
A Simplified Output Feedback Controller for the DC-DC Boost Power Converter


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Derivation and Analysis of the Output Feedback Controller
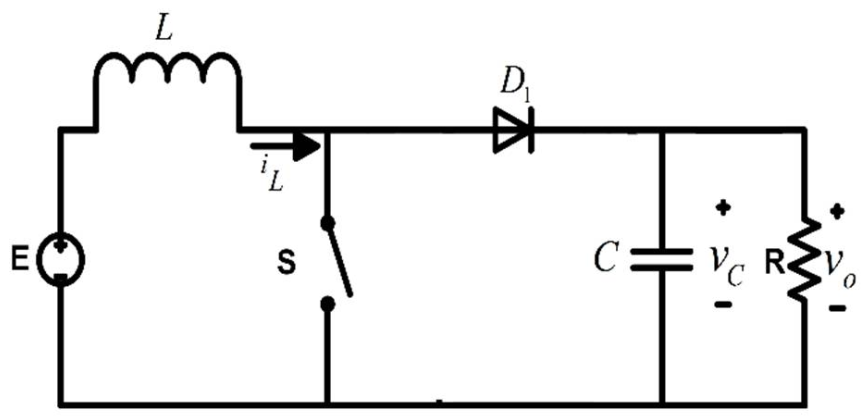
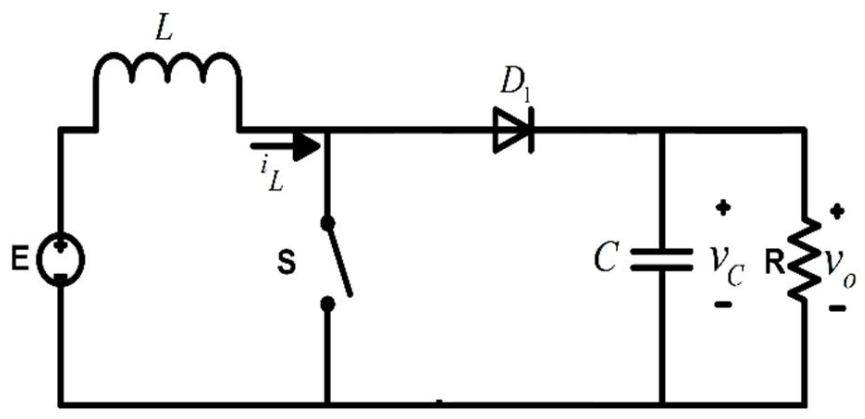
2.1. Averaged State-Space Model of the Boost Converter
2.2. Derivation of the Proposed Output Feedback Controller
2.3. Tuning Guidelines
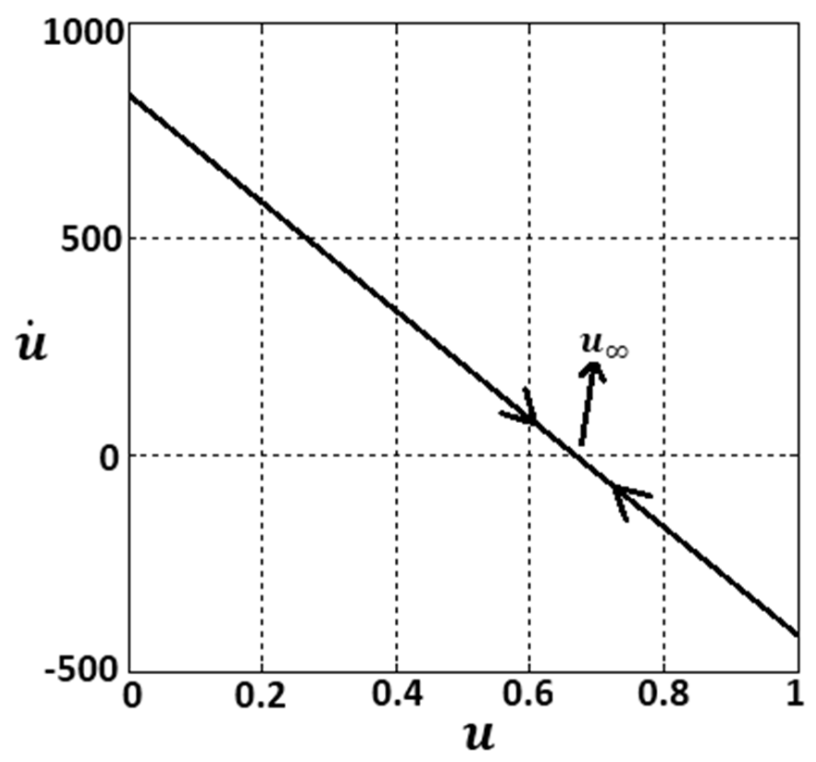
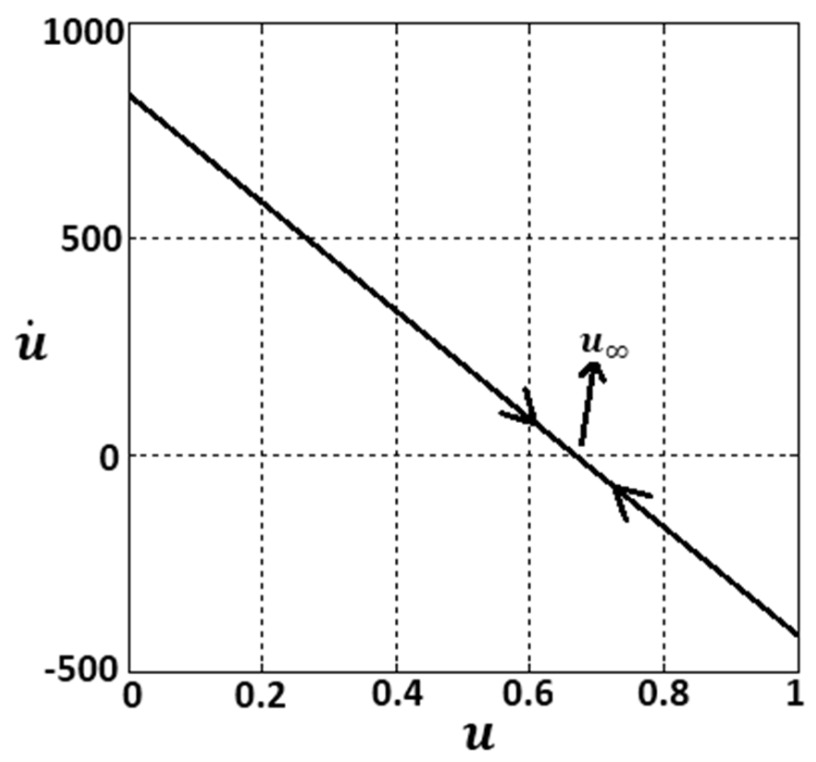
2.4. Feasibility of the Proposed Controller
3. Simulation and Experimental Results
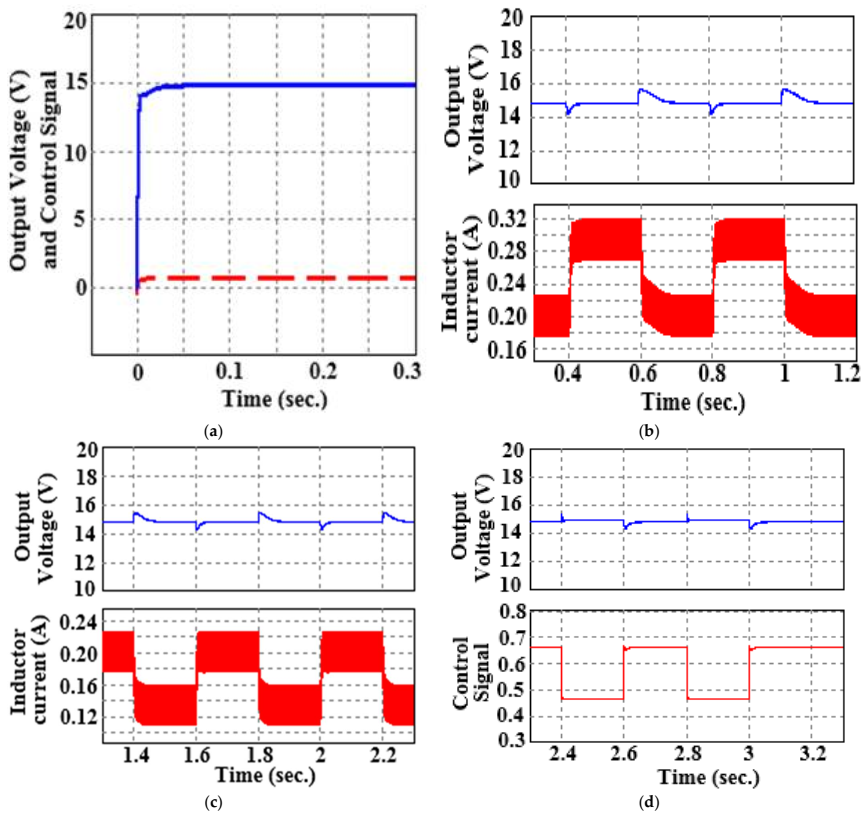
3.1. Simulation Results
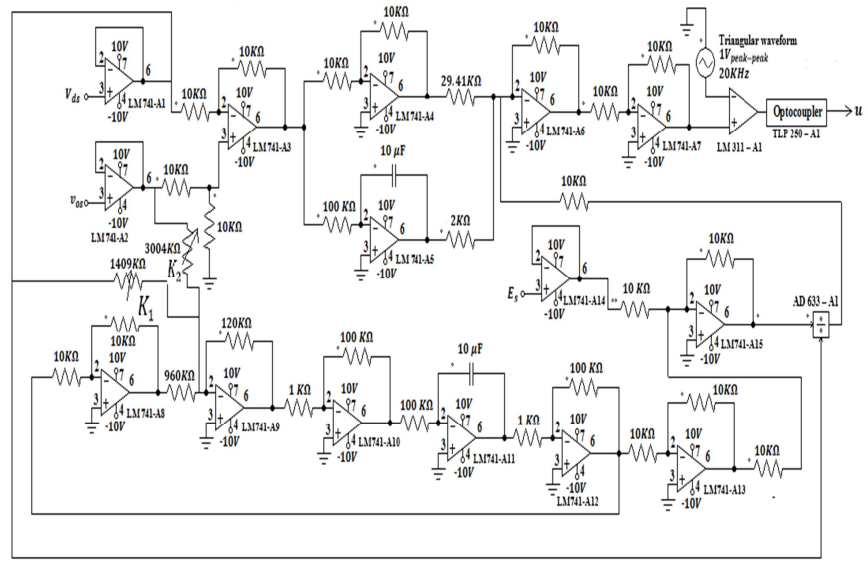
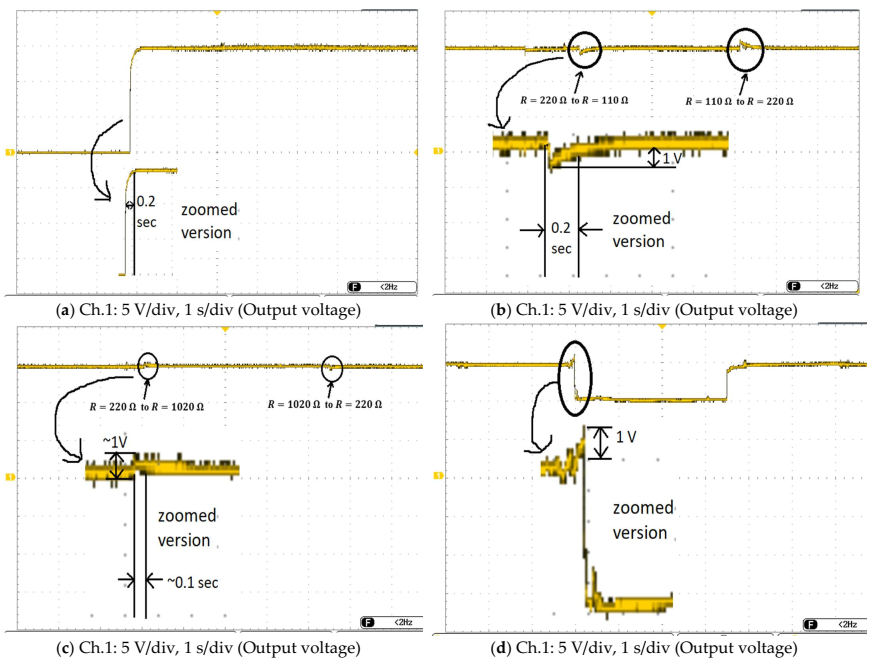
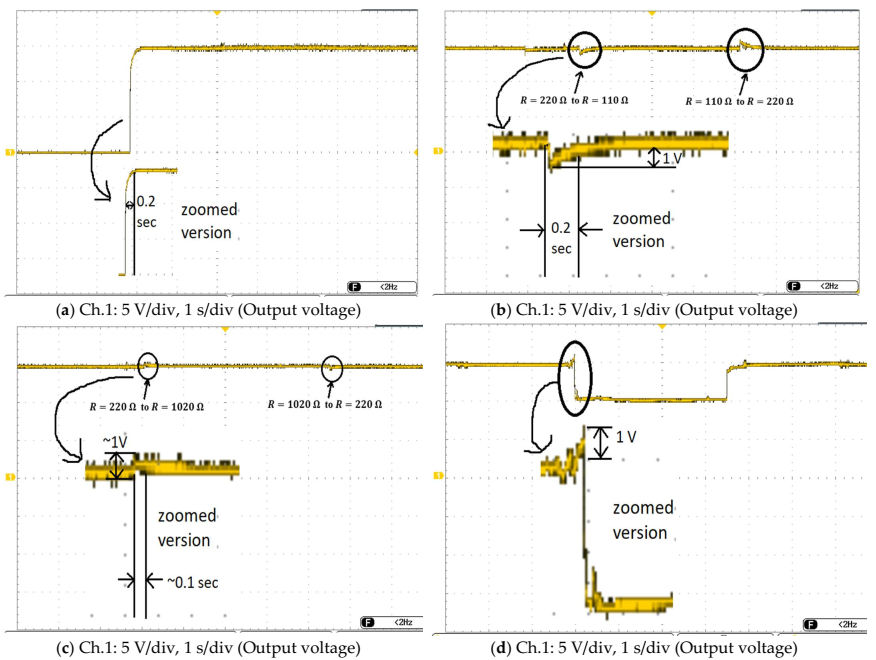
3.2. Experimental Results
3.3. Discussion on Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- He, X.; Li, W. Review of nonisolated high-step-up dc/dc converters in photovoltaic grid-connected applications. IEEE Trans. Power Electron. 2011, 58, 1239–1250. [Google Scholar]
- Wu, G.; Ruan, X.; Ye, Z. Review of nonisolated high-step-up dc/dc converters in photovoltaic grid-connected applications. IEEE Trans. Ind. Electron. 2015, 62, 383–393. [Google Scholar] [CrossRef]
