1. Introduction
With the development of ground attack aircraft, unmanned aerial vehicles, ballistic missiles and cruise missiles, air attack has become a very common means of operation in modern war. As the current air defense combat situation presents the characteristics of multiple targets and large scale, the existing combat mode based on equipment autonomous engagement has been difficult to adapt to the battlefield environment. The rational allocation of operational resources to improve interception efficiency and the reduction of operational cost have become urgent problems to be solved in air defense operations.
Spatial crowdsourcing [
1] is a mode that uses distributed artificial computing power to solve specific function sets through Internet outsourcing. It has attracted wide attention since being proposed in 2006, and is now widely used in image and video marking classification, road condition detection, text recognition, Uber, takeout food delivery and other applications [
2]. The efficient assignment of tasks to workers represents a research hotspot in the field of spatial crowdsourcing. The existing research objectives include maximizing the number of one-time task matching, realizing the optimal task scheduling scheme for a single worker, pursuing the quality and diversity of task completion, and iterating task allocation and task scheduling to maximize the number of global task allocation [
3].
Regional air defense operation refers to intercepting enemy air attack targets to protect assets. The most important intercepting targets are cruise missiles, ballistic missiles, rockets and various types of enemy aircraft, etc. Assets mainly include cities, airports, ports and other important facilities. The main objective of defense is to maximize the destruction of enemy targets or to maximize the self-protection of assets. The multiple resources and high timeliness requirements of regional air defense operation control are in line with the characteristics of collaborative intelligence and efficient processing of spatial crowdsourcing mode. At the same time, the relationship between combat units and incoming targets is highly similar to the “worker-task” relationship in spatial crowdsourcing mode. As a problem-solving framework, spatial crowdsourcing has a broad application prospect in the target allocation of regional cooperative air defense operations.
Since Manne (1957) put forward the WTA issue [
4], the study on missile assignment has been continued up to now. Matlin provided literature on missile assignment before 1970 [
5]. Soland studied the weapon target assignment of the anti-ballistic missile in area defense and point defense [
6]. Wacholder analyzed the WTA problem in ICBM defense, minimizing the residual threat to the incoming target as the target, and considering the upper limit of interceptor weapons owned by each combat unit and the upper limit of interceptor weapons assigned to a target [
7]. Liu studied the WTA problem of maximizing the interception of enemy weapons based on different kill zones with multiple target channels of the ground-to-air missile defense system, taking into account time constraints, space constraints and resource constraints [
8]. Meng analyzed the WTA problem of multi-layer ballistic missile defense systems [
9]. Wang mainly studied target assignment in air defense command and control system of the tactical unit of surface-to-air missile and proposed the concept of shooting superiority of intercepting target of firepower unit [
10]. Wang studied the WTA problem of general ballistic missile defense [
11]. Li studied the WTA problem of interception of the multi-layer incoming ballistic missiles. Multi-layer mainly refers to the high-altitude defense layer and low-altitude defense layer. The defense side launches different interceptors according to different defense layers and considers the time window when assigning interceptors [
12]. Xu studied the multi-target WTA problem under uncertain conditions based on the static perspective, to obtain the maximum interception efficiency and minimum interception loss [
13]. Li studied the WTA problem of static multi-target ground air defense to maximize the protection of assets while minimizing interceptor consumption [
14]. Jang focused on the WTA problem of intercepting enemy missiles by interceptors with high hit probability [
15]. Guo mainly studied the problem of multi-target missile interception with fixed and adaptive grouping constraints, and the grouping strategy mainly considers the limitation of the number of weapons allocated to each target [
16]. Zhang proposed a dynamic sensor/heterogeneous weapon-target integration assignment problem by extracting key factors of typical ground-air anti-penetration scenarios, that is, multiple types of near, medium, and far defense weapons and sensors are deployed to intercept the target during the penetration process of the target from far to near [
17]. The current research directions of the WTA problem mainly focus on simplifying models and assumptions that more closely resemble actual operations, multi-weapon cooperation, interception cost-effectiveness optimization, and timeliness.
