
A Monitoring System Based on NB-IoT and BDS/GPS Dual-Mode Positioning


Abstract
:1. Introduction
- (i)
- A new positioning system based on BeiDou System/Global Position System is proposed to improve the position accuracy. The hardware and software are introduced in detail in the paper. In the dual positioning system, more satellites can be obtained to calculate position information. The calculation formulas have also been derived.
- (ii)
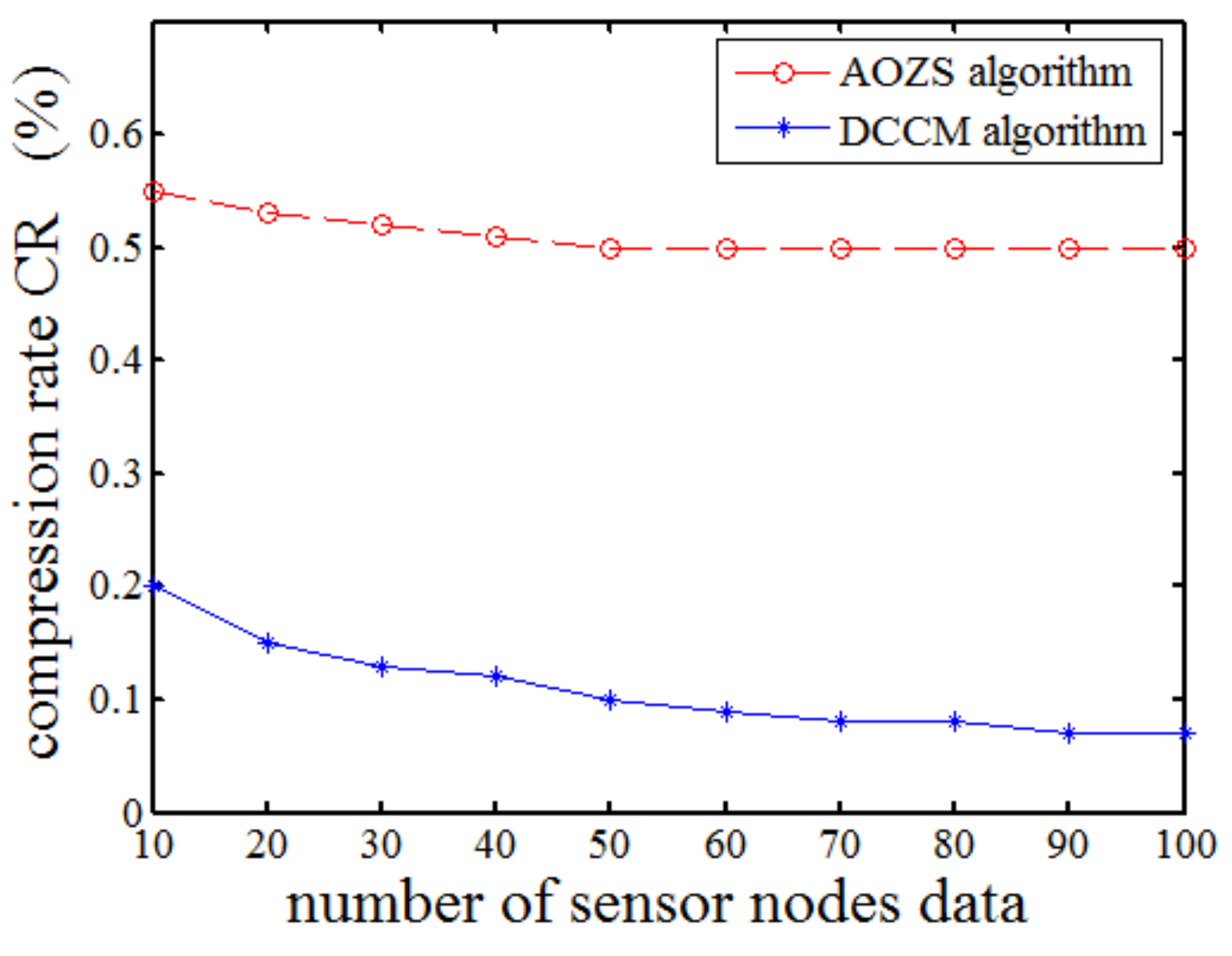
- A new data compression algorithm is proposed. The new algorithm removes data redundancy according to the time correlation between data, and the compression rate is about 90%, while the complexity of it is similar to that of the commonly used algorithms.
- (iii)
- A transmission network system based on NB-IoT for the compressed data is proposed. Compared with LoRa technology, the system is more stable, more reliable and lower packet loss rate through the experiment. The development period of the system is shorter and the cost is lower.
