1. Introduction
Virtual reality devices aim to facilitate experiences that are more similar to real-world experiences compared to conventional media, such as television and radio. With the advancement of computer graphics, VR devices focusing on vision have evolved to integrate auditory perception into their systems. Interactions are one key element of an immersive experience [
1]. Currently, visual and auditory perception—the core experiences of VR devices—are also good for interaction, but the addition to media of elements such as touch and smell can bring users closer to immersive experiences. In particular, considering that VR devices are becoming more widely publicized in various simulation fields such as education, games, and healthcare where immersion and realism are important, VR device designs should incorporate interactions using not only vision and hearing but also other senses.
The tactile sense is useful for increasing immersion and realism based on interactions because this sense is affected by the user’s input in most cases [
2,
3]. Current virtual bundle controllers of commercialized VR devices (such as Oculus and HTC Vive) include vibration motors, but they are limited in expressing realistic haptic reactions within a virtual environment. For this reason, many studies on haptic devices using the tactile sense are currently underway [
4,
5], and because interaction is the goal, a considerable amount of this research focuses on the hands. There are two main types of research that facilitate tactile sensation in the hands.
Tactile haptic devices implement the tactile sensation delivered to the skin by reproducing the roughness, temperature, and rigidity of an object’s surface. This is usually accomplished by using vibration, ultrasound, and Peltier devices, along with methods to recreate the actual surface texture [
6,
7,
8,
9,
10].
Force-feedback haptic devices, which provide resistance to body movement or directly move the body by using physical force, such as by delivering weight, kinetic energy, and the like, are another type of haptic device [
11,
12]. These are usually made of motors or actuators, and the result of operating the device is returned to the user in the form of force information. In this study, a force-feedback haptic device is studied and designed to add more realism to the VR content experience.
To date, many studies on VR haptics have added a haptic interface by creating a new device without a bundle controller [
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28,
29,
30], such as the already commercialized Oculus Quest or HTC Vive. However, the parallel advancement of controllers and haptic devices makes it more economical and technically effective to use the basic functions of the controller together with the haptic device to reduce the weight and simplify the design, which are essential to the success of handheld devices. Therefore, in this study, a haptic device that facilitates the haptic experience was developed by linking an existing controller with a module. In particular, unlike previous haptic devices [
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28,
29,
30], in this study, we aimed to implement tug sensations, with the tool used by the user slipping out of the hand or pushed into the hand in the VR environment. This haptic feedback is especially useful when a user uses tools in a virtual environment. For instance, let us suppose that someone has an axe in a virtual environment and wants to cut a tree. A general haptic device produces only haptic feedback when the axe collides with the tree. However, the haptic device introduced in this paper can generate the centrifugal force or inertia of the axe head and deliver it to the hand when the user wields the axe. In addition, when someone stabs or pokes an object with a tool, this haptic device creates the sensation of the tool sliding in the hand, regardless of the direction.
To determine whether the user feels the unique force of the pushing or pulling of the tool in their hand in the VR environment, two methods that rely on strengthening the tug haptic experience in VR content were compared as assessed by users. The first case involves vibration haptics through the basic function of the VR bundle controller, and the second case involves a haptic device with newly designed force feedback linked to the VR bundle controller by a module. Then, we compared and analyzed the time, frequency, and range of users interacting with objects within a virtual environment.
2. Related Works
To be described later, force-feedback haptic devices in the VR environment consist of motors or actuators used to generate physical force. Furthermore, VR force-feedback haptic devices with a head-mounted display (HMD) are handheld in order to make it possible to roam freely on a room-scale co-ordinate plane [
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28,
29,
30]. VR haptic devices with these elements can be divided into several types.
2.1. Wrist-Type Haptic Devices
The first type provides force feedback to the wrist. Wrist-type devices use motors or propellers in two axes from top to bottom and left to right such that when firing a gun or moving an object, instantaneous force can be applied to the wrist in the opposite direction to the object by moving the motor. Another method lets the wrist feel the reaction of the air resistance [
13,
14]. When a wrist-type haptic device is used, hands are relatively free and can experience intuitive haptics.
2.2. Fingertip-Type Haptic Devices
There are also fingertip-type haptic devices, which are connected to the fingertip to provide the haptic feeling of a button or the like by applying pressure to implement the sense of touch. These devices are simple and capable of providing specific sensations, such as that of clicking a button [
15,
16].
2.3. Glove-Type Haptic Devices
In addition to the wrist or fingertip-type devices, many glove-type devices, which wrap around the whole hand, have been studied. They use a method of directly controlling the finger movements by applying pressure to the fingertips and the palm to provide tactile sensations. Studies on force-feedback haptic devices have been conducted to facilitate the feeling of grabbing an object or the feeling of the rigidity of a virtual object by controlling the fingers in a variety of ways, including with servo motors, electric friction, soft robotics, and tendons [
17,
18,
19,
20,
21]. Glove-type devices are expected to be used for most VR content because the scope of their application is broad.
2.4. Controllor-Type Haptic Devices
The above devices were created for situations in which the hands are usually used without a controller. Because VR systems are primarily used for simulations in the education, gaming, and healthcare fields, the experience of using tools cannot be ruled out. Therefore, numerous controller-type force-feedback haptic devices, including devices that express resistance or weight when the user holds and moves a tool in VR content [
22,
23,
24,
25,
26,
27], have been created and studied. Basically, these devices are constructed using the characteristics of motors or materials, and haptics are implemented using forces such as air resistance, elasticity, and inertia.
2.5. Other Haptic Devices
Finally, there have been studies introducing devices that allow the user to feel a tool according to a change in the acting point instead of focusing on the type or generation of force [
28]. In another study, researchers used a method to connect the shoulder and the hand with a wire to generate haptic force-feedback in the hand as a support point on the shoulder [
29]. In another study, researchers used a one-way brake to generate rigid-grip force feedback, adjusting the amplitude of asymmetric vibrations to feel weights of different sizes [
30].
2.6. Linked-Type Device
The current trend in haptic devices involves creating new devices rather than using the bundle controller of an HMD. For these newly manufactured haptic controllers to be commercialized, they must include functions such as input buttons, clicks, drags, and scrolls, which are the functions of existing bundled controllers. In other words, when products designed in such a way are eventually commercialized, they must have the basic functions of bundle controllers, which makes them complex. Furthermore, economic loss is a concern because already commercialized bundle controllers are not used. In this study, therefore, the implemented device has a structure such that the bundle controller—which has been neglected in recent haptic device studies—can be used by connecting through a module, as recently studied [
31,
32].
As shown in
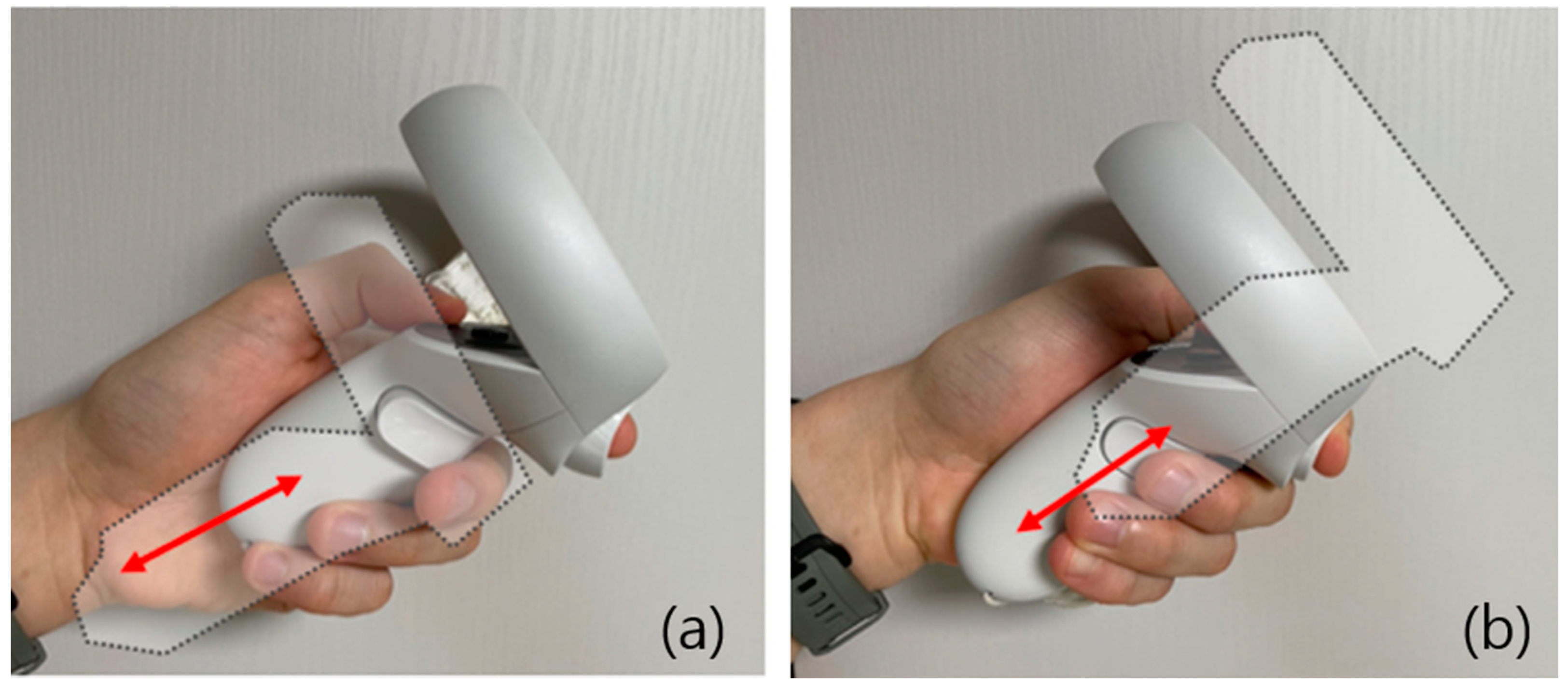
Figure 1, while retaining the advantage of using the controller as is, the proposed system implements the feeling of a tool slipping out of the hand through the centrifugal force experienced when the user swings the tool in VR content or the feeling of the tool being pushed into the hand when the user uses the tool to push another object in VR content.
3. Apparatus
3.1. Apparatus Design
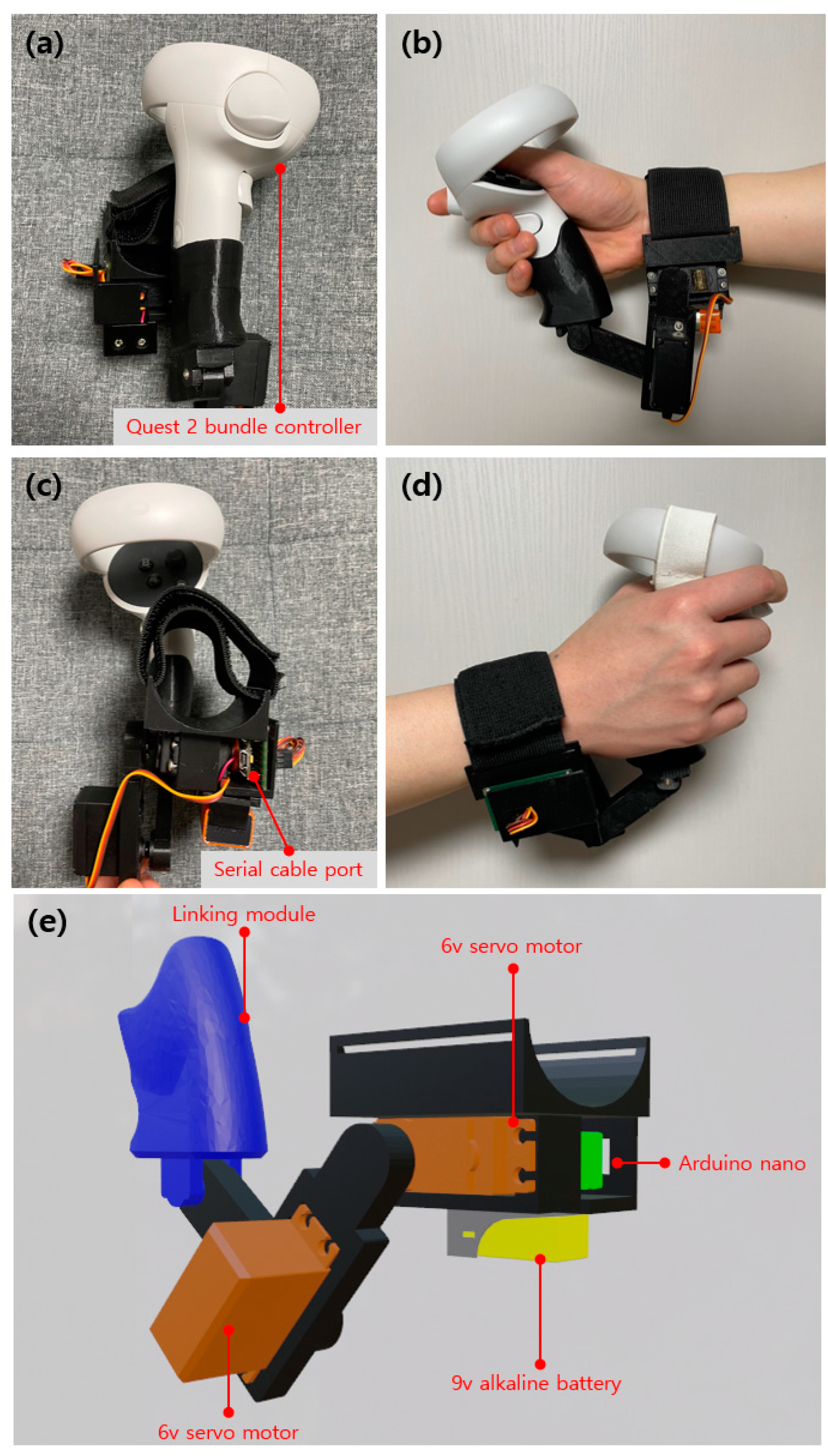
The haptic device developed in this work was named HapTug to express that the haptic device uses force feedback. HapTug is a compound phrase made up of “hap” and “tug”. “Hap” refers to “haptic”, and “tug” refers to “tugs”, which are pushing and pulling forces. The device was designed to increase the realism and immersion experienced by users when consuming VR content. Realism is a measure of the similarity between virtual reality and the actual reality experienced by users. Immersion is a process that minimizes the sense of displacement brought about by virtual reality via the compatibility provided by the device. The device was created in the form of a handheld device, using the structure of a robot arm. The final prototype, shown in
Figure 2, was produced.
