
An Adaptive Threshold Line Segment Feature Extraction Algorithm for Laser Radar Scanning Environments

Abstract
:1. Introduction
2. Line Segment Feature Extraction
2.1. Noise Reduction of Radar Data
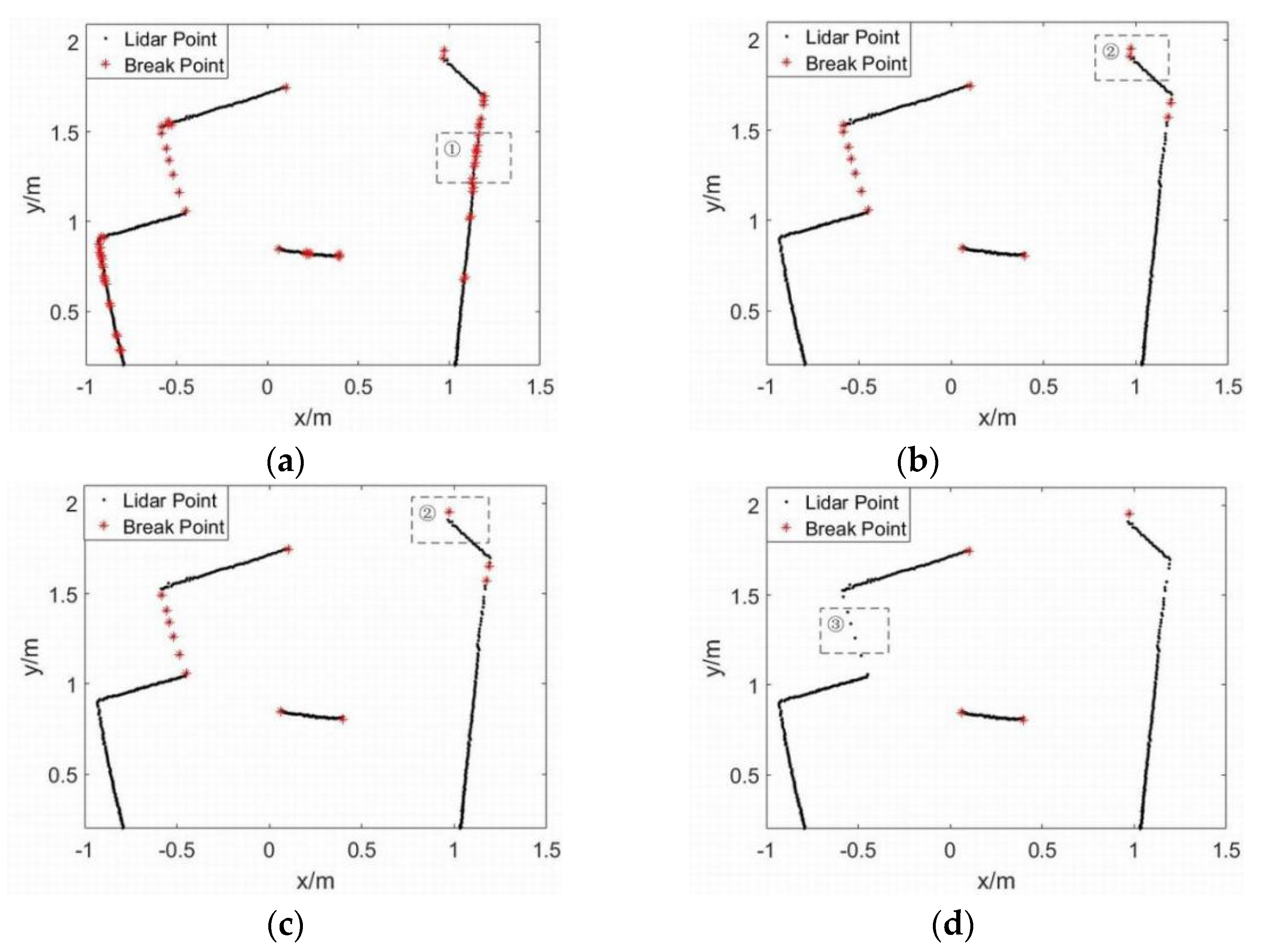
2.2. Breakpoint Detection of Adaptive Nearest Neighbor Algorithm
2.3. Adaptive Threshold Segmentation
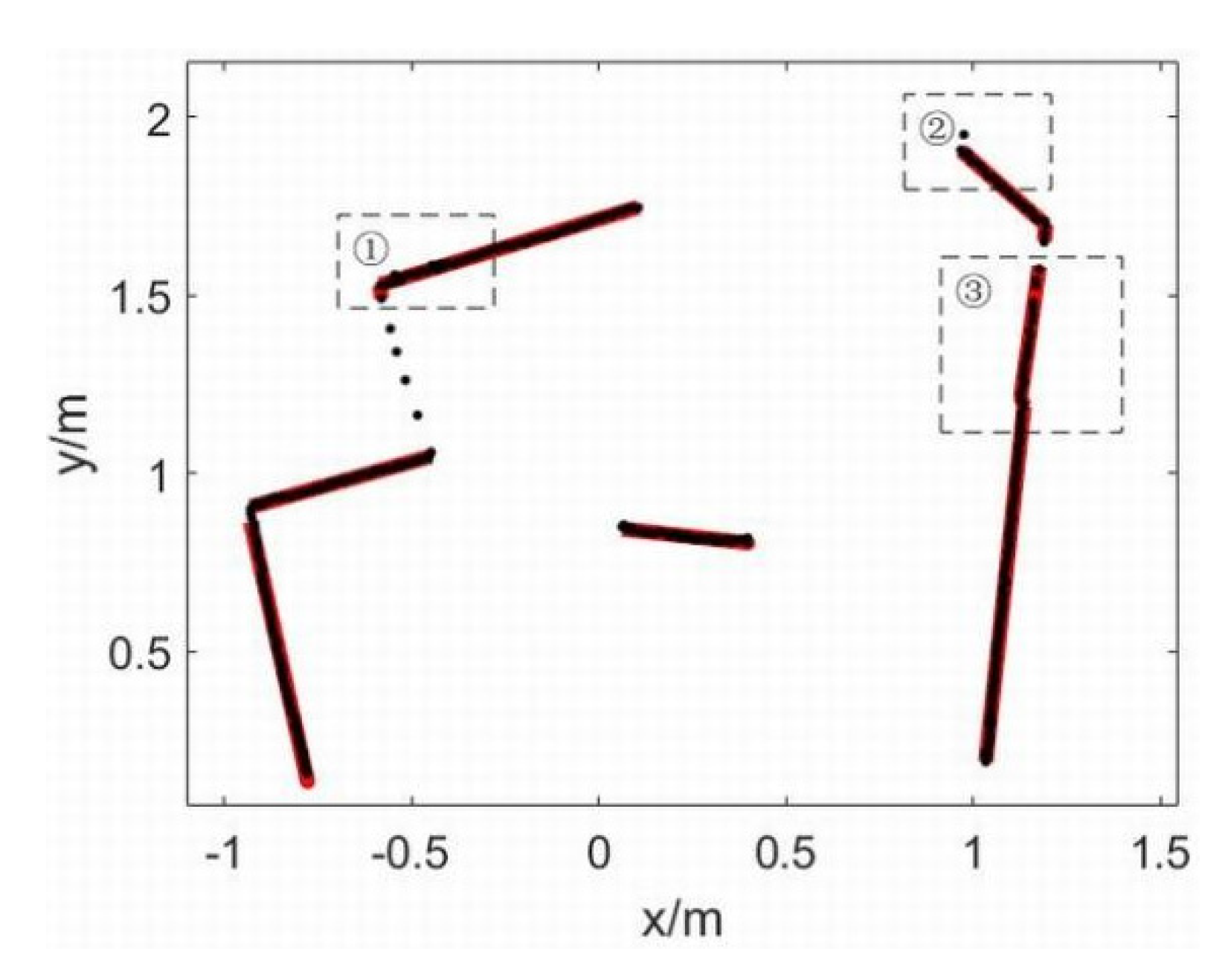
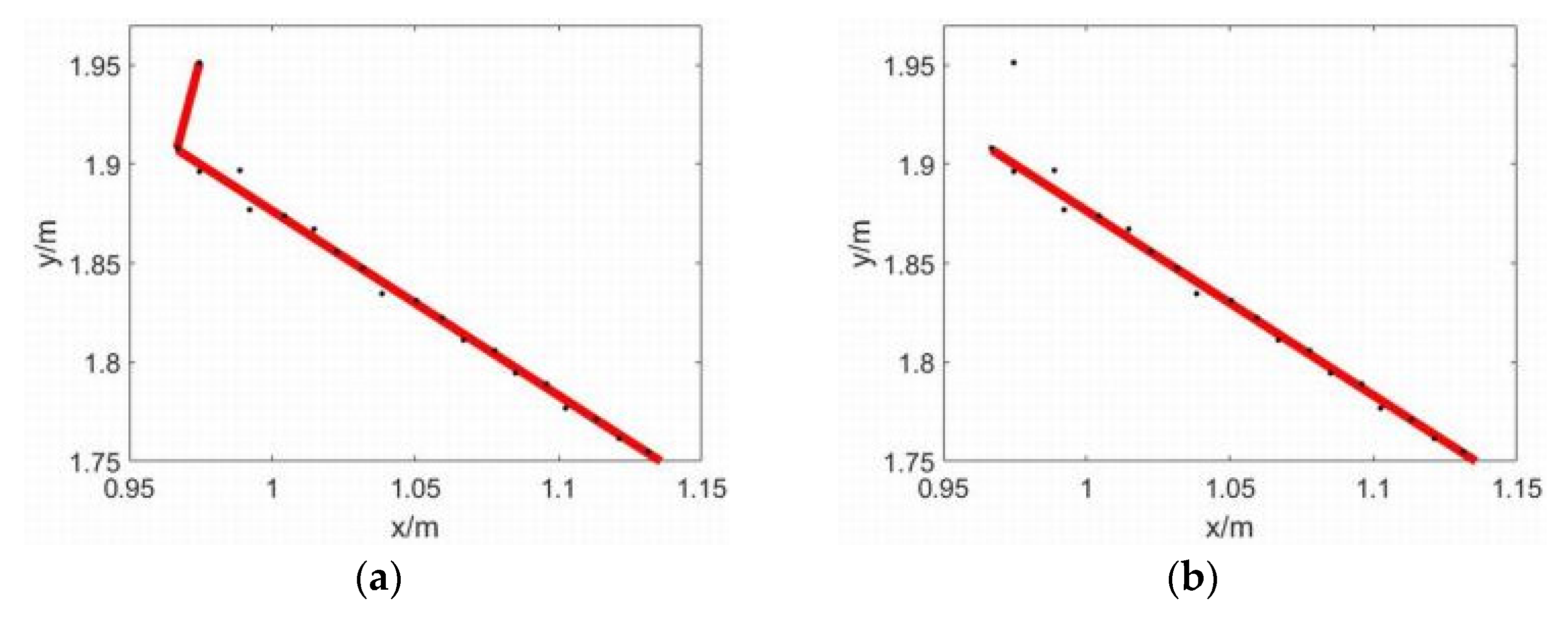
2.4. Piecewise Fitting of Point Set
3. Detailed Description of the Algorithm
4. Discussion and Results
4.1. Open Source Dataset Simulation
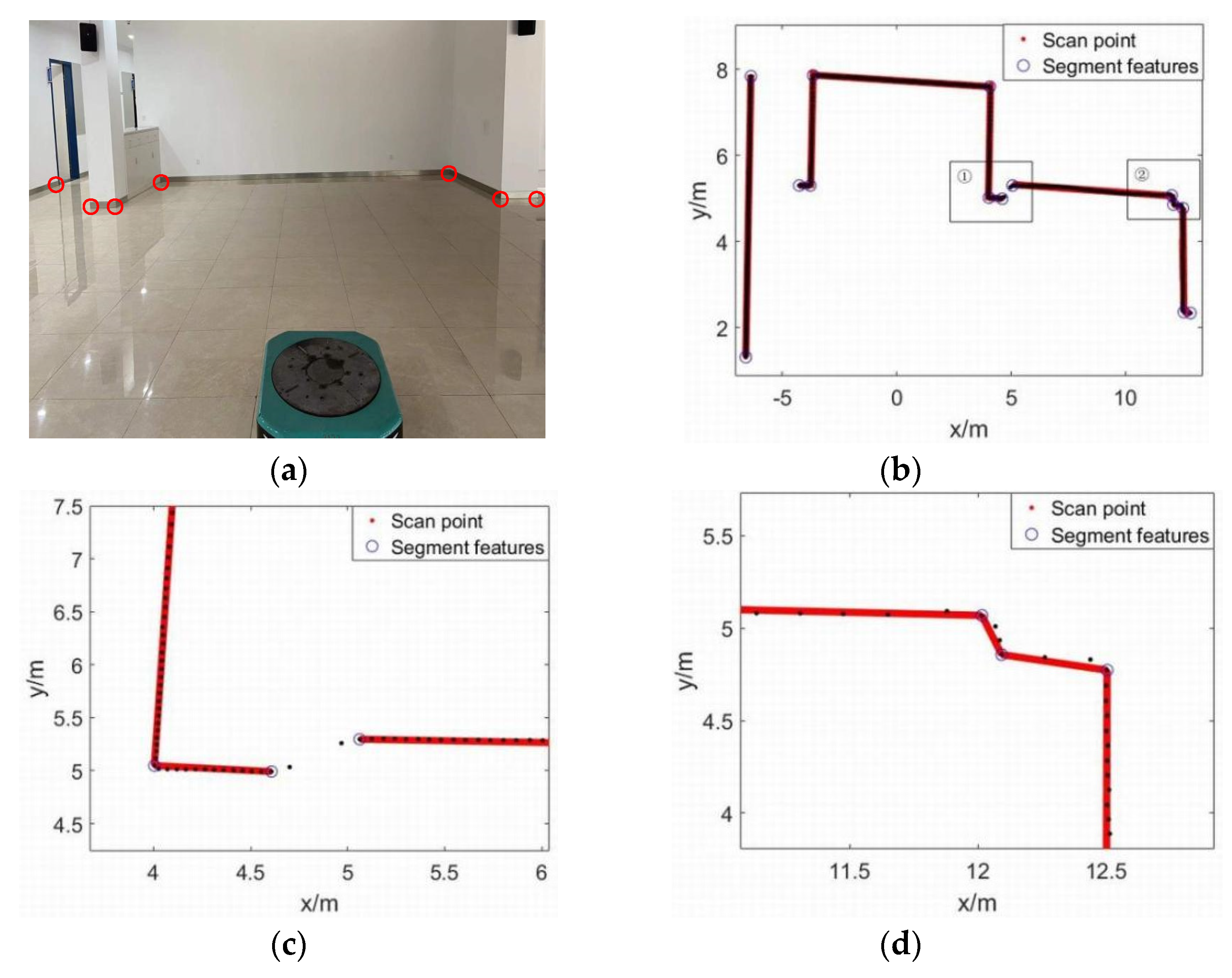
4.2. Real Environment Simulation
4.3. Fitting Contrast
4.4. Calculation of Environmental Similarity
4.5. Feature Point Extraction Results and Algorithm Time
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hui, Y.; Hao, Y.G.; Liu, J.M. Research on Multi-sensor Image Matching Algorithm Based on Improved Line Segments Feature. In Itm Web of Conferences; EDP Sciences: Les Ulis, France, 2017; Volume 11, p. 05001. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Zhang, J. An Improved Automatic Shape Feature Extraction Method Based on Template Matching. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2021; Volume 2095. [Google Scholar] [CrossRef]
- Zhao, Q. Research on Real-Time Navigation and Positioning Model and Method of Motion Platform Based on RGB-D Camera; University of Chinese Academy of Sciences (Institute of Remote Sensing and Digital Earth, Chinese Academy of Sciences): Guangzhou, China, 2017. [Google Scholar]
