
Unmanned Aerial Vehicles for Crowd Monitoring and Analysis

 , , ,
, , ,  ,
,  and
and 
Abstract
1. Introduction
2. Drone Architecture
2.1. Drone Build
2.2. Visual and Onboard Sensors
2.3. Communication
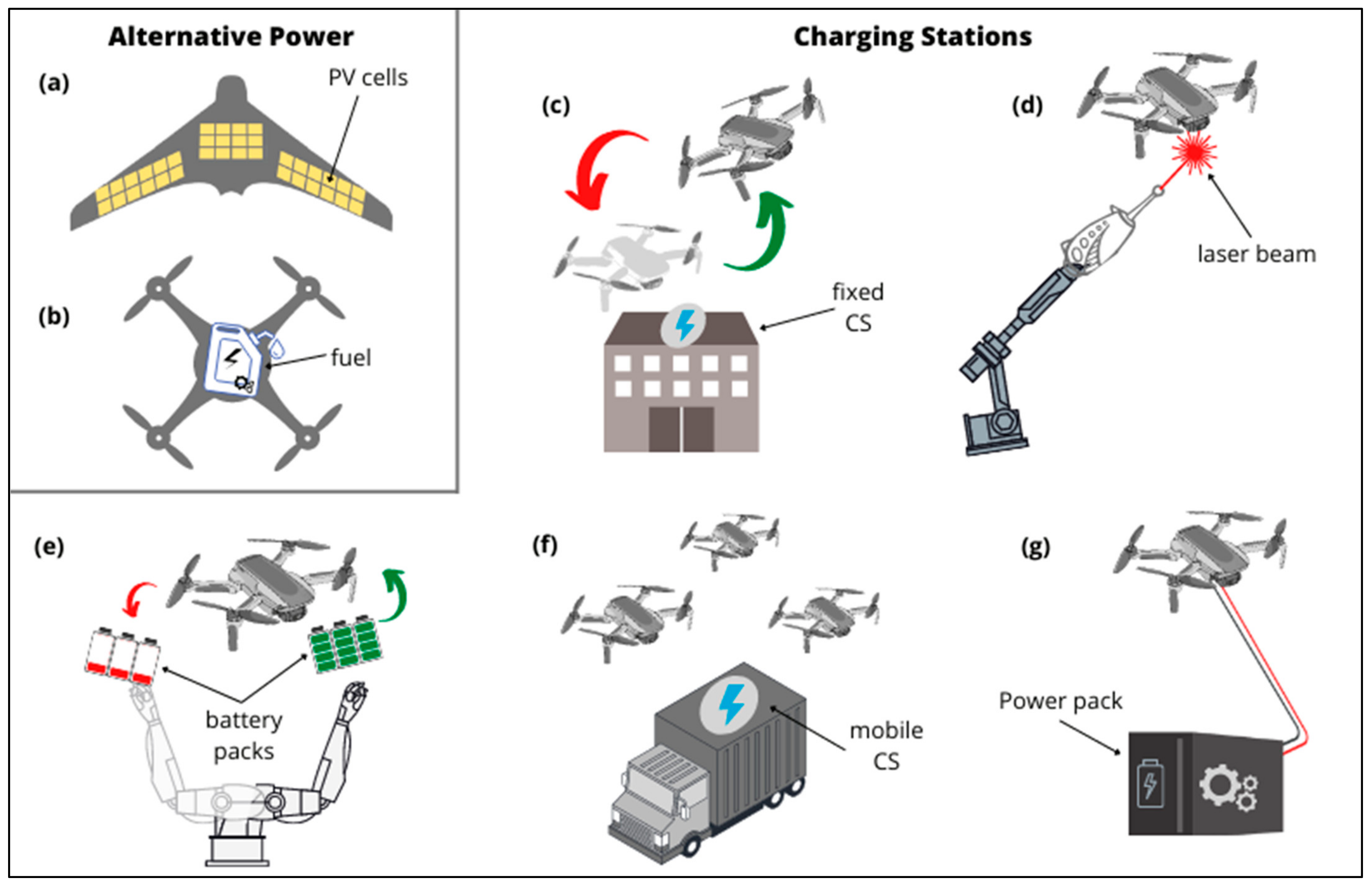
2.4. Power Management
3. Applications and Algorithms
3.1. Crowd Detection and Monitoring
3.2. Crowd Size Estimation
3.3. Crowd Tracking
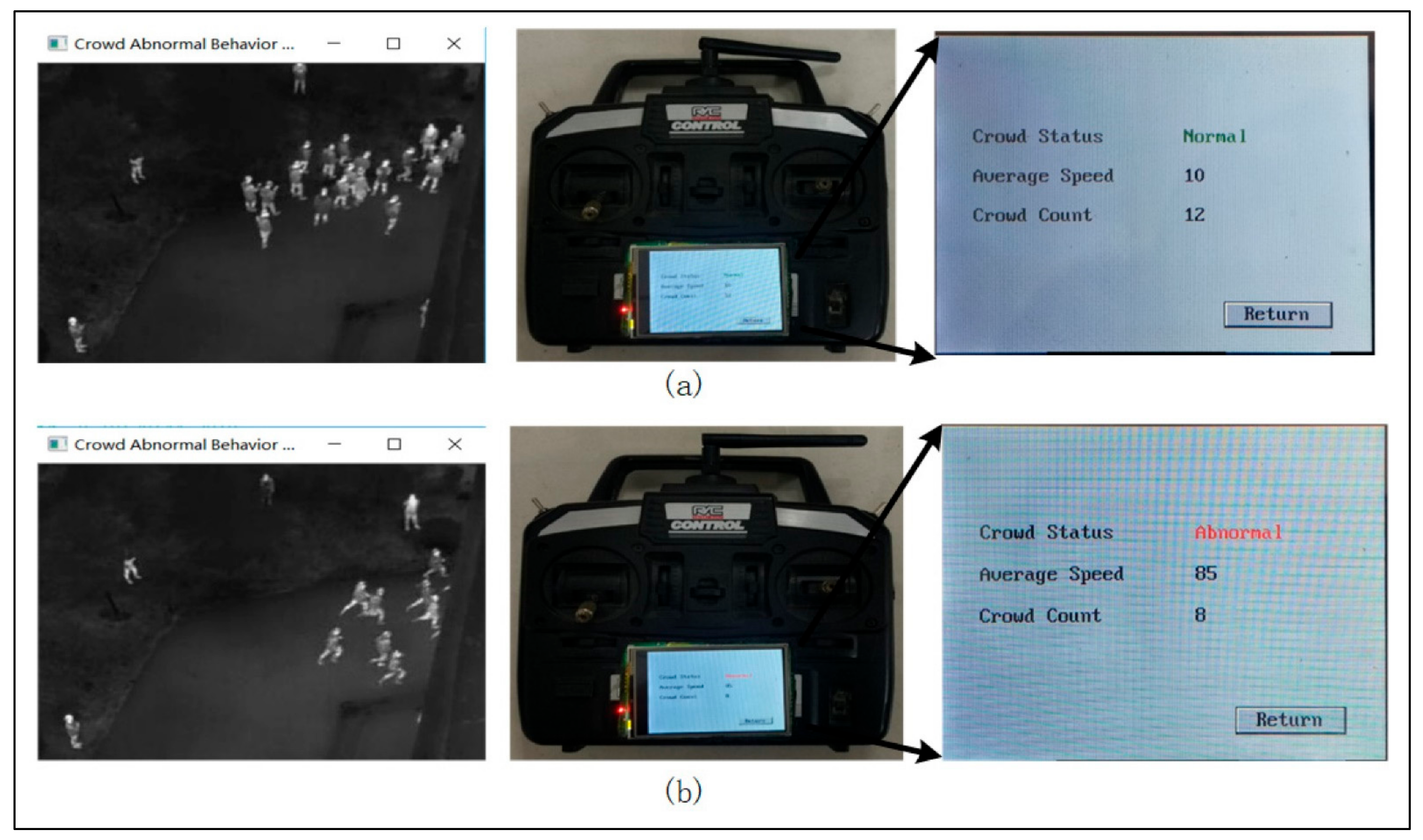
3.4. Crowd Analyses
4. Privacy, Safety and Ethical Implications
4.1. Legal Frameworks
4.2. Safety Considerations
4.3. Privacy and Ethical Implications
5. Outlook and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Alaska, Y.A.; Aldawas, A.D.; Aljerian, N.A.; Memish, Z.A.; Suner, S. The impact of crowd control measures on the occurrence of stampedes during Mass Gatherings: The Hajj experience. Travel Med. Infect. Dis. 2017, 15, 67–70. [Google Scholar] [CrossRef] [PubMed]
- Illiyas, F.T.; Mani, S.K.; Pradeepkumar, A.P.; Mohan, K. Human stampedes during religious festivals: A comparative review of mass gathering emergencies in India. Int. J. Disaster Risk Reduct. 2013, 5, 10–18. [Google Scholar] [CrossRef]
- Memish, Z.A.; Steffen, R.; White, P.; Dar, O.; Azhar, E.I.; Sharma, A.; Zumla, A. Mass gatherings medicine: Public health issues arising from mass gathering religious and sporting events. Lancet 2019, 393, 2073–2084. [Google Scholar] [CrossRef]
- Skogan, W.G. The future of CCTV. Criminol. Public Policy 2019, 18, 161–166. [Google Scholar] [CrossRef]
