
Performance Evaluation of LoRa 920 MHz Frequency Band in a Hilly Forested Area


 ,
,
Abstract
1. Introduction
2. Materials and Methods
2.1. Principle of LoRa Technology
2.2. Theoretical Data
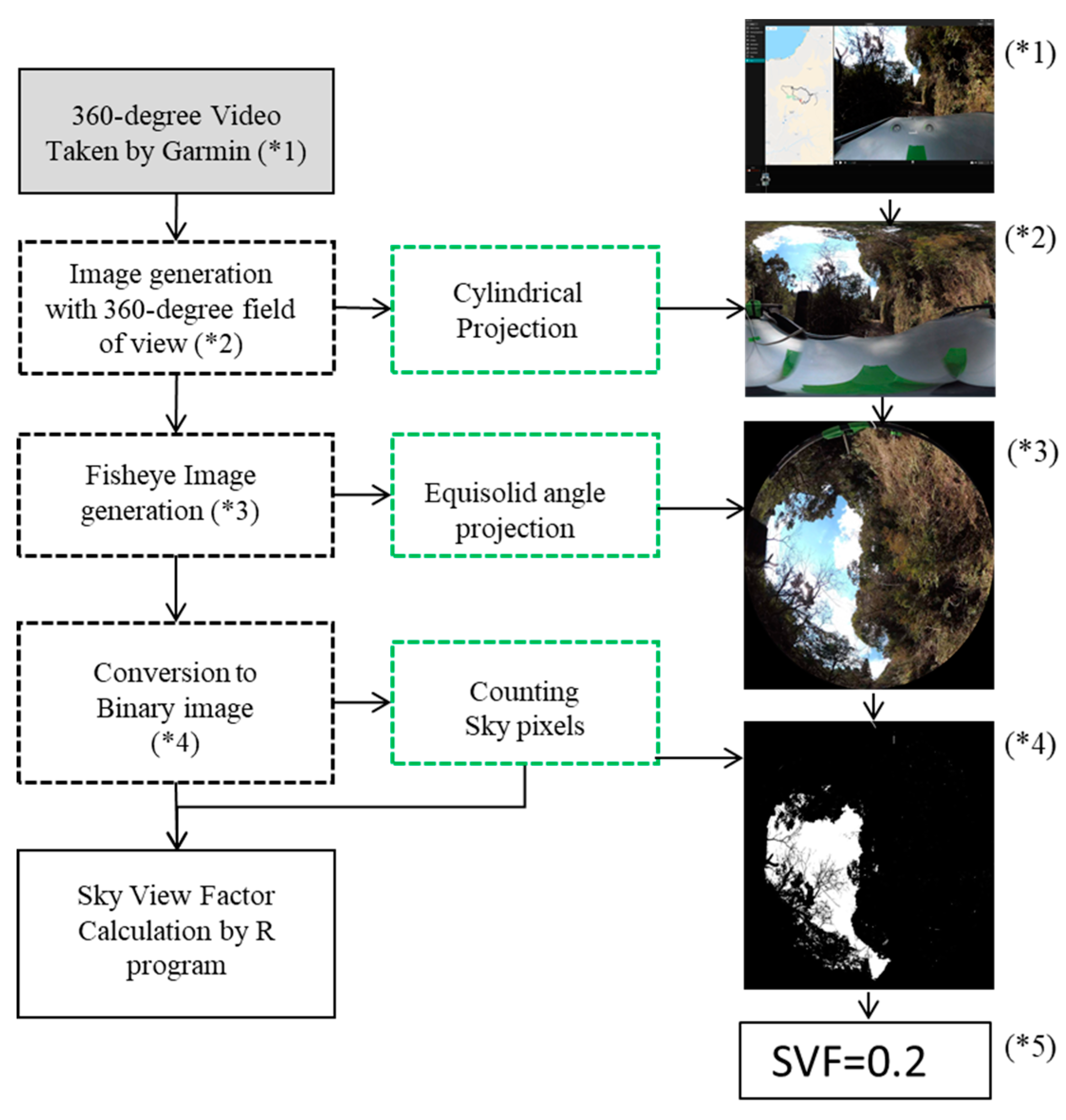
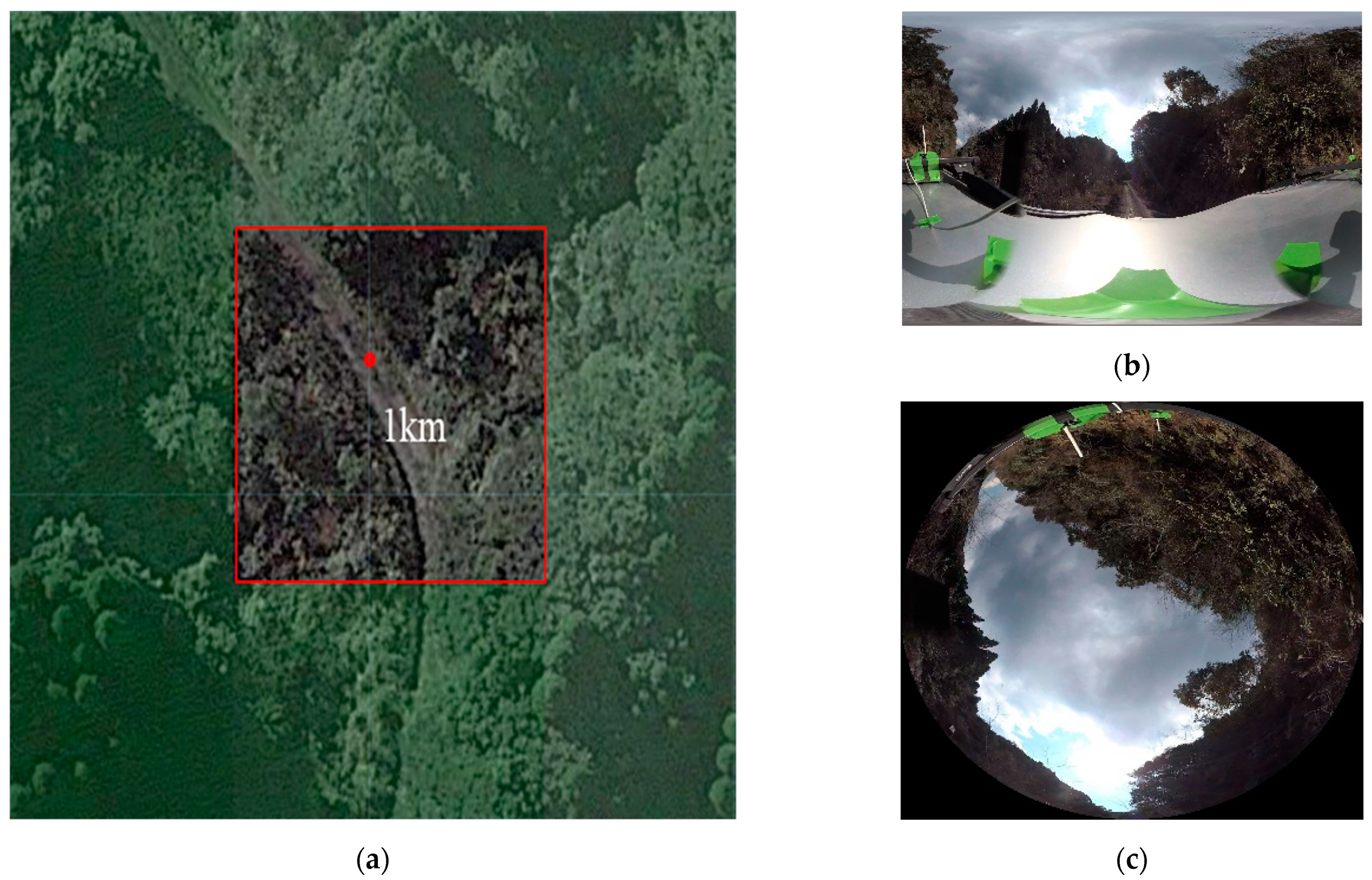
2.3. Sky View Factor Calculation (SVF)
