
A Modified Dynamic Model of Single-Sided Linear Induction Motors Considering Longitudinal and Transversal Effects

 ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  and
and
Abstract
1. Introduction
2. A Review of Duncan’s Equivalent Circuit Model of LIM
3. Proposed Dynamic Equivalent Circuit Model of LIM
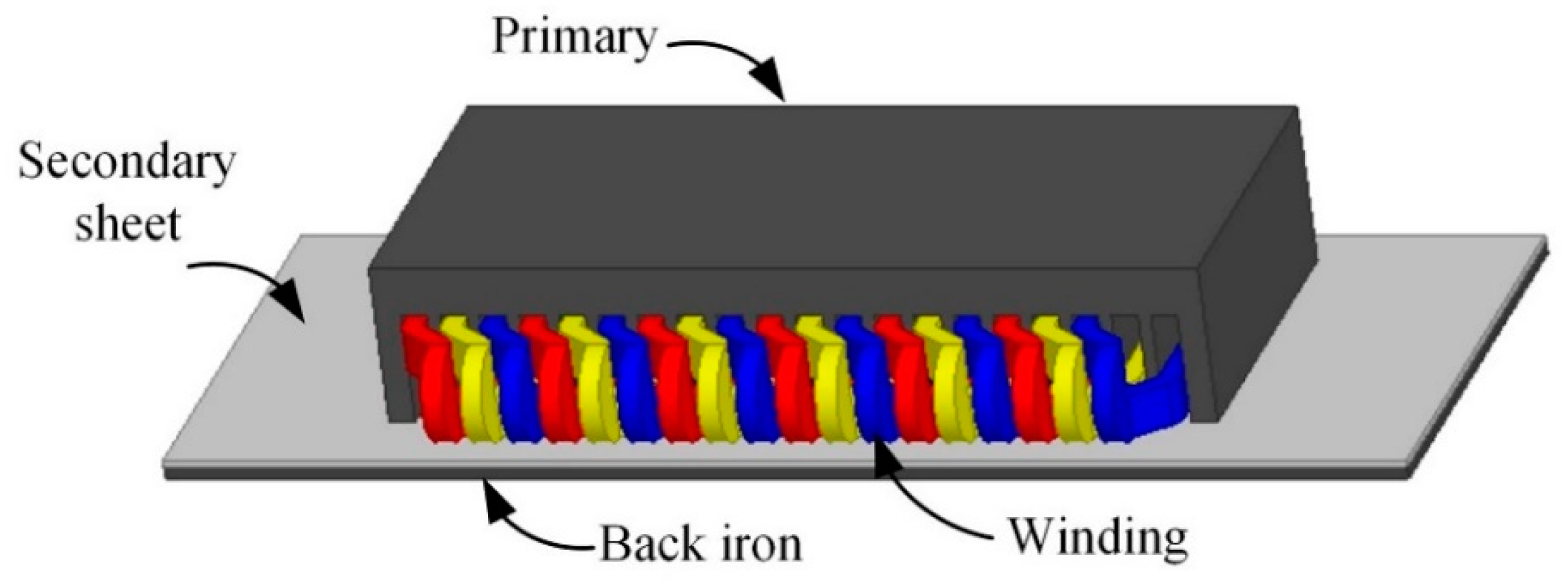
3.1. Preliminary Remarks
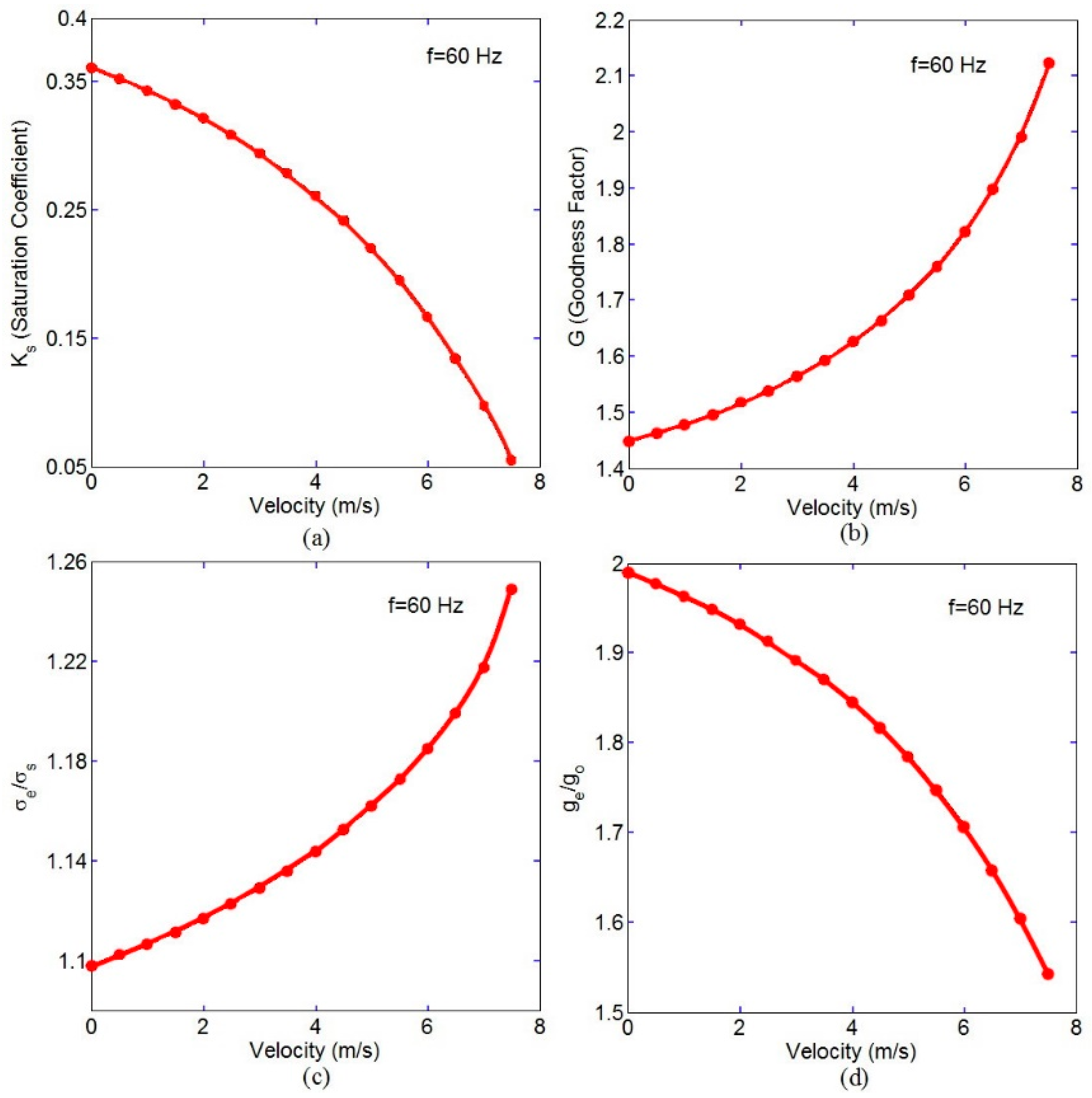
3.2. Transverse Edge Effect
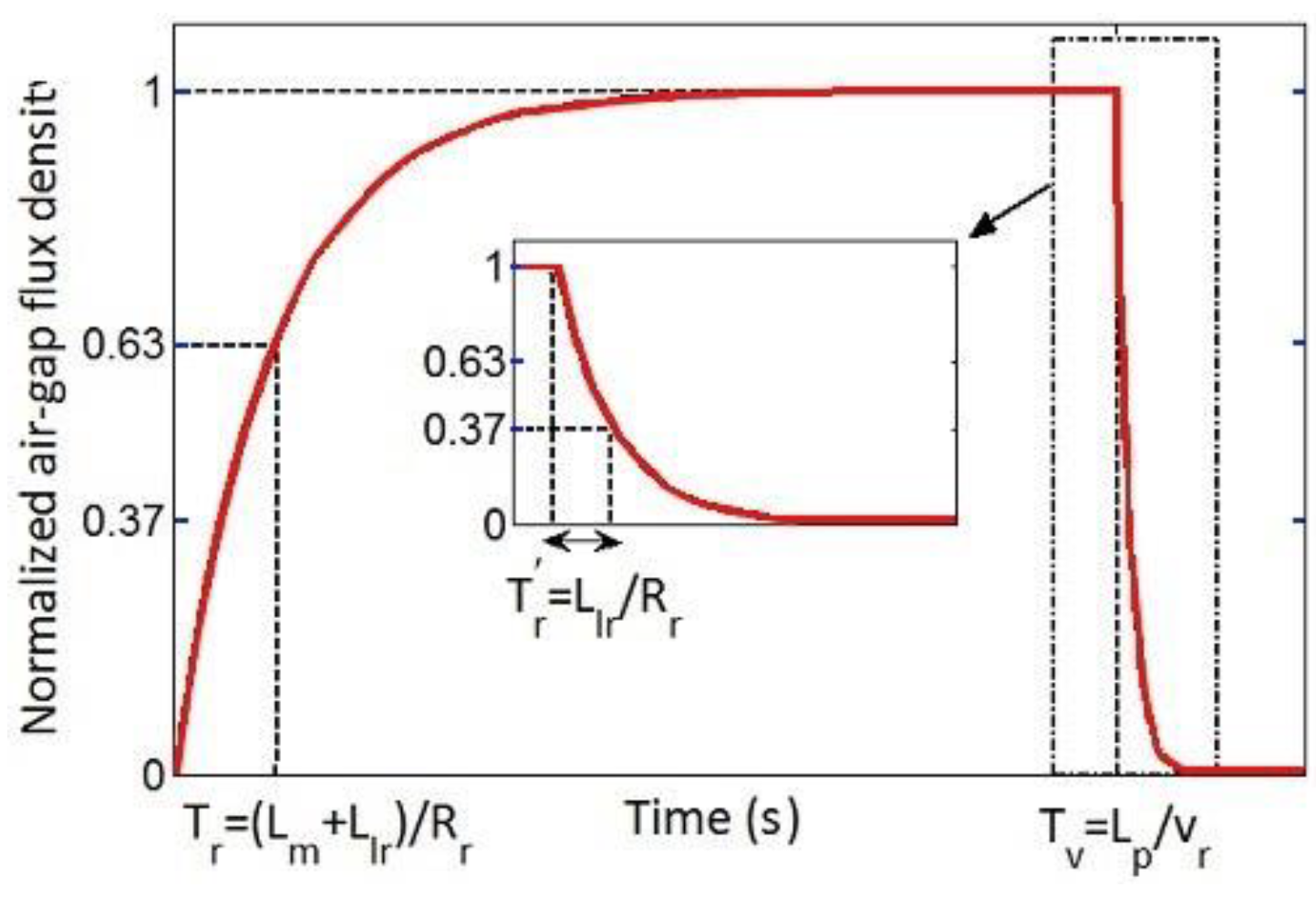
3.3. Iron Saturation Effect, Skin Effect, and the Air-Gap Leakage Effect
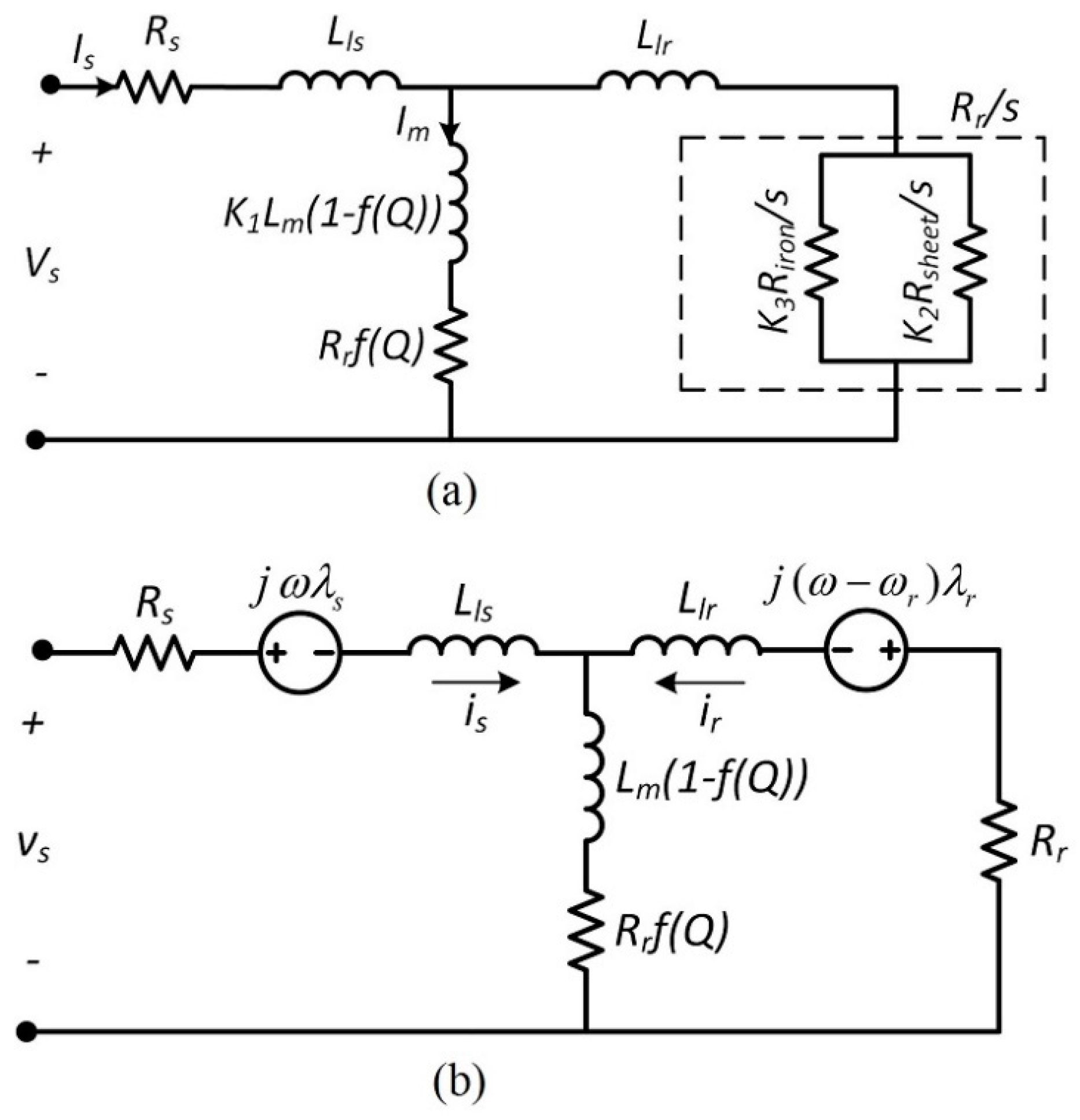
3.4. Proposed Dynamic Model
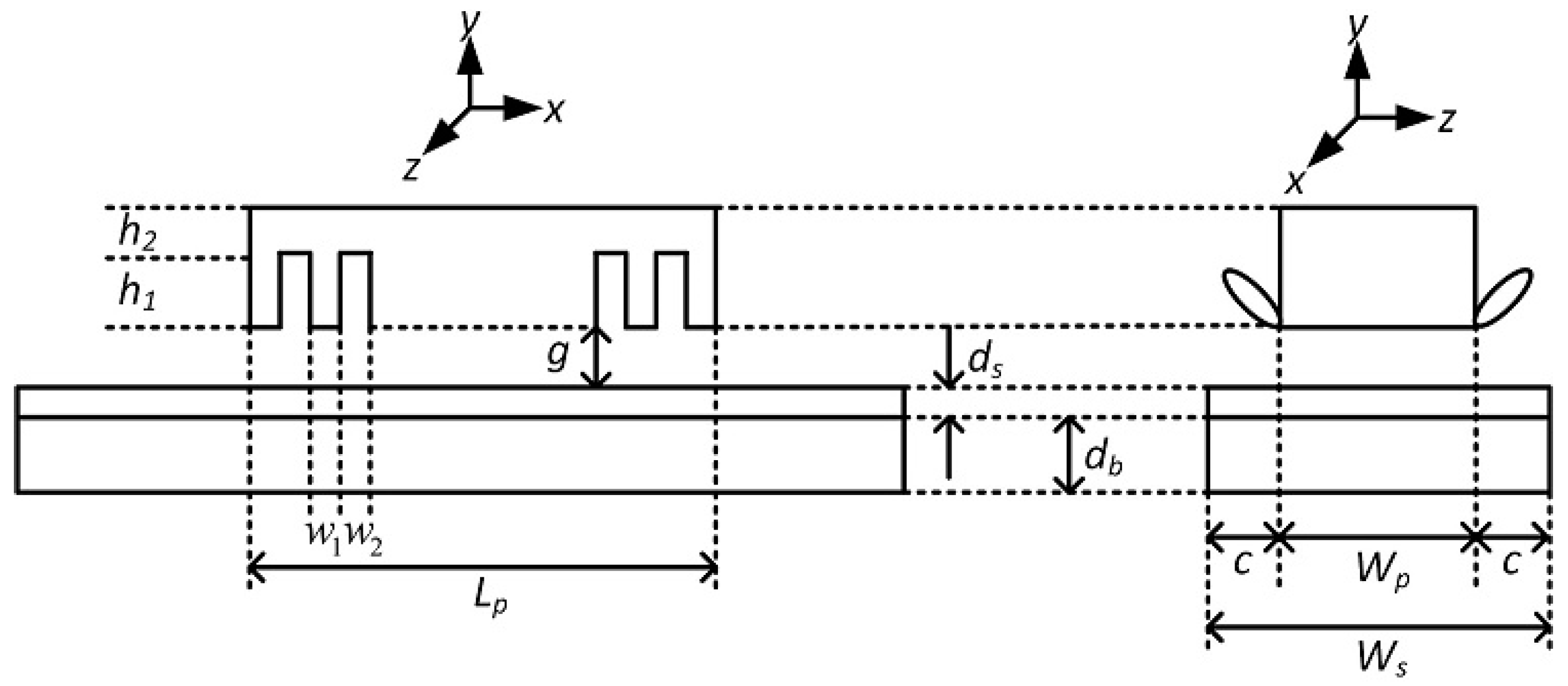
3.5. Parameters Calculation of the Proposed Model
4. Results and Discussion
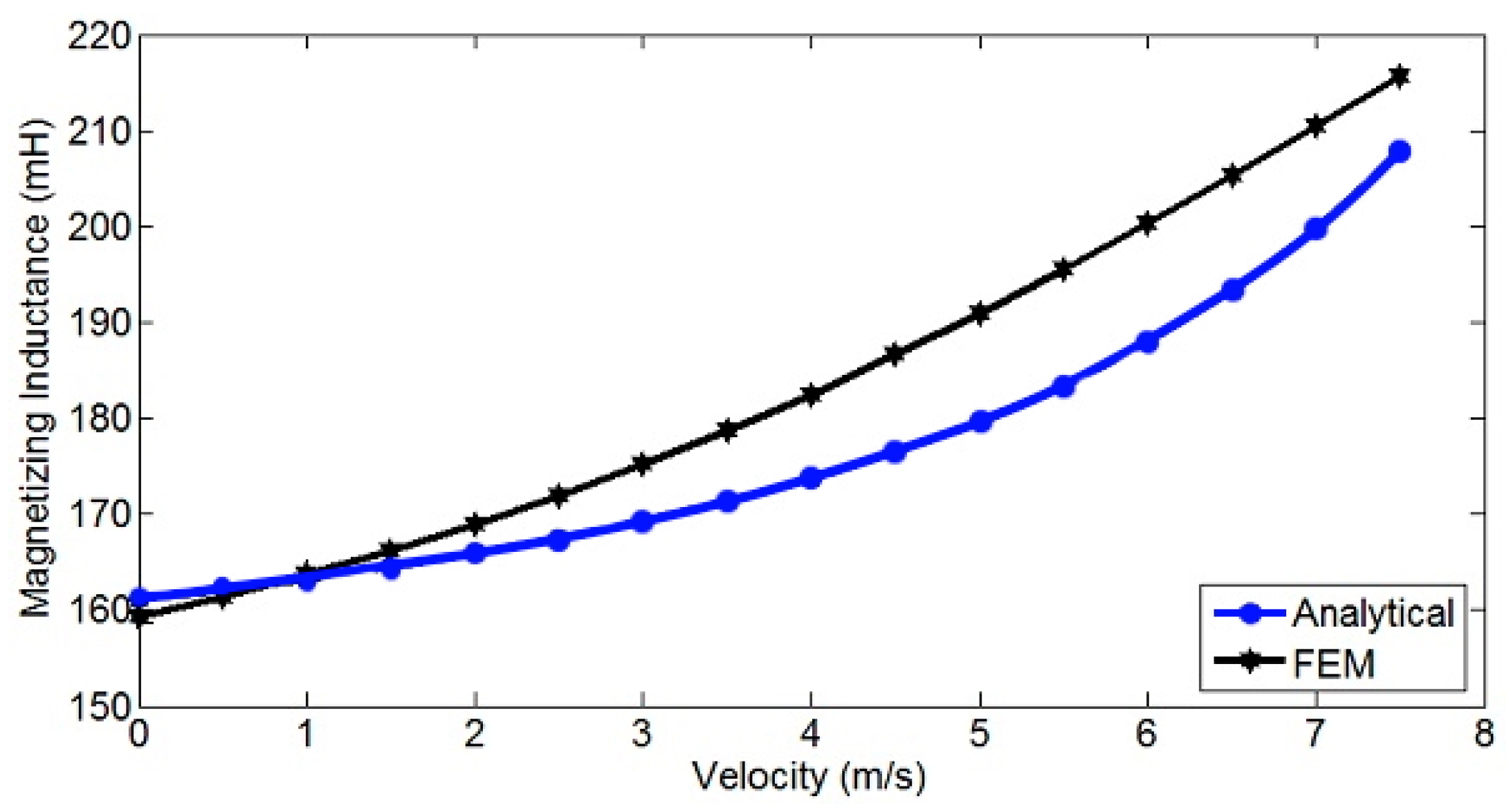
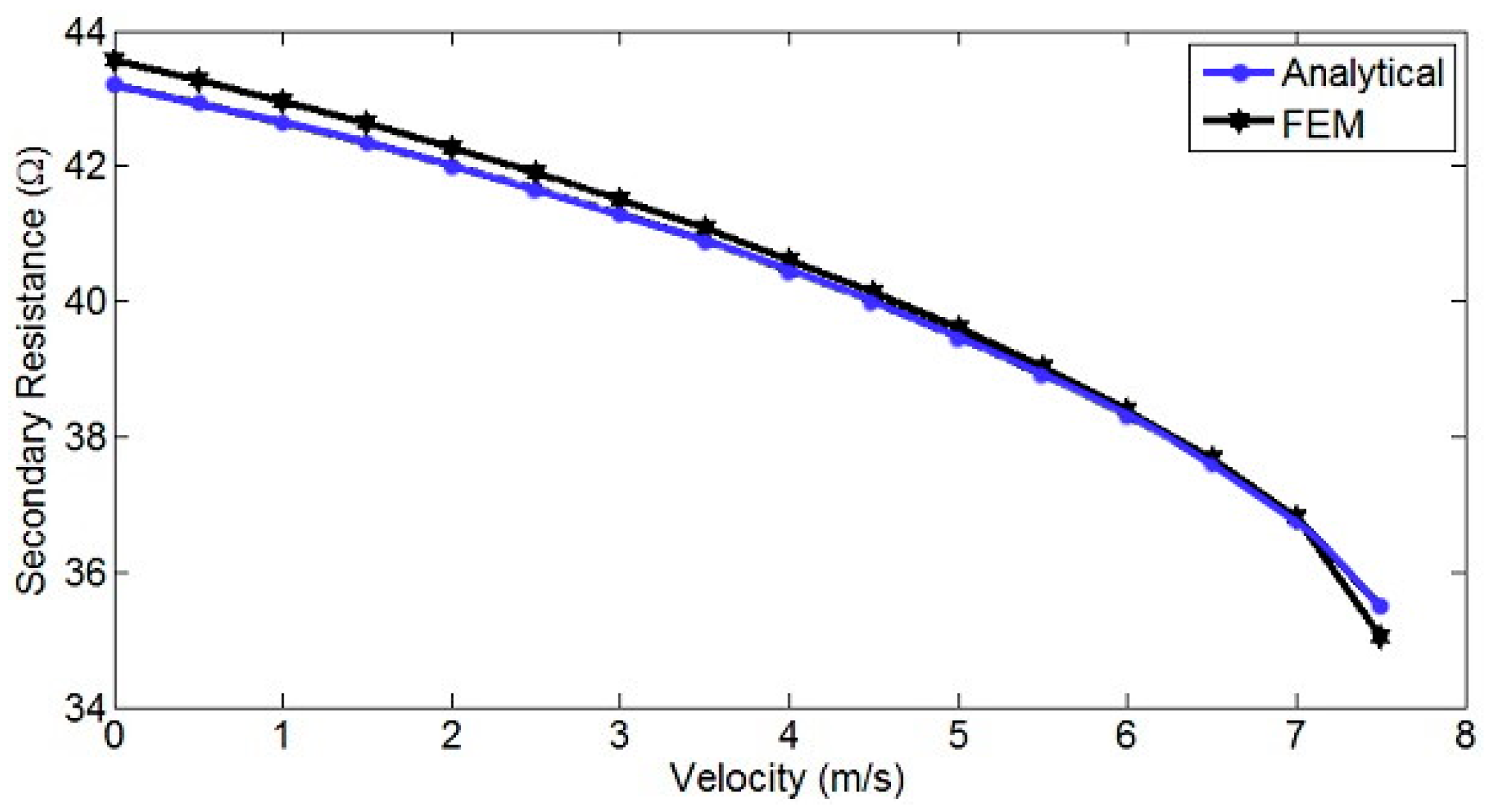
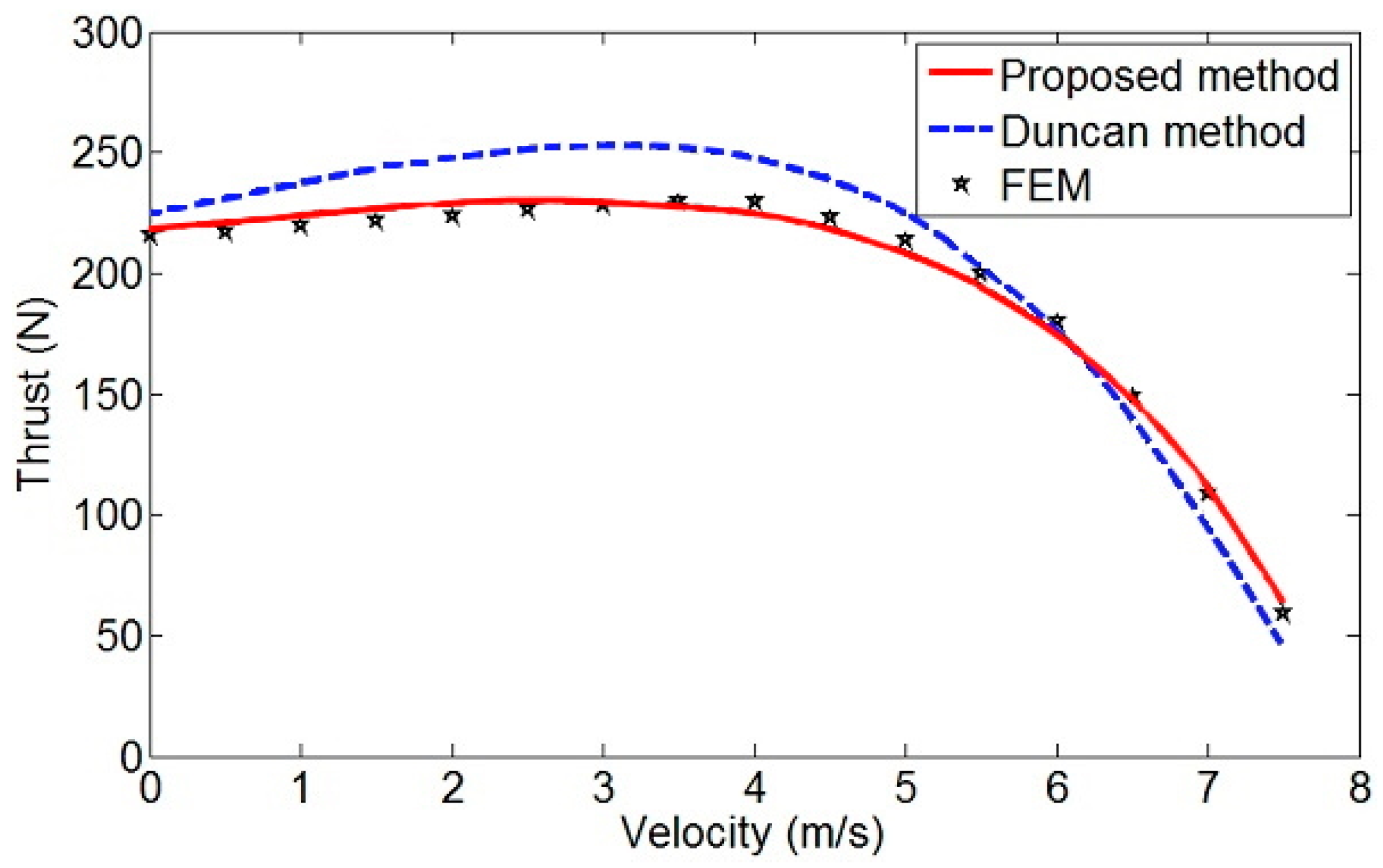
4.1. Verification of Proposed Model Using FEM
4.2. Dynamic Characteristics of LIMs Based on the Proposed Model
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Boldea, I.; Nasar, S. Linear Electric Actuators and Generators; Cambridge University Press: New York, NY, USA, 1997. [Google Scholar]