- Ahrabi, R.R.; Ardi, H.; Elmi, M. A novel step-up multiinput dc–dc converter for hybrid electric vehicles application. IEEE Trans. Power Electron. 2017, 32, 3549–3561. [Google Scholar] [CrossRef]
- Sira-Ramirez, H.; Perez, R.; Ortega, R.; Garcia, M. Passivity-based controllers for the stabilization of DC-to- DC power Converters. Automatica 1997, 33, 499–513. [Google Scholar] [CrossRef]
- Alvarez-Ramirez, J.; Perez, G.E. Stability of current-mode control for dc–dc power converters. Syst. Contr. Lett. 2002, 45, 113–119. [Google Scholar] [CrossRef]
- Cervantes, I.; Garcia, D.; Noriega, D. Linear multiloop control of quasi-resonant converters. IEEE Trans. Power Electron. 2004, 18, 1194–1201. [Google Scholar] [CrossRef]
- Chan, C.Y. A nonlinear control for dc-dc power converters. IEEE Trans. Power Electron. 2007, 22, 216–222. [Google Scholar] [CrossRef]
- Chincholkar, S.H.; Chan, C.Y. Investigation of current-mode controlled cascade boost converter systems: Dynamics and stability issues. IET Power Electron. 2016, 9, 911–920. [Google Scholar] [CrossRef]
- Chan, C.Y.; Chincholkar, S.H.; Jiang, W. Adaptive current-mode control of a high step up dc-dc converter. IEEE Trans. Power Electron. 2017, 32, 7297–7305. [Google Scholar] [CrossRef]
- Chan, C.Y.; Chincholkar, S.H.; Jiang, W. A modified fixed current-mode controller for improved performance in quadratic boost converters. IEEE Trans. Circuits Syst. 2020, 67, 2014–2018. [Google Scholar] [CrossRef]