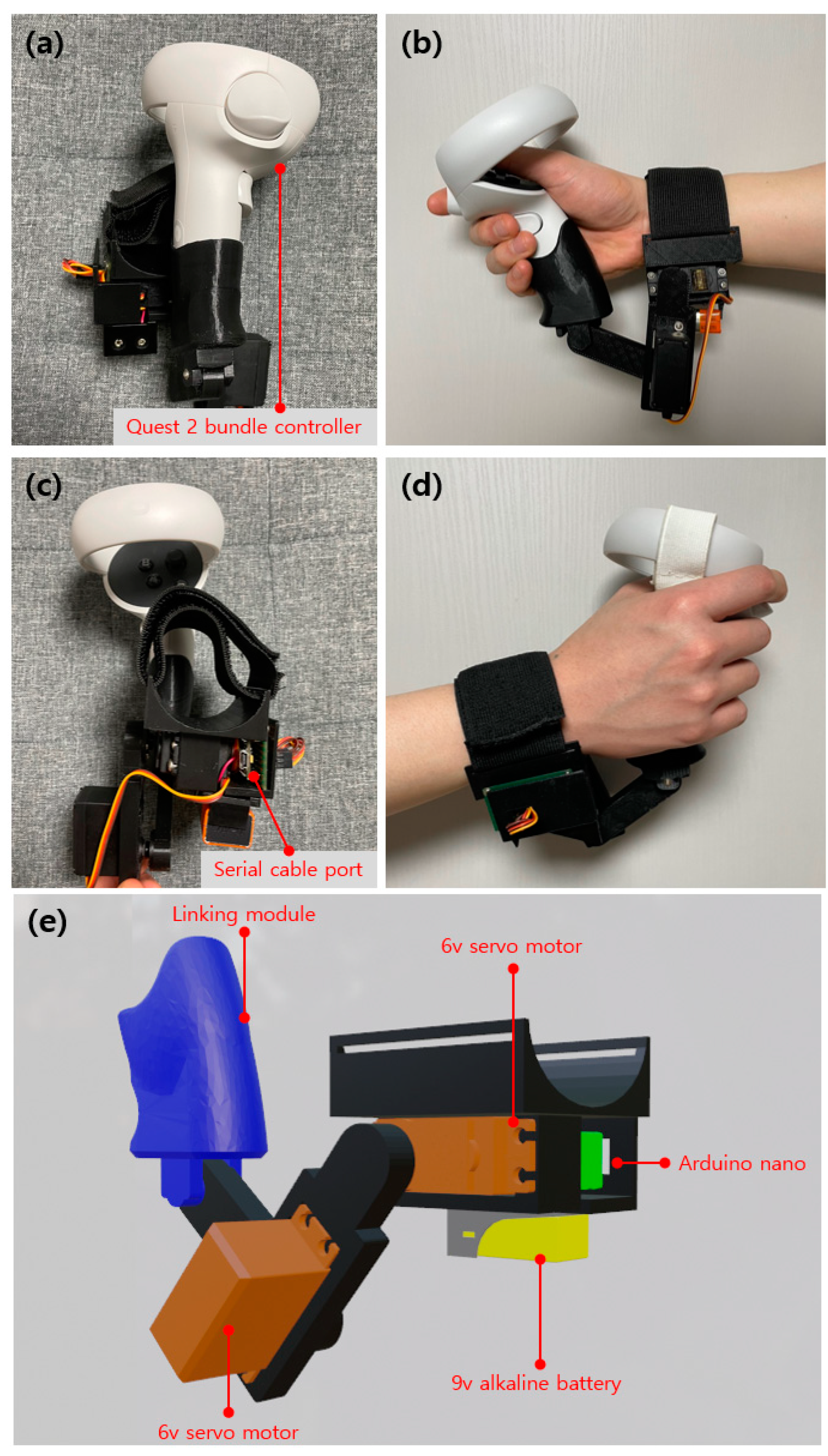
The device was designed with two degrees of freedom (2DoF) for flexible pushing or pulling of the controller according to the angle of the wrist because the pushing and pulling angle of the controller changes depending on the movement of the wrist when a force is applied. Based on this principle, the device was fabricated to move in four directions—up, down, front, and back—when viewed from the front. The entire mechanical structure, except screws, was printed using a Sindoh 3dwox 2x 3D printer with polylactic acid (PLA) material, and a linking module was fabricated to link the HapTug and the Oculus Quest 2 bundle controller. The link was fastened by the pressure of the linking module. Initially, the string attached to the Oculus Quest 2 bundle controller was pulled out to the bottom of the linking module and fixed, but it was later removed because the linking module held half of the bundle controller handle and was stable. To fix the HapTug on the user’s wrist, a Velcro band was used to wrap around the wrist.
The firmware controlling the two 6V servo motors was written in C++, and all movements were controlled using an Atmega328 based Arduino. The Arduino Nano moves its motors through serial communication connected by a USB 2.0 mini-B-type cable depending on the interaction with the software running on the Oculus Quest 2 HMD (Meta Platforms, Cambridge, MA, USA).
HapTug has a size of 60 × 65 × 65 (mm) and a moving range of 30 to 120 (mm) through the connection with the VR device bundle controller. The total weight of the device, excluding the bundle controller and 9V alkaline battery, is approximately 300 g.
With two researchers in the laboratory who have extensive experience in using VR content, the default position where users could naturally hold the HapTug and the Oculus Quest 2 bundle controller was determined. Afterward, the servo motor angles corresponding to the position of the module connected to HapTug and the Oculus Quest 2 bundle controller were set to the default position value.
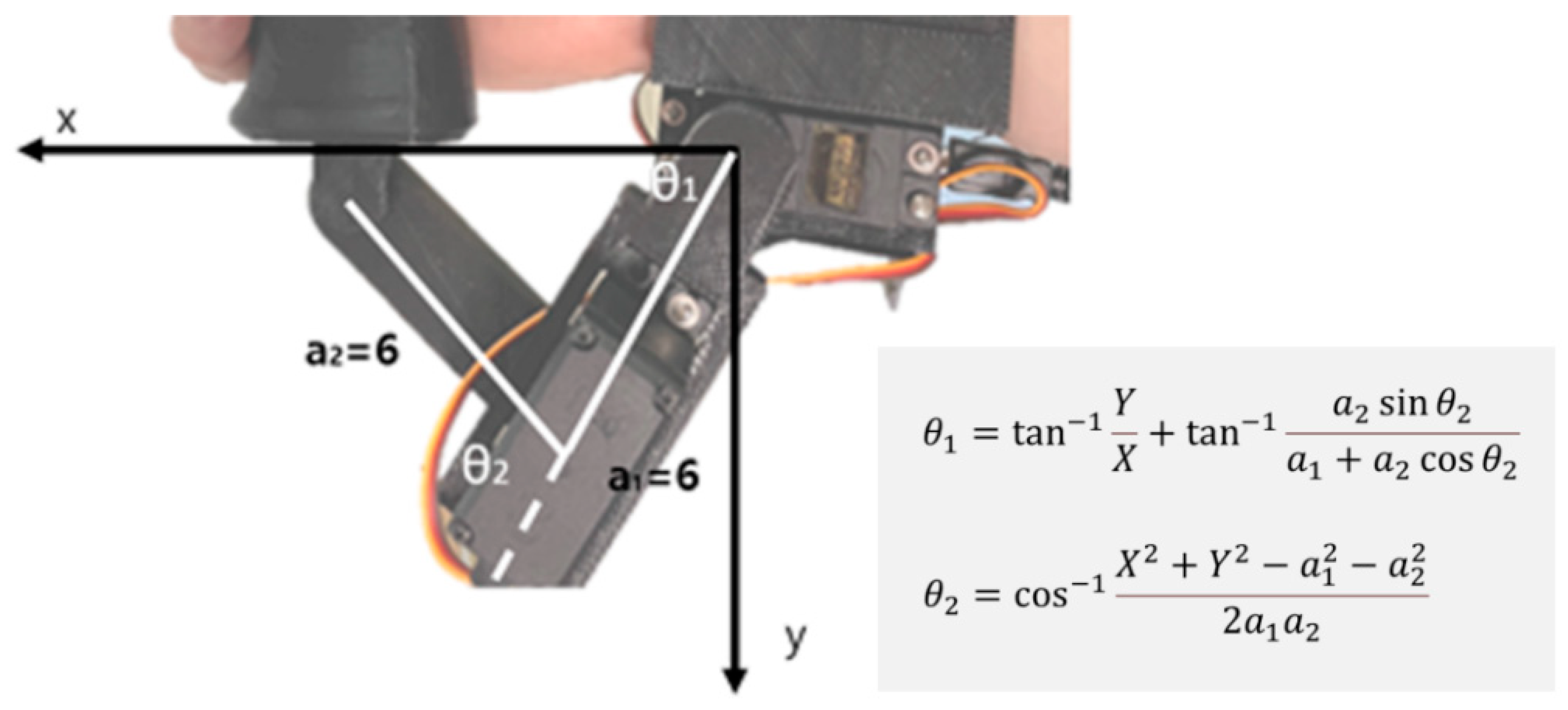
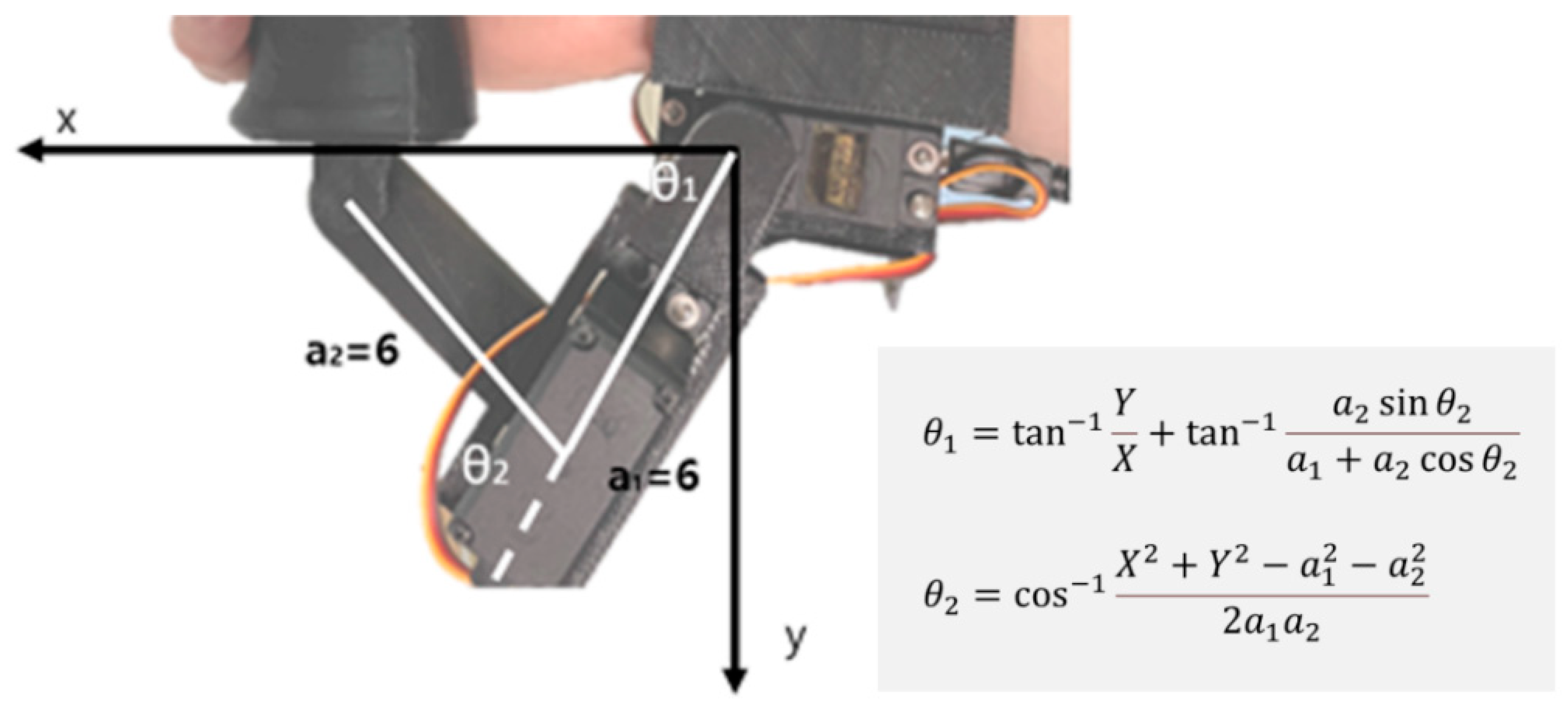
To this end, the HapTug was placed on a Cartesian co-ordinate plane system to assign the desired co-ordinate values (
X = 90 mm,
Y = 30 mm); then, as shown in
Figure 3, an inverse kinematics equation was used to assign the angles of the servo motors [
33].
is the set angle of a motor close to the wrist, and
is the set angle of a motor attached to the controller. By inputting the position in
X and
Y, the angle of the motor can be obtained.