- Gerra, D.D.; Iakovleva, E.V. Sun Tracking System for Photovoltaic Batteries in Climatic Conditions of the Republic of Cuba. In Proceedings of the International Scientific Electric Power Conference, Saint Petersburg, Russia, 23–24 May 2019. [Google Scholar]
- Gieras, J.F. Linear Induction Drives; Clarendon Press: Oxford, UK, 1994. [Google Scholar]
- Liu, P.; Hung, C.Y.; Chiu, C.S.; Lian, K.Y. Sensorless linear induction motor speed tracking using fuzzy observers. Electr. Power Appl. IET 2011, 5, 325–334. [Google Scholar] [CrossRef]
- Huang, C.I.; Fu, L.C. Adaptive Approach to Motion Controller of Linear Induction Motor with Friction Compensation. IEEE ASME Trans. Mechatron. 2007, 12, 480–490. [Google Scholar] [CrossRef]
- Creppe, R.; De Souza, C.; Simone, G.; Serni, P. Dynamic behaviour of a linear induction motor. In Proceedings of the MELECON ′98. 9th Mediterranean Electrotechnical Conference, Tel-Aviv, Israel, 18–20 May 1998; Volume 2, pp. 1047–1051. [Google Scholar]
- Nondahl, T.; Novotny, D. Three-phase pole-by-pole model of a linear induction machine. IEE Proc. B Electr. Power Appl. 1980, 127, 68–82. [Google Scholar] [CrossRef]
- Lu, C.; Eastham, T.; Dawson, G.E. Transient and dynamic performance of a linear induction motor. In Proceedings of the Conference Record of the 1993 IEEE Industry Applications Conference Twenty-Eighth IAS Annual Meeting, Toronto, ON, Canada, 2–8 October 1993; pp. 266–273. [Google Scholar]
- Xu, W.; Sun, G.; Wen, G.; Wu, Z.; Chu, P. Equivalent Circuit Derivation and Performance Analysis of a Single-Sided Linear Induction Motor Based on the Winding Function Theory. IEEE Trans. Veh. Technol. 2012, 61, 1515–1525. [Google Scholar] [CrossRef]
- Pai, R.; Boldea, I.; Nasar, S. A complete equivalent circuit of a linear induction motor with sheet secondary. IEEE Trans. Magn. 1988, 24, 639–654. [Google Scholar] [CrossRef]
- Gieras, J.; Dawson, G.; Eastham, A. A New Longitudinal End Effect Factor for Linear Induction Motors. IEEE Trans. Energy Convers. 1987, EC-2, 152–159. [Google Scholar] [CrossRef]
- Faiz, J.; Jagari, H. Accurate modeling of single-sided linear induction motor considers end effect and equivalent thickness. IEEE Trans. Magn. 2000, 36, 3785–3790. [Google Scholar] [CrossRef]