Since WTA has its characteristics under different combat patterns, our research mainly studies WTA in-ground joint air defense operations. Compared with the current research on WTA issues, our research is more in-depth. In terms of problem size, our study includes large, medium, and small scales. From the perspective of complexity, our research considers the cooperation between combat units and the cooperation between combat units and sensors. In addition, the model construction takes full account of the requirements of actual application scenarios, and the complexity is further improved. From the perspective of timeliness, as it involves intercepting tactical ballistic missiles, timeliness is required to a certain extent, but in general, optimality is more important than timeliness.
In spatial crowdsourcing mode, workers usually have a relatively fixed work scope (such as a circle with their location as the center and a radius of the distance affected by many personal preferences) and can complete dynamic tasks that are influenced by personal preference. In regional air defense operations, combat units, as “workers”, are usually unable to move after completion. As a “working range of workers”, the kill zone of the combat unit has great differences in intercepting different types of incoming targets. The incoming target is a moving individual with a specific threat level as a “worker assignment”. To adapt to the target assignment of joint air defense operations, the traditional spatial crowdsourcing model needs to be improved to adapt to the target assignment of regional air defense operations.
The target assignment problem of air defense operation is an integer nonlinear multi-dimensional combinatorial optimization problem, which belongs to the non-deterministic problem (NP) [
18]. The Hungarian algorithm [
19], particle swarm algorithm [
20,
21,
22], ant colony algorithm [
23], artificial fish swarm algorithm [
24], simulated annealing algorithm [
25,
26], cuckoo algorithm [
27] and so on are widely used in solving this kind of problem. Compared with other evolutionary algorithms, particle swarm optimization bears the advantages of fewer control parameters, better convergence, and easier implementation. Because of these advantages, PSO has attracted extensive attention in the field of evolutionary computing since its introduction. As with other swarm-based stochastic optimization algorithms, PSO is initialized with a population of random solutions (position of each particle) in the search space, and subsequently begins to enter a loop to continue searching for optimal solutions by updating the particle’s velocities and positions until some termination conditions are satisfied [
28]. Thus, the methodology of generating high-quality initial particles represents a worthy research direction in the PSO field. Moreover, the proper selection of control parameters, such as inertia weight and learning factor, can significantly influence the convergence of PSO. Therefore, the current research on PSO is mainly aimed at improving the above two aspects.
For swarm initialization, Tian used two kinds of chaotic maps to improve the quality of the initial swarm for PSO with promising results [
29]. Gao offered a similar chaotic opposition-based swarm initialization [
30]. Li applied two kinds of chaotic maps to initialize the swarm in which the logistic map was for positions while the cubic map was for velocities of the particles [
31].
For parameter selection, Clerc introduced a constriction factor into the standard PSO that was a function of learning factors
and
to insure the convergence of particle swarm optimization [
32]. Ratnaweera put forward a self-organizing hierarchical particle swarm optimizer (HPSO) with time-varying acceleration coefficients (TVAC) to control the local search and convergence to the global optimum solution. Conducted experiments revealed that the performance of HPSO with TVAC was markedly better than that of HPSO with fixed learning factor [
33]. Tang brought forward a modified particle swarm optimization by exploiting the exponential time-varying acceleration coefficients [
34].
Compared with the existing spatial crowdsourcing model applied to ride-hailing and takeout delivery services, the main difficulties to be solved in this problem are as follows:
A single incoming target may be intercepted by too many combat units, which will seriously occupy combat resources.
The performance parameters of different types of combat units are quite different, combat units with better performance will be used under heavy load in conventional assignment algorithms. This would leave more economical combat units idle. Combat unit targets are not evenly distributed.
