
A Microscopic Platoon Stability Model Using Vehicle-to-Vehicle Communication



Abstract
:1. Introduction
- Firstly, it is unclear how different vehicle dynamic parameters and the typical platoon dynamics (merging, splitting, and speed-change) affect the stability of the VANET-based platoon structure. The inherent relationship between the platoon stability probability and the observed transportation parameters, for instance, traffic density, relative vehicle speed, the deviation in relative vehicle speed, and the time headway of the platoon. It is necessary to provide insightful guidance on the design mechanism to maintain a stable platoon in the presence of different kinds of disturbance.
- Secondly, most of the existing research focused only on maintaining a stable platoon (e.g., constant inter-vehicle distance) rather than addressing the adverse effects of traffic variations. Traffic disturbances lead to frequent, sudden acceleration or deceleration, which lead to an uncomfortable passenger experience and to more fuel consumption [24]. A practical method to mitigate these negative impacts is essential and highly desirable.
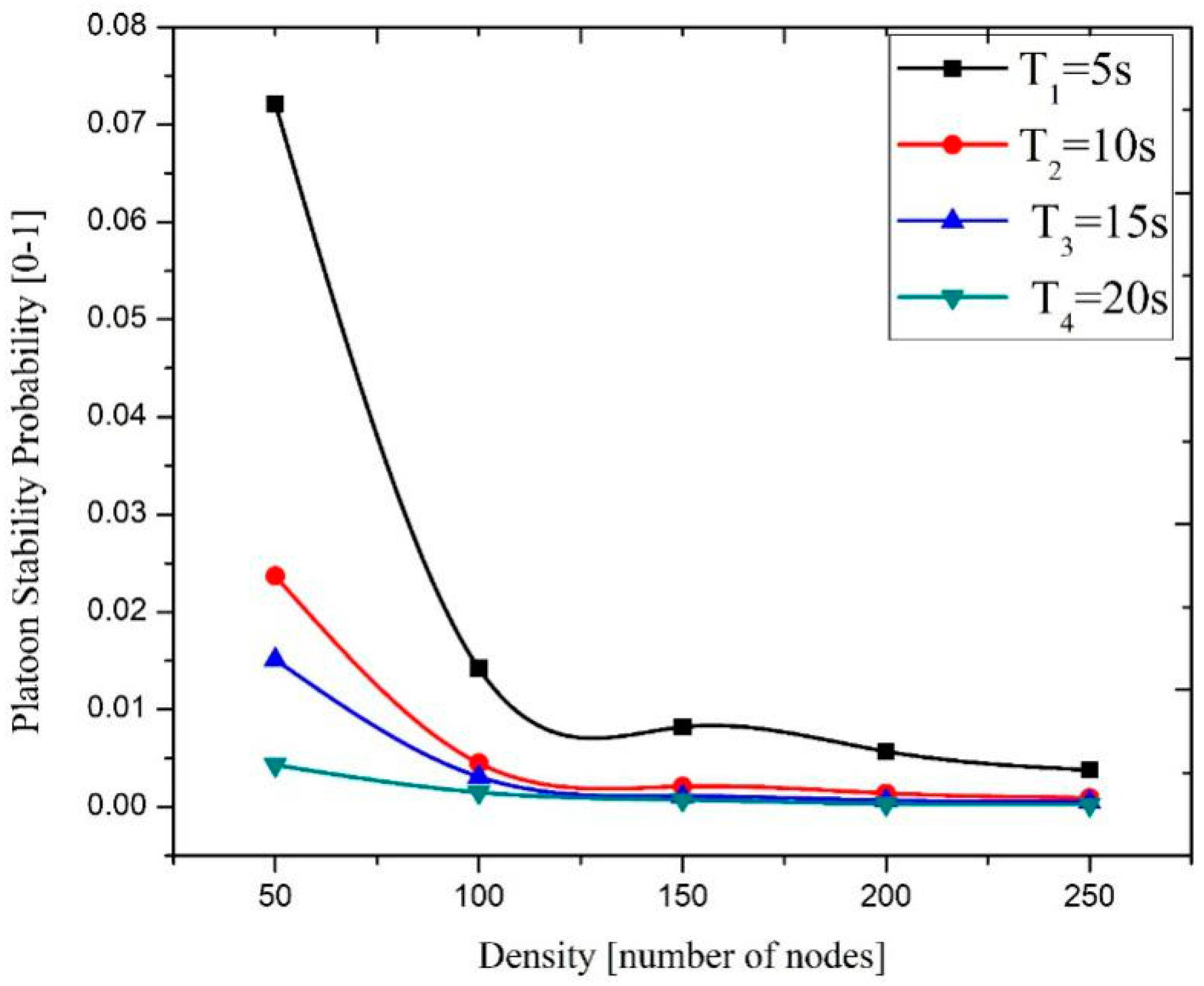