- Tang, Y.; Miao, Y.; Barnawi, A.; Alzahrani, B.; Alotaibi, R.; Hwang, K. A joint global and local path planning optimization for UAV task scheduling towards crowd air monitoring. Comput. Netw. 2021, 193, 107913. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, Z.; Li, M.; Son, Y.-J.; Liu, J. DDDAS-Based Information-Aggregation for Crowd Dynamics Modeling with UAVs and UGVs. Front. Robot. AI 2015, 2. [Google Scholar] [CrossRef]
- Castellano, G.; Castiello, C.; Mencar, C.; Vessio, G. Crowd Counting from Unmanned Aerial Vehicles with Fully-Convolutional Neural Networks. In Proceedings of the 2020 International Joint Conference on Neural Networks (IJCNN 2020), Glasgow, UK, 19–24 July 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–8. [Google Scholar]
- Kuchhold, M.; Simon, M.; Eiselein, V.; Sikora, T. Scale-Adaptive Real-Time Crowd Detection and Counting for Drone Images. In Proceedings of the 2018 25th IEEE International Conference on Image Processing (ICIP 2018), Athens, Greece, 7–10 October 2018; pp. 943–947. [Google Scholar]
- Panday, U.S.; Pratihast, A.K.; Aryal, J.; Kayastha, R.B. A review on drone-based data solutions for cereal crops. Drones 2020, 4, 41. [Google Scholar] [CrossRef]
- Butcher, P.A.; Colefax, A.P.; Gorkin, R.A.; Kajiura, S.M.; López, N.A.; Mourier, J.; Purcell, C.R.; Skomal, G.B.; Tucker, J.P.; Walsh, A.J.; et al. The drone revolution of shark science: A review. Drones 2021, 5, 8. [Google Scholar] [CrossRef]