Using this equation in an internal program, the device was designed to automatically calculate the set angle of the motor () when the movement position is set by changing the co-ordinates to give haptic feedback.
3.2. Force Evaluation
To measure the amount of force that the HapTug device can exert on the Oculus Quest 2 bundle controller, the force was measured five times, as shown in
Table 1, in all operable directions. The force was measured using a Lutron FG-5005 force gauge with a resolution of 0.01 N. Considering that the developed device can exert a force of about 12 N and usually exerts said force at the default position (
), the torque of this device is approximately 1.1 N/m.
4. User Experiment 1—Pilot Test
Before starting the main experiment, we conducted a pilot test. By making sure that the device provides haptics similar to real life, we attempted to achieve validity for User Experiments 2 and 3.
4.1. Experimental Design
An experiment was conducted to determine whether the device could provide the haptics for the feeling of a tool slipping away from the hand when the tool is swung with a force of 12 N and the feeling of the tool being pushed into the hand when interacting with another object. A total of eight participants (three were female) took part in the experiment, and they were all right-handed and had no arm or body disability.
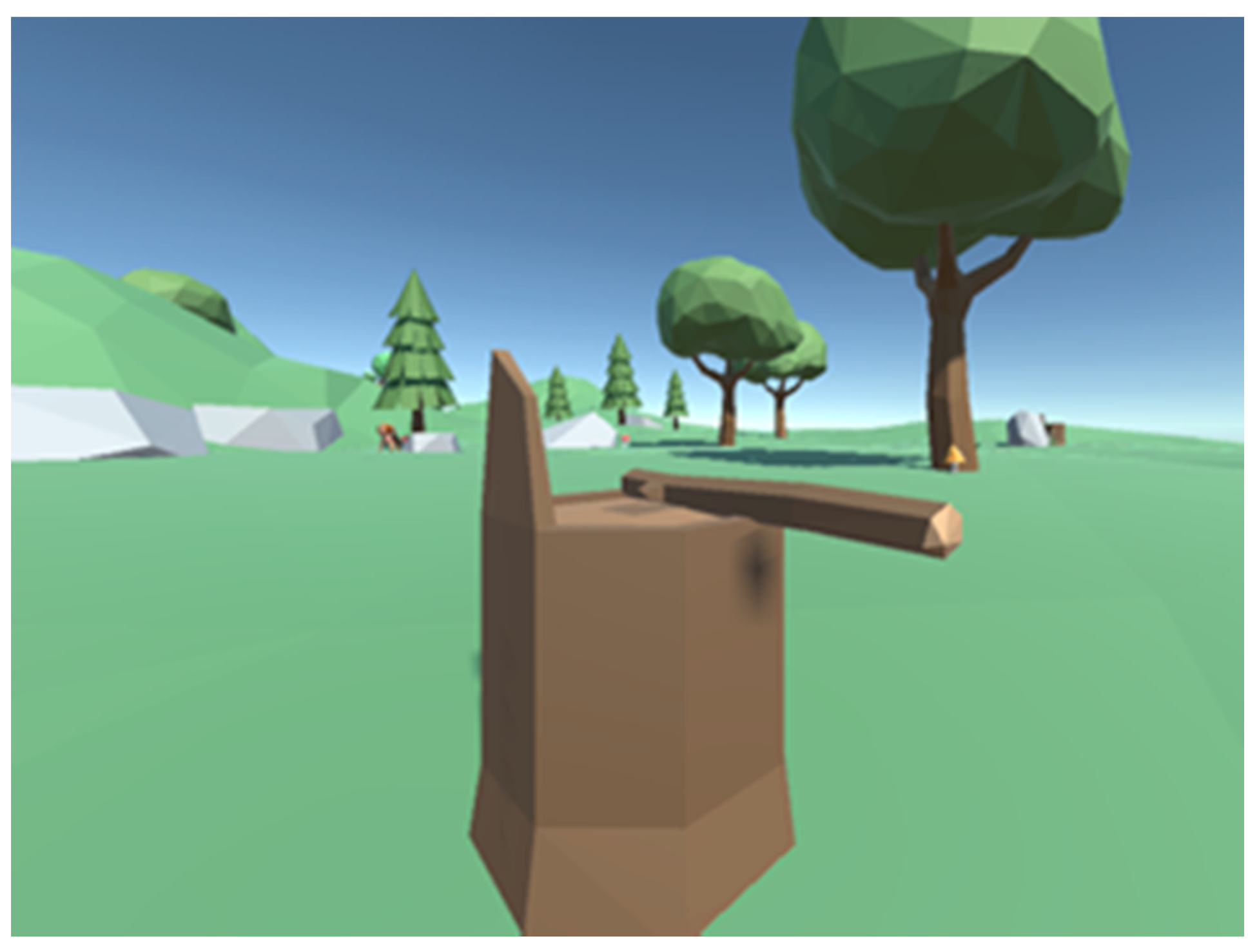
Content in which users wielded wooden sticks was created for the experiment using Unity C#, as shown in
Figure 4.
The experiment was conducted by connecting the computer on which Unity runs and HapTug through serial communication. The USB serial communication latency was set to the default value (16 ms). Users were free to wield a wooden stick and hit objects with it for 1 min. After the experiment, a survey was conducted to compare the sensation wielding a tool in real life with wielding one in VR using the HapTug. In addition, the visual effect of the VR environment may have affected the haptic effect of the HapTug, so it was also evaluated with vibration but without HapTug. The sensations were evaluated on a seven-point Likert scale for two situations: the situation where the tool is wielded in the VR environment and the situation where the tool collides with an object and is being pushed into the hand. A score of zero means that the haptics of virtual reality are different from the feeling in the real world, and a score of seven means that the haptics are close to the real-world sensation.
4.2. Result
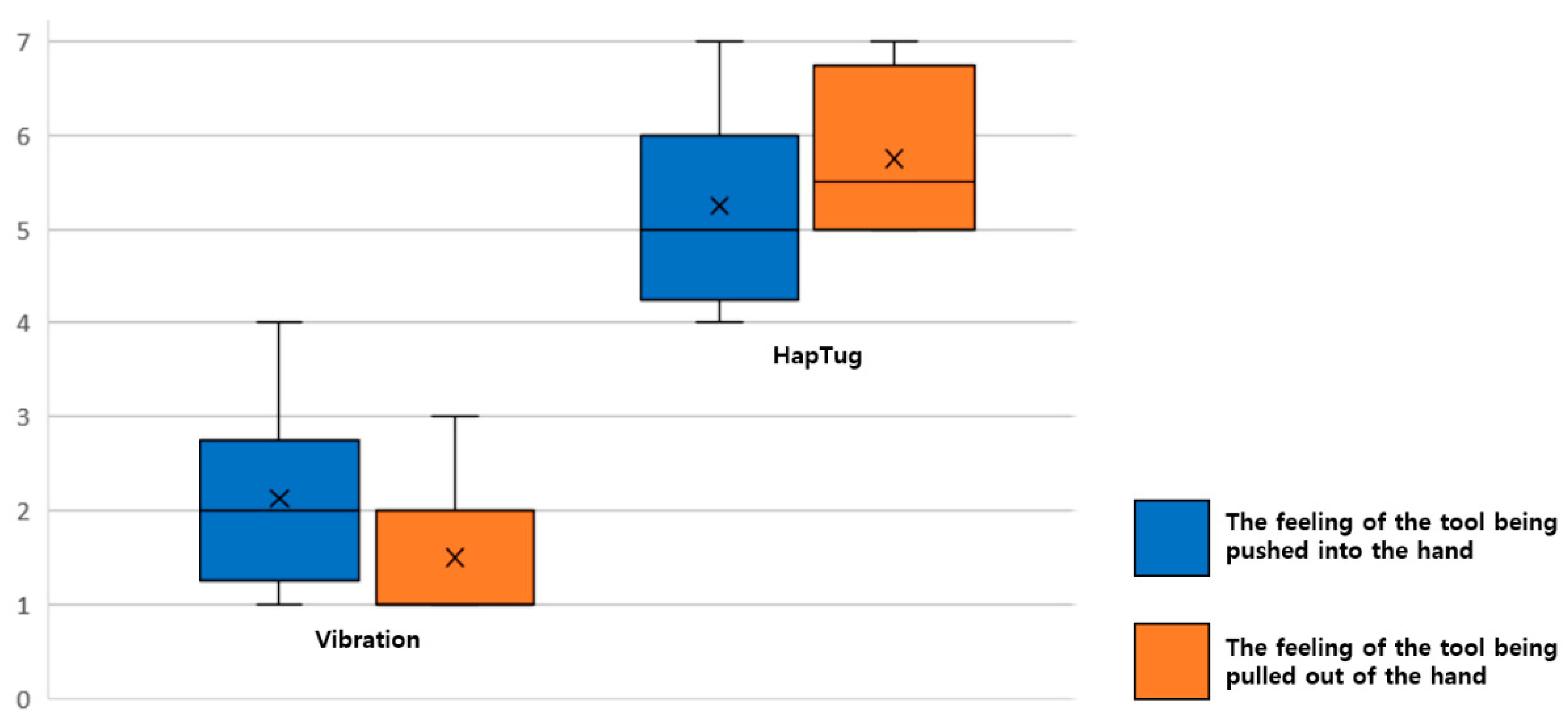
As shown in
Figure 5, when using the HapTug, the average score was 5.25 points for the feeling of the tool being pushed into the hand while using it in the VR content, and the score was 5.75 points for the feeling of the tool slipping away from the hand while wielding the tool; the vibration session scores averaged 2.125 and 1.5, respectively. Although there are some differences, it was observed that the haptics of the HapTug are above average for both sensations and considering the score difference in the vibration session. These differences were further confirmed by a Wilcoxon signed-rank test: the feeling of the tool being pushed (Z = −2.536,
p = 0.011) and the feeling of the tool being pulled (Z = 2.585,
p = 0.010). It can be said that the VR environment had a minimal effect on the HapTug session score.
5. User Experiment 2
Based on the above experimental results, a second experiment was conducted to examine whether the users perceived increased realism or immersion in the virtual environment.
5.1. Participants
Participants were recruited from Sogang University in Seoul. According to the VR experience time, 10 participants were recruited into each of the following three groups: beginner, intermediate, and advanced, corresponds to VR usage of less than one hour, less than ten hours, and ten hours or longer per week, respectively.
These 30 participants (7 of whom were female) were all Koreans in their 20 s and 40 s (mean, 31 years old; SD, 3.5) and were right-handed.