- Rakita, D.; Mutlu, B.; Gleicher, M. Single-query Path Planning Using Sample-efficient Probability Informed Trees. IEEE Robot. Autom. Lett. 2021, 6, 4624–4631. [Google Scholar] [CrossRef] [PubMed]
- Tao, B.; Wu, H.; Gong, Z.; Yin, Z.; Ding, H. An RFID-Based Mobile Robot Localization Method Combining Phase Difference and Readability. IEEE Trans. Autom. Sci. Eng. 2020, 18, 1–11. [Google Scholar] [CrossRef]
- Sun, W.; Yuan, H.; Liu, N.; Liu, Q.; Shu, S. Fast registration algorithm for line laser point clouds with contour features. J. Electron. Meas. Instrum. 2021, 35, 156–162. [Google Scholar] [CrossRef]
- Sandy; Zhou, J.; Huang, P.; Li, L. Hybrid algorithm for line segment feature extraction of laser SLAM autonomous navigation. Mech. Des. Manuf. 2021, 5, 264–268. [Google Scholar] [CrossRef]
- Borges, G.A.; Aldon, M.J. Line extraction in 2D range images for mobile robotics. J. Intell. Robot. Syst. 2004, 40, 267–297. [Google Scholar] [CrossRef]
- Li, D.; Zhang, K.; Xu, R.; Luo, Z.; Wu, J.; Gui, H. Feature extraction for map creation of laser navigation robot without reflector. China Mech. Eng. 2018, 29, 2733–2739. [Google Scholar] [CrossRef]
- Castellanos, J.A.; Tardós, J.D. Laser-based segmentation and localization for a mobile robot. Robot. Manuf. Recent Trends Res. Appl. 1996, 6, 101–108. [Google Scholar]