- Budiharto, W.; Chowanda, A.; Gunawan, A.A.S.; Irwansyah, E.; Suroso, J.S. A Review and Progress of Research on Autonomous Drone in Agriculture, Delivering Items and Geographical Information Systems (GIS). In Proceedings of the 2019 2nd World Symposium on Communication Engineering (WSCE), Nagoya, Japan, 20–23 December 2019; pp. 205–209. [Google Scholar]
- Mogili, U.R.; Deepak, B.B.V.L. Review on Application of Drone Systems in Precision Agriculture. In Proceedings of the Procedia Computer Science; Elsevier B.V.: Amsterdam, The Netherlands, 2018; Volume 133, pp. 502–509. [Google Scholar]
- Esposito, M.; Crimaldi, M.; Cirillo, V.; Sarghini, F.; Maggio, A. Drone and sensor technology for sustainable weed management: A review. Chem. Biol. Technol. Agric. 2021 81 2021, 8, 1–11. [Google Scholar] [CrossRef]
- Wu, D.; Li, R.; Zhang, F.; Liu, J. A review on drone-based harmful algae blooms monitoring. Environ. Monit. Assess. 1914 2019, 191, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Shahmoradi, J.; Talebi, E.; Roghanchi, P.; Hassanalian, M. A comprehensive review of applications of drone technology in the mining industry. Drones 2020, 4, 34. [Google Scholar] [CrossRef]
- Saraf, V.; Senapati, L.; Swarnkar, T. Application and Progress of Drone Technology in the COVID-19 Pandemic. 2020. Available online: https://www.taylorfrancis.com/chapters/edit/10.1201/9781003137481-4/application-progress-drone-technology-covid-19-pandemic-vasundhara-saraf-lipsita-senapati-tripti-swarnkar (accessed on 18 September 2021).