2. Materials and Methods
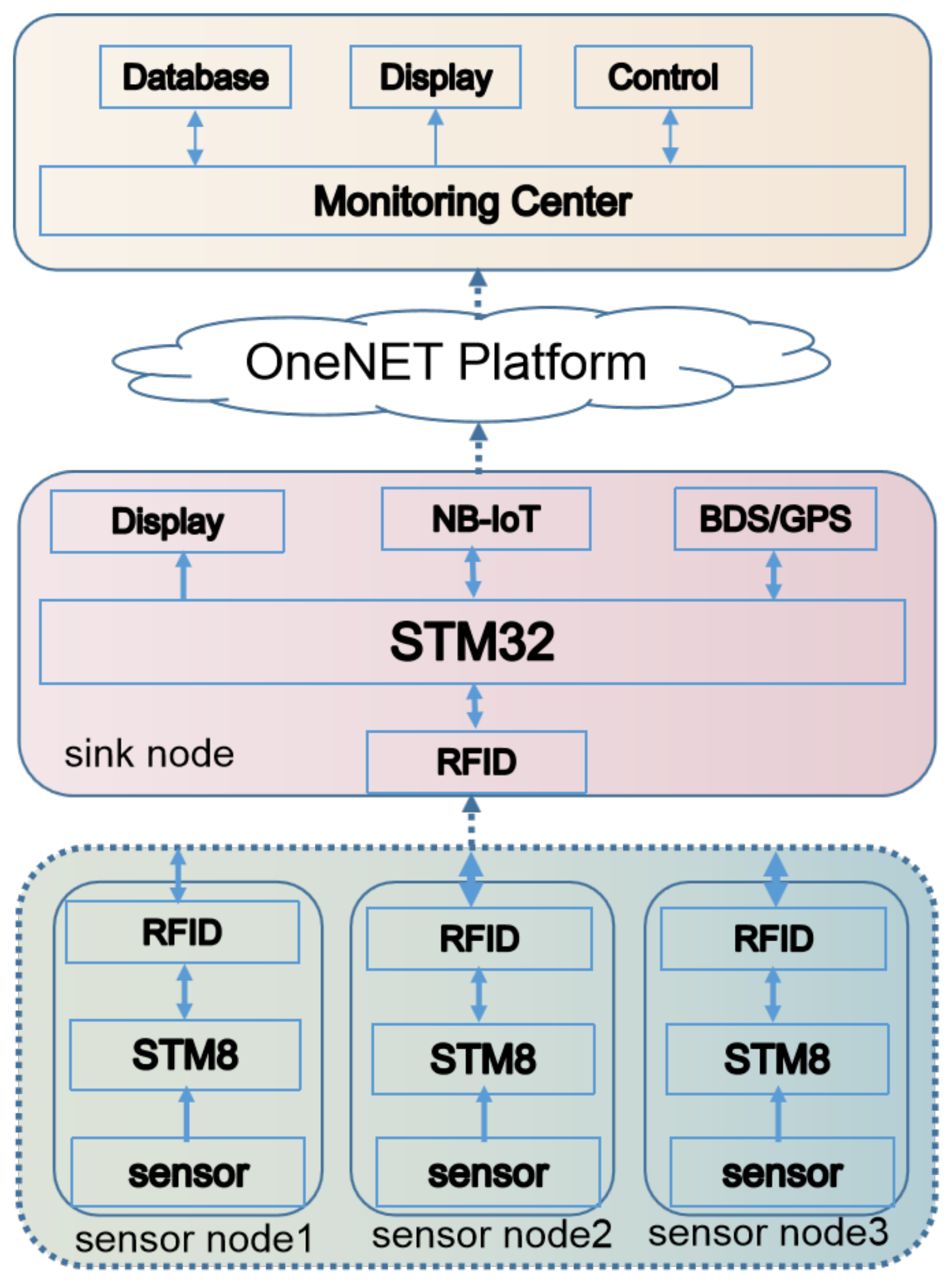
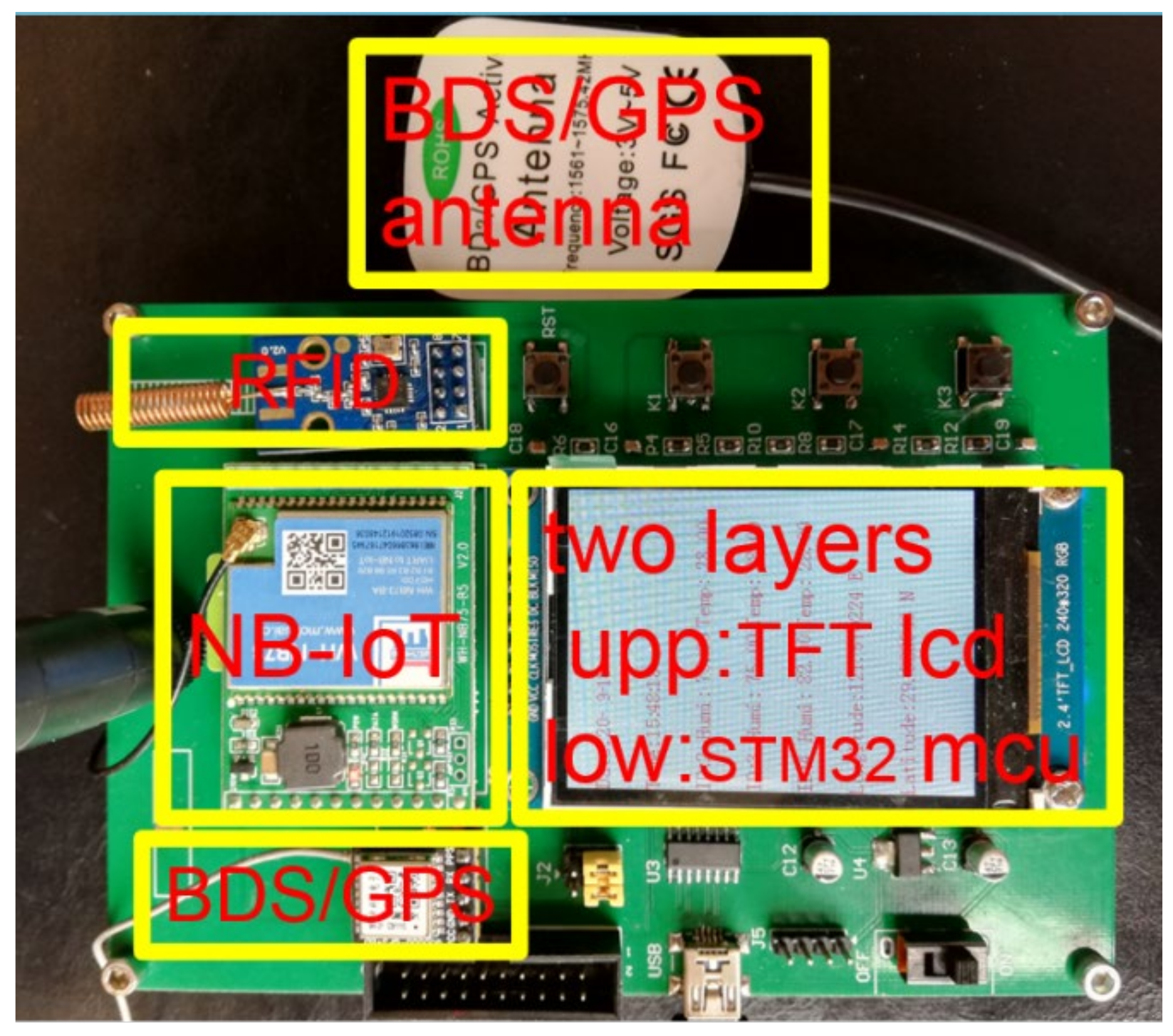
2.1. Hardware Design
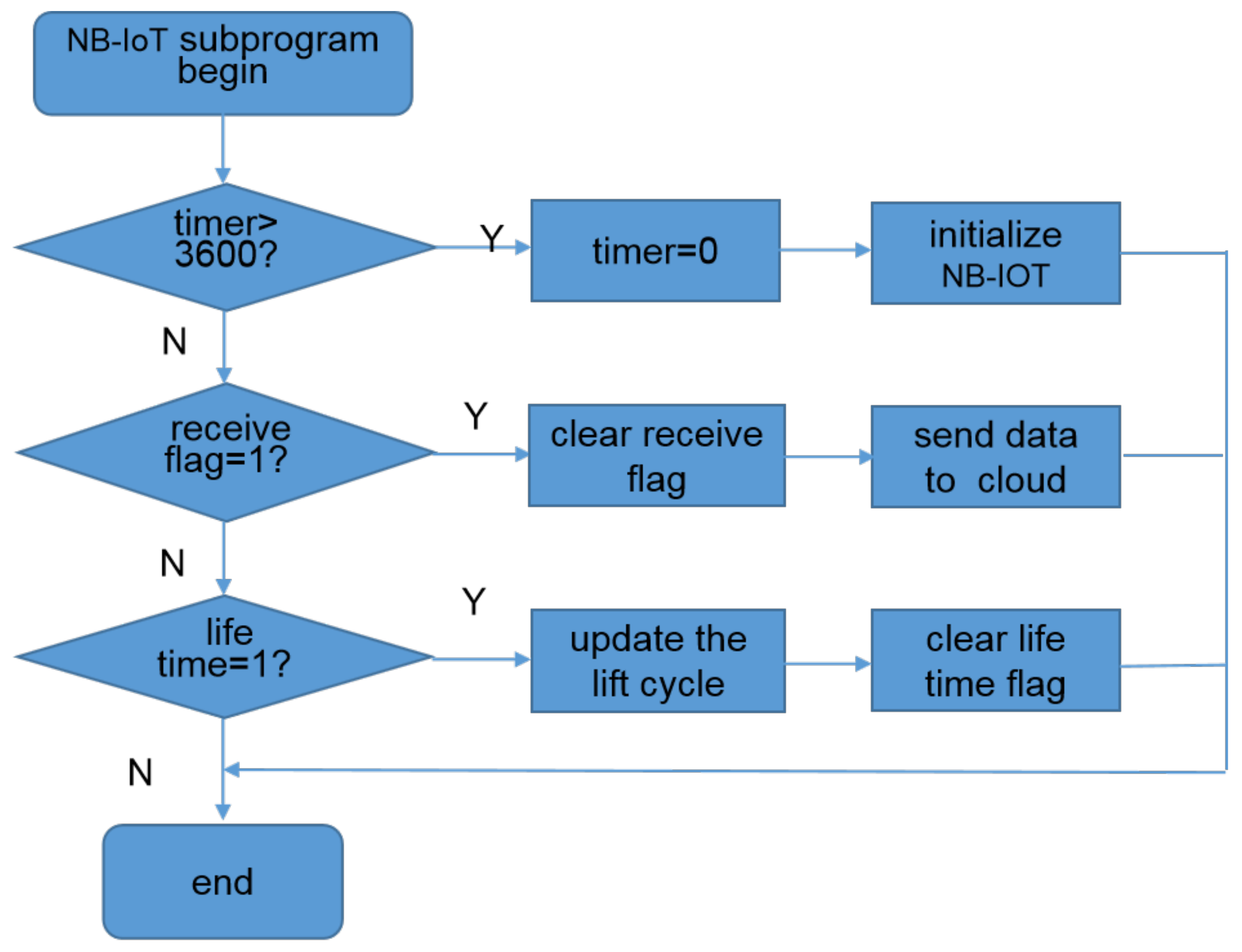
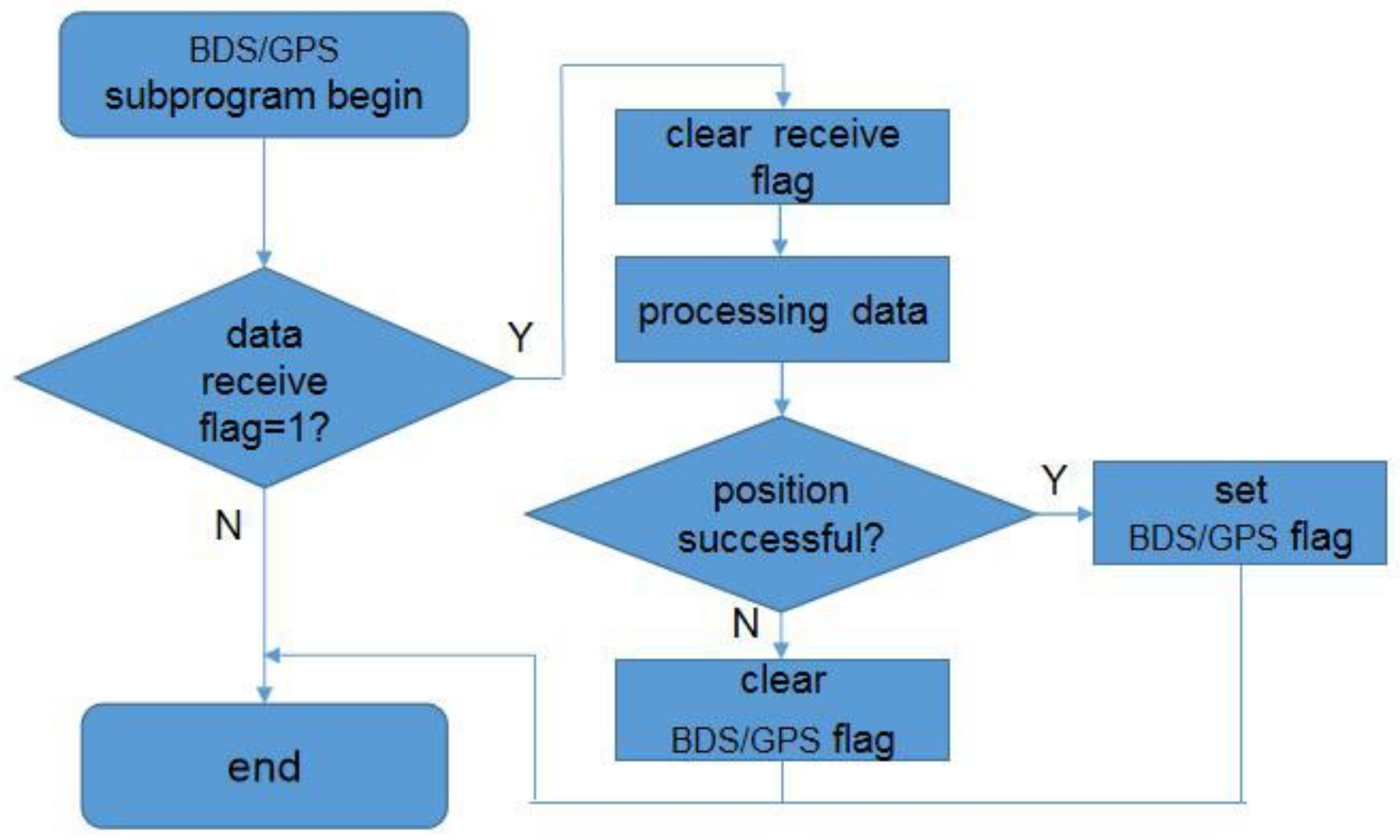
2.2. Software Design
2.2.1. Software Design of Sink Nodes

2.2.2. Software Design of Sensor Nodes and Monitoring Center
3. Results
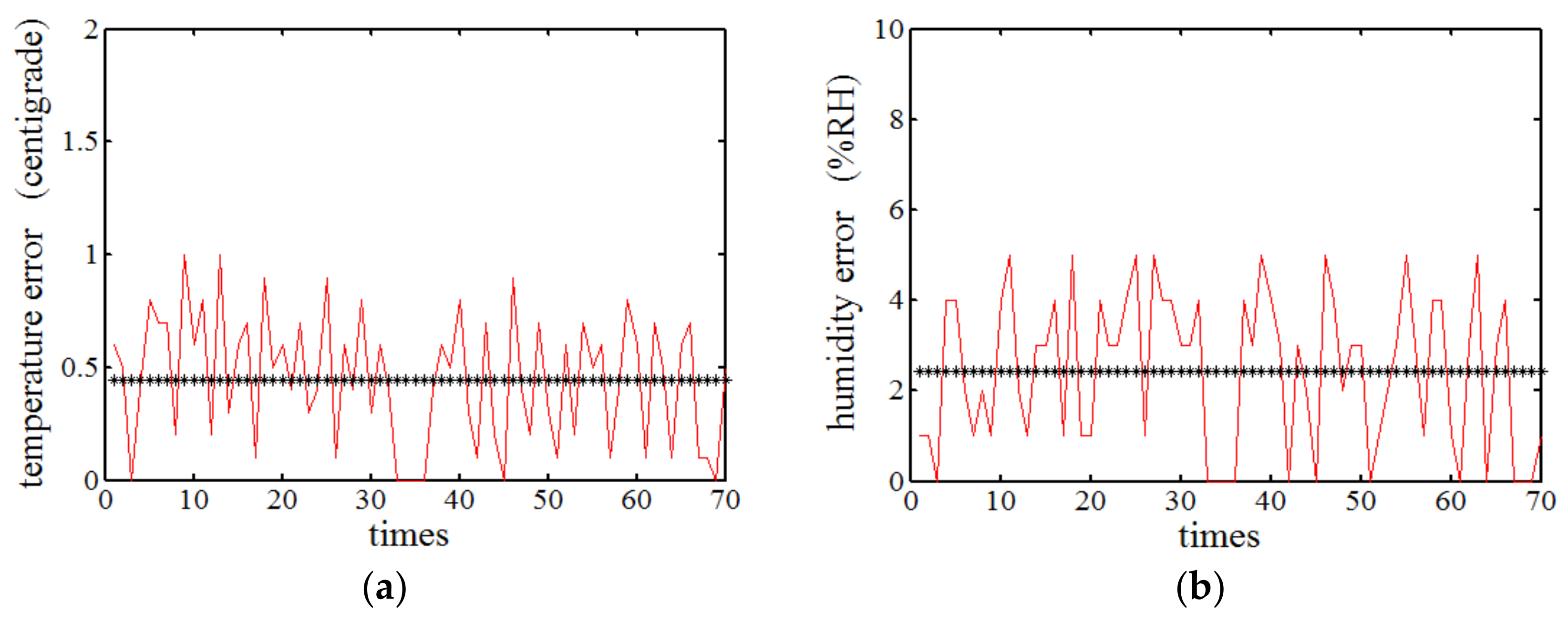
3.1. Measurement Accuracy
3.2. Network Performance Test
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Reynders, B.; Meert, W.; Pollin, S. Range and coexistence analysis of long range unlicensed communication. In Proceedings of the 2016 23rd International conference on Telecommunications, Thessaloniki, Greece, 16–18 May 2016. [Google Scholar]
- Centenaro, M.; Vangelista, L.; Zanella, A.; Zorzi, M. Long-range communications in unlicensed bands: The rising stars in the IoT and smart city scenarios. IEEE Wirel. Commun. 2016, 23, 60–67. [Google Scholar] [CrossRef] [Green Version]
- Patel, D.; Won, M. Experimemtnal study on low power wide area networks(LPWAN) for mobile Internet of Things. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference, Toronto, ON, Canada, 24–27 September 2017. [Google Scholar]
- Raza, U.; Kulkarni, P.; Sooriyabandara, M. Low power wide area networks: An overview. IEEE Commun. Surv. Tutor. 2017, 19, 855–873. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Cheng, X.; Xao, Y. Smart choice for the smart grid: Narrowband Internet of Things (NB-IoT). IEEE Internet Things J. 2018, 5, 1505–1515. [Google Scholar] [CrossRef]
- Duangsuwan, S.; Takarn, A.; Nujankaew, R. A study of air pollution smart sensors LPWAN via NB-IoT for Thailand smart cities 4.2. In Proceedings of the 10th International Conference on Knowledge and Smart Technology, Chiang Mai, Thailand, 31 January–3 February 2018. [Google Scholar]