5.2. User Experiment with VR Content
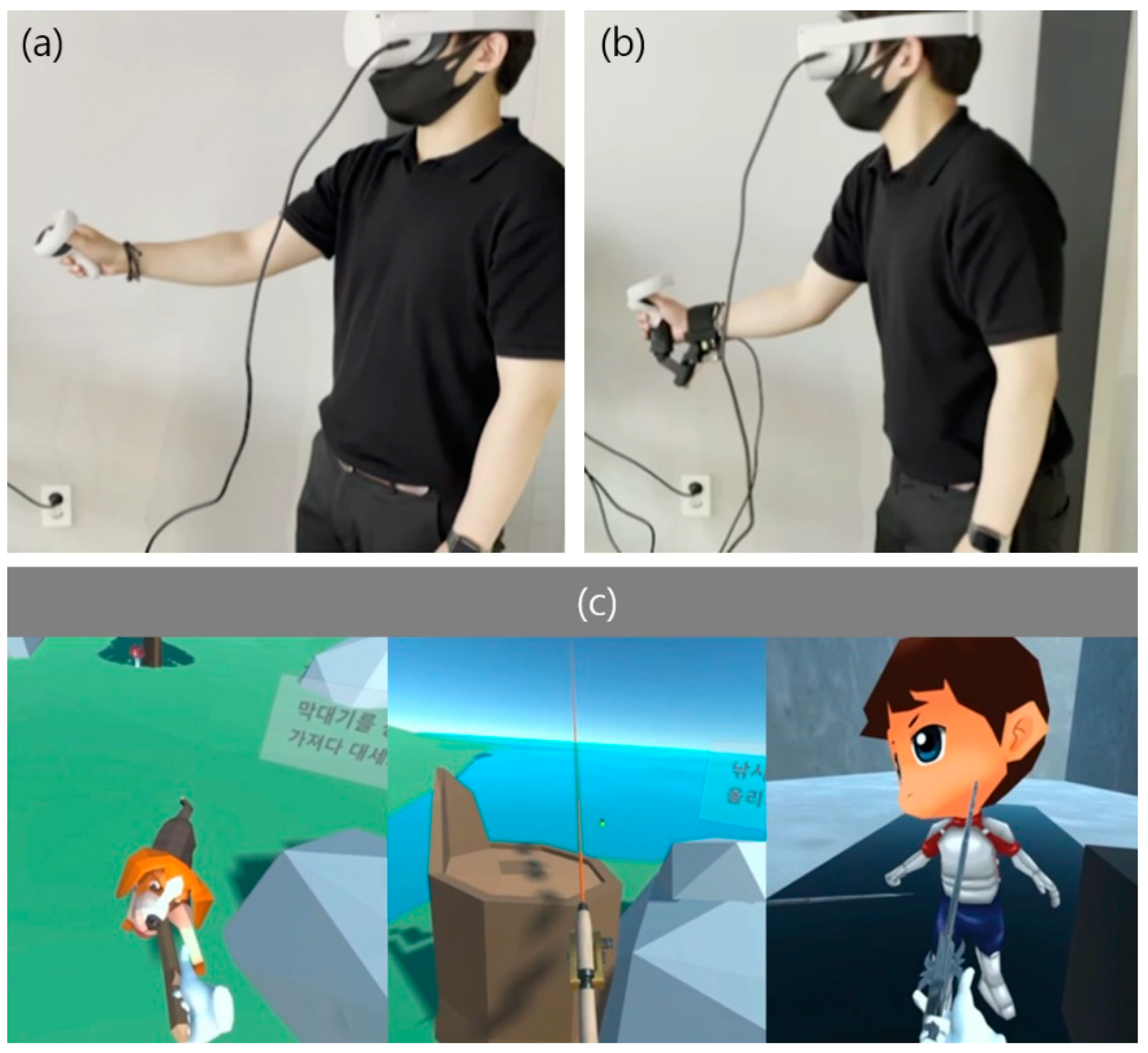
An evaluation was conducted to verify the effects of HapTug on the user experience of VR. As shown in
Figure 6 and
Figure 7, three types of VR content were created using Unity C# for the experiment. The content and the HapTug were connected via USB serial communication with latency set to the default (16 ms), and none of the participants answered that they felt a disparity in the interview. Two people with plenty of experience with VR experienced the content to determine the appropriate moving angles of the controller linked to the device for force feedback for each content type in the experiment. Because the experiment began by picking a tool, the angle for a comfortable default position when picking up a tool was determined for effective interaction movements within each content type.
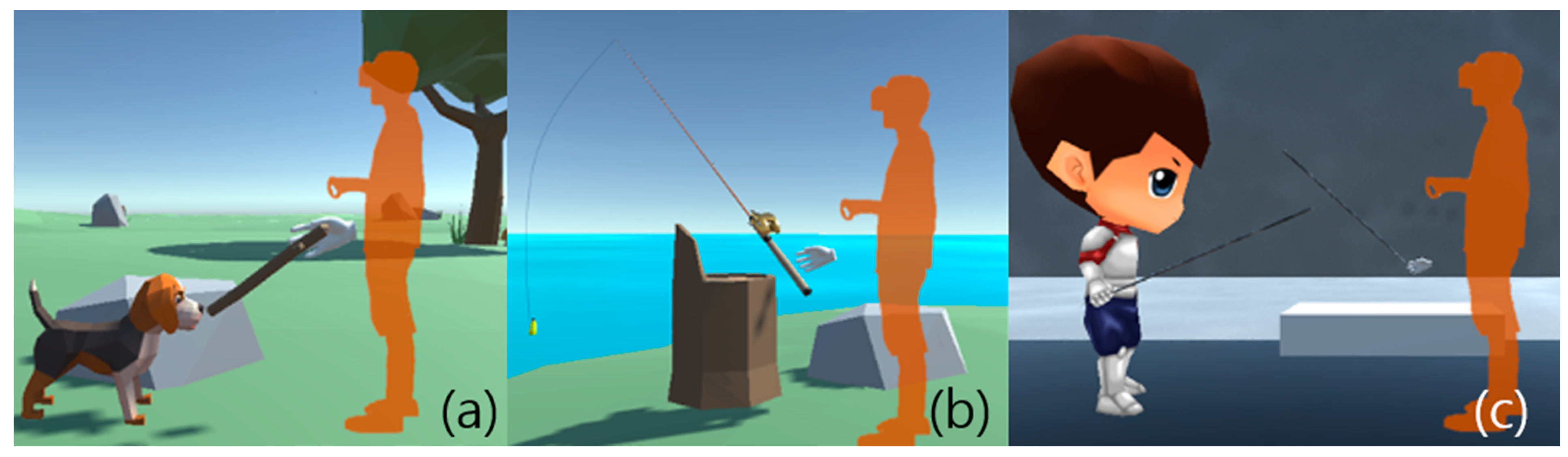
In the case of the tug game shown in
Figure 6a, a pulling force, i.e., the force of the tool moving out of the hand, was implemented as a dog biting and tugging a stick. The device was designed to move in real time so that the user could feel the force of the tool being pulled out of the hand in the outward direction from the body at the default position according to the animation of the dog. With respect to the fishing content shown in
Figure 6b, the device was designed to implement the feeling of the fishing rod being pulled away from the hand by centrifugal force when the user swings the rod. Moreover, the velocity and strength of the force were controlled to implement the feeling of a fish taking the bait. Lastly, in the fencing content shown in
Figure 6c, the force of the tool being pushed toward the body was implemented when the user interacted with an object.
5.3. Task and Procedure
The experiment was conducted once using the Oculus Quest 2 bundle controller and once more using the HapTug-linked bundle controller to play the content while experiencing tug haptics.
To eliminate the influence of the primacy effect and the halo effect on the experimental results, half of the participants proceeded with the experiment using the device- and HapTug-connected controller first, and the rest of the participants used the regular controller first in the experiment. When using only the bundle controller, the users were allowed to feel the vibrations, the basic function of the Oculus Quest 2 bundle controller, instead of the haptics of HapTug. All participants experienced three VR content types in a row in one condition, taking a one-minute break between each VR experience. It takes about two minutes to experience the three content types in a row once, so the total experimental time per person was about 5 min.
At the end of each experience, a survey was conducted—that is, twice in total—and a follow-up interview was conducted after finishing all experiments and evaluations. For the evaluation items, an experimental methodology was adopted to verify the reinforcement of the VR experience when a haptic device was used by comparing three items—realism, immersion, and enjoyment—when studying the user experience of the haptic device in previous studies [
26,
28,
34,
35]. As shown in
Table 2, the survey questions were constructed by selecting appropriate questions on realism, immersion, and enjoyment based on previous studies [
36,
37,
38]. The questionnaire was provided in the participant’s native language, and the questions were asked in a random order.
5.4. Result of Questionnaire
The experiments were conducted by dividing the participants into two groups. Therefore, the homogeneity of the resulting values between the two groups was tested first. Taking the first result values in
Table 3, for example, the homogeneity between the realism measurement value of the user group on only the controller in the first experiment and that of the user group on only the controller in the second experiment was examined. To this end, the Wilcoxon signed-rank test was applied to the realism, immersion, and enjoyment result values in each case. W is a random variable calculated from the sample data used in the hypothesis test. These test statistics (W) can be used to determine whether to reject the null hypothesis.
p is the significance probability (
p) calculated from W. In this experiment, the standard was 0.05. The results after securing the homogeneity of the two values—the results from the experiments of different sequential orders—with
p > 0.05 are shown in
Table 3.
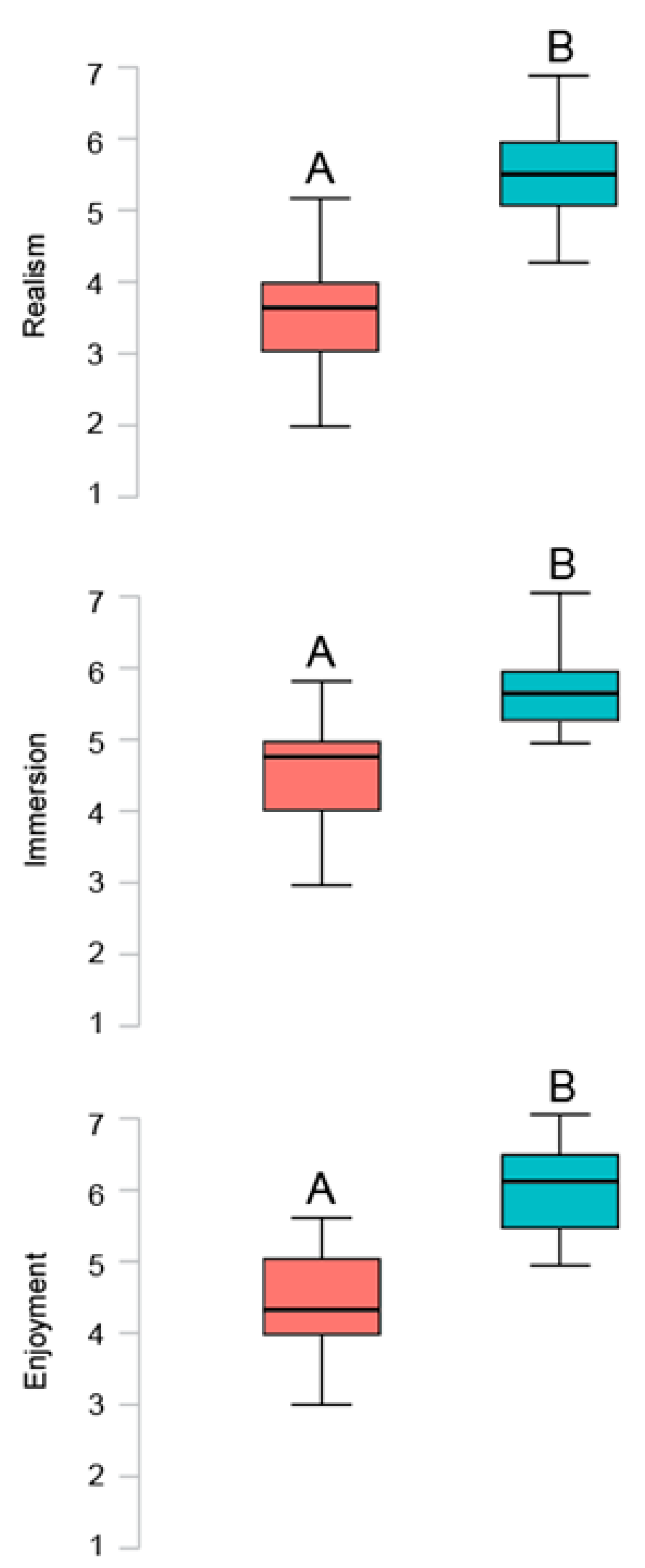
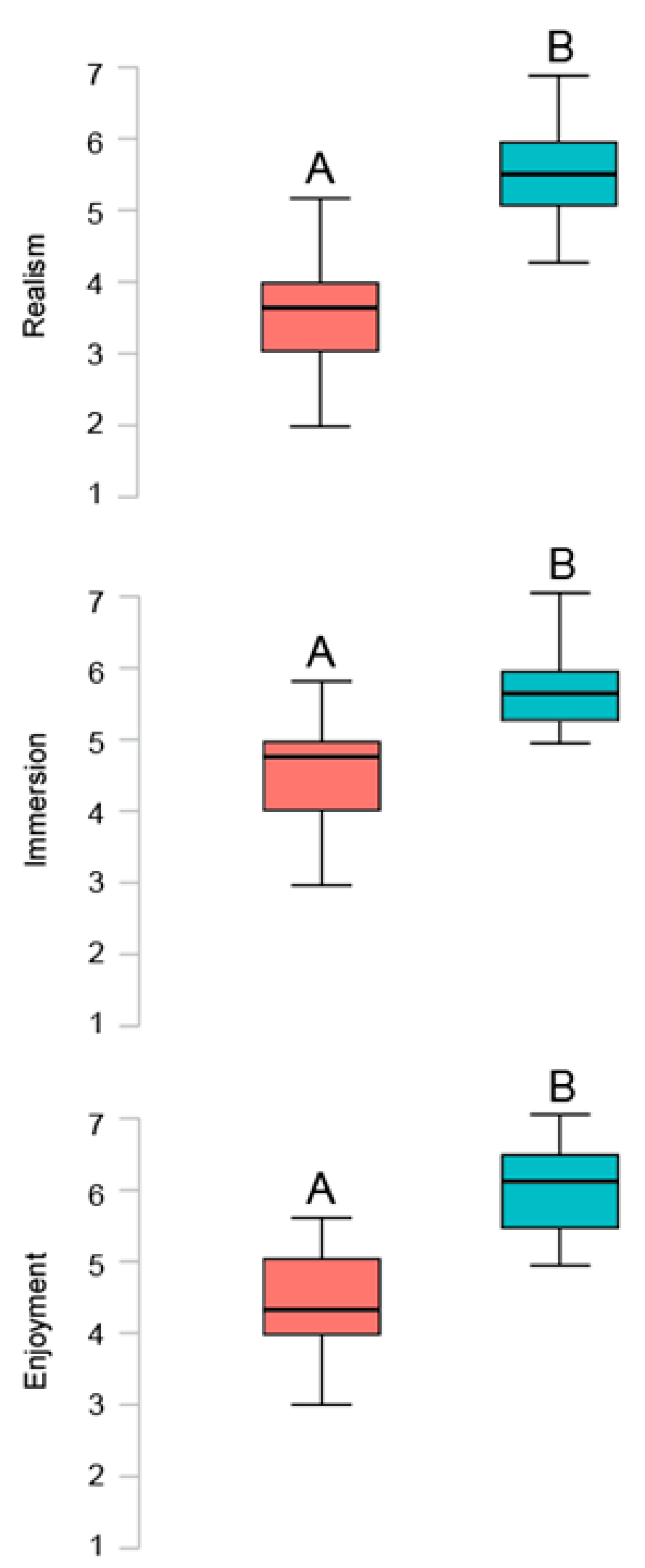
As shown in
Figure 8, when the average Likert-scale score was examined for each item, it was found that the users perceived greater realism, immersion, and enjoyment when they used the VR bundle controller with the haptic device than when they used the VR bundle controller alone.