2.4. Global Forest Canopy Height Map
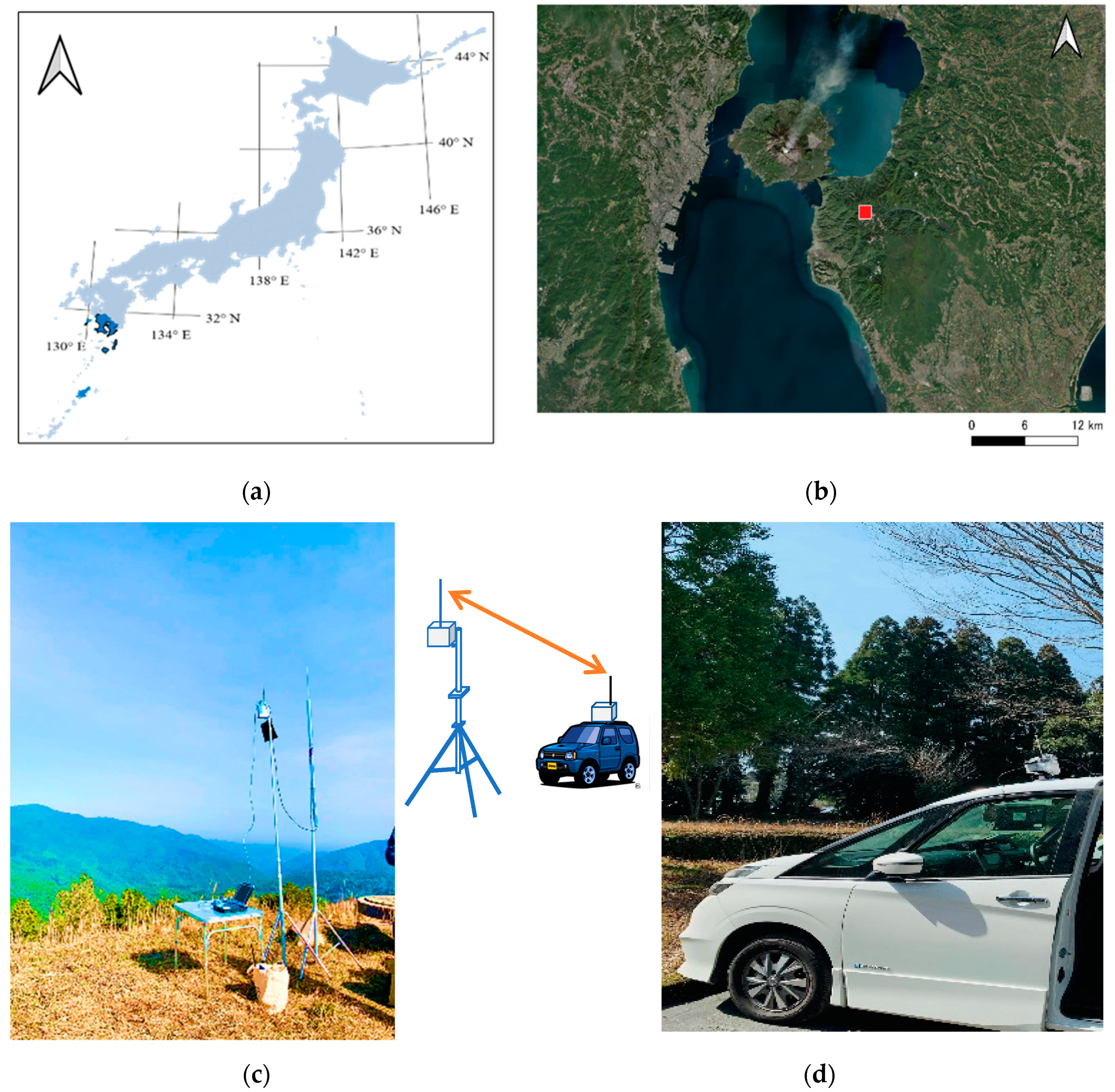
2.5. Experimental Setup
3. Results