- Jiang, W.; Chincholkar, S.H.; Chan, C.Y. A Comparative Study of Adaptive Current-Mode Controllers for a Hybrid-type high-order Boost Converter. IET Power Electron. 2018, 11, 524–530. [Google Scholar] [CrossRef]
- Tan, S.C.; Lai, Y.M.; Tse, C.K. General design issues of sliding- mode controllers in dc-dc converters. IEEE Trans. Ind. Electron. 2008, 55, 1160–1174. [Google Scholar]
- López-Santos, O.; Martínez-Salamero, L.; García, G.; Valderrama-Blavi, H.; Mercuri, D.O. Efficiency analysis of a sliding-mode controlled quadratic boost converter. IET Power Electron. 2013, 6, 364–373. [Google Scholar] [CrossRef]
- López-Santos, O.; Martínez-Salamero, L.; García, G.; Valderrama-Blavi, H.; Sierra-Polanco, T. Robust sliding-mode control design for a voltage regulated quadratic boost converter. IEEE Trans. Power Electron. 2015, 30, 2313–2327. [Google Scholar] [CrossRef]
- Chincholkar, S.H.; Jiang, W.; Chan, C.Y. A modified Hysteresis-modulation-based Sliding Mode Control for Improved Performance in Hybrid Dc-Dc Boost Converter. IEEE Trans. Circuits Syst. 2018, 65, 1683–1687. [Google Scholar] [CrossRef]
- Chincholkar, S.H.; Jiang, W.; Chan, C.Y. A Normalized Output Error-based Sliding-Mode Controller for the Cascade boost converter. IEEE Trans. Circuits Syst. 2020, 67, 92–96. [Google Scholar] [CrossRef]