In addition, multivariate analysis of variance (MANOVA) was conducted to obtain the score difference between the HapTug and the controller alone for each VR experience. It was expected that the response to the haptic device would be different depending on the VR experience of three groups (beginner, intermediate, and advanced). The MANOVA test was performed using the absolute value of the difference between the Likert-scale value of the controller and that of the HapTug. In terms of the results for realism (F2, 27 = 0.022, p = 0.978), immersion (F2, 27 = 3.173, p = 0.059), and enjoyment (F2, 27 = 0.179, p = 0.837), all p values were higher than 0.05. In the analysis based on VR experience, there was no significant difference in the scores between VR experiences.
The statistical significance of the user evaluation results was evaluated using MANOVA. If the survey sample does not satisfy the normality condition, serious errors in the analysis results may occur, so the normality test was first performed. Thus, the Shapiro–Wilk test was used to examine whether the difference between the Likert-scale value when using the controller only and the Likert-scale value when using the HapTug device and controller together satisfied the normality condition. In the results, realism (
p = 0.218), immersion (
p = 0.102), and enjoyment (
p = 0.368) all had
p-values higher than 0.05, as shown in
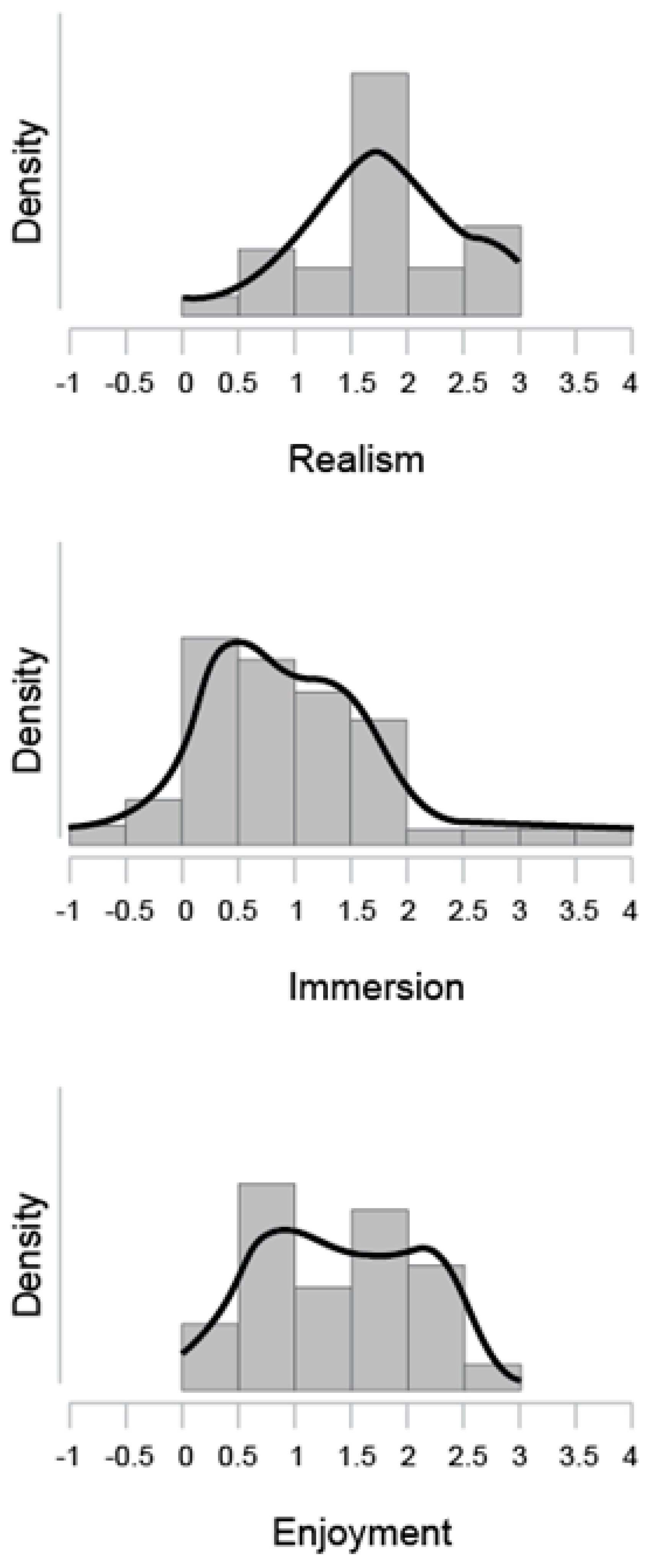
Table 4, which meant that the null hypothesis could not be rejected. Therefore, normality was satisfied. Furthermore, it can be observed that the density graphs in
Figure 9 resemble normal distributions.
MANOVA was used for statistical analyses. Pillai’s test statistic = 0.791. The results for realism (F1, 58 = 127.817, p < 0.001), immersion (F1, 58 = 44.515, p < 0.001), and enjoyment (F1, 58 = 75.417, p < 0.001) were all statistically significant; thus, the null hypothesis was rejected because the p-values were all lower than 0.05. Therefore, it is safe to say that there are significant differences in realism, immersion, and enjoyment when only the VR bundle controller is used versus when the HapTug device and the controller are used together.
5.5. Result of Interviews
Representative answers are presented as follows (these answers were translated into English from the experimenters’ native language):
“If I must point out a shortcoming, the sound and vibration of the motor made me realize, ‘Oh, this is a motor’. Hence it can be recognized that this is not a real sense. But it was much better than nothing.”
(31 years old/male/less than an hour)
“Dog content’s force was a little weaker than it actually was. But it’s much more fun than playing without equipment.”
(29 years old/female/more than 10 h)
“I know it’s a virtual feeling, but when I swing a tool, I grab the controller hard”
(34 years old/male/more than 10 h)
“I felt like the video quality had improved with the instrument on my wrist. I haven’t played VR much, but I hope these devices will be properly commercialized so that I can experience the virtual environment anywhere.”
(30 years old/male/less than an hour)
“It was a better and fun experience than proceeding without a controller…”
(28 years old/male/more than 10 h)
When considering these evaluations in the interviews, the experience of using a haptic device felt slightly different from reality, but it attracted more interest to the virtual reality experience.
When the questionnaire and interview responses were compared and analyzed, it was found that the standards of realism and similarity that users expect from the haptic experience are generally low. For example, even participants who replied that the realism and immersion provided by the haptic device were low answered that they had a more satisfying experience compared to when they played the content using only the bundle controller. In other words, it was determined that users have more satisfying experiences with the haptic device compared to conventional VR environments, irrespective of the scale of similarity of the haptic-device-based experience to the real-world experience.
“…my wrist was not good, so it was a little too much to experience the content.”
(28 years old/male/more than 10 h)
“I think the device didn’t fit well because my wrist and hands were smaller than others. However, the fencing content was quite realistic.”
(28 years old/female/less than 10 h)
“I have a little VR sickness, but I think it will be more get as I use it. But my wrist hurt a little. I think it’s because it’s too tight. However, if you make it loose, it will be difficult to feel the haptic properly. Nonetheless, the sense of haptic is quite similar to reality, so if only the wearable part is improved, I think I can experience virtual reality longer.”
(31 years old/male/more than 10 h)
Considering these answers through the affinity diagram process, a few participants in the study pointed out that it was cumbersome to wear the haptic device. The wear convenience issue needs to be considered in the future in the design of handheld haptic devices. It was determined that the realism of VR content varies depending on the convenience of wearing the handheld haptic device, which was secured for HapTug through some prototype changes.
6. User Experiment 3
In order to obtain higher objectivity, the third experiment was evaluated quantitatively. Moreover, this experimental process minimized user subconscious bias by eliminating the wearing process of the device. In Experiment 3, the HapTug was evaluated with respect to playback time, range of operation, and number of interactions.
6.1. Participants
Participants were not the same as those taking part in previous experiments. A total of 41 participants took part (16 of whom were male), all of whom were right-handed and in their 20s and 40s (mean, 27 years old; SD, 3.9), representing various nationalities. In Experiment 2, there was no significant difference according to the VR experience time. Thus, VR experience time was not considered in Experiment 3.
