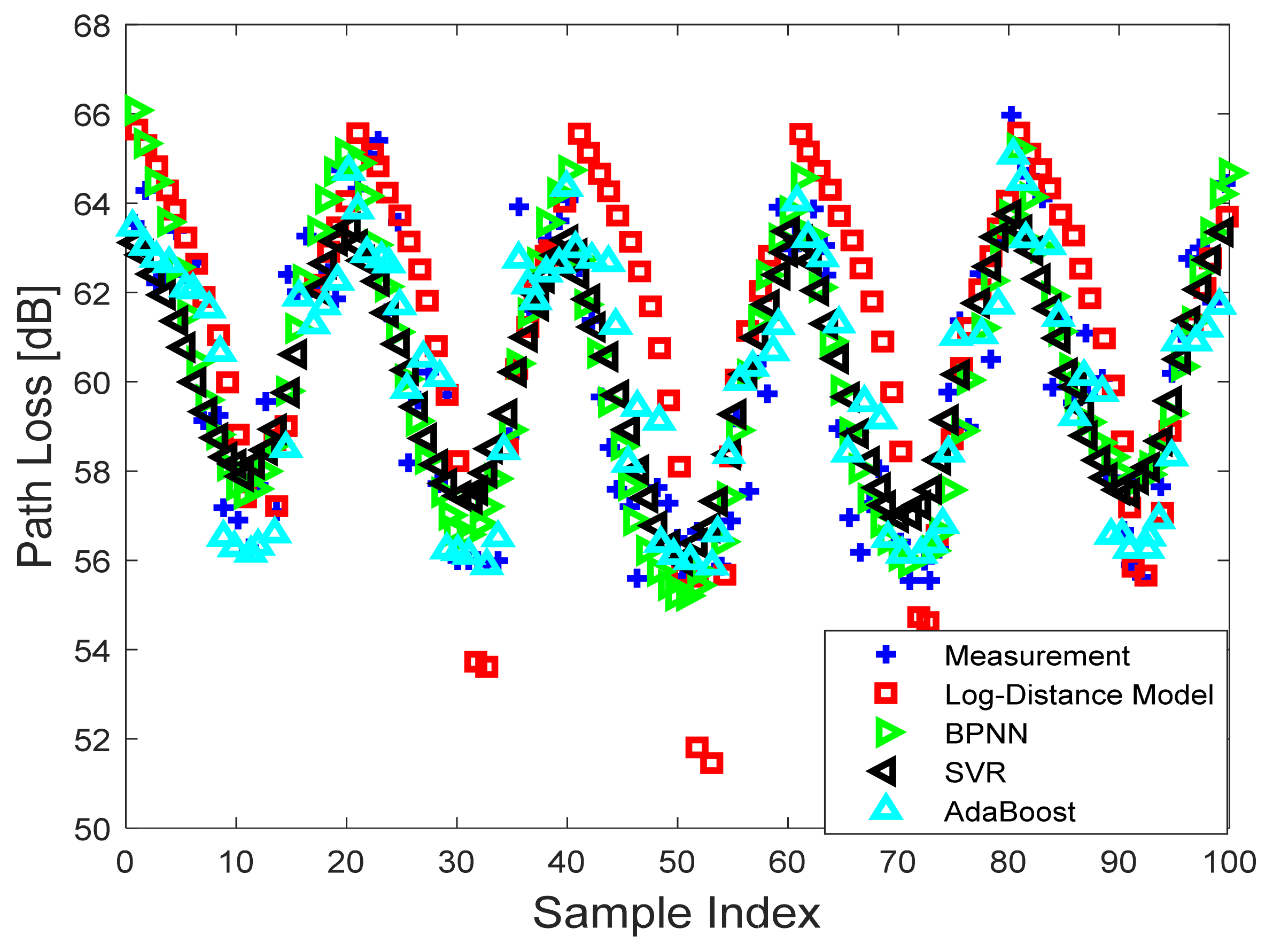
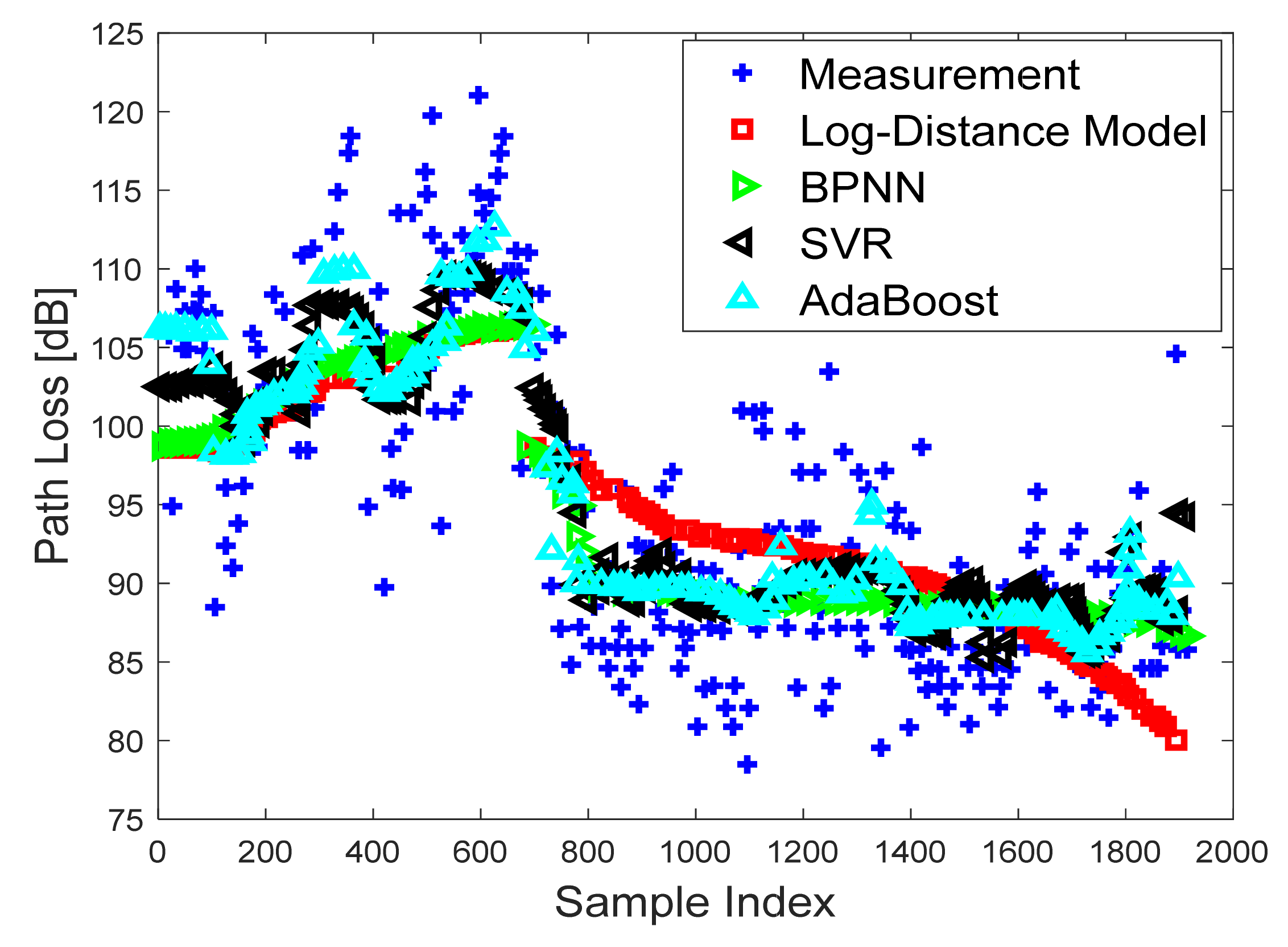
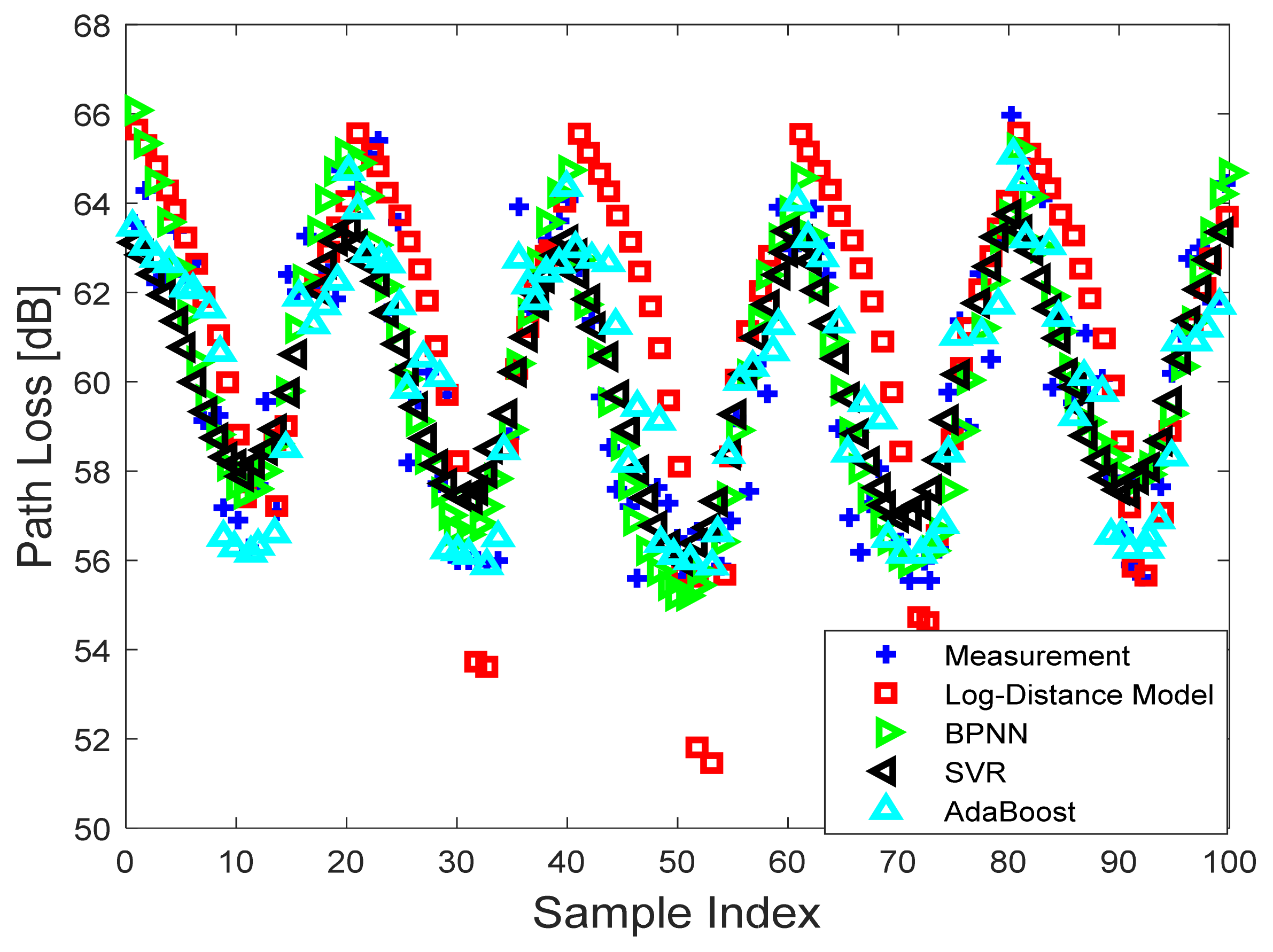
- In the tropics, the feasibility of various path loss models was verified by comparing them with measured data. The machine learning algorithms AdaBoost, SVR, and BPNN were used to develop the path loss prediction models for tropical regions, and validated using measurement data.