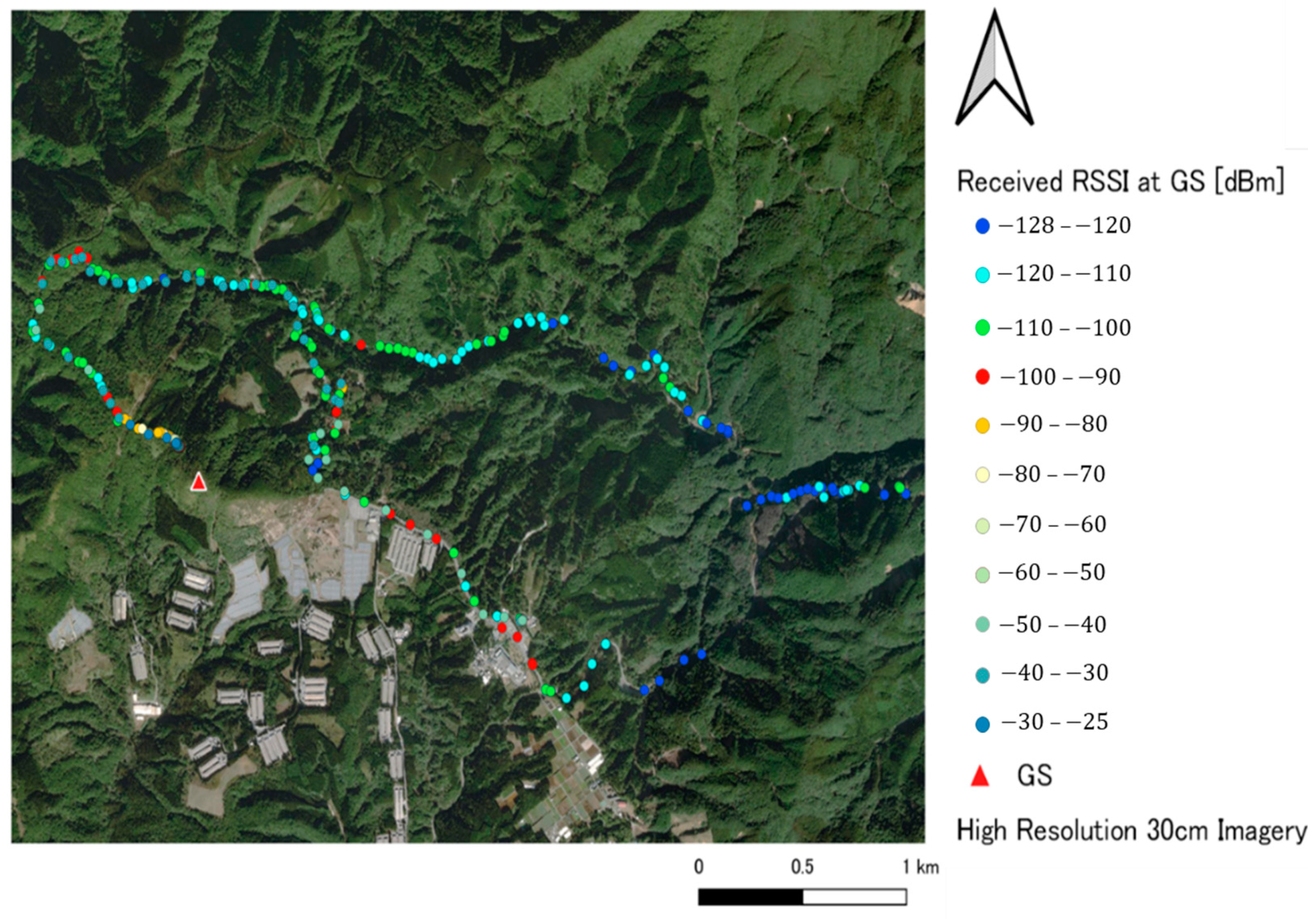
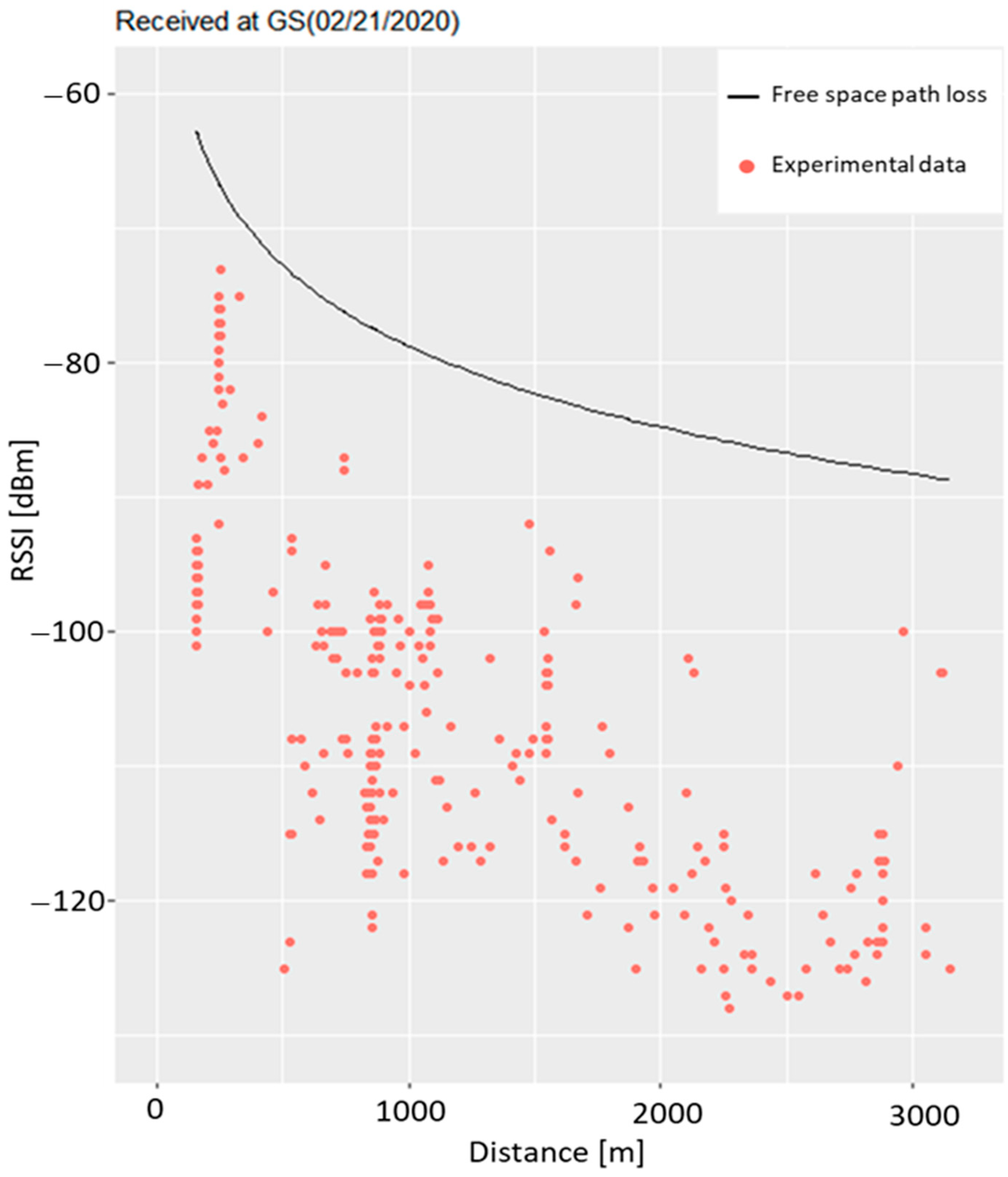
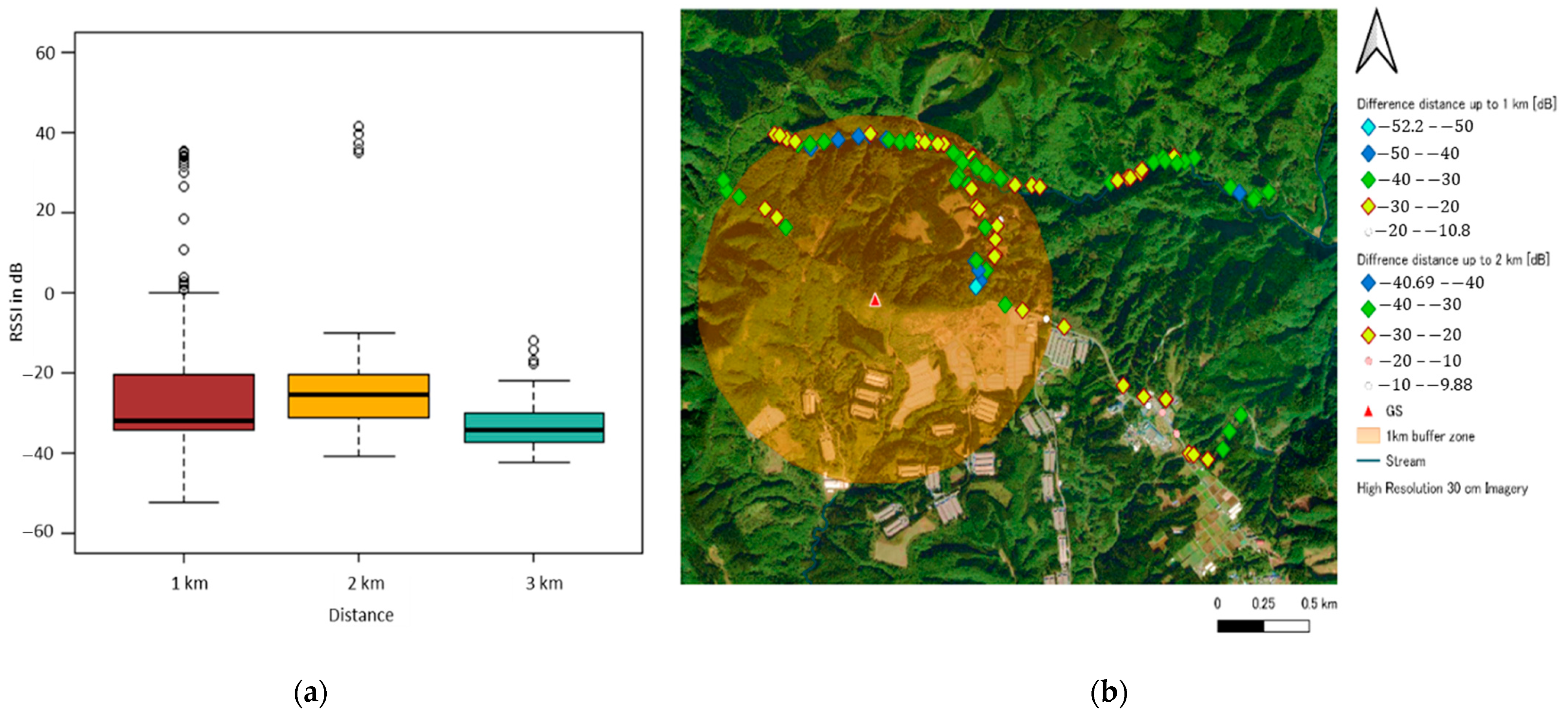
3.1. Propagation Measurement of 920 MHz Band