- Lauridsen, M.; Krigslund, R.; Rohr, M. An empirical NB-IoT power consumption model for battery lifetime estimation. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference, Toronto, ON, Canada, 24–27 September 2017. [Google Scholar]
- Sotirios, K.G.; Margot, D.; David, P.; Luc, M.; Kostas, E.P. A Novel Design Approach for 5G Massive MIMO and NB-IoT Green Networks Using a Hybrid Jaya-Differential Evolution Algorithm. IEEE Access 2019, 7, 105687–105700. [Google Scholar]
- Li, H.; Dong, W.; Wang, Y.; Gao, Y.; Chen, C. Enhancing the Performance of 802.15.4-Based Wireless Sensor Networks with NB-IoT. IEEE Internet Things J. 2020, 7, 3523–3534. [Google Scholar] [CrossRef]
- Pilar, A.M.; Pablo, A.; Jonathan, P.G. An Analytical Performance Evaluation Framework for NB-IoT. IEEE Internet Things J. 2019, 6, 7232–7240. [Google Scholar]
- Ahmad, A. Toward Achieving a Balance between the User Satisfaction and the Power Conservation in the Internet of Things. IEEE Internet J. 2022, 8, 10998–11015. [Google Scholar]
- Gayathri, N.; Rakesh, K.S.; Rizwan, P. Ensemble Classification and IoT-Based Pattern Recognition for Crop Disease Monitoring System. IEEE Internet J. 2021, 8, 12847–12854. [Google Scholar]
- Joseph, H.A.; Tang, Y.; Celestine, I.; Desire, N. A Secure Multiuser Privacy Technique for Wireless IoT Networks Using Stochastic Privacy Optimization. IEEE Internet J. 2022, 9, 2566–2577. [Google Scholar]
- Ayoub, W.; Samhat, A.E.; Nouvel, F.; Mroue, M.; Prévotet, J.C. Internet of Mobile Things: Overview of LoRaWAN, DASH7, and NB-IoT in LPWANs standards and Supported Mobility. IEEE Commun. Surv. Tutor. 2019, 21, 1561–1581. [Google Scholar] [CrossRef] [Green Version]
- Chakrapani, A. NB-IoT Uplink Receiver Design and Performance Study. IEEE Internet Things J. 2020, 7, 2469–2482. [Google Scholar] [CrossRef] [Green Version]