- (c)
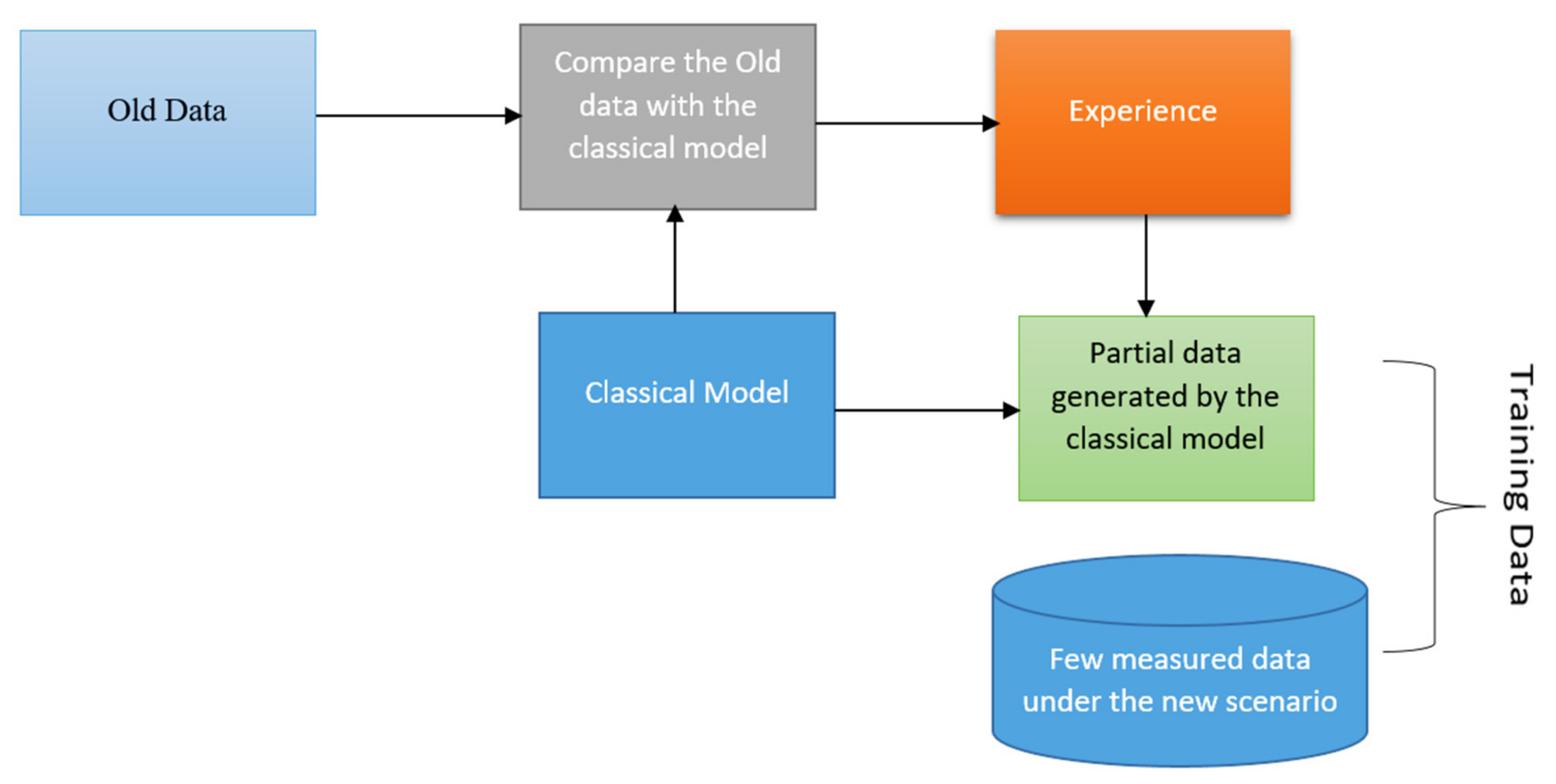
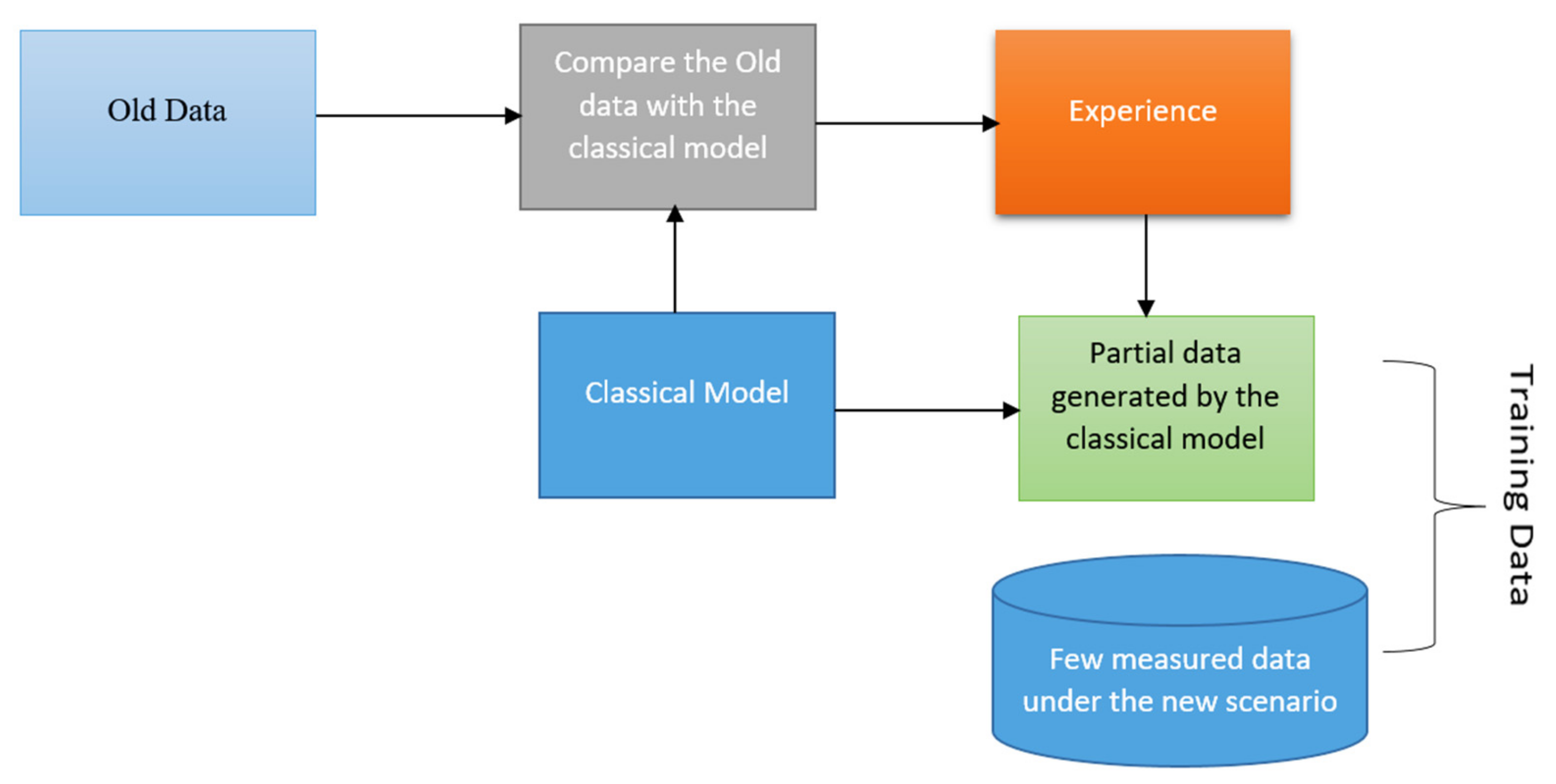
- A data expansion framework that matches machine learning algorithms and classical models together is proposed for the expansion of the training dataset. This will improve the prediction accuracy of path loss at a new frequency.