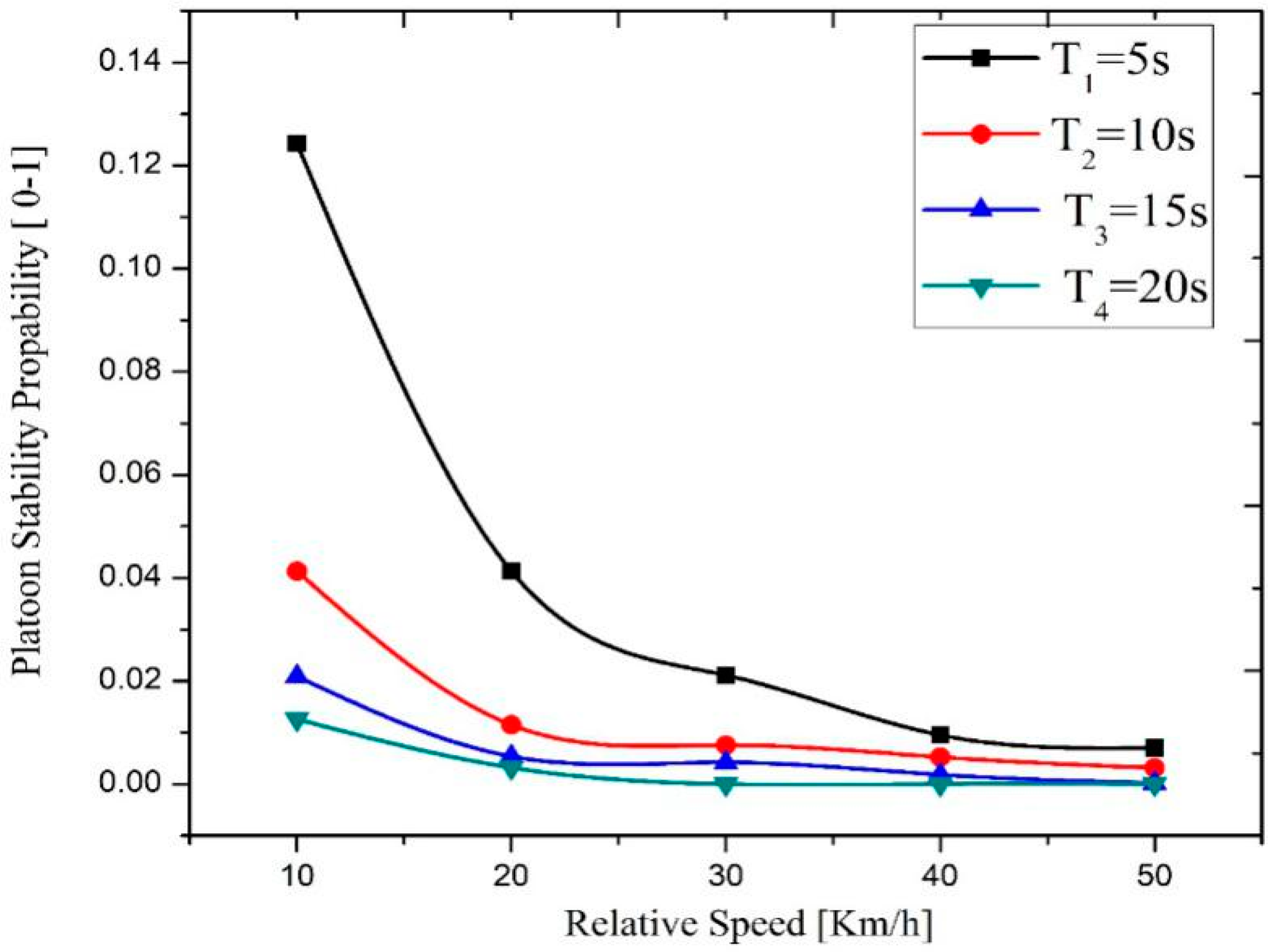
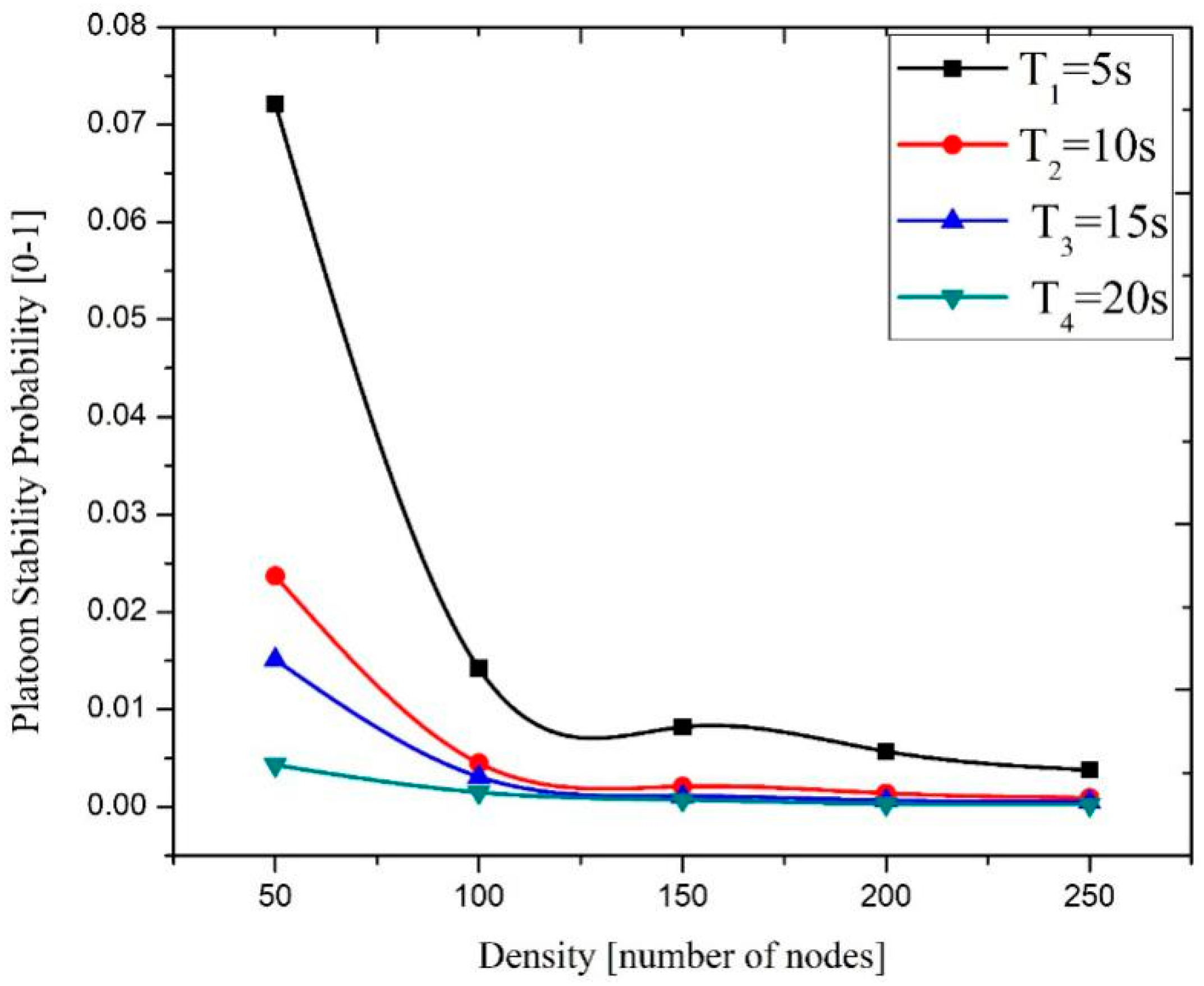
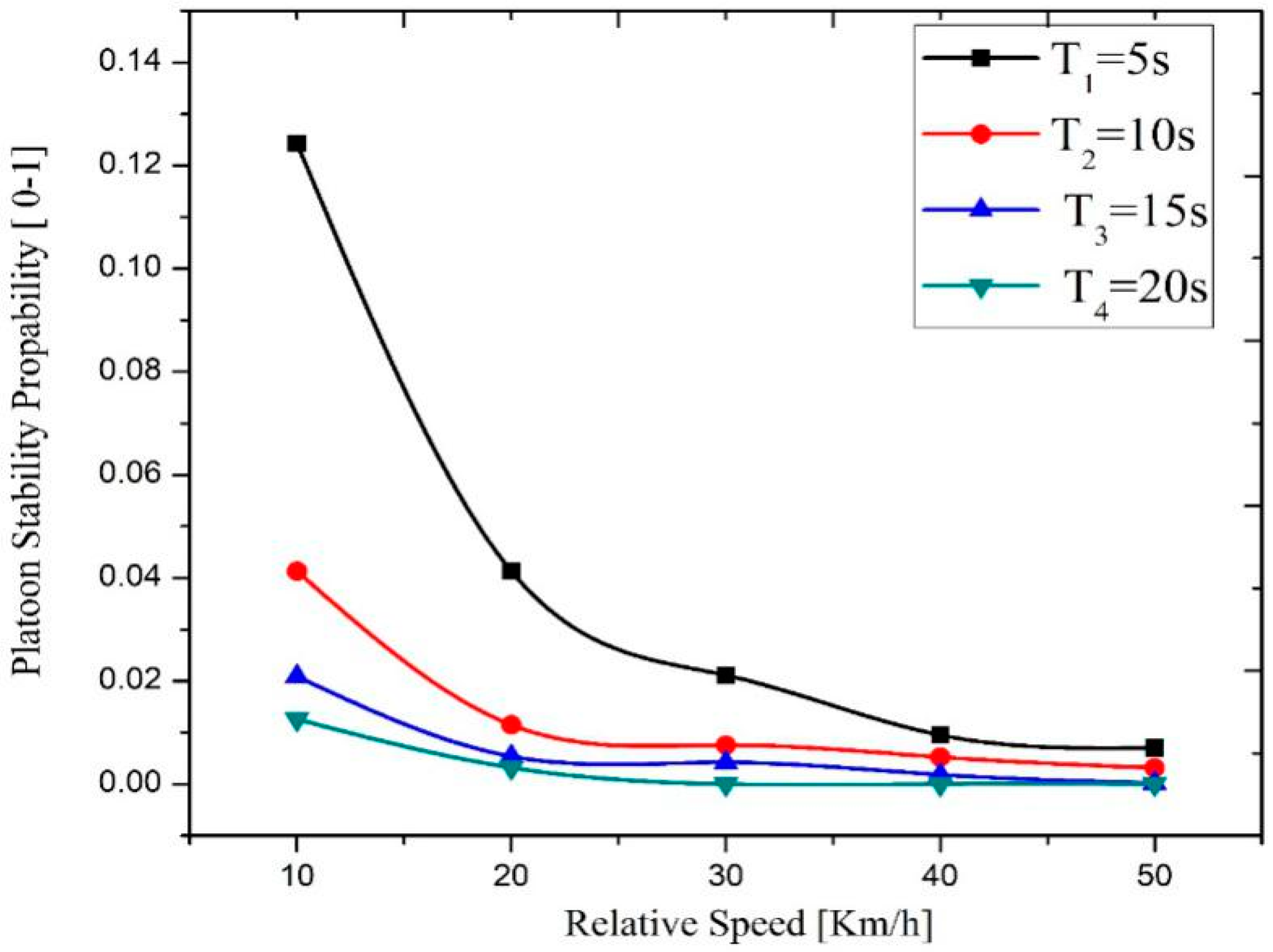
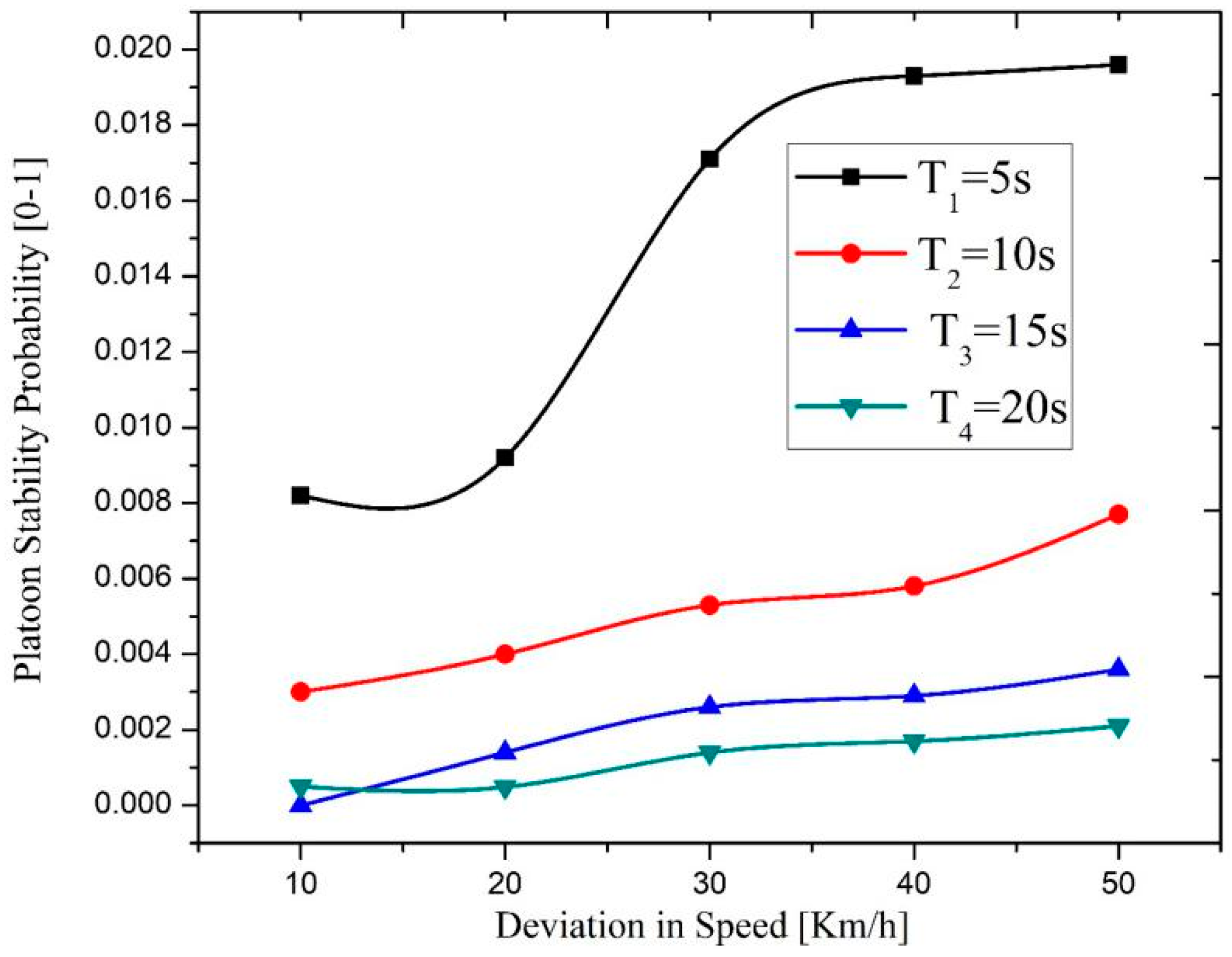
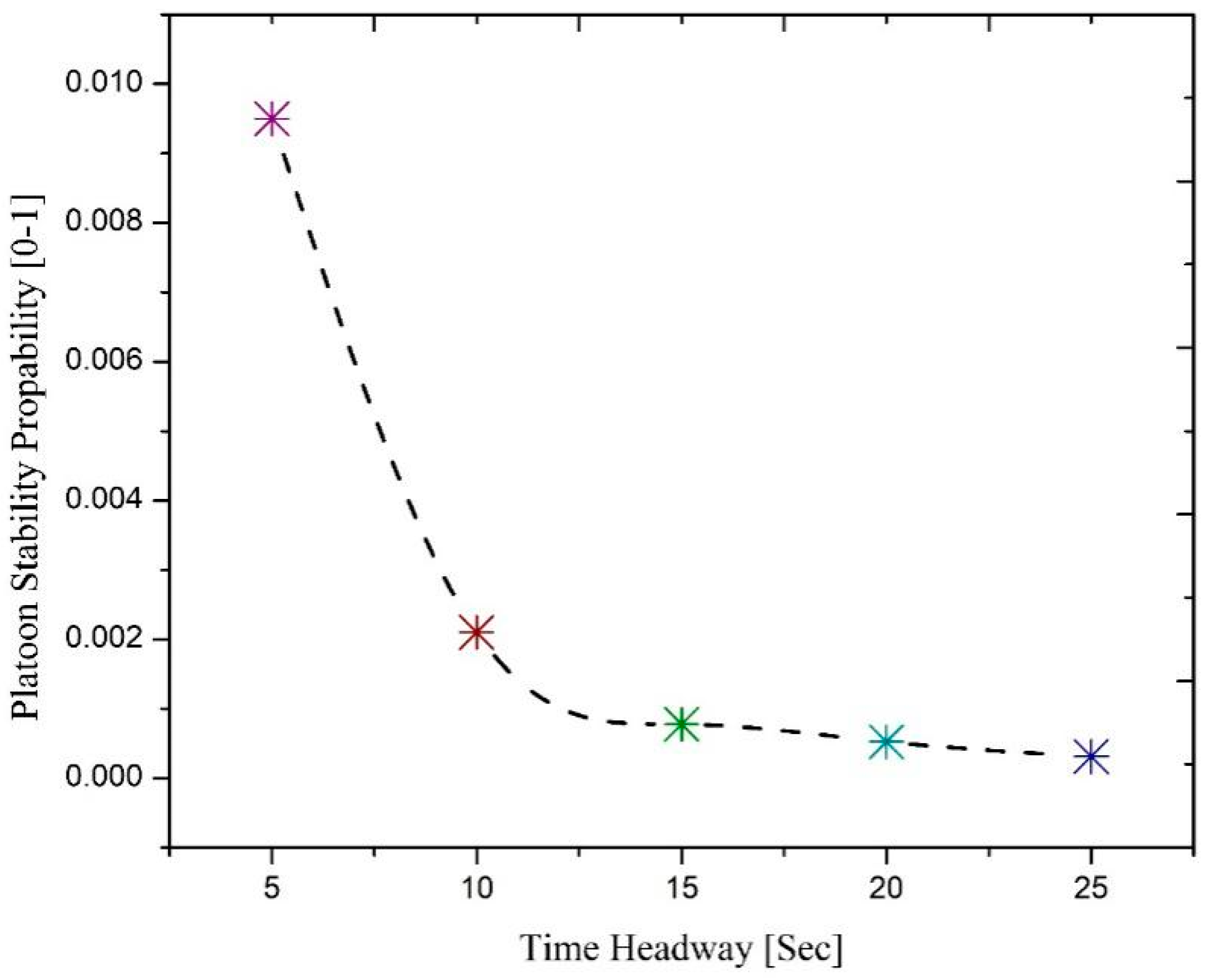
- We derive the stability probability of the VANET-based dynamic platoon system to reveal the inherent relationship between the platoon stability and key transportation parameters (traffic density, relative speed, and time headway). It is shown that increasing the average relative speed, vehicle density, and time headway degrade platoon stability. However, it raises the standard deviation of the relative speed, decreases the equivalent relative velocity, and thus improves the platoon stability probability. Therefore, these parameters cannot be ignored when designing the dynamic platoon management mechanism.
- A microscopic platoon management design is proposed to deal with three basic dynamic platoon maneuvers: merging, splitting, and speed-change. Each vehicle counts its neighbors from iterative beacon messages and estimates the time spacing between the consecutive cars. It is shown that by keeping a reasonable time headway, we can retain the desired dynamic platoon stability.