6.2. VR Content
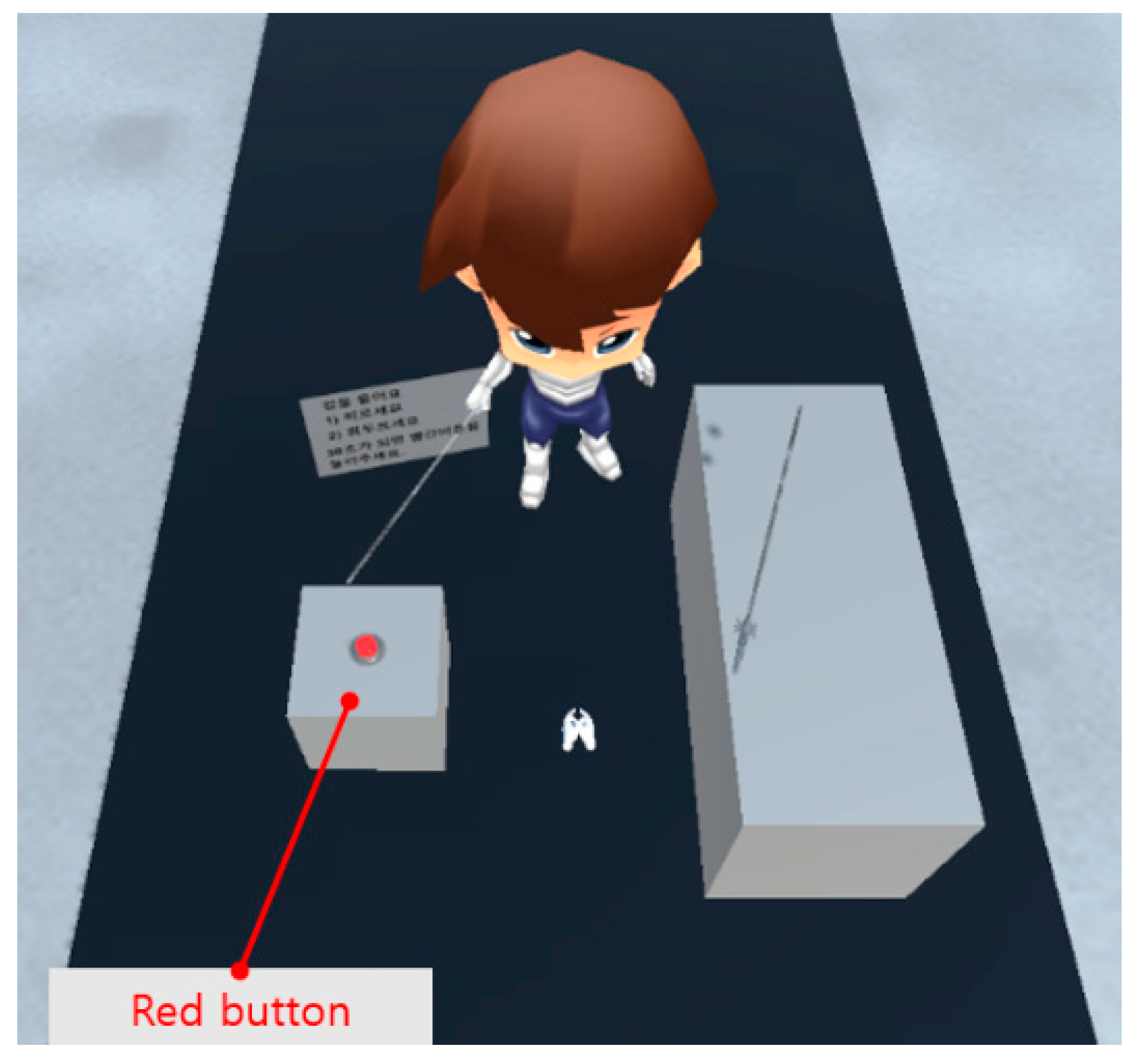
Among the games used in the previous experiment, the fencing game, which has the most free interaction frequency and range, was modified and used. The fencing interactions remained the same, and fishing interactions were added. The game was designed to create the sensation of the tool being pulled from the hand by centrifugal force when the user swings the sword. As shown in
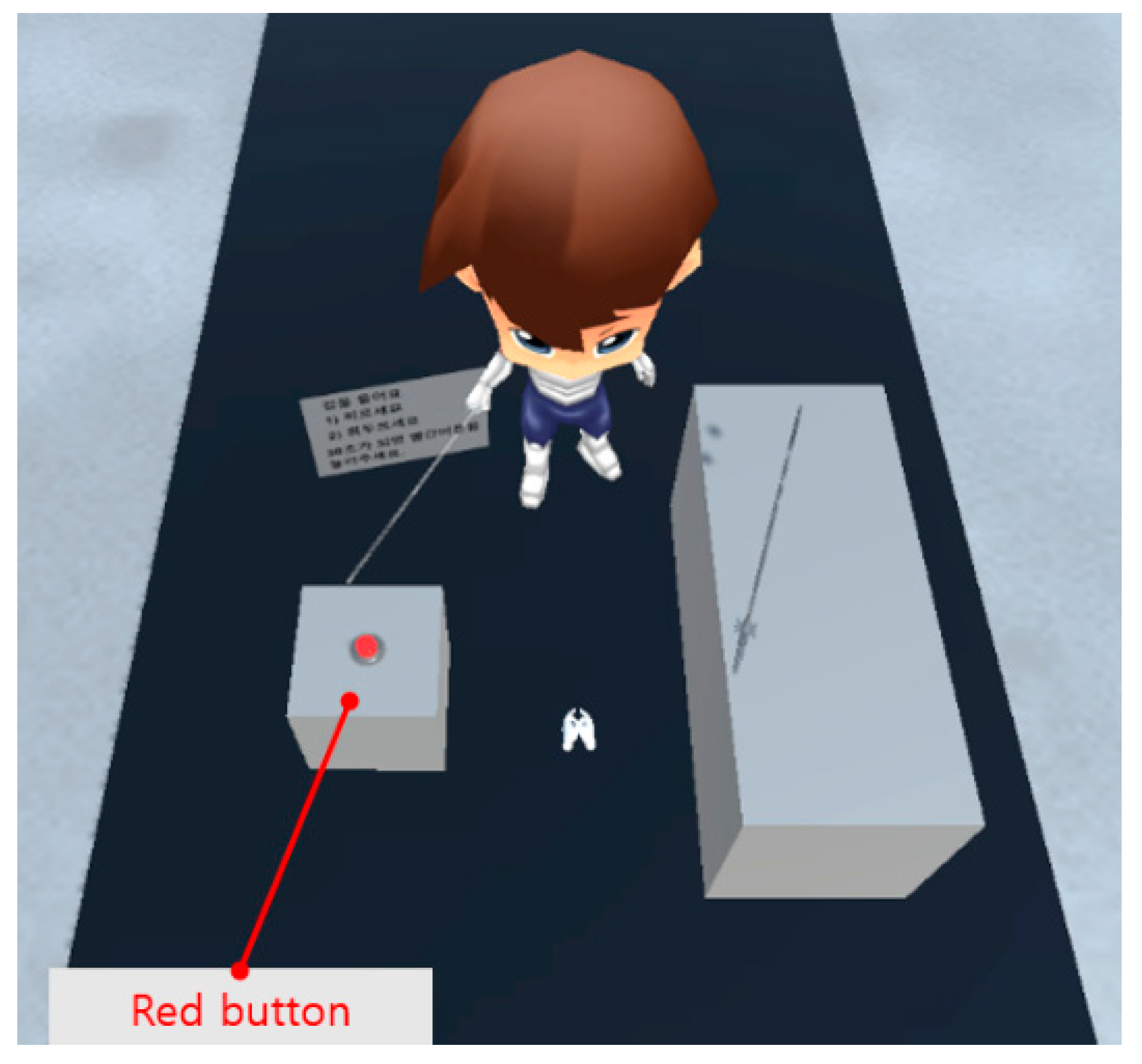
Figure 10, a “game end” button that can easily measure the duration of the game was added. All settings, such as the angle and torque of the device, were designed in the same way as in the previous experiment.
6.3. Task and Procedure
The experiment was conducted by users wearing the HapTug and experiencing the fencing game six times. Participants were free to interact during the session and press the red button if they thought 30 s had passed. Each time the button was pressed, the operation of the HapTug was randomly determined. Participants could experience three game sessions each under two conditions—haptic + vibration and vibration only—and the session order was unknown. The reason for this setting is that previous experiments considered the process of wearing the HapTug, which may have influenced the user’s subconscious bias.
During the experiment, the user was scored by measuring the number of collisions with the object (hit) and the number of times the tool was swung over a specific range (swing). However, the participants did not know their score. Because the participants’ playback times were different, the scores were divided into time units and measured under the same conditions. In addition, the playback time of each session was measured. To reduce noise, the average value of the results from three sessions of the same condition was taken.
6.4. Results
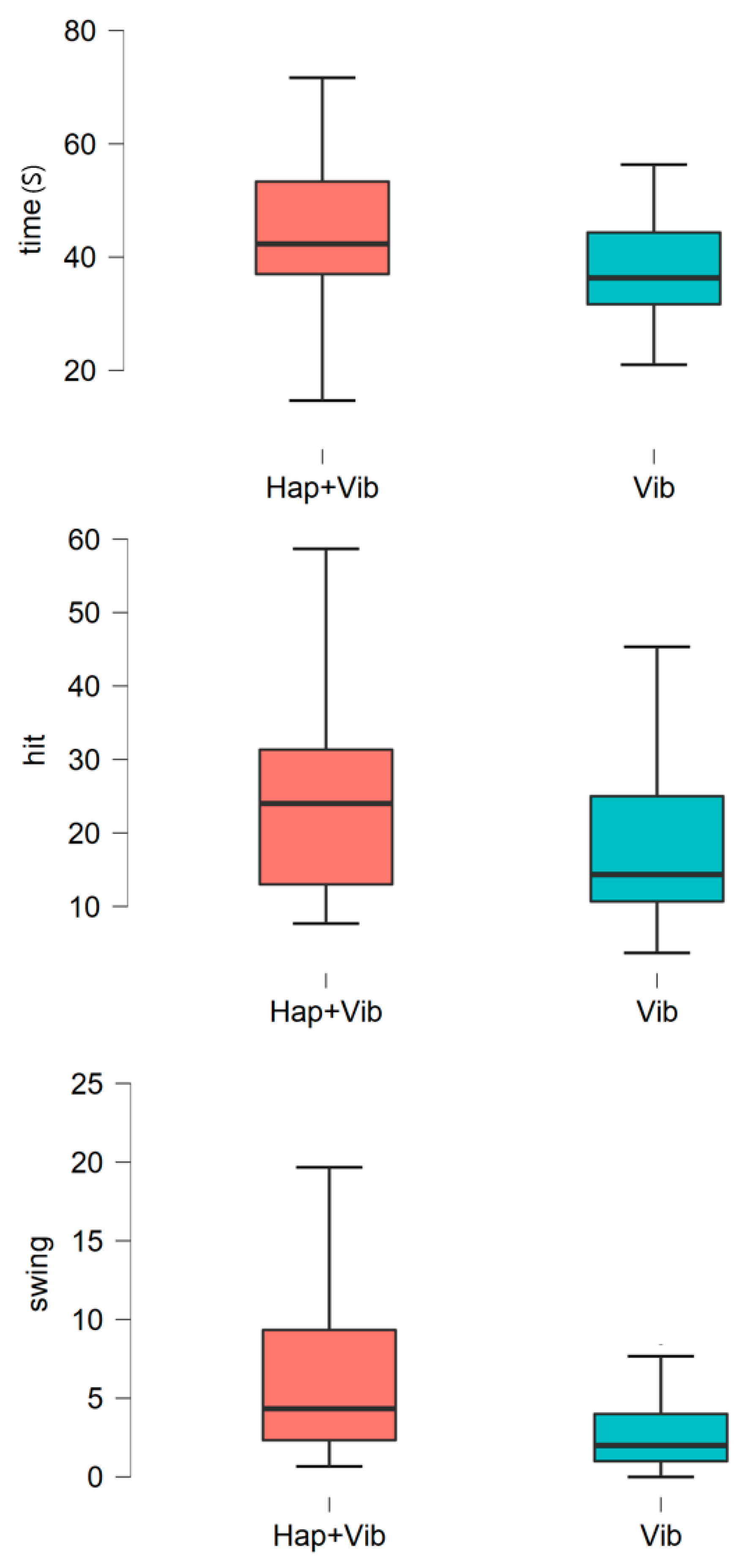
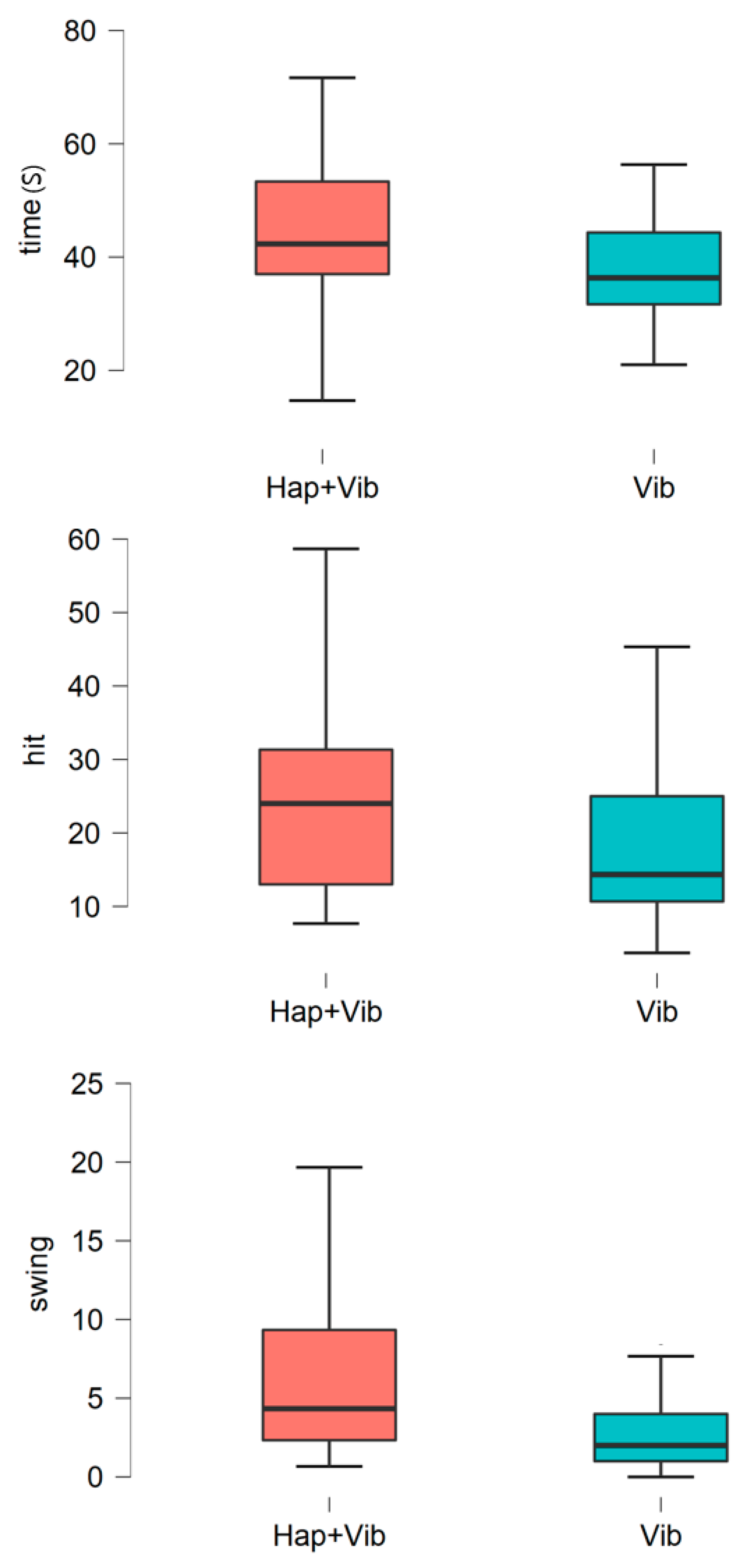
When the HapTug is activated—which provides the feeling of haptic feedback and vibration—the user is more immersed in the game. This is supported by the fact that, as shown in
Figure 11, the user was not more aware of the playback time [
39]. Furthermore, users interacted more often per unit time in the game when haptics were activated.