- Ng, C.-C.; Yap, M.H.; Costen, N.; Li, B. Wrinkle Detection Using Hessian Line Tracking. IEEE Access 2015, 3, 1079–1088. [Google Scholar] [CrossRef] [Green Version]
- Lu, F.; Xu, Y.; Li, Y.; Su, Z.; Wang, R. Multi-view fusion target detection and recognition based on DSmT theory. Robot 2018, 40, 723–733. [Google Scholar] [CrossRef]
- Li, W.; Wang, W. Geometric feature map extraction method of laser SLAM based on Hough transform. Mechatronics 2018, 24, 3–7. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, Y.; Zhenzhong, C.H.E.N.; Peipei, X.I.A.O.; Bin, L.U.O. Splitting and Merging Based Multi-model Fitting for Point Cloud Segmentation. J. Geod. Geoinf. Sci. 2019, 2, 78–89. [Google Scholar] [CrossRef]
- Pu, L.; Xv, J.; Deng, F. An Automatic Method for Tree Species Point Cloud Segmentation Based on Deep Learning. J. Indian Soc. Remote Sens. 2021, 49, 1–10. [Google Scholar] [CrossRef]
- Duda, R.O.; Hart, P.E. Pattern Classification and Scene Analysis; IEEE: New York, NY, USA, 1974; Volume 19, pp. 462–463. [Google Scholar] [CrossRef]
- Wang, Y.S.; Qi, Y.; Man, Y. An Improved Hough Transform Method for Detecting Forward Vehicle and Lane in Road. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2021; Volume 1757, p. 012082. [Google Scholar] [CrossRef]
- Chen, W.; Jia, C. Artificial intelligence technology of laser imaging radar image edge detection. Laser Mag. 2020, 41, 85–88. [Google Scholar] [CrossRef]