- Almagbile, A. Detecting And Estimating The Levels of Crowd Density From UAV Imagery. Dirasat Hum. Soc. Sci. 2019, 46, 294. [Google Scholar] [CrossRef]
- Schulte, S.; Hillen, F.; Prinz, T. Analysis of combined UAV-based RGB and thermal remote sensing data: A new approach to crowd monitoring. In International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences-ISPRS Archives; Copernicus GmbH: Göttingen, Germany, 2017; Volume 42, pp. 347–354. [Google Scholar]
- Xiao, Y.; Zheng, H.; Yu, W. Automatic Crowd Detection Based on Unmanned Aerial Vehicle Thermal Imagery. In Advances in Intelligent Systems and Computing; Springer: Berlin/Heidelberg, Germany, 2018; Volume 690, pp. 510–516. [Google Scholar]
- Tzelepi, M.; Tefas, A. Graph Embedded Convolutional Neural Networks in Human Crowd Detection for Drone Flight Safety. IEEE Trans. Emerg. Top. Comput. Intell. 2019, 5, 191–204. [Google Scholar] [CrossRef]
- Xiao, Y.H.; Zhen, H. Pedestrian Crowd Detection Based Unmanned Aerial Vehicle Infrared Imagery. Appl. Mech. Mater. 2017, 873, 347–352. [Google Scholar] [CrossRef]
- Wang, Z.; Li, M.; Khaleghi, A.M.; Xu, D.; Lobos, A.; Vo, C.; Lien, J.M.; Liu, J.; Son, Y.J. DDDAMS-based crowd control via UAVs and UGVs. Procedia Comput. Sci. 2013, 18, 2028–2035. [Google Scholar] [CrossRef][Green Version]
- Peng, T.; Li, Q.; Zhu, P. RGB-T Crowd Counting from Drone: A Benchmark and MMCCN Network. In Proceedings of the Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2021; Volume 12627, pp. 497–513. [Google Scholar]
- Castellano, G.; Castiello, C.; Cianciotta, M.; Mencar, C. Multi-view Convolutional Network for Crowd Counting in Drone-Captured Images. Springer 2020, 12538 LNCS, 588–603. [Google Scholar] [CrossRef]
- Balbin, J.R.; Garcia, R.G.; Fernandez, K.E.D.; Golosinda, N.P.G.; Magpayo, K.D.G.; Velasco, R.J.B. Crowd counting system by facial recognition using Histogram of Oriented Gradients, Completed Local Binary Pattern, Gray-Level Co-Occurrence Matrix and Unmanned Aerial Vehicle. In Proceedings of the Third International Workshop on Pattern Recognition, Jinan, China, 26–28 May 2018; p. 58. [Google Scholar]
- Liu, W.; Lis, K.; Salzmann, M.; Fua, P. Geometric and Physical Constraints for Drone-Based Head Plane Crowd Density Estimation. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 244–249. [Google Scholar]
- Choi-Fitzpatrick, A.; Juskauskas, T. Up in the Air: Applying the Jacobs Crowd Formula to Drone Imagery. Proc. Procedia Eng. 2015, 107, 273–281. [Google Scholar] [CrossRef][Green Version]
- Trotta, A.; Muncuk, U.; Di Felice, M.; Chowdhury, K.R. Persistent Crowd Tracking Using Unmanned AerIal Vehicle Swarms: A Novel Framework for Energy and Mobility Management. IEEE Veh. Technol. Mag. 2020, 15, 96–103. [Google Scholar] [CrossRef]
- Müller, T.; Müller, M. Vision-based drone flight control and crowd or riot analysis with efficient color histogram based tracking. In Proceedings of the Airborne Intelligence, Surveillance, Reconnaissance (ISR) Systems and Applications VIII, Orlando, FL, USA, 25 May 2011; Volume 8020R, p. 80200. [Google Scholar]
- Shao, Y.; Li, W.; Chu, H.; Chang, Z.; Zhang, X.; Zhan, H. A multitask cascading cnn with multiscale infrared optical flow feature fusion-based abnormal crowd behavior monitoring UAV. Sensors 2020, 20, 5550. [Google Scholar] [CrossRef]
- Singh, A.; Patil, D.; Omkar, S.N. Eye in the sky: Real-time drone surveillance system (DSS) for violent individuals identification using scatternet hybrid deep learning network. IEEE Comput. Soc. Conf. Comput. Vis. Pattern Recognit. Work. 2018, 2018, 1629–1637. [Google Scholar] [CrossRef]
- Wen, L.; Du, D.; Zhu, P.; Hu, Q.; Wang, Q.; Bo, L.; Lyu, S. Drone-based Joint Density Map Estimation, Localization and Tracking with Space-Time Multi-Scale Attention Network. arXiv 2019, arXiv:1912.01811. [Google Scholar]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Drone Types: Multi-Rotor, vs. Fixed-Wing vs. Single Rotor vs Hybrid VTOL|AUAV. Available online: https://www.auav.com.au/articles/drone-types/ (accessed on 4 August 2021).