These differences were further confirmed by multivariate analysis of variance (MANOVA): Pillai’s test statistic = 0.169; the results for time (F1, 80 = 12.491, p < 0.001), hit (F1, 80 = 4.037, p = 0.048), and swing (F1, 80 = 10.285, p = 0.002) were all statistically significant. Thus, the null hypothesis was rejected because the p-values were all lower than 0.05. This means that the user becomes more immersed, and the range of operation of the interaction is larger when the HapTug is activated. When there is only vibration, the user moves more simply.
7. Discussion
In this study, it was confirmed that the HapTug haptic device enhances the VR experience and provides increased satisfaction to users within the experimental environment setup. Nevertheless, there are some limitations to the device.
First of all, there is a battery issue. Three 9V alkaline batteries were used during Experiments 2 and 3. The HapTug prototype does not contain a standby power shutoff, so it may consume power quickly. Even so, it consumes power much faster than vibration motors. Secondly, realistic haptics require different settings depending on the user’s hand size and grip strength. Some participants expressed opinions that the haptics were too powerful. Finally, there was an issue of discomfort in wearing the device. Some participants also pointed out that it was cumbersome to wear the haptic device. The wrist should be able to fully support the reaction force. To this end, a wrist strap was designed to wrap around the wrist twice, but this causes discomfort when wearing. Despite the existence of these restrictions, it is hoped that such issues will be resolved with the development of technology.
8. Conclusions
In this paper, we described the design and evaluation of the HapTug device, which generates pushing and pulling forces. In this process, there were several incidental findings to consider.
The first is that the previous VR experience time does not significantly affect the haptic experience. As confirmed in User Experiment 2, the results would be more certain if there were a dedicated experimental design and a larger sample size to judge this. The second is that the standards of realism and similarity that users expect from haptic experiences are generally low. This is because participants had a more satisfying experience compared to when they engaged with the content using only the bundle controller, even those who replied that the realism and the level of immersion were low. This conclusion was drawn through analysis of the survey results, and it would be clearer if there were an experimental design that could be analyzed objectively and statistically. Lastly, the use of a haptic device provides a wider range of motion for the user to carry out. In User Experiment 3, the score measured by moving the sword beyond a specific range showed a greater difference than simply measuring the collision with the object. During the experiment, we were able to observe that the range of motion of users’ hands was much larger when the haptic device was activated. It would be useful to confirm this interesting finding more clearly.
HapTug provides force feedback, which has not previously been considered. Force feedback focuses not only on the occurrence of an event but also creates a feeling of pushing and pulling more before and after the event. With the advancement of such haptic feedback technology, enhancements are expected in the cognitive ability of users in conjunction with improvements to safety and productivity in the medical and industrial sectors, in which AR/VR technology is actively used.
Author Contributions
Conceptualization, J.L. and Y.C.; methodology, J.L.; software, J.L.; validation, J.L. and Y.C.; investigation, J.L.; writing—original draft preparation, J.L.; writing—review and editing, Y.C.; visualization, J.L.; supervision, Y.C.; project administration, J.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by a Korea Institute for Advancement of Technology (KIAT) grant funded by the Korea Government (MOTIE) (P0012746, the Competency Development Program for Industry Specialist).
Institutional Review Board Statement
This study is based on the first author’s master’s work and includes human subjects. However, the users’ personal identification information used in this study did not include personal information other than age and gender information. Thus, ethical review and approval were not required for the study on human participants, in accordance with local legislation and institutional requirements.
Informed Consent Statement
Written informed consent was obtained from the interview and user study participants to publish this paper.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Stamer, M.; Michaels, J.; Tümler, J. Investigating the Benefits of Haptic Feedback during In-Car Interactions in Virtual Reality. In Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2020; pp. 404–416. [Google Scholar]
- Aguerreche, L.; Duval, T.; Lécuyer, A. Reconfigurable Tangible Devices for 3D Virtual Object Manipulation by Single or Multiple Users. In Proceedings of the 17th ACM Symposium on Virtual Reality Software and Technology—VRST ’10, Hong Kong, China, 22–24 November 2010; ACM Press: New York, NY, USA, 2010. [Google Scholar]
- Slater, M. Place Illusion and Plausibility Can Lead to Realistic Behaviour in Immersive Virtual Environments. Philos. Trans. R. Soc. Lond. B Biol. Sci. 2009, 364, 3549–3557. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Okamura, A.M.; Cutkosky, M.R.; Dennerlein, J.T. Reality-Based Models for Vibration Feedback in Virtual Environments. IEEE ASME Trans. Mechatron. 2001, 6, 245–252. [Google Scholar] [CrossRef] [Green Version]
- Yoshida, S.; Sun, Y.; Kuzuoka, H. PoCoPo: Handheld Pin-Based Shape Display for Haptic Rendering in Virtual Reality. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; ACM: New York, NY, USA, 2020. [Google Scholar]
- Pacchierotti, C.; Sinclair, S.; Solazzi, M.; Frisoli, A.; Hayward, V.; Prattichizzo, D. Wearable Haptic Systems for the Fingertip and the Hand: Taxonomy, Review, and Perspectives. IEEE Trans. Haptics 2017, 10, 580–600. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Monnai, Y.; Hasegawa, K.; Fujiwara, M.; Yoshino, K.; Inoue, S.; Shinoda, H. HaptoMime: Mid-Air Haptic Interaction with a Floating Virtual Screen. In Proceedings of the 27th Annual ACM Symposium on User Interface Software and Technology—UIST’ 14, Honolulu, HI, USA, 5–8 October 2014; ACM Press: New York, NY, USA, 2014. [Google Scholar]
- Benali-Khoudjal, M.; Hafez, M.; Alexandre, J.-M.; Benachour, J.; Kheddar, A. Thermal Feedback Model for Virtual Reality. In Proceedings of the MHS2003. International Symposium on Micromechatronics and Human Science (IEEE Cat. No. 03TH8717), Nagoya, Japan, 19–22 October 2003; IEEE: Piscataway, NJ, USA, 2004. [Google Scholar]
- Whitmire, E.; Benko, H.; Holz, C.; Ofek, E.; Sinclair, M. Haptic Revolver: Touch, Shear, Texture, and Shape Rendering on a Reconfigurable Virtual Reality Controller. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; ACM: New York, NY, USA, 2018. [Google Scholar]
- Heo, S.; Lee, J.; Wigdor, D. PseudoBend: Producing Haptic Illusions of Stretching, Bending, and Twisting Using Grain Vibrations. In Proceedings of the 32nd Annual ACM Symposium on User Interface Software and Technology, New Orleans, LA, USA, 20–23 October 2019; ACM: New York, NY, USA, 2019. [Google Scholar]
- Traylor, R.M.; Wilhelm, D.; Adelstein, B.D.; Tan, H.Z. Design Considerations for Stand-Alone Haptic Interfaces Communicating via UDP Protocol. In Proceedings of the First Joint Eurohaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Pisa, Italy, 18–20 March 2005; IEEE: Piscataway, NJ, USA, 2005. [Google Scholar]
- Stocco, L.J.; Salcudean, S.E.; Sassani, F. Optimal Kinematic Design of a Haptic Pen. IEEE ASME Trans. Mechatron. 2001, 6, 210–220. [Google Scholar] [CrossRef] [Green Version]
- Lambelet, C.; Lyu, M.; Woolley, D.; Gassert, R.; Wenderoth, N. The EWrist—A Wearable Wrist Exoskeleton with SEMG-Based Force Control for Stroke Rehabilitation. IEEE Int. Conf. Rehabil. Robot. 2017, 2017, 726–733. [Google Scholar] [CrossRef] [PubMed]
- Je, S.; Lee, H.; Kim, M.J.; Bianchi, A. Wind-Blaster: A Wearable Propeller-Based Prototype That Provides Ungrounded Force-Feedback. In Proceedings of the SIGGRAPH ‘18: Special Interest Group on Computer Graphics and Interactive Techniques Conference, Vancouver, BC, Canada, 12–16 August 2018; ACM: New York, NY, USA, 2018. [Google Scholar]
- Solazzi, M.; Frisoli, A.; Bergamasco, M. Design of a Novel Finger Haptic Interface for Contact and Orientation Display. In Proceedings of the 2010 IEEE Haptics Symposium, Waltham, MA, USA, 25–26 March 2010; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Chinello, F.; Malvezzi, M.; Pacchierotti, C.; Prattichizzo, D. Design and Development of a 3RRS Wearable Fingertip Cutaneous Device. In Proceedings of the 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, Korea, 7–11 July 2015; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar]
- Gu, X.; Zhang, Y.; Sun, W.; Bian, Y.; Zhou, D.; Kristensson, P.O. Dexmo: An Inexpensive and Lightweight Mechanical Exoskeleton for Motion Capture and Force Feedback in VR. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems, San Jose, CA, USA, 7–12 May 2016; ACM: New York, NY, USA, 2016. [Google Scholar]
- Hinchet, R.; Vechev, V.; Shea, H.; Hilliges, O. DextrES: Wearable Haptic Feedback for Grasping in VR via a Thin Form-Factor Electrostatic Brake. In Proceedings of the 31st Annual ACM Symposium on User Interface Software and Technology—UIST ‘18, Berlin, Germany, 14 October 2018; ACM Press: New York, NY, USA, 2018. [Google Scholar]
- Jadhav, S.; Kannanda, V.; Kang, B.; Tolley, M.T.; Schulze, J.P. Soft Robotic Glove for Kinesthetic Haptic Feedback in Virtual Reality Environments. Electron. Imaging 2017, 2017, 19–24. [Google Scholar] [CrossRef] [Green Version]
- Baik, S.; Park, S.; Park, J. Haptic Glove Using Tendon-Driven Soft Robotic Mechanism. Front. Bioeng. Biotechnol. 2020, 8, 541105. [Google Scholar] [CrossRef] [PubMed]
- Iqbal, J.; Tsagarakis, N.G.; Caldwell, D.G. Four-fingered Lightweight Exoskeleton Robotic Device Accommodating Different Hand Sizes. Electron. Lett. 2015, 51, 888–890. [Google Scholar] [CrossRef]
- Heo, S.; Chung, C.; Lee, G.; Wigdor, D. Thor’s Hammer: An Ungrounded Force Feedback Device Utilizing Propeller-Induced Propulsive Force. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; ACM: New York, NY, USA, 2018. [Google Scholar]
- Sasaki, T.; Hartanto, R.S.; Liu, K.-H.; Tsuchiya, K.; Hiyama, A.; Inami, M. Leviopole: Mid-Air Haptic Interactions Using Multirotor. In Proceedings of the SIGGRAPH ‘18: Special Interest Group on Computer Graphics and Interactive Techniques Conference, Vancouver, BC, Canada, 12–16 August 2018; ACM: New York, NY, USA, 2018. [Google Scholar]
- Zenner, A.; Krüger, A. Drag:On: A Virtual Reality Controller Providing Haptic Feedback Based on Drag and Weight Shift. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, UK, 4–9 May 2019; ACM: New York, NY, USA, 2019. [Google Scholar]