- Nancy, A.A.; Ravindran, D.; Raj Vincent, P.D.; Srinivasan, K.; Gutierrez Reina, D. IoT-Cloud-Based Smart Healthcare Monitoring System for Heart Disease Prediction via Deep Learning. Electronics 2022, 11, 2292. [Google Scholar] [CrossRef]
- Bencak, P.; Hercog, D.; Lerher, T. Indoor Positioning System Based on Bluetooth Low Energy Technology and a Nature-Inspired Optimization Algorithm. Electronics 2022, 11, 308. [Google Scholar] [CrossRef]
- Shi, J.; Jin, L.P.; Li, J.; Fang, Z.X. A smart parking system based on NB-IoT and third-party payment platform. In Proceedings of the International Symposium on Communications and Information Technologies, Cairns, Australia, 25–27 September 2017. [Google Scholar]
- Mandza, Y.S.; Raji, A. IoTivity Cloud-Enabled Platform for Energy Management Applications. IoT 2022, 3, 73–90. [Google Scholar] [CrossRef]
- Zhang, H.; Li, J.; Wen, B.; Xun, Y.; Liu, J. Connecting Intelligent Things in Smart Hospitals Using NB-IoT. IEEE Internet Things J. 2018, 5, 1550–1560. [Google Scholar] [CrossRef]
- Srikanth, K.; Dmitri, M.; Aleksandr, O.; Sergey, A. Performance Analysis of Onshore NB-IoT for Container Tracking during Near-the-Shore Vessel Navigation. IEEE Internet Things J. 2020, 7, 2928–2943. [Google Scholar]
- Zhang, X.; Zhang, M.; Meng, F.; Qiao, Y.; Xu, S.; Hour, S. A Low-Power Wide-Area Network Information Monitoring System by Combining NB-IoT and LoRa. IEEE Internet Things J. 2019, 6, 590–598. [Google Scholar] [CrossRef]
- Cao, T.P.; Duy, D.P.; Hoang, V.T.; Trung, V.T.; Phat, N.H. Applying the IoT platform and green wave theory to control intelligent traffic lights system for urban areas in Vietnam. KSII Trans. Internet Inf. Syst. 2019, 13, 34–51. [Google Scholar]
- Sinha, R.S.; Wei, Y.; Hwang, S.H. A survey on LPWAN technology: LoRa and NB-IoT. ICT Express 2017, 3, 14–21. [Google Scholar] [CrossRef]