- Zaludin, Z.; Harituddin, A.S.M. Challenges and Trends of Changing from Hover to Forward Flight for a Converted Hybrid Fixed Wing VTOL UAS from Automatic Flight Control System Perspective. In Proceedings of the 2019 IEEE 9th International Conference on System Engineering and Technology (ICSET), Shah Alam, Malaysia, 7 October 2019; pp. 247–252. [Google Scholar]
- The U.S. China Trade War and DJI’s Drone Market Share–DRONELIFE. Available online: https://dronelife.com/2021/03/05/has-the-u-s-china-trade-war-changed-djis-drone-market-share-the-latest-from-drone-industry-insights/ (accessed on 4 August 2021).
- Bhattarai, N.; Nakamura, T.; Mozumder, C. Real Time Human Detection and Localization Using Consumer Grade Camera and Commercial UAV. Preprints 2018. [Google Scholar] [CrossRef]
- Koubaa, A.; Allouch, A.; Alajlan, M.; Javed, Y.; Belghith, A.; Khalgui, M. Micro Air Vehicle Link (MAVlink) in a Nutshell: A Survey. IEEE Access 2019, 7, 87658–87680. [Google Scholar] [CrossRef]
- Dietrich, T.; Andryeyev, O.; Zimmermann, A.; Mitschele-Thiel, A. Towards a Unified Decentralized Swarm Management and Maintenance Coordination Based on MAVLink. In Proceedings of the 2016 International Conference on Autonomous Robot Systems and Competitions (ICARSC), Braganca, Portugal, 4–6 May 2016; pp. 124–129. [Google Scholar]
- Zhou, Z.; Zhang, C.; Xu, C.; Xiong, F.; Zhang, Y.; Umer, T. Energy-Efficient Industrial Internet of UAVs for Power Line Inspection in Smart Grid. IEEE Trans. Ind. Inform. 2018, 14, 2705–2714. [Google Scholar] [CrossRef]
- Shi, W.; Zhou, H.; Li, J.; Xu, W.; Zhang, N.; Shen, X. Drone Assisted Vehicular Networks: Architecture, Challenges and Opportunities. IEEE Netw. 2018, 32, 130–137. [Google Scholar] [CrossRef]
- Lin, C.; He, D.; Kumar, N.; Choo, K.K.R.; Vinel, A.; Huang, X. Security and Privacy for the Internet of Drones: Challenges and Solutions. IEEE Commun. Mag. 2018, 56, 64–69. [Google Scholar] [CrossRef]
- Koubaa, A.; Qureshi, B.; Sriti, M.-F.; Javed, Y.; Tovar, E. A service-oriented Cloud-based management system for the Internet-of-Drones. In Proceedings of the 2017 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Coimbra, Portugal, 26–28 April 2017; pp. 329–335. [Google Scholar]
- Yahuza, M.; Idris, M.Y.I.; Ahmedy, I.B.; Wahab, A.W.A.; Nandy, T.; Noor, N.M.; Bala, A. Internet of Drones Security and Privacy Issues: Taxonomy and Open Challenges. IEEE Access 2021, 9, 57243–57270. [Google Scholar] [CrossRef]
- Saha, A.K.; Saha, J.; Ray, R.; Sircar, S.; Dutta, S.; Chattopadhyay, S.P.; Saha, H.N. IOT-based drone for improvement of crop quality in agricultural field. In Proceedings of the 2018 IEEE 8th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 8–10 January 2018; Volume 2018, pp. 612–615. [Google Scholar]
- Chae, H.; Park, J.H.; Song, H.N.; Kim, Y.H.; Jeong, H.W. The IoT based automate landing system of a drone for the round-the-clock surveillance solution. In Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, Korea, 7–11 July 2015; pp. 1575–1580. [Google Scholar]
- Diesel-Powered Drone Set New Multi-Day World Record For Longest Flight|Digital Trends. Available online: https://www.digitaltrends.com/cool-tech/drone-unmanned-flight-record/ (accessed on 21 August 2021).