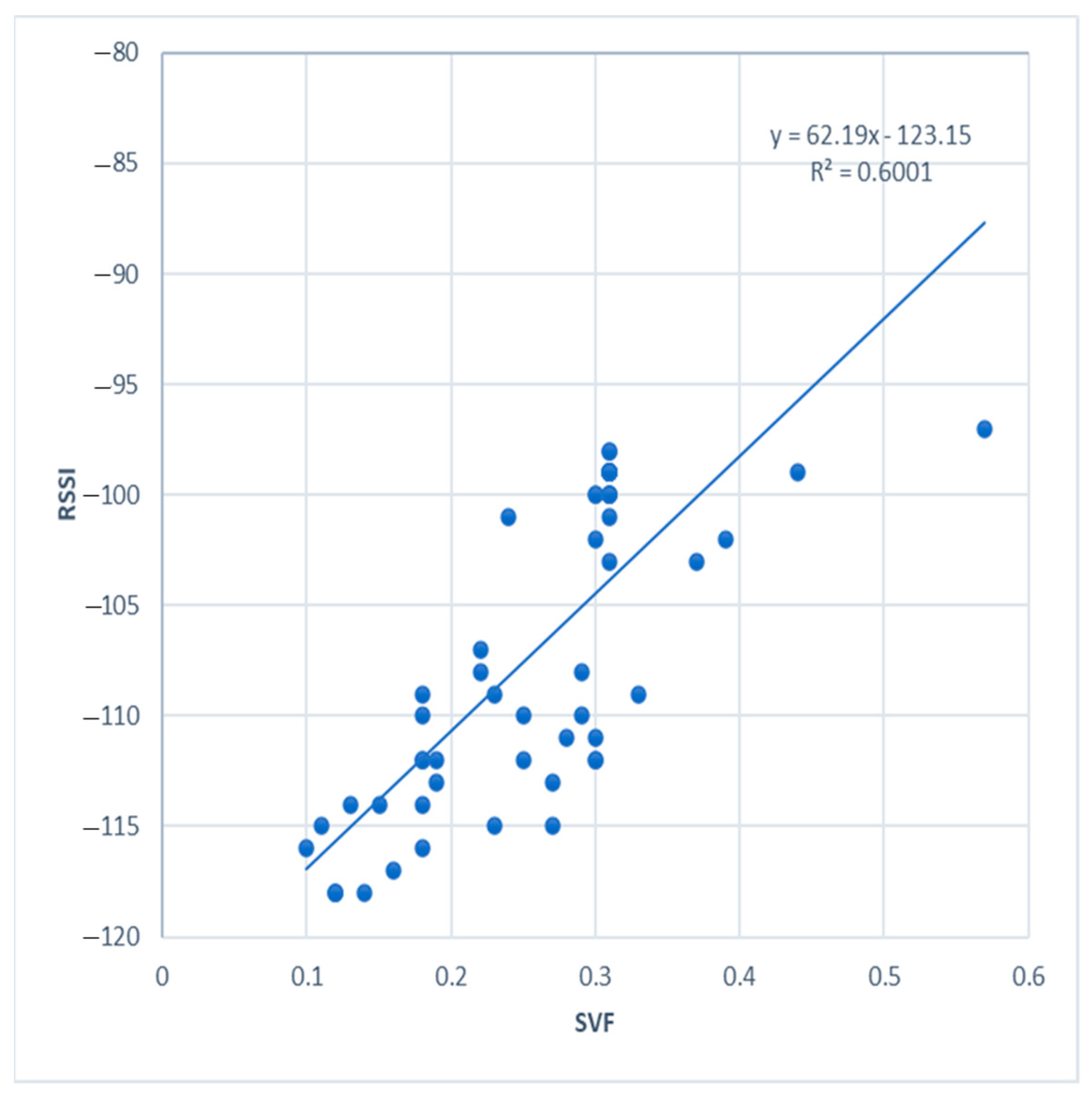
3.2. Correlation Analysis between Sky View Factor Calculation (SVF) and RSSI
- A higher signal attenuation was observed compared to the theoretical value.
- A large number of data was received.
- The transmitter car was moving through mountainside.