- He, Y.; Dong, L.; Zeng, F.; Dong, C.; Yao, J. Power Lines Extraction Using UVA LiDAR Point Clouds in Complex Terrains and Geological Structures. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2021; Volume 804, pp. 032053–032058. [Google Scholar] [CrossRef]
- Ravankar, A.A.; Ravankar, A.; Emaru, T.; Kobayashi, Y. Line Segment Extraction and Polyline Mapping for Mobile Robots in Indoor Structured Environments Using Range Sensors. SICE J. Control Meas. Syst. Integr. 2020, 13, 138–147. [Google Scholar] [CrossRef]
- Yang, Y.; Yang, H.; Zhou, Z.; Yang, L. Research on High Voltage Power Line extraction based on Transmission Line Point Cloud characteristics and Model fitting. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2020; Volume 446, pp. 042011–042018. [Google Scholar] [CrossRef]
- Ma, Y.; Wei, Z.C.; Wang, Y. Point Cloud Feature Extraction Based Integrated Positioning Method for Unmanned Vehicle. Appl. Mech. Mater. 2014, 3276, 590. [Google Scholar] [CrossRef]
- Lv, J.; Kobayashi, Y.; Ravankar, A.; Emaru, T. Straight line segments extraction and EKF-SLAM in indoor environment. J. Autom. Control Eng. 2014, 2, 270–276. [Google Scholar] [CrossRef]
- An, S.Y.; Kang, J.G.; Lee, L.K.; Oh, S.Y. SLAM with salient line feature extraction in indoor environments. In Proceedings of the 2010 11th International Conference on Control Automation Robotics & Vision, Singapore, 7–10 December 2010; IEEE: New York, NY, USA, 2010. [Google Scholar]