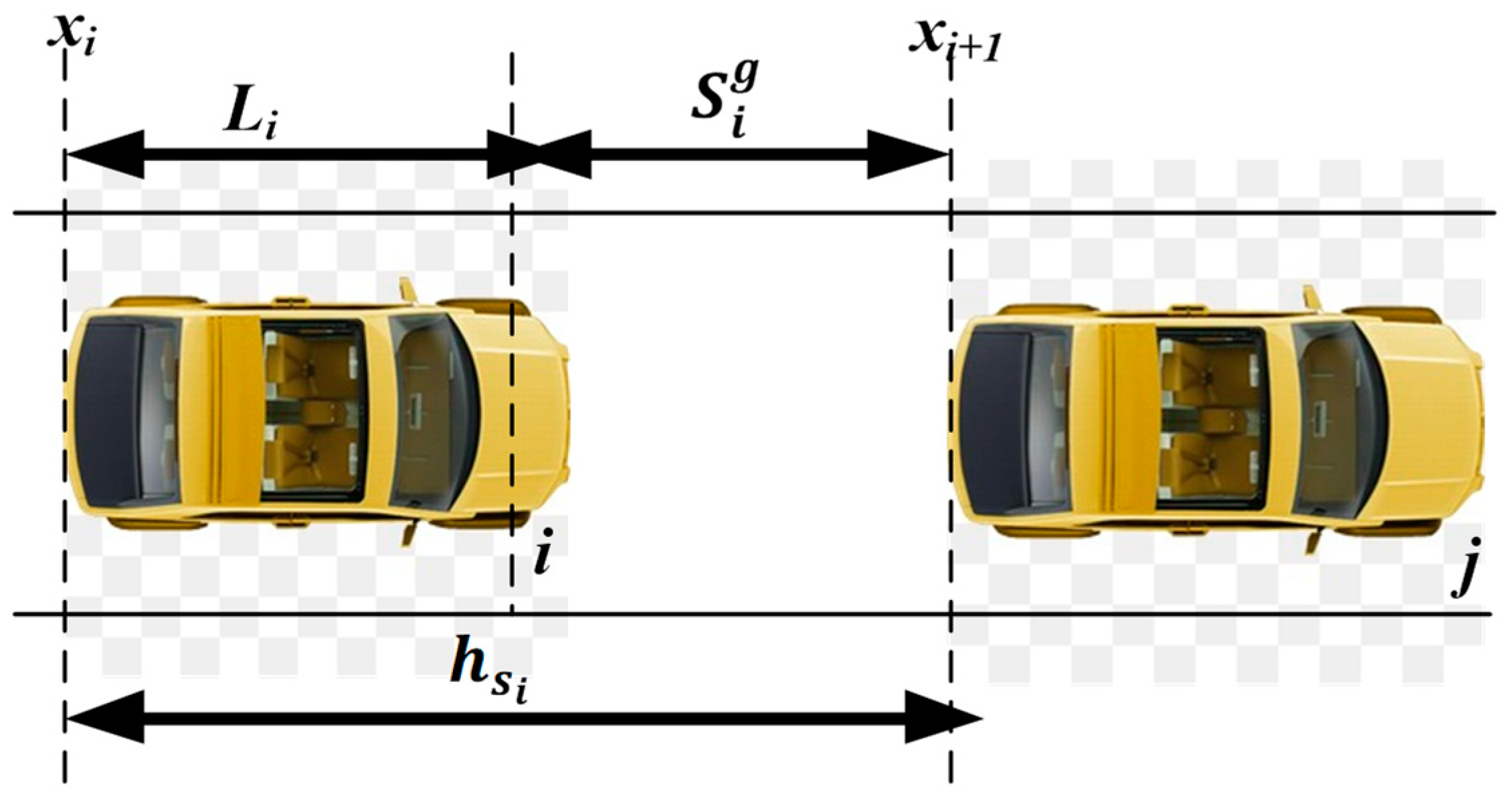
2. System Model and Platoon Stability Formulation
3. Proposed V2V-Based Platoon Stability
3.1. Beacon Message Dissemination
- In VANETS, every vehicle periodically disseminates its basic information through beacon messages with neighboring vehicles. The disseminated beacon messages are very important for platoon maintenance and vehicle coordination. It is assumed that all vehicles in the platoon are capable of V2V and V2I communications within DSRC range. The information dissemination is divided into two parts. i.e., (i) primary parameter exchange (ii) platoon control message.
- Primary parameter exchange: The vehicles in the platoon periodically exchange micro-beacon messages with each other, and the cars abstract the position, speed, acceleration, direction, and additional information embedded in these micro-beacon messages to calculate neighbors within its DSRC communication range [28]. The newly introduced transportation control domain of periodic beacon messages is given in Table 1. Every vehicle calculates its distinct neighbors in the same platoon ID (Pid) and the headway/time gap T between each other.