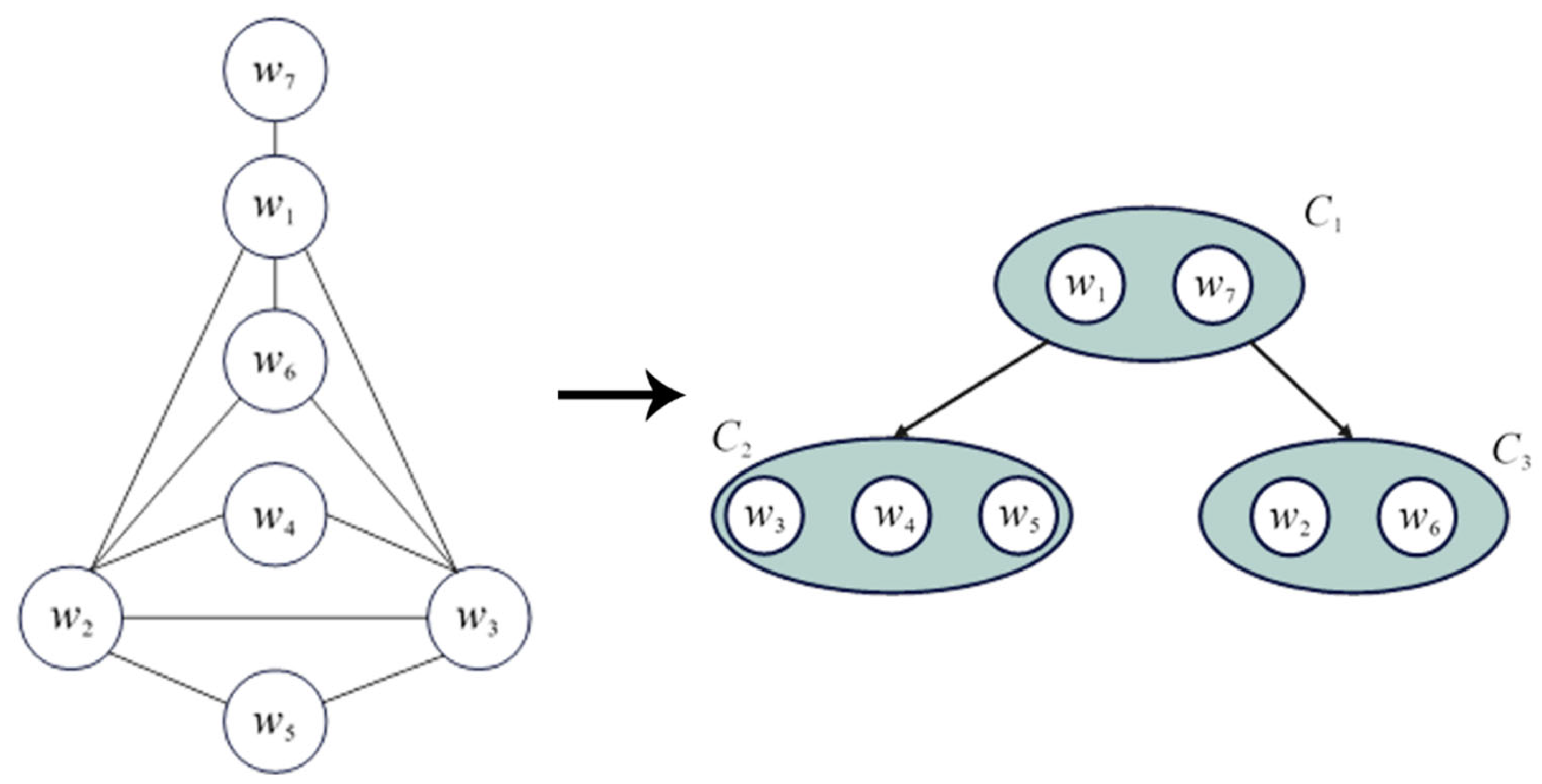
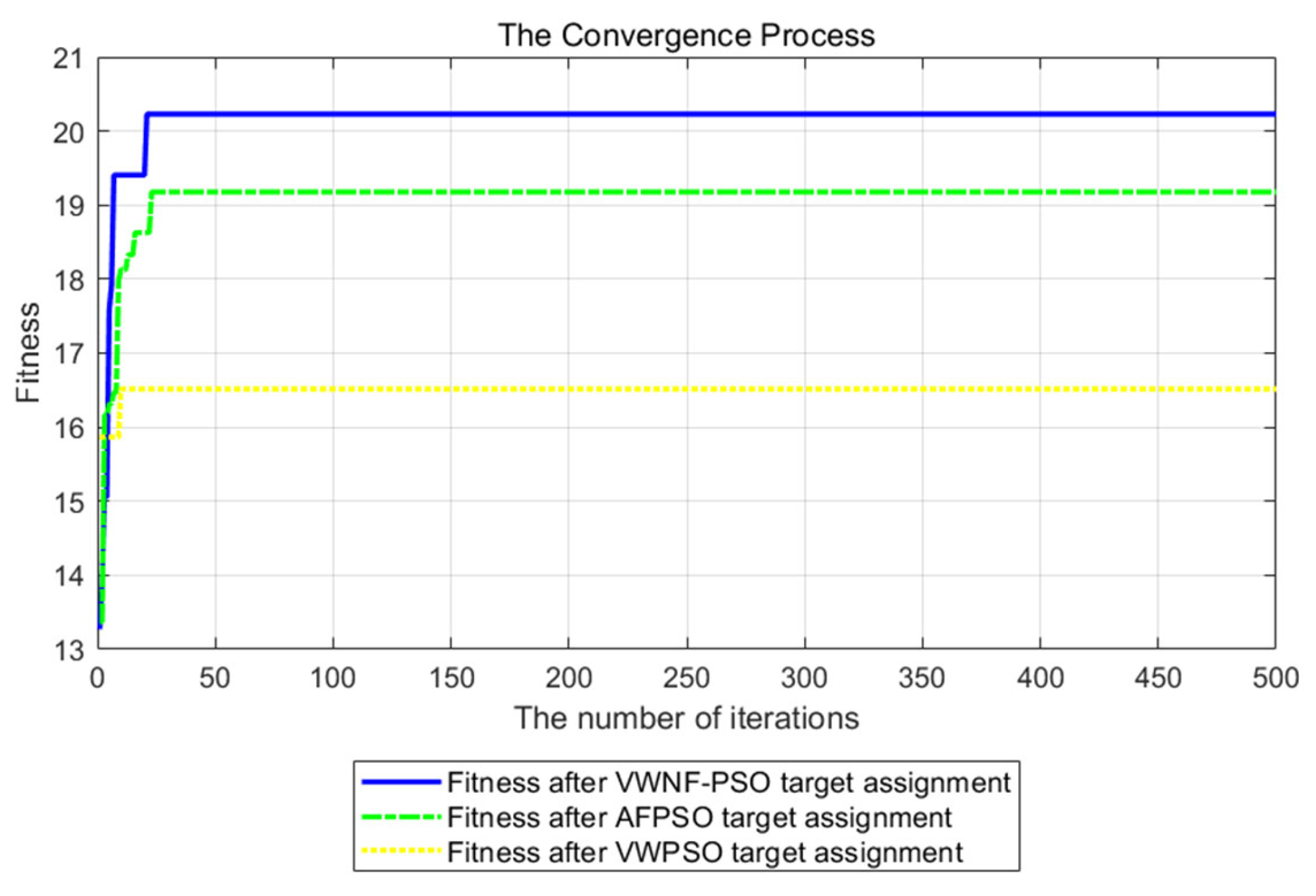
Aiming at the above difficulties, we introduce the spatial crowdsourcing theory into the weapon-target assignment problem of joint air defense operations. To adapt to the real scene and highlight the system coordination capability of joint air defense operations, according to the characteristics of the WTA problem, we establish a target allocation model of joint air defense operations based on spatial crowdsourcing mode. Firstly, we preprocess the data, and calculate the potential intercept task matrix, combat unit synergy relation diagram, and intercept mission reward matrix by combat unit data and incoming target data. Then we use the tree decomposition algorithm to segment the combat units set according to the cooperative relationship between combat units, to reduce the size of the solution space and improve the efficiency of the optimization algorithm. To solve the model, we propose a heuristic variable weight nonlinear learning factor particle swarm optimization (VWNF-PSO). We use the potential interception capability matrix to constrain the generation of the primary particles to further compress the solution space in the initialization stage, and use it to constrain the particle movement velocity to avoid the particles moving out of the solution space in the optimization stage; then we add the adaptive mutation method, calculate the mutation probability according to the particle individual fitness and population average fitness to improve the ability to jump out of local optimal; finally, we improve the algorithm inertia weight and learning factor value strategy, adjust the inertia weight timely according to the individual fitness and the average fitness of the population, adjust the learning factor by using the nonlinear cloud selection method according to the number of iterations, and improve the ability of the particles to move to the optimal solution at different stages of the search. Through the above improvements, the efficiency of the algorithm is effectively improved, and the adaptability is stronger in the face of large-scale extreme conditions.