- HYBRIX 2.1 Sets New World Record for UAV Flight Time: 10 h, 14 min-UASweekly.com. Available online: https://uasweekly.com/2020/10/26/hybrix-2-1-sets-new-world-record-for-uav-flight-time-10-hours-14-minutes/ (accessed on 21 August 2021).
- Williams, A.; Yakimenko, O. Persistent mobile aerial surveillance platform using intelligent battery health management and drone swapping. In Proceedings of the 2018 4th International Conference on Control, Automation and Robotics (ICCAR), Auckland, New Zealand, 20–23 April 2018; pp. 237–246. [Google Scholar]
- Galkin, B.; Kibilda, J.; DaSilva, L.A. UAVs as Mobile Infrastructure: Addressing Battery Lifetime. IEEE Commun. Mag. 2019, 57, 132–137. [Google Scholar] [CrossRef]
- Nugent, T.; Kare, J. Laser Power for UAVs. 2010. Available online: https://silo.tips/download/lasermotive-white-paper-power-beaming-for-uavs-a-white-paper-by-tj-nugent-and-jt (accessed on 11 September 2021).
- Ouyang, J.; Che, Y.; Xu, J.; Wu, K. Throughput Maximization for Laser-Powered UAV Wireless Communication Systems. In Proceedings of the 2018 IEEE International Conference on Communications Workshops (ICC Workshops), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar]
- Lu, M.; Bagheri, M.; James, A.P.; Phung, T. Wireless Charging Techniques for UAVs: A Review, Reconceptualization, and Extension. IEEE Access 2018, 6, 29865–29884. [Google Scholar] [CrossRef]
- Prior, S.D. Tethered Drones for Persistent Aerial Surveillance Applications. 2015. Available online: http://blog.soton.ac.uk/robotics/files/2015/08/Your-article-pages-78-79.pdf (accessed on 11 September 2021).
- Liang, X.; Zhao, S.; Chen, G.; Tong, G.; Jiang, L.; Zhang, W. Design and Development of Ground Control System for Tethered UAV. In Proceedings of the 2019 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 17–19 October 2019; pp. 291–296. [Google Scholar]
- Walendziuk, W.; Falkowski, P.; Kulikowski, K. The Analysis of Power Supply Topologies for Tethered Drone Applications. Proceedings 2020, 51, 25. [Google Scholar] [CrossRef]
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. Power Supply Architectures for Drones-A Review. In Proceedings of the IECON 2019-45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 2019, pp. 5826–5831. [Google Scholar]
- Fagiano, L. Systems of Tethered Multicopters: Modeling and Control Design. IFAC-PapersOnLine 2017, 50, 4610–4615. [Google Scholar] [CrossRef]
- Al-Sheary, A. Ali Almagbile Crowd Monitoring System Using Unmanned Aerial Vehicle (UAV). J. Civ. Eng. Archit. 2017, 11, 1014–1024. [Google Scholar] [CrossRef]
- Minaeian, S.; Liu, J.; Son, Y.J. Effective and Efficient Detection of Moving Targets from a UAV’s Camera. IEEE Trans. Intell. Transp. Syst. 2018, 19, 497–506. [Google Scholar] [CrossRef]
- Burkert, F.; Fraundorfer, F. UAV-Based Monitoring of Pedestrian Groups. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W2, 67–72. [Google Scholar] [CrossRef]
- Sindagi, V.A.; Patel, V.M. A survey of recent advances in CNN-based single image crowd counting and density estimation. Pattern Recognit. Lett. 2018, 107, 3–16. [Google Scholar] [CrossRef]
- Almagbile, A. Estimation of crowd density from UAVs images based on corner detection procedures and clustering analysis. Geo-Spatial Inf. Sci. 2019, 22, 23–34. [Google Scholar] [CrossRef]
- Khan, A.; Ali Shah, J.; Kadir, K.; Albattah, W.; Khan, F. Crowd Monitoring and Localization Using Deep Convolutional Neural Network: A Review. Appl. Sci. 2020, 10, 4781. [Google Scholar] [CrossRef]
- Bovik, A.C. The Essential Guide to Image Processing. 2009. Available online: https://books.google.com.hk/books?hl=zh-CN&lr=&id=6TOUgytafmQC&oi=fnd&pg=PP1&dq=The+Essential+Guide+to+Image+Processing&ots=mahTo8MWsv&sig=kvA7kePjBfH8o_t5_A8_OE4CBI&redir_esc=y#v=onepage&q=The%20Essential%20Guide%20to%20Image%20Processing&f=false (accessed on 7 September 2021).