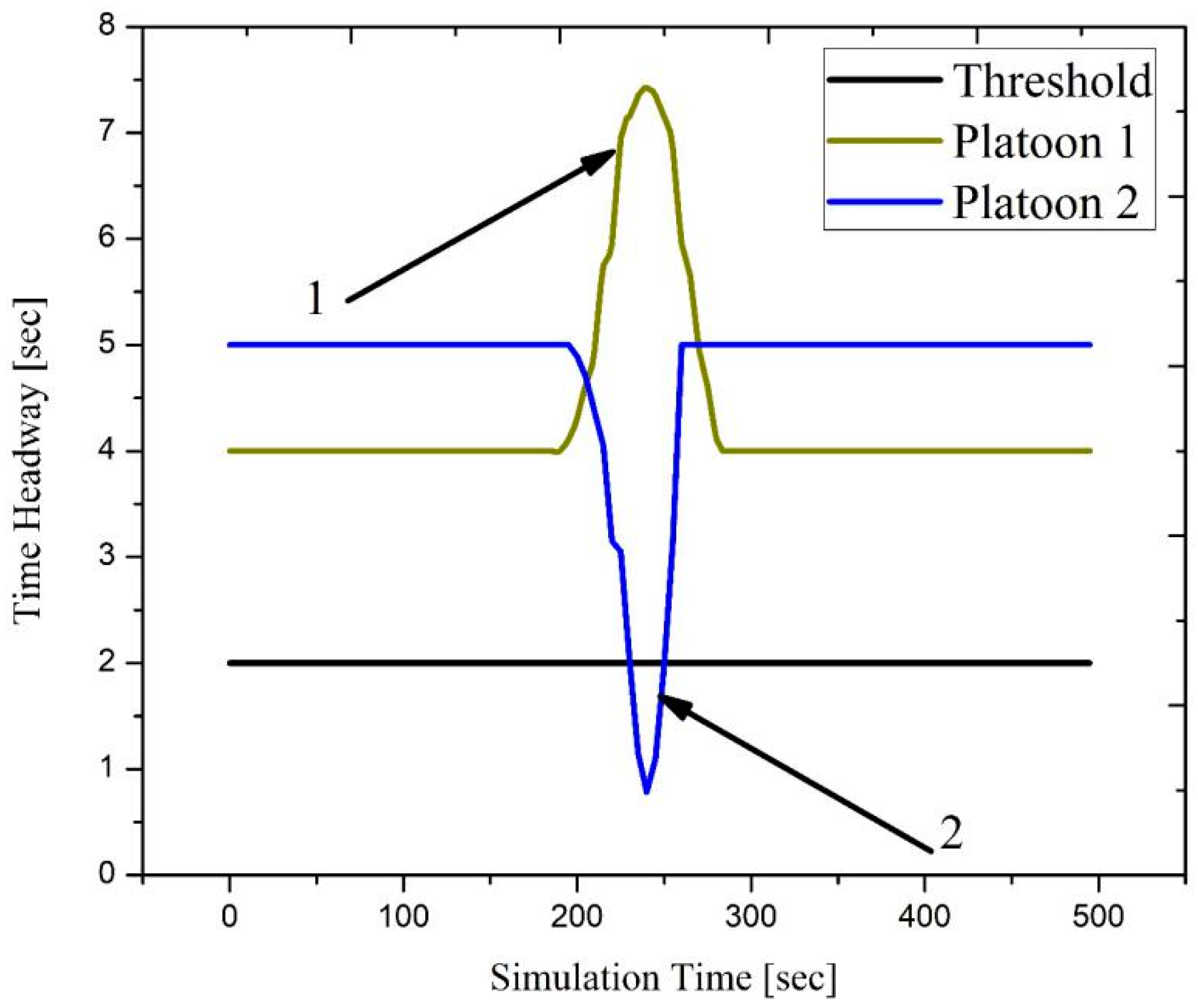
- Platoon control message: This message is multicast to all platoon vehicles to control the moving speed during platoon disturbance. The proposed technique tries to retain constant headway by acceleration or declaration to accomplish maneuvers. As long as T is significant or lower than some predefined threshold τ0 (for instance, τ0 = 2), the proposed approach starts broadcasting the platoon control messages and estimating the moving speed vest to maintain a constant inter-platoon time headway.
3.2. Dynamic Platoon Management
4. Results
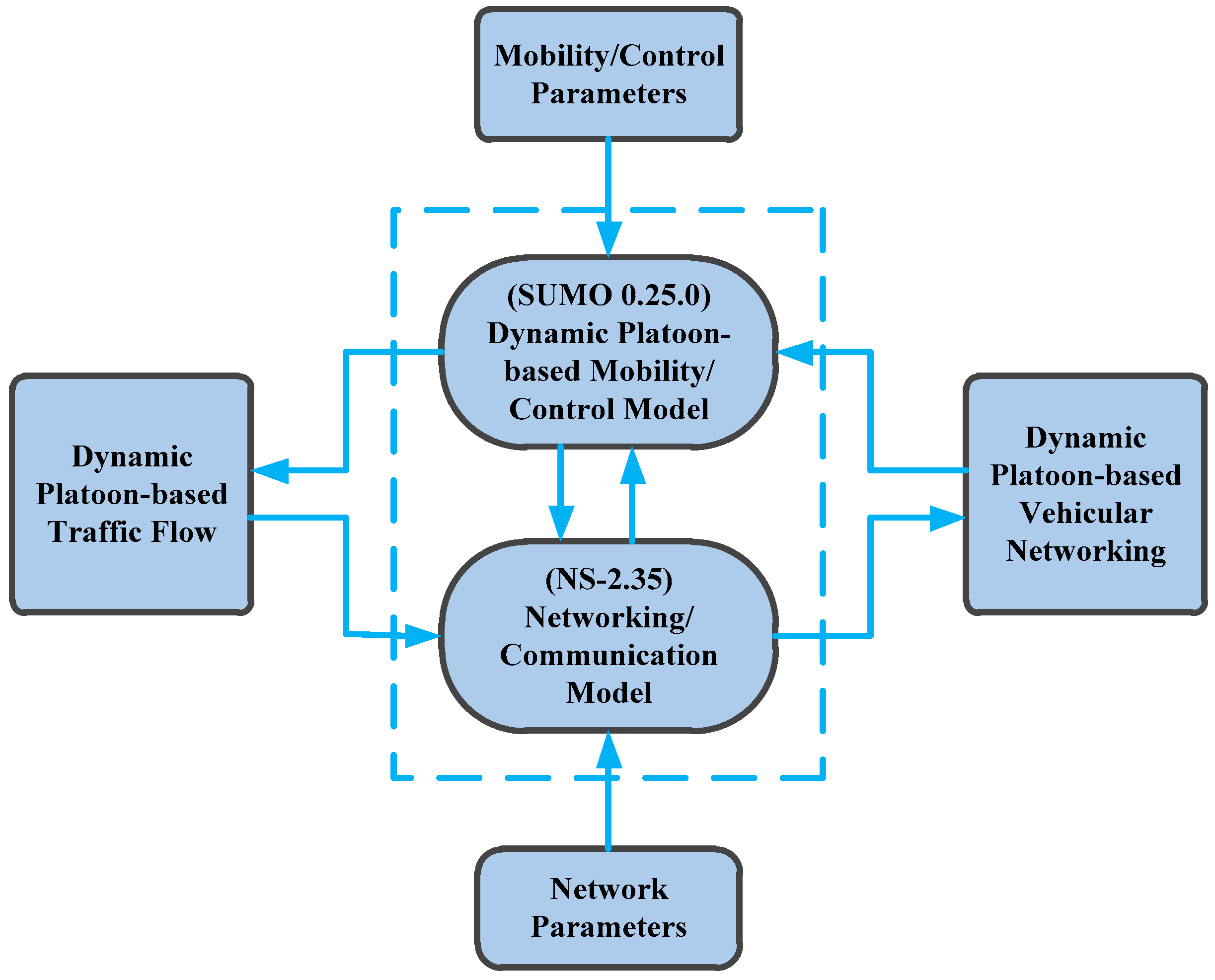
4.1. Environment Setup
4.2. Platoon Stability Analysis
4.3. Dynamic Platoon Management Analysis
5. Discussion and Challenges
5.1. Relevant Discussion
5.2. Challenges
6. Conclusions and Future Direction
Author Contributions
Funding
Conflicts of Interest
References
- Iliashenko, O.; Iliashenko, V.; Lukyanchenko, E. Big data in transport modelling and planning. Transp. Res. Procedia 2021, 54, 900–908. [Google Scholar] [CrossRef]
- Lim, H.S.M.; Taeihagh, A. Autonomous vehicles for smart and sustainable cities: An in-depth exploration of privacy and cybersecurity implications. Energies 2018, 11, 1062. [Google Scholar] [CrossRef] [Green Version]
- Goli, M.; Eskandarian, A. Eskandarian. Merging strategies, trajectory planning and controls for platoon of connected, and autonomous vehicles. Int. J. Intell. Transp. Syst. Res. 2020, 18, 153–173. [Google Scholar]
- Michal, S.; Vladimir, V.; Marcin, R.; Pawel, S.; Adrian, L.; Karolina, L.; Krzysztof, W. Communication aspects of a modified cooperative adaptive cruise control algorithm. IEEE Trans. Intell. Transp. Syst. 2019, 20, 4513–4523. [Google Scholar]
- Wang, L.; Ye, F.; Liu, Y.; Wang, Y. Evaluating traffic flow effects of cooperative adaptive cruise control based on enhanced microscopic simulation. In Proceedings of the 2020 Forum on Integrated and Sustainable Transportation Systems (FISTS), Delft, The Netherlands, 3–5 November 2020. [Google Scholar]
- Kavathekar, P.; Chen, Y.P. Vehicle platooning: A brief survey and categorization. In Proceedings of the 7th ASME/IEEE International Conference MESA/ASME IDETC/CIE, Washington DC, USA, 28–31 August 2011; pp. 1–17. [Google Scholar]
- Ali, S.M.; Goksad, E.I.; Berk, C.H. Analyzing network-wide effects of cooperative adaptive cruise control without traffic signal control at intersections. In Proceedings of the International Conference on Computer Aided Systems Theory, Cham, Switzerland, 17–22 February 2019; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Taleb, T.; Benslimane, A.; Letaief, K.B. Toward an Effective Risk- Conscious and Collaborative Vehicular Collision Avoidance System. IEEE Trans. Veh. Technol. 2010, 59, 1474–1486. [Google Scholar] [CrossRef]
- Khan, Z.; Fan, P.; Fang, S. On the connectivity of vehicular ad hoc network under various mobility scenarios. IEEE Access 2017, 5, 22559–22565. [Google Scholar] [CrossRef]
- Ahmad, M.; Chen, Q.; Khan, Z. Microscopic congestion detection protocol in vanets. J. Adv. Transp. 2018, 2018, 6387063. [Google Scholar] [CrossRef]
- Ahmad, M.; Chen, Q.; Khan, Z.; Ahmad, M.; Khurshid, F. Infrastructure-based vehicular congestion detection scheme for V2I. Int. J. Commun. Syst. 2019, 32, e3877. [Google Scholar] [CrossRef]
- Khan, Z.; Koubaa, A.; Farman, H. Smart route: Internet-of-vehicles (iov)-based congestion detection and avoidance (iov-based cda) using rerouting planning. Appl. Sci. 2020, 10, 4541. [Google Scholar] [CrossRef]