- Wu, Z.; Liu, R.; Cao, H. ECDSA-Based Message Authentication Scheme for BeiDou-II Navigation Satellite System. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 1666–1682. [Google Scholar] [CrossRef]
- Wei, H.; Pascale, D. BeiDou Time Transfer with the Standard CGGTTS. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2016, 63, 1005–1012. [Google Scholar]
- Su, M.; Yang, Y.; Jiang, J. BeiDou system satellite-induced pseudorange multipath bias mitigation based on different orbital characteristic for static applications. IET Radar Sonar Navig. 2020, 14, 242–251. [Google Scholar] [CrossRef]
- Qin, H.; Liu, P.; Cong, L.; Ji, W. Triple-Frequency Combining Observation Models and Performance in Precise Point Positioning Using Real BDS Data. IEEE Access 2019, 7, 69826–69836. [Google Scholar] [CrossRef]
- Zhang, Y.; Tian, L.; Meng, W.; Gu, Q.; Han, Y.; Hong, Z. Feasibility of Code-Level Altimetry Using Coastal BeiDou Reflection (BeiDou-R) Setups. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 4130–4140. [Google Scholar] [CrossRef]
- Wu, Y.H.; Zheng, M.H.; He, W.; Chen, Z.M.; Hua, B. Intelligent vehicle safety system based on BeiDou satellite navigation system. IET Intell. Transp. Syst. 2019, 13, 967–974. [Google Scholar] [CrossRef]
- Fan, L.; Tu, R.; Zhang, R.; Zheng, Z.; Liu, J.; Hong, J.; Lu, X. Real-time BDS signal-in-space anomaly detection method considering receiver anomalies. IET Radar Sonar Navig. 2019, 13, 2220–2229. [Google Scholar] [CrossRef]
- Wang, E.; Yang, D.; Wang, C.; Huang, Y.; Qu, P.; Pang, T. Optimized Fault Detection Algorithm Aided by BDS Baseband Signal for Train Positioning. Chin. J. Electron. 2020, 29, 34–40. [Google Scholar] [CrossRef]
- Wang, L.; Li, Z.; Yuan, H.; Zhao, J.; Zhou, K.; Yuan, C. Influence of the time-delay of correction for BDS and GPS combined real-time differential positioning. Electron. Lett. 2016, 52, 1063–1065. [Google Scholar] [CrossRef]