- Shigeyama, J.; Hashimoto, T.; Yoshida, S.; Narumi, T.; Tanikawa, T.; Hirose, M. Transcalibur: A Weight Shifting Virtual Reality Controller for 2d Shape Rendering Based on Computational Perception Model. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, UK, 4–9 May 2019; pp. 1–11. [Google Scholar]
- Ryu, N.; Lee, W.; Kim, M.J.; Bianchi, A. ElaStick: A Handheld Variable Stiffness Display for Rendering Dynamic Haptic Response of Flexible Object. In Proceedings of the 33rd Annual ACM Symposium on User Interface Software and Technology, Virtual, 20–23 October 2020; ACM: New York, NY, USA, 2020. [Google Scholar]
- Cheng, C.H.; Chang, C.C.; Chen, Y.H.; Lin, Y.L.; Huang, J.Y.; Han, P.H.; Lee, L.C. GravityCup: A Liquid-Based Haptics for Simulating Dynamic Weight in Virtual Reality. In Proceedings of the 24th ACM Symposium on Virtual Reality Software and Technology, Tokyo, Japan, 28 November–1 December 2018. [Google Scholar]
- Wei, T.-Y.; Tsai, H.-R.; Liao, Y.-S.; Tsai, C.; Chen, Y.-S.; Wang, C.; Chen, B.-Y. ElastiLinks: Force Feedback between VR Controllers with Dynamic Points of Application of Force. In Proceedings of the 33rd Annual ACM Symposium on User Interface Software and Technology, Virtual, 20–23 October 2020; ACM: New York, NY, USA, 2020. [Google Scholar]
- Fang, C.; Zhang, Y.; Dworman, M.; Harrison, C. Wireality: Enabling Complex Tangible Geometries in Virtual Reality with Worn Multi-String Haptics. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; ACM: New York, NY, USA, 2020. [Google Scholar]
- Choi, I.; Culbertson, H.; Miller, M.R.; Olwal, A.; Follmer, S. Grabity: A Wearable Haptic Interface for Simulating Weight and Grasping in Virtual Reality. In Proceedings of the 30th Annual ACM Symposium on User Interface Software and Technology, Quebec City, QC, Canada, 22–25 October 2017. [Google Scholar]
- Monteiro, D.; Liang, H.-N.; Wang, X.; Xu, W.; Tu, H. Design and Development of a Low-Cost Device for Weight and Center of Gravity Simulation in Virtual Reality. In Proceedings of the 2021 International Conference on Multimodal Interaction, Ottawa, QC, USA, 18–22 October 2021; ACM: New York, NY, USA, 2021. [Google Scholar]
- Wang, X.; Monteiro, D.; Lee, L.-H.; Hui, P.; Liang, H.-N. VibroWeight: Simulating Weight and Center of Gravity Changes of Objects in Virtual Reality for Enhanced Realism. In Proceedings of the 2022 IEEE Haptics Symposium (HAPTICS), Santa Barbara, CA, USA, 21–24 March 2022; IEEE: Piscataway, NJ, USA, 2022. [Google Scholar]
- Kucuk, S.; Bingul, Z. Robot Kinematics: Forward and Inverse Kinematics; INTECH Open Access Publisher: London, UK, 2006. [Google Scholar]
- Lopes, P.; You, S.; Cheng, L.-P.; Marwecki, S.; Baudisch, P. Providing Haptics to Walls & Heavy Objects in Virtual Reality by Means of Electrical Muscle Stimulation. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; ACM: New York, NY, USA, 2017. [Google Scholar]
- Je, S.; Kim, M.J.; Lee, W.; Lee, B.; Yang, X.-D.; Lopes, P.; Bianchi, A. Aero-Plane: A Handheld Force-Feedback Device That Renders Weight Motion Illusion on a Virtual 2D Plane. In Proceedings of the 32nd Annual ACM Symposium on User Interface Software and Technology, New Orleans, LA, USA, 20–23 October 2019; ACM: New York, NY, USA, 2019. [Google Scholar]
- Carbonell-Carrera, C.; Saorin, J.L.; Díaz, D. User VR Experience and Motivation Study in an Immersive 3D Geovisualization Environment Using a Game Engine for Landscape Design Teaching. Land 2021, 10, 492. [Google Scholar] [CrossRef]
- Tcha-Tokey, K.; Loup-Escande, E.; Christmann, O.; Richir, S. A Questionnaire to Measure the User Experience in Immersive Virtual Environments. In Proceedings of the 2016 Virtual Reality International Conference, Laval, France, 23–25 March 2016; ACM: New York, NY, USA, 2016. [Google Scholar]
- Witmer, B.G.; Singer, M.J. Measuring Presence in Virtual Environments: A Presence Questionnaire. Presence 1998, 7, 225–240. [Google Scholar] [CrossRef]
- Wood, R.T.; Griffiths, M.D.; Parke, A. Experiences of Time Loss among Videogame Players: An Empirical study. CyberPsychology Behav. 2007, 10, 38–44. [Google Scholar] [CrossRef]
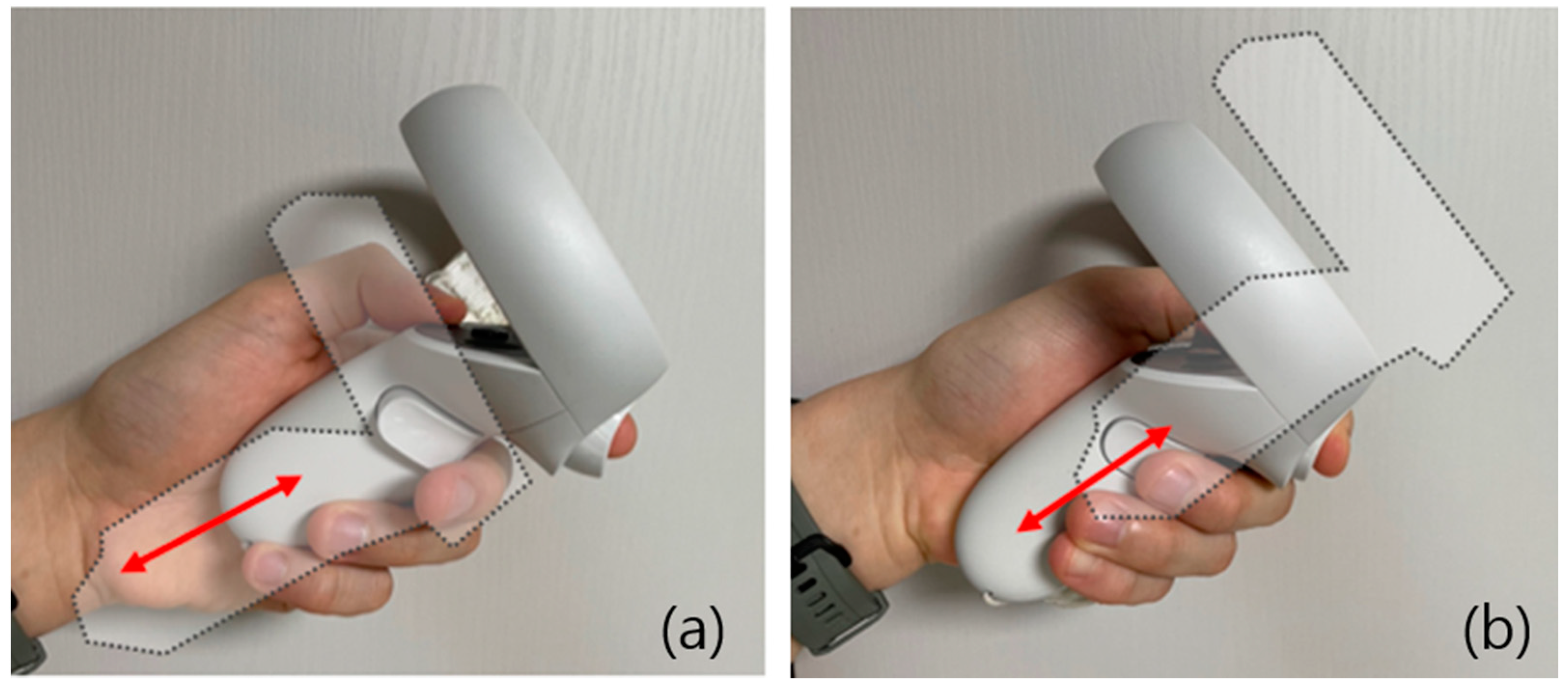
Figure 1.
Force of pushing in or pulling out of the tool in the hand to simulate wielding a tool or interacting with an object. (a) Feeling of the tool being pushed into the hand when interacting with a VR object; (b) feeling of the tool being pulled out of the hand when swinging or interacting with a VR object.
Figure 1.
Force of pushing in or pulling out of the tool in the hand to simulate wielding a tool or interacting with an object. (a) Feeling of the tool being pushed into the hand when interacting with a VR object; (b) feeling of the tool being pulled out of the hand when swinging or interacting with a VR object.
Figure 2.
Shape of the prototype device connected to the controller: (a) front view; (b) back view; (c) side view 1; (d) side view 2; (e) 3D model.
Figure 2.
Shape of the prototype device connected to the controller: (a) front view; (b) back view; (c) side view 1; (d) side view 2; (e) 3D model.
Figure 3.
The lower part of the device in the Cartesian co-ordinate plane was used to determine the default position of the device.
Figure 3.
The lower part of the device in the Cartesian co-ordinate plane was used to determine the default position of the device.
Figure 4.
Content involving the use of wooden sticks to compare the feeling of using tools in the real world with that of virtual reality haptics.
Figure 4.
Content involving the use of wooden sticks to compare the feeling of using tools in the real world with that of virtual reality haptics.
Figure 5.
The seven-point Likert scale scores of vibrations and HapTug for two sensations.
Figure 5.
The seven-point Likert scale scores of vibrations and HapTug for two sensations.
Figure 6.
Three content types for experiencing haptics: (a) a dog tug game, in which the user feels that the tool is pulled out of the hand due to interaction with an object; (b) a fishing game, in which centrifugal force can be felt when swinging the tool; and (c) a fencing game, in which the user feels the tool pushed into the hand due to interaction with an object.
Figure 6.
Three content types for experiencing haptics: (a) a dog tug game, in which the user feels that the tool is pulled out of the hand due to interaction with an object; (b) a fishing game, in which centrifugal force can be felt when swinging the tool; and (c) a fencing game, in which the user feels the tool pushed into the hand due to interaction with an object.
Figure 7.
User evaluation experiment (a) using only the controller and (b) using the haptic device and the controller together; (c) examples of screens seen by the participants during the experiment.
Figure 7.
User evaluation experiment (a) using only the controller and (b) using the haptic device and the controller together; (c) examples of screens seen by the participants during the experiment.
Figure 8.
Average Likert-scale scores for realism, immersion, and enjoyment (A: when only the controller was used; B: when the HapTug device and the controller were used together).
Figure 8.
Average Likert-scale scores for realism, immersion, and enjoyment (A: when only the controller was used; B: when the HapTug device and the controller were used together).
Figure 9.
Densities according to the Likert-scale score differences for realism, immersion, and enjoyment.
Figure 9.
Densities according to the Likert-scale score differences for realism, immersion, and enjoyment.
Figure 10.
A new fencing game in which the user feels the tool pushed into the hand due to interaction with an object and in which centrifugal force can be felt when swinging the tool.
Figure 10.
A new fencing game in which the user feels the tool pushed into the hand due to interaction with an object and in which centrifugal force can be felt when swinging the tool.
Figure 11.
Averages for time (seconds), hit score per unit time, and swing score per unit time.
Figure 11.
Averages for time (seconds), hit score per unit time, and swing score per unit time.
Table 1.
Measurement of force that the HapTug can exert at the default position (unit: N).
Table 1.
Measurement of force that the HapTug can exert at the default position (unit: N).
| Measurement Number | Vertical Direction to Arm
(Up, Down) | Horizontal Direction to Arm (Front, Back) |
|---|
| When Pushing | When Pulling | When Pushing | When Pulling |
|---|
| 1st | 11.1 | 12.5 | 11.8 | 13.3 |
| 2nd | 12.5 | 12.6 | 12.3 | 12.8 |
| 3rd | 12.5 | 11.9 | 11.4 | 13.2 |
| 4th | 10.3 | 12.1 | 12.3 | 13.9 |
| 5th | 11.2 | 11.2 | 11.9 | 13.3 |
| Mean | 11.5 | 12.1 | 11.9 | 13.3 |
Table 2.
Questionnaire and interview items.
Table 2.
Questionnaire and interview items.
| Category | Questionnaire |
|---|
| Realism | My experience in virtual reality was completely consistent with the experience in real life. |
| The various sensory information from experiencing virtual reality was not cut off and was consistent with reality. |
| The interaction within virtual reality was natural. |
| The haptics and virtual space reflected my movement in real time. |
| Immersion | I was so focused in the experiment that I forgot the experience time. |
| After the experiment, I felt proficient in interaction in virtual reality. |
| I adapted very quickly to the virtual reality experience. |
| The hands I saw in the virtual space felt like my own hands. |
| Enjoyment | The virtual reality experiment session was fun. |
| I want to experience this experiment session again. |
| I felt a sense of accomplishment while experiencing virtual reality content. |
| I would recommend this experiment session to others. |
| Interview | What was particularly good about using the device? |
| What was inconvenient or unpleasant about using the device? |
| If there could be a complement to the device, what would it be? |
| Please feel free to talk about your experience using the device. |
Table 3.
Homogeneity test based on different sequential orders of experiments.
Table 3.
Homogeneity test based on different sequential orders of experiments.
| Questionnaire Items | W | p |
|---|
| Realism when using controller (vibration) | 62.000 | 0.571 |
| Immersion when using controller (vibration) | 30.000 | 0.824 |
| Enjoyment when using controller (vibration) | 71.500 | 0.245 |
| Realism when using controller with HapTug (vibration + haptics) | 64.500 | 0.820 |
| Immersion when using controller with HapTug (vibration + haptics) | 22.500 | 0.645 |
| Enjoyment when using controller with HapTug (vibration + haptics) | 63.000 | 0.526 |
Table 4.
Normality test results of the difference between Likert-scale result values.
Table 4.
Normality test results of the difference between Likert-scale result values.
| Item | W | p |
|---|
| Difference in realism results | 0.954 | 0.218 |
| Difference in immersion results | 0.942 | 0.102 |
| Difference in enjoyment results | 0.963 | 0.368 |
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}