- Tan, S.C.; Lai, Y.M.; Nagy, I.; Tse, C.K. A unified approach to the design of PWM-based sliding-mode voltage controllers for basic DC-DC converters in continuous conduction mode. IEEE Trans. Circuits Syst. I Reg. Papers 2006, 53, 1816–1827. [Google Scholar]
- Tan, S.C.; Lai, Y.M.; Tse, C.K.; Wu, C.K. A pulsewidth modulation based integral sliding mode current controller for boost converters. In Proceedings of the 37th IEEE Power Electronics Specialists Conference, Jeju, Korea, 18–22 June 2006. [Google Scholar]
- Tan, S.C.; Lai, Y.M.; Tse, C.K. Indirect sliding mode control of power converters via double integral sliding surface. IEEE Trans. Power Electron. 2008, 23, 600–611. [Google Scholar]
- Chincholkar, S.H.; Chan, C.Y. Design of fixed-frequency pulse-width-modulation based sliding-mode controllers for the quadratic boost converter. IEEE Trans. Circuits Syst. 2017, 64, 51–55. [Google Scholar]
- Chincholkar, S.H.; Jiang, W.; Chan, C.Y. An Improved PWM-based Sliding-Mode Controller for a Dc-Dc Cascade Boost Converter. IEEE Trans. Circuits Syst. 2018, 65, 1639–1643. [Google Scholar] [CrossRef]
- Chan, C.Y. Simplified parallel-damped passivity-based controllers for dc-dc Converters. Automatica 2008, 44, 2977–2980. [Google Scholar] [CrossRef]