- Jiang, W.; Chen, S.; Cai, B.; Wang, J.; ShangGuan, W.; Rizos, C. A Multi-Sensor Positioning Method-Based Train Localization System for Low Density Line. IEEE Trans. Veh. Technol. 2018, 67, 10425–10437. [Google Scholar] [CrossRef]
- Zhu, Y.; Liu, Y.; Wang, Z.; Li, Q. Evaluation of GBAS flight trials based on BDS and GPS. IET Radar Sonar Navig. 2020, 14, 233–241. [Google Scholar] [CrossRef]
- Ketshabetswe, L.K.; Zungeru, A.M.; Mangwala, M.; Chuma, J.M.; Sigweni, B. Communication protocols for wireless sensor networks: A survey and comparison. Heliyon 2019, 5, e01591. [Google Scholar] [CrossRef] [Green Version]
- Capo-Chichi, E.P.; Guyennet, H.; Friedt, J.M. K-RLE: A new data compression algorithm for wireless sensor network. In Proceedings of the IEEE 2009 Third International Conference on Sensor Technologies and Applications (SENSORCOMM), Athens, Glyfada, 18–23 July 2009. [Google Scholar]
- Zhang, H.; Fan, X.P.; Liu, S.Q. Design and realization of improved LZW algorithm for wireless sensor networks. In Proceedings of the International Conference on Information Science and Technology(ICIST), Changsha, China, 26–28 May 2011. [Google Scholar]
- Das, P. Implementing Dial-On-Demand Technique for Inter and Intra Cluster Communication in Energy Conserving Postbox Delay Tolerant Networks. In Proceedings of the International Conference on Computational Intelligence, Communications, and Business Analytics, Kalyani, India, 27–28 July 2018. [Google Scholar]
- Ahmad, M.S.; Lata, S.; Mehfuz, S.; Ahmad, A. Lossless Compression Algorithm for Energy Efficient Wireless Sensor Network. In Proceedings of the 2019 International Conference on Power Electronics, Control and Automation (ICPECA), New Delhi, India, 16–17 November 2019. [Google Scholar]