- Xu, W.; Zhu, J.G.; Zhang, Y.; Li, Y.; Wang, Y.; Guo, Y. An Improved Equivalent Circuit Model of a Single-Sided Linear Induction Motor. IEEE Trans. Veh. Technol. 2010, 59, 2277–2289. [Google Scholar] [CrossRef]
- Xu, W.; Zhu, J.G.; Zhang, Y.; Li, Z.; Li, Y.; Wang, Y.; Guo, Y.; Li, Y. Equivalent Circuits for Single-Sided Linear Induction Motors. IEEE Trans. Ind. Appl. 2010, 46, 2410–2423. [Google Scholar] [CrossRef]
- Duncan, J. Linear induction motor-equivalent-circuit model. IEE Proc. B Electr. Power Appl. 1983, 130, 51–57. [Google Scholar] [CrossRef]
- Kang, G.; Nam, K. Field-oriented control scheme for linear induction motor with the end effect. IEE Proc. Electr. Power Appl. 2005, 152, 1565–1572. [Google Scholar] [CrossRef]
- Pucci, M. State Space-Vector Model of Linear Induction Motors. IEEE Trans. Ind. Appl. 2014, 50, 195–207. [Google Scholar] [CrossRef]
- Mirsalim, M.; Doroudi, A.; Moghani, J. Obtaining the operating characteristics of linear induction motors: A new approach. IEEE Trans. Magn. 2002, 38, 1365–1370. [Google Scholar] [CrossRef]