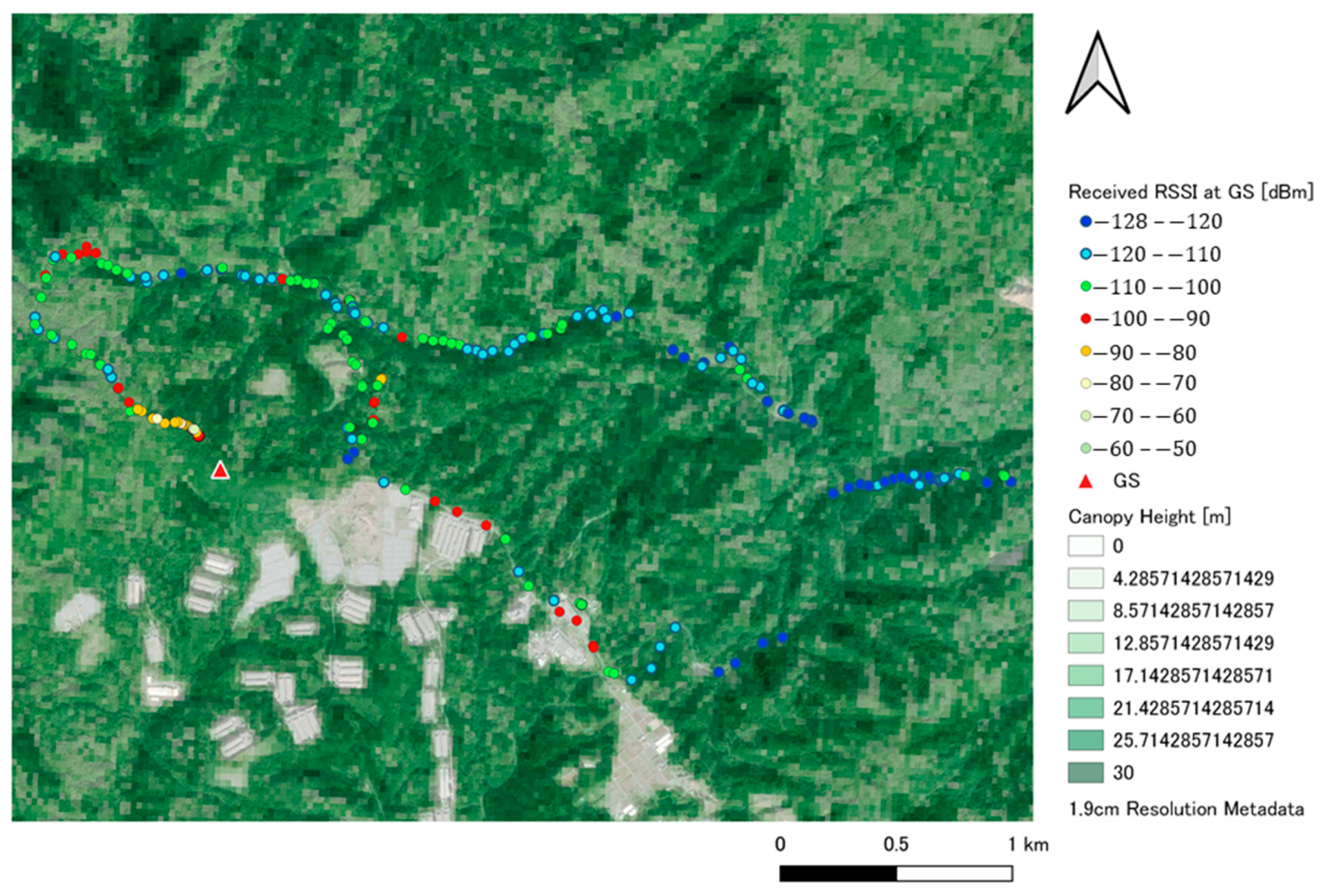
3.3. Forest Canopy Height Map
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gilad, D.M. The IoT Rundown for 2020: Stats, Risks and Solutions. 2020. Available online: https://securitytoday.com/Articles/2020/01/13/The-IoT-Rundown-for-2020.aspx?Page=2 (accessed on 11 September 2020).
- Frost and Sullivan. White Paper: Growing Convergence of LPWAN and IoT Technologies. 2017. Available online: https://rfdesignuk.com/uploads/9/4/6/0/94609530/murata_lpwan_study.pdf (accessed on 15 September 2020).
- The Ministry of Internal Affairs and Communication: Frequency Reorganization Action Plan. Available online: https://www.soumu.go.jp/ (accessed on 20 September 2020).
- Meng, Y.S.; Lee, Y.H.; Ng, B.C. Study of Propagation Loss Prediction in Forest Environment. PIER B 2009, 17, 117–133. [Google Scholar] [CrossRef]
- Weissberger, M.A. An initial critical summary of models for predicting the attenuation of radio waves by foliage. In ECAC-TR-81-101; Electromagnetic Compatibility Analysis Center: Annapolis, MD, USA, 1981. [Google Scholar]
- CCIR. Influences of Terrain Irregularities and Vegetation on Troposphere Propagation; CCIR Report; CCIR: Geneva, Switzerland, 1986; pp. 235–236. [Google Scholar]
- COST235: Radio Propagation Effect on Next-Generation Fixed Service Terrestrial Telecommunication Systems; European cooperation in the field of scientific and technical research (COST) final report; Commission of the European Unio: Luxembourg, 1996; ISBN 92-827-8023.3.
