
High-Accuracy 3D Contour Measurement by Using the Quaternion Wavelet Transform Image Denoising Technique


Abstract
:1. Introduction
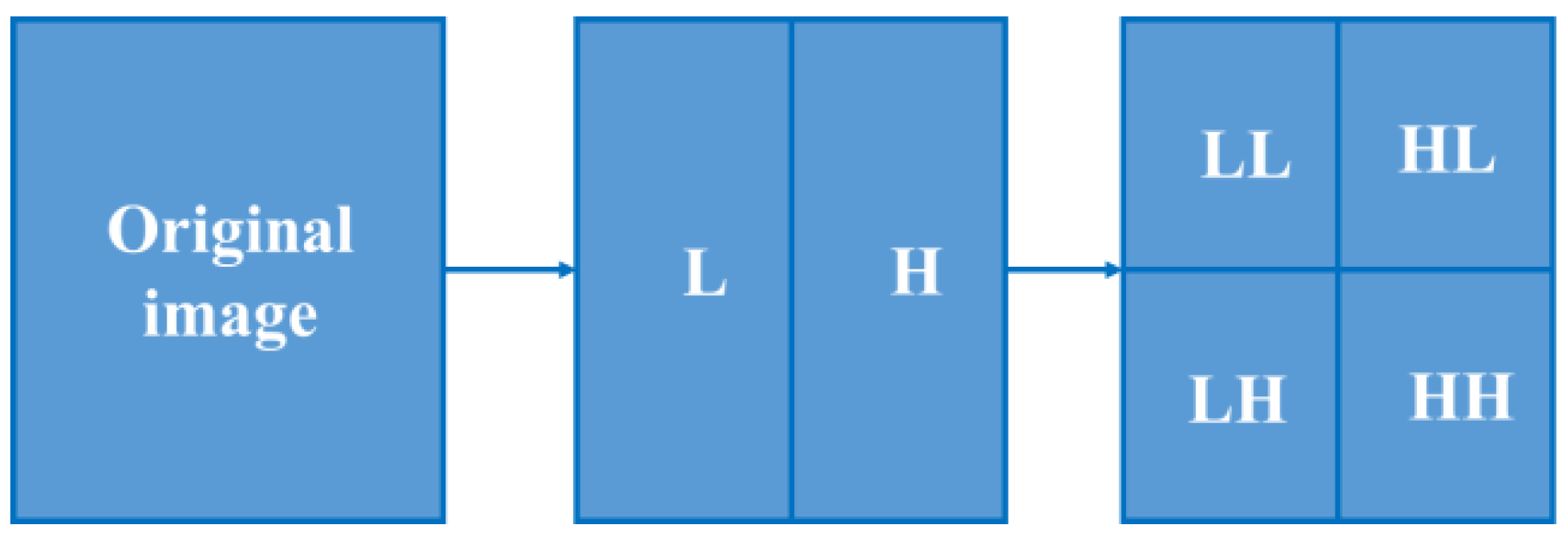
2. Structured Light Measurement System and QWT Denoising Algorithm

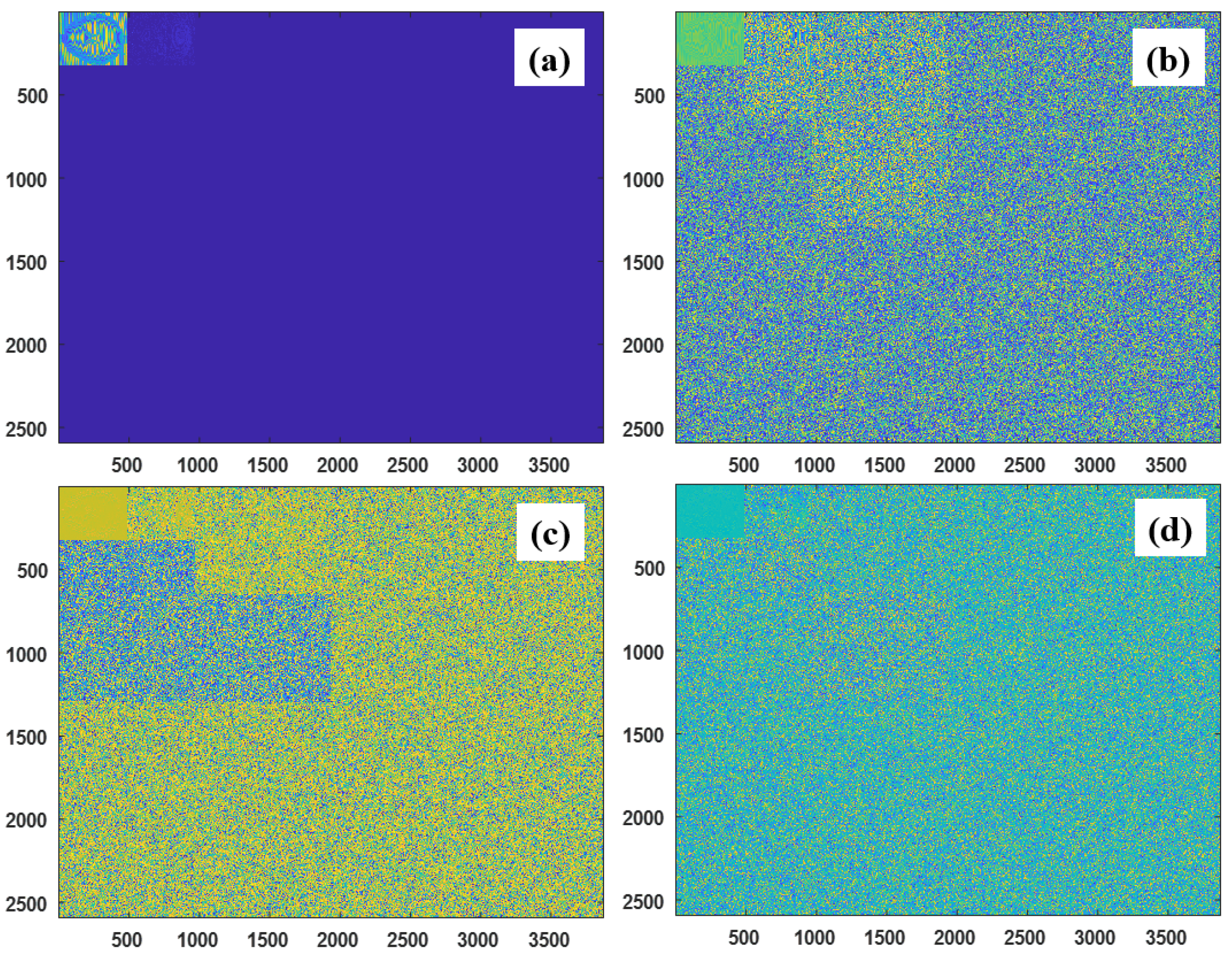
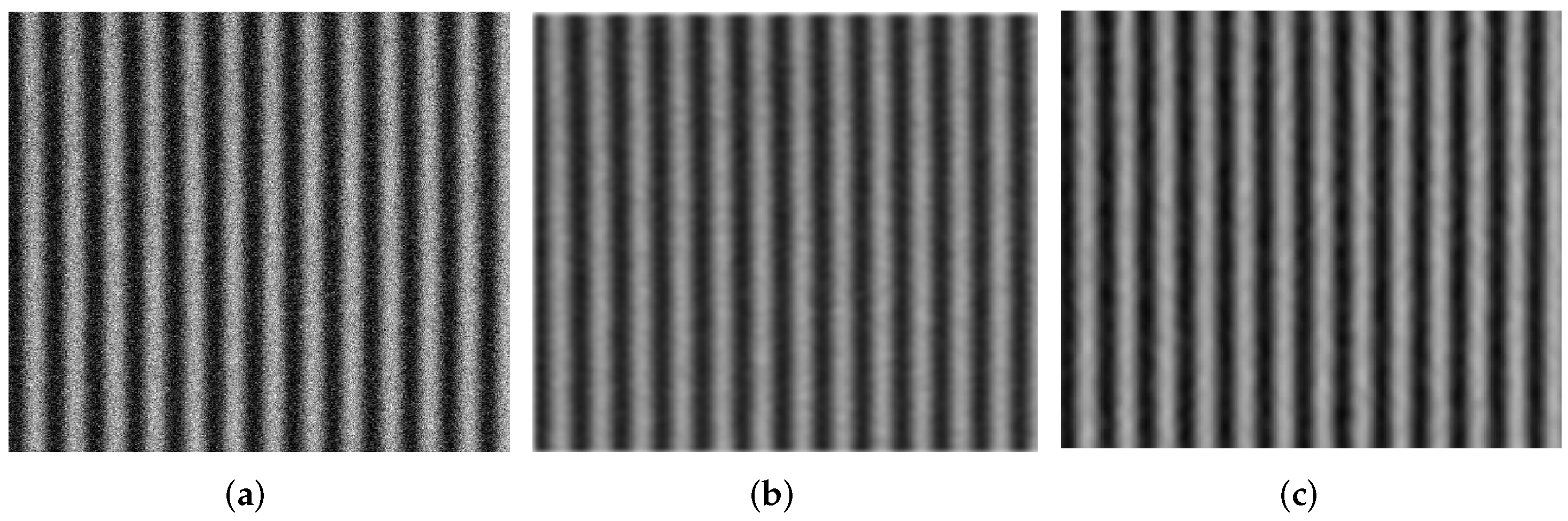
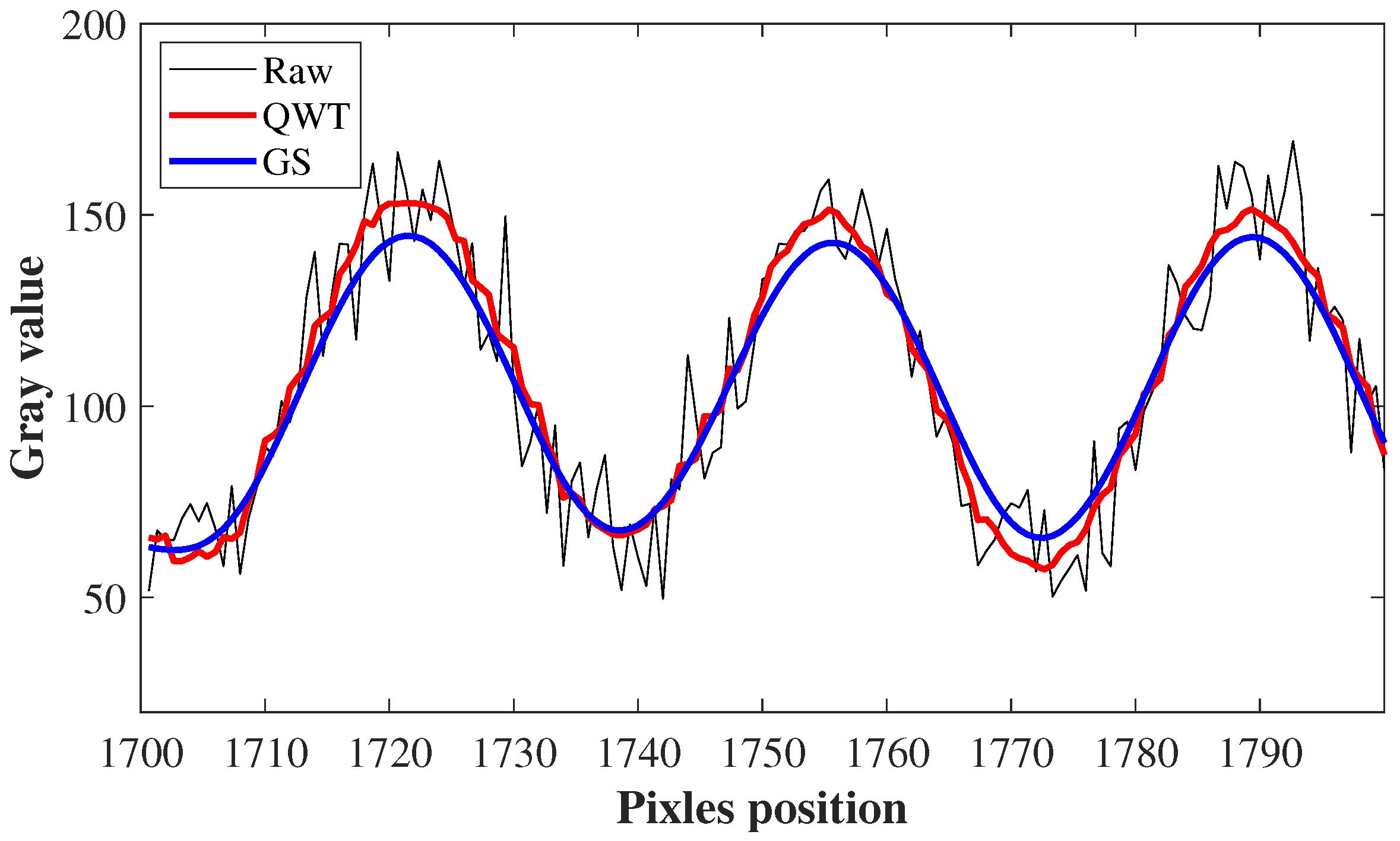
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stickland, M.; McKay, S.; Scanlon, T. The development of a three dimensional imaging system and its application in computer aided design workstations. Mechatronics 2003, 13, 521–532. [Google Scholar] [CrossRef]
- Xinmin, L.; Zhongqin, L.; Tian, H.; Ziping, Z. A study of a reverse engineering system based on vision sensor for free-form surfaces. Comput. Ind. Eng. 2001, 40, 215–227. [Google Scholar] [CrossRef]
- Spagnoloa, G.S.; Ambrosinib, D.; Paolettib, D.; Accardoc, G. Fibre optic projected fringes for monitoring marble surface status. J. Cult. Herit. 2000, 1, S337–S343. [Google Scholar] [CrossRef]