2. Measurement Campaign
3. Machine Learning Algorithms
3.1. SVR
3.2. AdaBoost Algorithm
3.3. ANN
4. Comparison of Methods
5. Data Expansion Approach
6. Conclusions and Future Directions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rappaport, T.S. Wireless Communications: Principles and Practice, 2nd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Phillips, C.; Sicker, D.; Grunwald, D. A Survey of Wireless Path Loss Prediction and Coverage Mapping Methods. IEEE Commun. Surv. Tutor. 2012, 15, 255–270. [Google Scholar] [CrossRef]
- Cogalan, T.; Videv, S.; Haas, H. Operating an In-Cabin Femto-Cellular System Within a Given LTE Cellular Network. IEEE Trans. Veh. Technol. 2018, 67, 7677–7689. [Google Scholar] [CrossRef]
- Neskovic, A.; Neskovic, N.; Paunovic, G. Modern approaches in modeling of mobile radio systems propagation environment. IEEE Commun. Surv. Tutor. 2000, 3, 2–12. [Google Scholar] [CrossRef]
- Ostlin, E.; Zepernick, H.-J.; Suzuki, H. Macrocell Path-Loss Prediction Using Artificial Neural Networks. IEEE Trans. Veh. Technol. 2010, 59, 2735–2747. [Google Scholar] [CrossRef]
- Erceg, V.; Greenstein, L.J.; Tjandra, S.Y.; Parkoff, S.R.; Gupta, A.; Kulic, B.; Julius, A.A.; Bianchi, R. An empirically based path loss model for wireless channels in suburban environments. IEEE J. Sel. Areas Commun. 1999, 17, 1205–1211. [Google Scholar] [CrossRef]
- Famoriji, O.J.; Olasoji, Y.O. UHF radio frequency propagation model for Akure metropolis. Res. J. Eng. Sci. 2013, 2, 6–10. [Google Scholar]
- Ayadi, M.; Ben Zineb, A.; Tabbane, S. A UHF Path Loss Model Using Learning Machine for Heterogeneous Networks. IEEE Trans. Antennas Propag. 2017, 65, 3675–3683. [Google Scholar] [CrossRef]
- Isabona, J.; Srivastava, V.M. Hybrid neural network approach for predicting signal propagation loss in urban microcells. In Proceedings of the 2016 IEEE Region 10 Humanitarian Technology Conference (R10-HTC), Agra, India, 21–23 December 2016; pp. 1–5. [Google Scholar]
- Faruk, N.; Popoola, S.I.; Surajudeen-Bakinde, N.T.; Oloyede, A.A.; Abdulkarim, A.; Ali, M.; Calafate, C.T.; Atayero, A.A.; Olawoyin, L.A. Path loss predictions in the VHF and UHF bands within urban environments: Experimental investigation of empirical, heuristics and geospatial models. IEEE Access 2019, 7, 77293–77307. [Google Scholar] [CrossRef]
- Wu, D.; Zhu, G.; Ai, B. Application of artificial neural networks for path loss prediction in railway environments. In Proceedings of the International Conference on Communications and Networking in China (CHINACOM), Beijing, China, 25–27 August 2010; pp. 1–5. [Google Scholar]
- Oroza, C.A.; Zhang, Z.; Watteyne, T.; Glaser, S.D. A Machine-Learning-Based Connectivity Model for Complex Terrain Large-Scale Low-Power Wireless Deployments. IEEE Trans. Cogn. Commun. Netw. 2017, 3, 576–584. [Google Scholar] [CrossRef]
- Popescu, I.; Nikitopoulos, D.; Nafornita, I.; Constantinou, P. ANN Prediction Models for Indoor Environment. In Proceedings of the 2006 IEEE International Conference on Wireless and Mobile Computing, Networking and Communications, Montreal, QC, Canada, 19–21 June 2006; pp. 366–371. [Google Scholar]