- Zhang, Y.; Cao, G. V-PADA: Vehicle-platoon-aware data access in VANETs. IEEE Trans. Veh. Technol. 2011, 60, 2326–2339. [Google Scholar] [CrossRef] [Green Version]
- Khan, Z.; Koubaa, A. SmartFlow: An adaptive congestion avoidance protocol for smart transportation systems. In Proceedings of the 2020 International Wireless Communications and Mobile Computing (IWCMC), Limassol, Cyprus, 15–19 June 2020; pp. 1535–1540. [Google Scholar]
- Fernandes, P.; Nunes, U. Platooning with IVC-enabled autonomous vehicles: Strategies to mitigate communication delays, improve safety and traffic flow. IEEE Trans. Intell. Transp. Syst. 2012, 13, 91–106. [Google Scholar] [CrossRef]
- Karoui, O.; Khalgui, M.; Koubâa, A.; Guerfala, E.; Li, Z.; Tovar, E. Dual mode for vehicular platoon safety: Simulation and formal verification. Information Sciences. 2017, 402, 216–232. [Google Scholar] [CrossRef]
- Amoozadeh, M.; Deng, H.; Chuah, C.N.; Zhang, H.M.; Ghosal, D. Platoon management with cooperative adaptive cruise control enabled by VANET. Veh. Commun. 2015, 2, 110–123. [Google Scholar] [CrossRef] [Green Version]
- Fernandes, P.; Nunes, U. Platooning of autonomous vehicles with intervehicle communications in SUMO traffic simulator. In Proceedings of the 2010 13th International IEEE Intelligent Transportation Systems (ITSC), Funchal, Portugal, 19–22 September 2010. [Google Scholar]
- Baskar, L.D.; De, S.B.; Hellendoorn, J.; Papp, Z. Traffic control and intelligent vehicle highway systems: A survey. IET Intell. Transp. Syst. 2011, 5, 38–52. [Google Scholar] [CrossRef] [Green Version]
- Varotto, S.F.; Farah, H.; Bogenberger, K.; Arem, B.V.; Hoogendoorn, S.P. Adaptations in driver behaviour characteristics during control transitions from full-range Adaptive Cruise Control to manual driving: An on-road study. Transp. A Transp. Sci. 2020, 16, 776–806. [Google Scholar] [CrossRef]
- Nava, D.; Panzani, G.; Zampieri, P.; Savaresi, S.M. A personalized Adaptive Cruise Control driving style characterization based on a learning approach. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019. [Google Scholar]
- Zohdy, I.H.; Rakha, H.A. Intersection management via vehicle connectivity: The intersection cooperative adaptive cruise control system concept. J. Intell. Transp. Syst. 2016, 20, 17–32. [Google Scholar] [CrossRef]
- Tsugawa, S.; Kato, S.; Aoki, K. An automated truck platoon for energy saving. In Proceedings of the 2011 IEEE/RSJ International Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Tapani, A. Vehicle trajectory impacts of adaptive cruise control. J. Intell. Transp. Syst. 2012, 16, 36–44. [Google Scholar] [CrossRef] [Green Version]
- Hu, L.; Wang, H.; Zhao, Y. Performance analysis of DSRC-based vehicular safety communication in imperfect channels. IEEE Access 2020, 8, 107399–107408. [Google Scholar] [CrossRef]
- Eiza, M.H.; Ni, Q.; Owens, T.; Min, G. Investigation of routing reliability of vehicular ad hoc networks. EURASIP J. Wirel. Commun. Netw. 2013, 179, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Neelakantan, P.C.; Babu, A.V. Network connectivity probability of linear vehicular ad-hoc networks on two-way street. Commun. Netw. 2012, 4, 332–341. [Google Scholar] [CrossRef] [Green Version]
- Yousefi, S.; Altman, E.; El-Azouzi, R.; Fathy, M. Analytical model for connectivity in vehicular ad-hoc networks. IEEE Veh. Technol. 2008, 57, 3341–3356. [Google Scholar] [CrossRef]
- Brémaud, P. Markov Chains: Gibbs Fields, Monte Carlo Simulation, and Queues; Springer Science & Business Media: New York, NY, USA, 2013. [Google Scholar]