- Ravindranath, P.A.; Buyukburc, K.; Hasnain, A. Self-Calibration of Sensors Using Point Cloud Feature Extraction. In SPIE Future Sensing Technologies; International Society for Optics and Photonics: Bellingham, WA, USA, 2020. [Google Scholar] [CrossRef]
- Xu, Z.; Shin, B.-S.; Klette, R. Accurate and Robust Line Segment Extraction Using Minimum Entropy With Hough Transform. IEEE Trans. Image Process. 2015, 24, 813–822. [Google Scholar] [CrossRef]
- Li, H.; Liu, X.; Li, T.; Gan, R. A novel density-based clustering algorithm using nearest neighbor graph. Pattern Recognit. 2020, 102, 107206. [Google Scholar] [CrossRef]
- Yang, Z.; Wang, C.; Zhou, L.; Yi, S. Line segment feature extraction method based on density clustering. Manuf. Autom. 2019, 41, 88–91. [Google Scholar]
- Yu, C.; Ji, F.; Xue, J. Cutting Plane Based Cylinder Fitting Method With Incomplete Point Cloud Data for Digital Fringe Projection. IEEE Access 2020, 8, 149385–149401. [Google Scholar] [CrossRef]
- Gao, X.; Jiang, L.; Wang, H.; Wang, X. Laser radar line feature extraction algorithm combined with SVM. Comput. Eng. Des. 2019, 40, 2384–2388. [Google Scholar] [CrossRef]
- Liu, P.; Ren, G.; He, Z. The extraction method of feature corners in 2D laser SLAM. J. Nanjing Univ. Aeronaut. Astronaut. 2021, 53, 366–372. [Google Scholar] [CrossRef]