- Milijić, M.; Stanković, Z.; Milovanović, I. Hybrid-empirical neural model for indoor/outdoor path loss calculation. In Proceedings of the 2011 10th International Conference on Telecommunication in Modern Satellite Cable and Broadcasting Services (TELSIKS), Nis, Serbia, 5–8 October 2011; pp. 548–551. [Google Scholar]
- Zineb, A.B.; Ayadi, M. A multi-wall and multi-frequency indoor path loss prediction model using artificial neural networks. Arab. J. Sci. Eng. 2016, 41, 987–996. [Google Scholar] [CrossRef]
- Ayadi, M.; Ben Zineb, A. Body Shadowing and Furniture Effects for Accuracy Improvement of Indoor Wave Propagation Models. IEEE Trans. Wirel. Commun. 2014, 13, 5999–6006. [Google Scholar] [CrossRef]
- Zhao, X.; Hou, C.; Wang, Q. A New SVM-Based Modeling Method of Cabin Path Loss Prediction. Int. J. Antennas Propag. 2013, 2013, 279070. [Google Scholar] [CrossRef]
- Wen, J.; Zhang, Y.; Yang, G.; He, Z.; Zhang, W. Path Loss Prediction Based on Machine Learning Methods for Aircraft Cabin Environments. IEEE Access 2019, 7, 159251–159261. [Google Scholar] [CrossRef]
- Sotiroudis, S.P.; Goudos, S.K.; Gotsis, K.A.; Siakavara, K.; Sahalos, J.N. Application of a composite differential evo-lution algorithm in optimal neural network design for propagation path-loss prediction in mobile communication systems. IEEE Antennas Wirel. Propag. Lett. 2013, 12, 364–367. [Google Scholar] [CrossRef]
- Han, S.; Kim, H. On the Optimal Size of Candidate Feature Set in Random forest. Appl. Sci. 2019, 9, 898. [Google Scholar] [CrossRef]
- Imoize, A. Propagation measurements and modelling 1800 MHz in Lagos, Nigeria. Int. J. Wirel. Commun. Mob. Comput. 2013, 6, 165–173. [Google Scholar]
- Kavitha, K.N.; Ashok, S.; Imoize, A.L.; Ojo, S.; Selvan, K.S.; Ahanger, T.A.; Alhassan, M. On the Use of Wavelet Domain and Machine Learning for the Analysis of Epileptic Seizure Detection from EEG Signals. J. Healthc. Eng. 2022, 8928021. [Google Scholar] [CrossRef]
- Isabona, J.; Imoize, A.L.; Ojo, S.; Karunwi, O.; Kim, Y.; Lee, C.-C.; Li, C.-T. Development of a Multilayer Perceptron Neural Network for Optimal Predictive Modeling in Urban Microcellular Radio Environments. Appl. Sci. 2022, 12, 5713. [Google Scholar] [CrossRef]
- Zhang, Y.; Wen, J.; Yang, G.; He, Z.; Luo, X. Air-to-Air Path Loss Prediction Based on Machine Learning Methods in Urban Environments. Wirel. Commun. Mob. Comput. 2018, 8489326. [Google Scholar] [CrossRef]
- Hou, W.; Shi, D.; Gao, Y.; Yao, C. A new method for radio wave propagation prediction based on finite integral method and machine learning. In Proceedings of the 2017 IEEE 5th International Symposium on Electromagnetic Compatibility (EMC-Beijing), Beijing, China, 28–31 October 2017; pp. 1–4. [Google Scholar]
- Ojo, S.; Sari, A.; Ojo, T.P. Path Loss Modeling: A machine learning based approach using support vector regression and radial basis function models. Open J. Appl. Sci. 2022, 12, 990–1010. [Google Scholar] [CrossRef]