- Tepper, O.M.; Small, K.; Rudolph, L.; Choi, M.; Karp, N. Virtual 3-dimensional modeling as a valuable adjunct to aesthetic and reconstructive breast surgery. Am. J. Surg. 2006, 192, 548–551. [Google Scholar] [CrossRef] [PubMed]
- Jarvis, R.A. A Laser Time-of-Flight Range Scanner for Robotic Vision. IEEE Trans. Pattern Anal. Mach. Intell. 1983, 5, 505–512. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Wang, Y.; Wang, J.; Yao, H.; Liu, X.; Gao, R.; Yang, L.; Xu, H.; Zhang, Q.; Ma, P.; et al. Convolutional Neural Network-Aided DP-64 QAM Coherent Optical Communication Systems. J. Light. Technol. 2022, 40, 2880–2889. [Google Scholar] [CrossRef]
- Jalkio, J.A.; Kim, R.C.; Case, S.K. Three Dimensional Inspection Using Multistripe Structured Light. Opt. Eng. 1985, 24, 966–974. [Google Scholar] [CrossRef]
- Qian, J.; Feng, S.; Tao, T.; Hu, Y.; Liu, K.; Wu, S.; Chen, Q.; Zuo, C. High-resolution real-time 360 3D model reconstruction of a handheld object with fringe projection profilometry. Opt. Lett. 2019, 44, 5751–5754. [Google Scholar] [CrossRef] [PubMed]
- Wu, G.; Wu, Y.; Li, L.; Liu, F. High-resolution few-pattern method for 3D optical measurement. Opt. Lett. 2019, 44, 3602–3605. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Guo, W.; Zhang, Q. High-speed three-dimensional shape measurement based on shifting Gray-code light. Opt. Express 2019, 27, 22631–22644. [Google Scholar] [CrossRef] [PubMed]
- Yin, W.; Feng, S.; Tao, T.; Huang, L.; Trusiak, M.; Chen, Q.; Zuo, C. High-speed 3D shape measurement using the optimized composite fringe patterns and stereo-assisted structured light system. Opt. Express 2019, 27, 2411–2431. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Duan, F.J. Phase stepping methods based on PTDC for Fiber-Optic Projected-Fringe Digital Interferometry. Opt. Laser Technol. 2012, 44, 1089–1094. [Google Scholar]
- Wang, Y.; Yao, H.; Wang, J.; Xin, X. Distributed Optical Fiber Sensing System for Large Infrastructure Temperature Monitoring. IEEE Internet Things J. 2022, 9, 3333–3345. [Google Scholar] [CrossRef]
- Gai, S.; Yang, G.; Zhang, S. Multiscale texture classification using reduced quaternion wavelet transform. AEU—Int. J. Electron. Commun. 2013, 67, 233–241. [Google Scholar] [CrossRef]
- Liu, Y.; Jin, J.; Wang, Q.; Shen, Y. Phase-preserving speckle reduction based on soft thresholding in quaternion wavelet domain. J. Electron. Imaging 2012, 21, 043009. [Google Scholar] [CrossRef]