- Slam Benchmarking. Available online: http://ais.informatik.uni-freiburg.de/slamevaluation/datasets.php (accessed on 24 May 2022).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Actual Number of Breakpoints | Number of Breakpoints Extracted | Actual Number of Cornerpoints | Number of Cornerpoints Extracted |
|---|---|---|---|---|
| 1 | 16 | 15 | 4 | 4 |
| 2 | 11 | 11 | 8 | 9 |
| 3 | 20 | 20 | 4 | 4 |
| 4 | 6 | 7 | 13 | 13 |
| 5 | 4 | 4 | 9 | 9 |
| 6 | 13 | 14 | 9 | 8 |
| 7 | 9 | 9 | 7 | 7 |
| 8 | 6 | 6 | 11 | 11 |
| 9 | 8 | 6 | 13 | 14 |
| 10 | 12 | 12 | 5 | 5 |
| Parameter | Value |
|---|---|
| measurement range | 0.05 m–25 m |
| scanning angle | 160° (adjustable) |
| angular resolution | 0.33° |
| scanning frequency | 15 Hz |
| system error | ±60 ms |
| Number | Actual Number of Breakpoints | Actual Number of Cornerpoints | Number of Breakpoints Extracted | Number of Cornerpoints Extracted | Accuracy Rate of Feature Point Extraction | Algorithm Time/ms | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| IEPF Algorithm | Proposed Algorithm | IEPF Algorithm | Proposed Algorithm | IEPF Algorithm | Proposed Algorithm | IEPF Algorithm | Proposed Algorithm | |||
| 1 | 6 | 8 | 6 | 6 | 10 | 8 | 85.71% | 100% | 23.3 | 5.7 |
| 2 | 8 | 4 | 8 | 9 | 4 | 4 | 100% | 91.67% | 19.4 | 4.6 |
| 3 | 7 | 8 | 7 | 7 | 11 | 8 | 80% | 100% | 24.6 | 5.1 |
| 4 | 12 | 6 | 9 | 12 | 7 | 7 | 77.78% | 94.44% | 21.4 | 4.9 |
| 5 | 6 | 11 | 5 | 6 | 11 | 11 | 94.12% | 100% | 26.9 | 6.8 |