- Shiomi, Y.; Yoshii, T.; Kitamura, R. Platoon-based traffic flow model for estimating breakdown probability at single-lane expressway bottlenecks. Transp. Res. Part B Methodol. 2011, 45, 1314–1330. [Google Scholar] [CrossRef] [Green Version]
- A. Ghaleb, F.; Saeed, F.; Al-Sarem, M.; Ali Saleh Al-rimy, B.; Boulila, W.; Eljialy, A.E.M.; Aloufi, K.; Alazab, M. Misbehavior-aware on-demand collaborative intrusion detection system using distributed ensemble learning for VANET. Electronics 2020, 9, 1411. [Google Scholar] [CrossRef]
- Abbas, F.; Fan, P.; Khan, Z. A novel low-latency V2V resource allocation scheme based on cellular V2X communications. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2185–2197. [Google Scholar] [CrossRef]
- Khan, Z.; Fan, P. A multi-hop moving zone (MMZ) clustering scheme based on cellular-V2X. China Commun. 2018, 15, 55–66. [Google Scholar] [CrossRef]
- Khan, Z.; Fan, P.; Abbas, F.; Chen, H.; Fang, S. Two-level cluster-based routing scheme for 5G V2X communication. IEEE Access 2019, 7, 16194–16205. [Google Scholar] [CrossRef]
- Abbas, F.; Liu, G.; Khan, Z.; Zheng, K.; Fan, P. Clustering based resource management scheme for latency and sum rate optimization in V2X networks. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019. [Google Scholar]
- Jemmali, M.; Denden, M.; Boulila, W.; Jhaveri, R.H.; Srivastava, G.; Gadekallu, T.R. A novel model based on window-pass preferences for data-emergency-aware scheduling in computer networks. IEEE Trans. Ind. Inform. 2022, 1. [Google Scholar] [CrossRef]
- Safaei, M.; Driss, M.; Boulila, W.; Sundararajan, E.A.; Safaei, M. Global outliers detection in wireless sensor networks: A novel approach integrating time-series analysis, entropy, and random forest-based classification. Softw. Pract. Exp. 2022, 52, 277–295. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Content | Description |
|---|---|
| V_ID | Vehicle identifier |
| Session Time Ts | Message generation time |
| Speed S | Vehicle’s speed (Read from odometer) |
| Direction d | Vehicle’s direction (Obtained from Navigator system) |
| Acceleration a | Rate of change of vehicle speed (Read from odometer) |
| Platoon ID Pid | Platoon identity on highway |
| Position p | Vehicle’s Position (GPS) |
| Road Type H | Obtained from Transportation Department |
| Constant Time headway | Desire time headway |
| Vl | Vehicle length |
| Parameter | Value |
|---|---|
| Safety headway | τ0 = 2 |
| Transmission range | DSRCrange = 1000 m |
| Vehicle’s length | Car_length = 5 m, Bus_length = 10 m |
| Number of lanes | 2 |
| Number of vehicles | 50 to 250 randomly generated |
| Speed limit | 100 km/h |
| Simulation runs | 50 |
| Simulation time | 500 s |
| Propagation model | Two ray ground |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad, M.; Khan, Z.; Koubaa, A.; Boulila, W. A Microscopic Platoon Stability Model Using Vehicle-to-Vehicle Communication. Electronics 2022, 11, 1994. https://doi.org/10.3390/electronics11131994
Ahmad M, Khan Z, Koubaa A, Boulila W. A Microscopic Platoon Stability Model Using Vehicle-to-Vehicle Communication. Electronics. 2022; 11(13):1994. https://doi.org/10.3390/electronics11131994
Chicago/Turabian StyleAhmad, Mushtaq, Zahid Khan, Anis Koubaa, and Wadii Boulila. 2022. "A Microscopic Platoon Stability Model Using Vehicle-to-Vehicle Communication" Electronics 11, no. 13: 1994. https://doi.org/10.3390/electronics11131994
APA StyleAhmad, M., Khan, Z., Koubaa, A., & Boulila, W. (2022). A Microscopic Platoon Stability Model Using Vehicle-to-Vehicle Communication. Electronics, 11(13), 1994. https://doi.org/10.3390/electronics11131994