- Kim, D.K.; Kwon, B.I. A Novel Equivalent Circuit Model of Linear Induction Motor Based on Finite Element Analysis and Its Coupling with External Circuits. IEEE Trans. Magn. 2006, 42, 3407–3409. [Google Scholar] [CrossRef]
- Amiri, E.; Mendrela, E. A Novel Equivalent Circuit Model of Linear Induction Motors Considering Static and Dynamic End Effects. IEEE Trans. Magn. 2014, 50, 120–128. [Google Scholar] [CrossRef]
- Heidari, H.; Rassõlkin, A.; Kallaste, A.; Vaimann, T.; Andriushchenko, E.; Belahcen, A.; Lukichev, D.V. A review of synchronous reluctance motor-drive advancements. Sustainability 2021, 13, 729. [Google Scholar] [CrossRef]
- Heidari, H.; Rassõlkin, A.; Vaimann, T.; Kallaste, A.; Taheri, A.; Holakooie, M.H.; Belahcen, A. A novel vector control strategy for a six-phase induction motor with low torque ripples and harmonic currents. Energies 2019, 12, 1102. [Google Scholar] [CrossRef]
- Heidari, H.; Andriushchenko, E.; Rassolkin, A.; Kallaste, A.; Vaimann, T.; Demidova, G.L. Comparison of synchronous reluctance machine and permanent magnet-assisted synchronous reluctance