- Lova, O.; Murphy, A.L.; Ghiro, L.; Molteni, D.; Ossi, F.; Cagnacci, F. LoRa from the City to the Mountains: Exploration of Hardware and Environmental Factors. In Proceedings of the 2nd International Workshop on New Wireless Communication Paradigms for the Internet of Things (MadCom), Uppsala, Sweden, 20–22 February 2017. [Google Scholar]
- Khairol, A.A.; Mohd, S.S.; Jivitraa, D.S.; Fakroul, R.H. Impact of Foliage on LoRa 433 MHz Propagation in Tropical Environment. AIP Conf. Proc. 2018. [Google Scholar] [CrossRef]
- Pablo, A.V.; Fabian, A.S.; Andres, V.R.; Alcides, A. Evaluation of LoRaWAN Transmission Range for Wireless Sensor Networks in Riparian Forests. In Proceedings of the 22nd International ACM Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Miami Beach, FL, USA, 25–29 November 2019. [Google Scholar] [CrossRef]
- Mariana, R.V.; Joao, V.H.L.; Douglas, F.M.; Renata, I.S.P.; Cleonilson, P.S.; Orlando, B. An Evaluation of LoRa Communication Range in Urban and Forest Areas: A Case Study in Brazil and Portugal. In Proceedings of the 10th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 17–19 October 2019. [Google Scholar] [CrossRef]
- Ferreira, A.E.; Ortiz, F.M.; Costa, L.H.; Foubert, B.; Amadou, I.; Mitton, N. A study of the LoRa signal propagation in forest, urban, and suburban environments. Ann. Telecommun. 2020. [Google Scholar] [CrossRef]
- Malevich, E.S.; Mikhailav, M.S.; Volkova, A.A.; Kozheinkov, K.Y. Experimental Research of X-Band Radio Wave Propagation in Forest Vegetation. In Proceedings of the 2019 International Youth Conference on Radio Electronics, Electrical and Power Engineering (REEPE), Moscow, Russia, 14–15 March 2019; pp. 1–4. [Google Scholar]
- LoRa Documentation. Available online: https://lora.readthedocs.io/en/latest (accessed on 25 September 2020).
- Semtech. Available online: https://www.semtech.com/lora (accessed on 25 September 2020).
- Juha, P.; Konstantin, M.; Antti, R.; Tuomo, H. On the Coverage of LPWANs: Range Evaluation and Channel Attenuation Model for LoRa Technology. In Proceedings of the 14th International Conference on ITS Telecommunications (ITST), Copenhagen, Denmark, 2–4 December 2015. [Google Scholar] [CrossRef]
- Philips, C.; Sicker, D.; Grunwald, D. A survey of wireless path loss prediction and coverage mapping methods. IEEE Commun. Surv. Tutor. 2013, 15, 255–270. [Google Scholar] [CrossRef]
- Klemen, Z.; Kristof, O.; Ziga, K. Sky-View Factor as a Relief Visualization Technique. Remote Sens 2011, 3, 398–415. [Google Scholar] [CrossRef]
- Chunping, M.; Shuai, Y.; Yuanman, H.; Huiwen, Z. Review of methods used to estimate the sky view factor in urban street canyons. Build. Environ. 2020, 168, 106497. [Google Scholar] [CrossRef]
- Tsuyoshi, H.; Tsu-Ping, L.; Yuhwan, S. Sky view factor measurement by using a spherical camera. J. Agric. Meteorol. 2018, 75, 59–66. [Google Scholar] [CrossRef]
- NASA GEDI. Available online: https://glad.umd.edu/dataset/gedi (accessed on 26 September 2020).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value |
|---|---|
| Receiver (Rx) height | 2.5 m |
| Transmitter (Tx) power | +20 mW |
| Antenna Gain (dB) | 0 |
| Spreading Factor (sf) | 12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Myagmardulam, B.; Miura, R.; Ono, F.; Kagawa, T.; Shan, L.; Nakayama, T.; Kojima, F.; Choijil, B. Performance Evaluation of LoRa 920 MHz Frequency Band in a Hilly Forested Area. Electronics 2021, 10, 502. https://doi.org/10.3390/electronics10040502
Myagmardulam B, Miura R, Ono F, Kagawa T, Shan L, Nakayama T, Kojima F, Choijil B. Performance Evaluation of LoRa 920 MHz Frequency Band in a Hilly Forested Area. Electronics. 2021; 10(4):502. https://doi.org/10.3390/electronics10040502
Chicago/Turabian StyleMyagmardulam, Bilguunmaa, Ryu Miura, Fumie Ono, Toshinori Kagawa, Lin Shan, Tadachika Nakayama, Fumihide Kojima, and Baasandash Choijil. 2021. "Performance Evaluation of LoRa 920 MHz Frequency Band in a Hilly Forested Area" Electronics 10, no. 4: 502. https://doi.org/10.3390/electronics10040502
APA StyleMyagmardulam, B., Miura, R., Ono, F., Kagawa, T., Shan, L., Nakayama, T., Kojima, F., & Choijil, B. (2021). Performance Evaluation of LoRa 920 MHz Frequency Band in a Hilly Forested Area. Electronics, 10(4), 502. https://doi.org/10.3390/electronics10040502