- Famoriji, O.J.; Oyeleye, M.O. A test of the relationship between refractivity and radio signal propagation for dry particulates. Res. Desk 2013, 2, 334–338. [Google Scholar]
- Famoriji, O.J.; Olasoji, Y.O. Radio frequency propagation mechanisms and empirical models for hilly areas. Int. J. Electr. Comput. Eng. 2013, 3, 372–376. [Google Scholar]
- Uccellari, M.; Facchini, F.; Sola, M.; Sirignano, E.; Vitetta, G.M.; Barbieri, A.; Tondelli, S. On the use of support vector ma-chines for the prediction of propagation losses in smart metering systems. In Proceedings of the 2016 IEEE 26th International Workshop on Machine Learning for Signal Processing (MLSP), Vietri sul Mare, Italy, 13–16 September 2016; pp. 1–6. [Google Scholar]
- Bishop, C.M. Pattern Recognition and Machine Learning (Information Science and Statistics); Springer: New York, NY, USA, 2006. [Google Scholar]
- De Sales Bezerra, T.; de Souza, J.A.R.; da Silva Eleutério, S.A.; Rocha, J.S. Approach to power prediction in WSN using propagation models: Practical analysis applied in water reservoirs. In Proceedings of the 2015 Latin American Network Operations and Management Symposium (LANOMS), João Pessoa, Brazil, 1–3 October 2015; pp. 73–76. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | AdaBoost | SVR | BPNN | Log-Distance |
|---|---|---|---|---|
| MAE (dB) | 1.15 | 1.17 | 1.99 | 1.32 |
| MAPE (%) | 5.47 | 5.73 | 6.35 | 7.45 |
| RMSE (dB) | 4.03 | 5.32 | 5.75 | 6.12 |
| ESD (dB) | 4.15 | 5.34 | 5.68 | 6.32 |
| MaxPE (dB) | 13.08 | 13.28 | 14.83 | 21.63 |
| Metric | AdaBoost | SVR | BPNN | Log-Distance |
|---|---|---|---|---|
| MAE (dB) | 1.06 | 1.26 | 1.87 | 1.02 |
| MAPE (%) | 5.12 | 5.23 | 5.94 | 6.66 |
| RMSE (dB) | 3.43 | 5.11 | 5.45 | 5.98 |
| ESD (dB) | 4.01 | 5.14 | 5.28 | 6.01 |
| MaxPE (dB) | 12.85 | 12.88 | 14.56 | 19.67 |
| Metric | AdaBoost | SVR | BPNN | Log-Distance |
|---|---|---|---|---|
| MAE (dB) | 1.65 | 2.11 | 3.39 | 2.22 |
| MAPE (%) | 6.47 | 6.73 | 7.35 | 8.45 |
| RMSE (dB) | 4.15 | 6.22 | 6.75 | 7.13 |
| ESD (dB) | 5.15 | 6.43 | 6.78 | 7.43 |
| MaxPE (dB) | 13.87 | 14.03 | 14.83 | 21.88 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Famoriji, O.J.; Shongwe, T. Path Loss Prediction in Tropical Regions using Machine Learning Techniques: A Case Study. Electronics 2022, 11, 2711. https://doi.org/10.3390/electronics11172711
Famoriji OJ, Shongwe T. Path Loss Prediction in Tropical Regions using Machine Learning Techniques: A Case Study. Electronics. 2022; 11(17):2711. https://doi.org/10.3390/electronics11172711
Chicago/Turabian StyleFamoriji, Oluwole John, and Thokozani Shongwe. 2022. "Path Loss Prediction in Tropical Regions using Machine Learning Techniques: A Case Study" Electronics 11, no. 17: 2711. https://doi.org/10.3390/electronics11172711
APA StyleFamoriji, O. J., & Shongwe, T. (2022). Path Loss Prediction in Tropical Regions using Machine Learning Techniques: A Case Study. Electronics, 11(17), 2711. https://doi.org/10.3390/electronics11172711