- Mo, Y.B.; Qiu, Y.B.; Liu, J.Z. A data compression algorithm based on adaptive huffman code for wireless sensor networks. In Proceedings of the 2011 International Conference on Intelligent Computation Technology and Automation (ICICTA), Nanjing, China, 3–6 September 2011. [Google Scholar]
- Xie, L.; Chen, L.J.; Chen, D.X. Clustering-based approximate scheme for data aggregation over sensor networks. J. Softw. 2009, 20, 1023–1037. [Google Scholar]
- Hu, J.; Shen, L.F. Novel clustering algorithm for wireless sensor networks. J. Commun. 2008, 29, 20–29. [Google Scholar]
- Zhu, X.R.; Shen, L.F.; Tak-Shing, P.Y. Hausdorff clustering and minimum energy routing for wireless sensor networks. IEEE Trans. Veh. Technol. 2009, 58, 990–997. [Google Scholar] [CrossRef] [Green Version]
- Ciancio, A.; Pattem, S.; Ortega, A. Energy-efficient data representation and routing for wireless sensor networks based on a distributed wavelet compression algorithm. In Proceedings of the Fifth International Conference on Information Processing in Sensor Networks, Palo Alto, CA, USA, 7–10 July 2006. [Google Scholar]
- Donoho, D.L. Message passing algorithms for compressed sensing: I. motivation and construction. In Proceedings of the IEEE Information Theory Workshop 2010, Cairo, Egypt, 2–6 January 2010. [Google Scholar]
- Marcelloni, F.; Vecchio, M. A simple algorithm for data compression in wireless sensor networks. IEEE Commun. Lett. 2008, 12, 411–413. [Google Scholar] [CrossRef]
- Fan, X.H.; Li, S.N.; Du, P.L. Simple algorithm for self-adapting lossless data compression in WSN. Comput. Meas. Control 2010, 18, 463–465. [Google Scholar]
- Xia, Y.C.; Chen, L.L.; Chen, X. Research on data compression in wireless sensor networks-with wavelet lifting algorithm and difference mechanism. Comput. Eng. Appl. 2010, 46, 109–112. [Google Scholar]
- WH-NB75-BA Datasheet. Available online: http://www.mokuai.cn/products/67.html (accessed on 4 June 2022).