- Chai, P.; Luo, X.; Zhang, Z. Image Fusion Using Quaternion Wavelet Transform and Multiple Features. IEEE Access 2017, 5, 6724–6734. [Google Scholar] [CrossRef]
- Yin, Y.; Wu, K.; Lu, L.; Song, L.; Zhong, Z.; Xi, J.; Yang, Z. High dynamic range 3D laser scanning with the single-shot raw image of a color camera. Opt. Express 2021, 29, 43626–43641. [Google Scholar] [CrossRef]
- Zhou, P.; Zhu, J.; Xiong, W.; Zhang, J. 3D face imaging with the spatial-temporalcorrelation method using a rotary speckle projector. Appl. Opt. 2021, 60, 5925–5935. [Google Scholar] [CrossRef] [PubMed]
- Donoho, D.; Johnstone, I. Ideal Spatial Adaptation by Wavelet Shrinkage. Biometrika 1998, 81, 425–455. [Google Scholar] [CrossRef]
- Chang, S.; Yu, B.; Vetterli, M. Adaptive Wavelet Thresholding for Image Denoising and Compression. IEEE Trans. Image Process. 2000, 9, 1532–1546. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | SD for Images | SNR | SD for Mask | Thickness | Coverage | Width | Running Time |
|---|---|---|---|---|---|---|---|