2. Problem Definition
This paper defines regional air defense operations as a model similar to the typical spatial crowdsourcing model, including workers (combat units), requestors (incoming targets), space missions (interception missions), and platforms (command and control systems). Different combat units are equipped with interceptors of different performance. They communicate with the command and control (C2) system and other combat units through communication links, and dynamically inform the C2 system of their position, channel status, and the number of interceptors. Different combat units have different reward indicators for different incoming targets. The incoming target issues an intercept mission with a clear message. The C2 system receives all the information from the combat unit and the incoming target, and assigns the incoming target to the combat unit through the designed target assignment mechanism.
The main symbols in this paper are shown in
Table 1.
Definition 1. Combat unit.
In this paper, combat units generally refer to ground air defense units that carry out joint air defense operations in the region and are capable of intercepting incoming targets in the air. A single combat unit is defined by a five-dimensional cell array such as . is the type of combat unit. is the position of the combat unit, it includes longitude, latitude and altitude data of the combat unit. is the kill zone parameter of the combat unit. is the combat unit radar normal direction. is the high limit of the kill zone, is the low limit of the kill zone, is the far limit of the kill zone, is the near limit of the kill zone, is the maximum route angle, is the maximum high and low angle. is the minimum high and low angle, is the azimuth of the radar sector of the combat unit. is the pitching angle of the radar sector, is the radar power coefficient, is the average response time of combat units, is the number of combat unit fire channels, and is the number of combat unit interceptors.
Definition 2. Incoming target.
The incoming target is defined by a three-dimensional cell array such as . is the trajectory of the incoming target, consisting of multiple sets of longitude, latitude, and altitude data. is the characteristic parameter of the incoming target and is a two-dimensional array composed of the RCS of the incoming target and the target type. is the latest completion time of target interception task set by the command and control system according to the characteristics of the incoming target. After receiving the target intercept order, the combat unit needs to complete the intercept before the latest completion time.
Definition 3. Task sequences.