machine performance characteristics. In Proceedings of the 2020 27th International Workshop on Electric Drives: MPEI Department of Electric Drives 90th Anniversary (IWED), Moscow, Russia, 27–30 January 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Preston, T.W.; Reece, A.B.J. Transverse edge effects in linear induction motors. Proc. Inst. Electr. Eng. 1969, 116, 973–979. [Google Scholar] [CrossRef]
- Bolton, H. Transverse edge effect in sheet-rotor induction motors. Proc. Inst. Electr. Eng. 1969, 116, 725–731. [Google Scholar] [CrossRef]
- Pucci, M. Direct field oriented control of linear induction motors. Electr. Power Syst. Res. 2012, 89, 11–22. [Google Scholar] [CrossRef]
- Shiri, A.; Shoulaie, A. Design Optimization and Analysis of Single-Sided Linear Induction Motor, Considering All Phenomena. IEEE Trans. Energy Convers. 2012, 27, 516–525. [Google Scholar] [CrossRef]
- Holakooie, M.H.; Ojaghi, M.; Taheri, A. Full-order Luenberger observer based on fuzzy logic control for sensorless field-oriented control of a single-sided linear induction motor. ISA Trans. 2016, 60, 96–108. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Description | Symbol | Unit | Value |
|---|---|---|---|
| Primary frequency | f | Hz | 60 |
| No. of poles | p | – | 6 |
| No. of phases | m | – | 3 |
| No. of slots | z | – | 20 |
| No. of slots per phase per pole | q | – | 1 |
| Pole pitch | τ | mm | 66.67 |
| Mechanical air-gap | g | mm | 3.2 |
| Primary length | Lp | mm | 400 |
| Primary width | Wp | mm | 177.8 |
| Secondary sheet thickness | ds | mm | 3.2 |
| Back iron thickness | db | mm | 6.4 |
| Secondary width | Ws | mm | 247.8 |
| Slot depth | h1 | mm | 52.5 |
| Yoke height | h2 | mm | 26.3 |
| Opening slot | bs0 | mm | 12.7 |
| Slot pitch | τs | mm | 19 |
| Secondary sheet conductivity | σs | Ms/m | 24.59 |
| Back iron sheet conductivity | σb | Ms/m | 5.8 |
| Parameter | Field Analysis Method | Finite Element Method |
|---|---|---|
| Lls | 61.2 mH | 63.9 mH |
| Rs | 10.62 Ω | 10.3 Ω |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heidari, H.; Rassõlkin, A.; Razzaghi, A.; Vaimann, T.; Kallaste, A.; Andriushchenko, E.; Belahcen, A.; Lukichev, D.V. A Modified Dynamic Model of Single-Sided Linear Induction Motors Considering Longitudinal and Transversal Effects. Electronics 2021, 10, 933. https://doi.org/10.3390/electronics10080933
Heidari H, Rassõlkin A, Razzaghi A, Vaimann T, Kallaste A, Andriushchenko E, Belahcen A, Lukichev DV. A Modified Dynamic Model of Single-Sided Linear Induction Motors Considering Longitudinal and Transversal Effects. Electronics. 2021; 10(8):933. https://doi.org/10.3390/electronics10080933
Chicago/Turabian StyleHeidari, Hamidreza, Anton Rassõlkin, Arash Razzaghi, Toomas Vaimann, Ants Kallaste, Ekaterina Andriushchenko, Anouar Belahcen, and Dmitry V. Lukichev. 2021. "A Modified Dynamic Model of Single-Sided Linear Induction Motors Considering Longitudinal and Transversal Effects" Electronics 10, no. 8: 933. https://doi.org/10.3390/electronics10080933
APA StyleHeidari, H., Rassõlkin, A., Razzaghi, A., Vaimann, T., Kallaste, A., Andriushchenko, E., Belahcen, A., & Lukichev, D. V. (2021). A Modified Dynamic Model of Single-Sided Linear Induction Motors Considering Longitudinal and Transversal Effects. Electronics, 10(8), 933. https://doi.org/10.3390/electronics10080933