| GS | 0.0282 | 11.6759 dB | 0.0239 | 0.681 mm | 1.59 mm | 160.53 mm | 16 s |
| QWT | 0.0192 | 13.3463 dB | 0.0502 | 1.99 mm | 0.47 mm | 160.01 mm | 20 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, L.; Wang, Y.; Zhang, H.; Li, C.; Xin, X. High-Accuracy 3D Contour Measurement by Using the Quaternion Wavelet Transform Image Denoising Technique. Electronics 2022, 11, 1807. https://doi.org/10.3390/electronics11121807
Fan L, Wang Y, Zhang H, Li C, Xin X. High-Accuracy 3D Contour Measurement by Using the Quaternion Wavelet Transform Image Denoising Technique. Electronics. 2022; 11(12):1807. https://doi.org/10.3390/electronics11121807
Chicago/Turabian StyleFan, Lei, Yongjun Wang, Hongxin Zhang, Chao Li, and Xiangjun Xin. 2022. "High-Accuracy 3D Contour Measurement by Using the Quaternion Wavelet Transform Image Denoising Technique" Electronics 11, no. 12: 1807. https://doi.org/10.3390/electronics11121807
APA StyleFan, L., Wang, Y., Zhang, H., Li, C., & Xin, X. (2022). High-Accuracy 3D Contour Measurement by Using the Quaternion Wavelet Transform Image Denoising Technique. Electronics, 11(12), 1807. https://doi.org/10.3390/electronics11121807