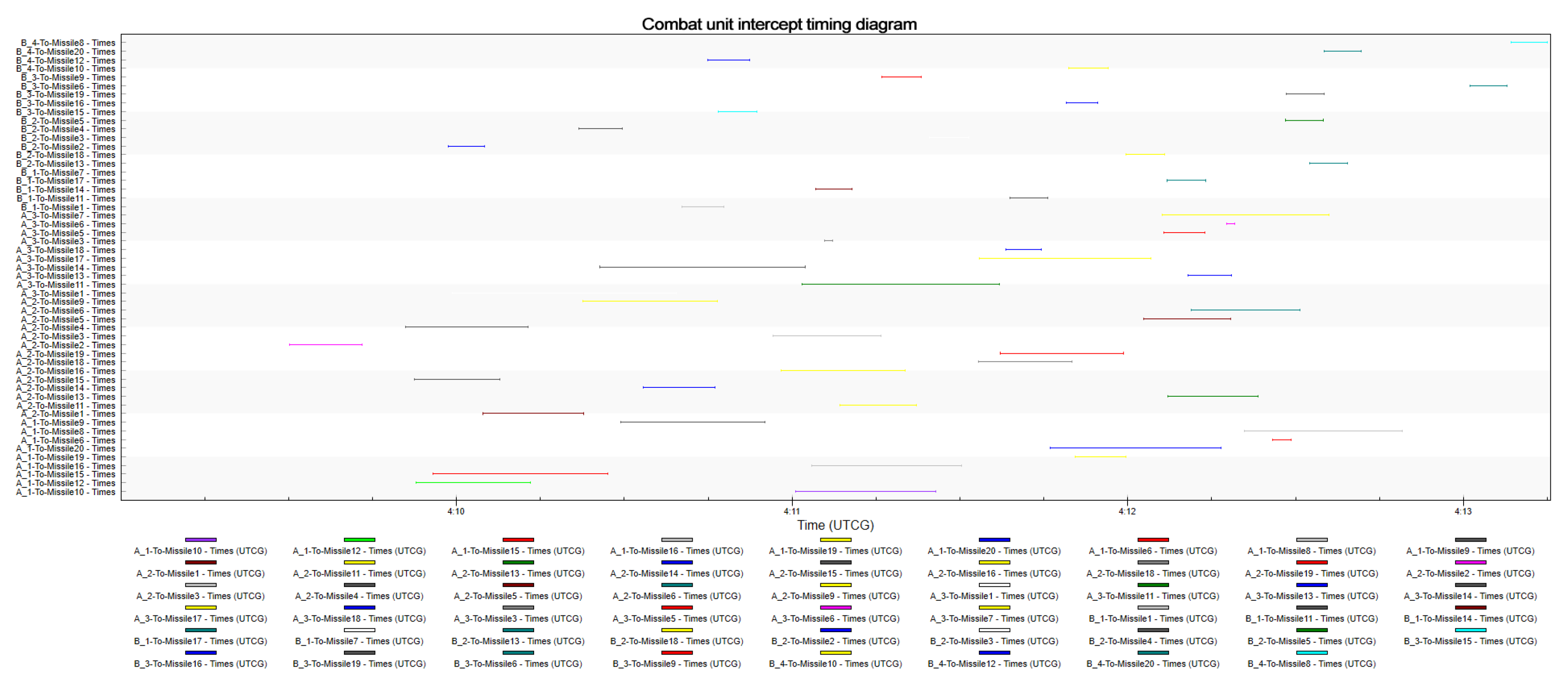
is the set of incoming targets assigned to the combat unit . is a sequential sequence of , represents the time sequence in which the combat unit intercepts the incoming target. is the time when the combat unit finishes intercepting the incoming target $tr$, and must meet the condition: .
Definition 4. Effective interception task set (ETS).
The interception task set
is called the effective intercept task set of combat unit
if and only if the following conditions hold:
Definition 5. Extremely effective interception task set (EETS).
If any superset of the effective blocking task set $T_{w}$ is not the effective intercepting task set, it is the extremely effective task set.
Definition 6. Interception task assignment.
Given the combat unit set and the incoming target set $Tr$, the intercept task assignment is . is defined as the set of interception missions assigned to all operational units.
Definition 7. Intercept mission reward metrics.
The intercept mission reward parameter refers to the interception effect parameter calculated by various factors when the combat unit completes an interception mission. According to the characteristics of combat units, the factors that need to be considered in the judgment of reward parameters are compared and screened, and the important and relatively independent factors are extracted as the basic elements for the judgment of reward parameters. In this paper, the direct assessment method is used to judge the threat mainly by the target type and supplemented by other factors.
(1) Intercept arc length (time parameter)
The longer the target passes through the kill zone of the combat unit, the more likely the combat unit will capture and intercept it successfully, and the higher the success rate of interception. Normalized, the duration of the target passing through the kill zone to obtain the intercept arc length parameters of the incoming target:
In this formula, is the time for the incoming target to pass through the kill zone of combat unit . and are the minimum and maximum arc lengths of intercepting all incoming targets by combat unit , respectively.