- Son, Y.I.; Kim, I.H. Complementary PID controller to passivity- based nonlinear control of boost converters with inductor resistance. IEEE Trans. Control Syst. Technol. 2012, 20, 826–834. [Google Scholar] [CrossRef]
- Nise, N. Control Systems Engineering; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2009. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chincholkar, S.; Jiang, W.; Chan, C.-Y.; S. Rangarajan, S. A Simplified Output Feedback Controller for the DC-DC Boost Power Converter. Electronics 2021, 10, 493. https://doi.org/10.3390/electronics10040493
Chincholkar S, Jiang W, Chan C-Y, S. Rangarajan S. A Simplified Output Feedback Controller for the DC-DC Boost Power Converter. Electronics. 2021; 10(4):493. https://doi.org/10.3390/electronics10040493
Chicago/Turabian StyleChincholkar, Satyajit, Wentao Jiang, Chok-You Chan, and Shriram S. Rangarajan. 2021. "A Simplified Output Feedback Controller for the DC-DC Boost Power Converter" Electronics 10, no. 4: 493. https://doi.org/10.3390/electronics10040493
APA StyleChincholkar, S., Jiang, W., Chan, C.-Y., & S. Rangarajan, S. (2021). A Simplified Output Feedback Controller for the DC-DC Boost Power Converter. Electronics, 10(4), 493. https://doi.org/10.3390/electronics10040493