- AT6558 Manual. Available online: http://www.icofchina.com/pro/dingwei/2016-07-29/5.html (accessed on 4 June 2022).
- CC1101 Data Sheet. Available online: https://wenku.baidu.com/view/c2b0081b227916888486d769.html (accessed on 4 June 2022).
- NMEA0183 Protocol. Available online: https://blog.csdn.net/st526403649/article/details/54946529 (accessed on 4 June 2022).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bit Numbers | Code | Cx (x = 2, 3,…, 9) | (i = 2, 3,…, 9) |
|---|---|---|---|
| 2 | 000 | C2 = 2 | = 3 |
| 3 | 001 | C3 = 3 | = 7 |
| 4 | 010 | C4 = 4 | = 15 |
| 5 | 011 | C5 = 5 | = 31 |
| 6 | 100 | C6 = 6 | = 63 |
| 7 | 101 | C7 = 7 | = 127 |
| 8 | 110 | C8 = 8 | = 255 |
| 9 | 111 | C9 = 9 | = 511 |
| Orignal Data | d = 15 | d = 4 | d = 6 | d = 2 | r |
|---|---|---|---|---|---|
| 15 | 0 | 0 | 0 | 0 | 0 |
| 19 | 4 | 0 | 0 | 0 | 0 |
| 19 | 4 | 0 | 0 | 0 | 1 |
| 23 | 8 | 6 | 0 | 0 | 0 |
| 25 | 10 | 8 | 2 | 0 | 0 |
| 25 | 10 | 8 | 2 | 0 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, Z.; Zhang, R.; Fang, J.; Zheng, L. A Monitoring System Based on NB-IoT and BDS/GPS Dual-Mode Positioning. Electronics 2022, 11, 2493. https://doi.org/10.3390/electronics11162493
Xie Z, Zhang R, Fang J, Zheng L. A Monitoring System Based on NB-IoT and BDS/GPS Dual-Mode Positioning. Electronics. 2022; 11(16):2493. https://doi.org/10.3390/electronics11162493
Chicago/Turabian StyleXie, Zhibo, Ruihua Zhang, Juanni Fang, and Liyuan Zheng. 2022. "A Monitoring System Based on NB-IoT and BDS/GPS Dual-Mode Positioning" Electronics 11, no. 16: 2493. https://doi.org/10.3390/electronics11162493
APA StyleXie, Z., Zhang, R., Fang, J., & Zheng, L. (2022). A Monitoring System Based on NB-IoT and BDS/GPS Dual-Mode Positioning. Electronics, 11(16), 2493. https://doi.org/10.3390/electronics11162493