(2) The target type
For different types of targets, their flight speed and attack capability are different, and therefore their threat level is different. Usually, according to the threat degree, the order is anti-radiation missile, typical target, slow target, cruise missile target, and jamming target. The target type parameter function is:
(3) Electronic jamming
When the enemy carries out an air raid, they usually add electronic jamming equipment to the air raid weapon to improve its penetration ability. The purpose of jamming:
Disturbing the search radar, affects the ability of radar to detect the target, so that it cannot receive the correct information about the target;
Jamming the tracking guidance radar in the surface-to-air missile weapon system makes it unable to track the target effectively;
Interferes with the on-board electronic equipment of surface-to-air missile to make the missile lose control and reduce the hit probability;
Destroying ground air defense weapons directly to render it incapable of anti-aircraft operations.
The parameter function of electronic interference capability is:
According to the calculation of the above function, the comprehensive attribute parameter of target
is given by the above formula:
The weight vector composed of each weight value is:
According to the influence of each attribute factor on the threat degree, the comprehensive target attribute parameters can be obtained by integrating the weights set by experts.
- 2.
Combat unit adaptability parameters
(1) Combat unit effectiveness indicators
Since the effectiveness of combat units in intercepting different incoming targets is different, when setting the reward mechanism, it is necessary to introduce the effectiveness index of combat units based on the evaluation of incoming target attribute parameters, which is given by experts according to combat unit type and incoming target type .
(2) Interceptor cost penalty
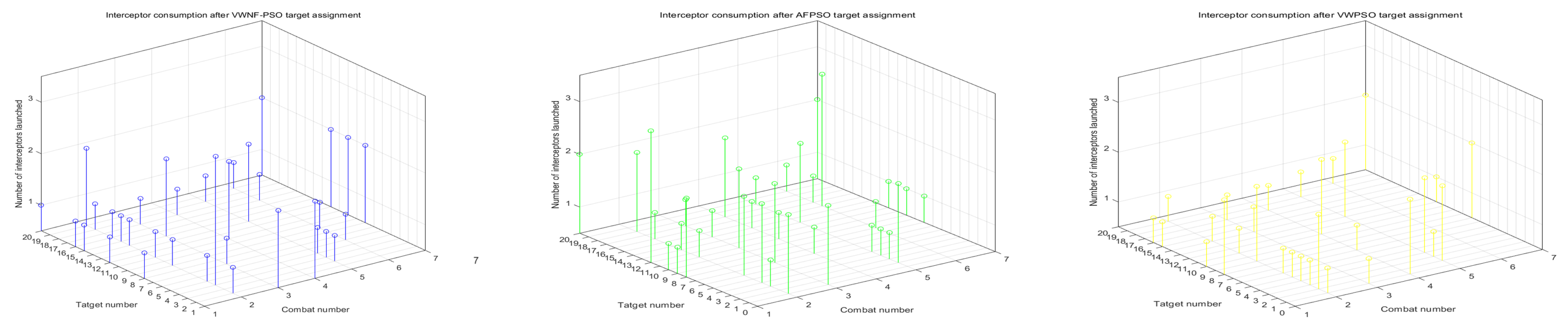
To avoid excessive consumption of interceptors and maximize the benefits of air defense operations, it is necessary to set the penalty parameter for the consumption of interceptors. If the combat unit fires n interceptors, its total penalty parameter is: .
The combat unit adaptability parameter is: .
Finally, the elements of the intercept mission reward matrix
are:
Problem definition:
The problem is to find the task allocation problem in the crowd-sourcing mode based on the reward mechanism under the limitation of the latest completion time of the target interception task and the number of interceptors of the combat unit, under the condition that the combat unit set and the incoming target set are determined. The objective is to find a globally optimal task assignment scheme to achieve . represents all target assignment schemes, and represents the total value of reward parameters for this target assignment scheme.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}