| 6 | 5 | 18 | 6 | 5 | 19 | 16 | 91.30% | 91.30% | 39.7 | 9.2 |
| 7 | 3 | 10 | 3 | 3 | 12 | 10 | 84.62% | 100% | 22.6 | 5.6 |
| 8 | 5 | 6 | 5 | 5 | 6 | 6 | 100% | 100% | 20.1 | 4.7 |
| 9 | 2 | 7 | 2 | 2 | 8 | 7 | 88.89% | 100% | 20.6 | 5.2 |
| 10 | 8 | 9 | 7 | 8 | 10 | 8 | 88.24% | 94.12% | 26.3 | 6.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Zhang, L.; Qian, K.; Sui, L.; Lu, Y.; Qian, F.; Yan, T.; Yu, H.; Gao, F. An Adaptive Threshold Line Segment Feature Extraction Algorithm for Laser Radar Scanning Environments. Electronics 2022, 11, 1759. https://doi.org/10.3390/electronics11111759
Liu Y, Zhang L, Qian K, Sui L, Lu Y, Qian F, Yan T, Yu H, Gao F. An Adaptive Threshold Line Segment Feature Extraction Algorithm for Laser Radar Scanning Environments. Electronics. 2022; 11(11):1759. https://doi.org/10.3390/electronics11111759
Chicago/Turabian StyleLiu, Yiting, Lei Zhang, Kui Qian, Lianjie Sui, Yuhao Lu, Fufu Qian, Tingwu Yan, Hanqi Yu, and Fangzheng Gao. 2022. "An Adaptive Threshold Line Segment Feature Extraction Algorithm for Laser Radar Scanning Environments" Electronics 11, no. 11: 1759. https://doi.org/10.3390/electronics11111759
APA StyleLiu, Y., Zhang, L., Qian, K., Sui, L., Lu, Y., Qian, F., Yan, T., Yu, H., & Gao, F. (2022). An Adaptive Threshold Line Segment Feature Extraction Algorithm for Laser Radar Scanning Environments. Electronics, 11(11), 1759. https://doi.org/10.3390/electronics11111759