- Pirsiavash, H.; Ramanan, D.; Fowlkes, C.C. Globally-optimal greedy algorithms for tracking a variable number of objects. In Proceedings of the CVPR 2011, Colorado Springs, CO, USA, 20–25 June 2011; pp. 1201–1208. [Google Scholar]
- Nagrare, S.R.; Chopra, O.; Jana, S.; Ghose, D. Decentralized Path Planning Approach for Crowd Surveillance using Drones. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; pp. 1020–1028. [Google Scholar]
- Zhu, P.; Wen, L.; Bian, X.; Ling, H.; Hu, Q. Vision Meets Drones: A Challenge. arXiv 2018, arXiv:1804.07437. Available online: https://arxiv.org/abs/1804.07437 (accessed on 14 September 2021).
- Yu, H.; Li, G.; Zhang, W.; Huang, Q.; Du, D.; Tian, Q.; Sebe, N. The Unmanned Aerial Vehicle Benchmark: Object Detection, Tracking and Baseline. Int. J. Comput. Vis. 2020, 128, 1141–1159. [Google Scholar] [CrossRef]
- Khel, M.H.K.; Kadir, K.; Albattah, W.; Khan, S.; Noor, M.; Nasir, H.; Habib, S.; Islam, M.; Khan, A. Real-Time Monitoring of COVID-19 SOP in Public Gathering Using Deep Learning Technique. Emerg. Sci. J. 2021, 5, 182–196. [Google Scholar] [CrossRef]
- Burkert, F.; Butenuth, M. Complex Event Detection in Pedestrian Groups from UAVs. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 1, 335–340. [Google Scholar] [CrossRef]
- Penmetsa, S.; Minhuj, F.; Singh, A.; Omkar, S.N. Autonomous UAV for suspicious action detection using pictorial human pose estimation and classification. Electron. Lett. Comput. Vis. Image Anal. 2014, 13, 18–32. [Google Scholar] [CrossRef]
- Felemban, E.; Sheikh, A.A.; Naseer, A. Improving response time for crowd management in hajj. Computers 2021, 10, 46. [Google Scholar] [CrossRef]
- Tsiamis, N.; Efthymiou, L.; Tsagarakis, K.P. A Comparative Analysis of the Legislation Evolution for Drone Use in OECD Countries. Drones 2019, 3, 75. [Google Scholar] [CrossRef]
- Jones, T. International Commercial Drone Regulation and Drone Delivery Services. 2017. Available online: https://www.rand.org/content/dam/rand/pubs/research_reports/RR1700/RR1718z3/RAND_RR1718z3.pdf (accessed on 11 September 2021).
- Luppicini, R.; So, A. A technoethical review of commercial drone use in the context of governance, ethics, and privacy. Technol. Soc. 2016, 46, 109–119. [Google Scholar] [CrossRef]
- Civil drones (Unmanned Aircraft)|EASA. Available online: https://www.easa.europa.eu/domains/civil-drones-rpas (accessed on 10 September 2021).
- What is an ‘Assembly of People’?|EASA. Available online: https://www.easa.europa.eu/faq/116553 (accessed on 10 September 2021).
- Operations Over People General Overview. Available online: https://www.faa.gov/uas/commercial_operators/operations_over_people/ (accessed on 10 September 2021).
- Johnson, J.A.; Svach, M.R.; Brown, L.H. Drone and Other Hobbyist Aircraft Injuries Seen in U.S. Emergency Departments, 2010–2017. Am. J. Prev. Med. 2019, 57, 826–829. [Google Scholar] [CrossRef]
- Khan, A.; Brown, L. Recreational Drone-Related Injuries in Children: A Review of National Electronic Injury Surveillance System (NEISS) Data. Cureus 2021, 13, 13–17. [Google Scholar] [CrossRef] [PubMed]
- Forrester, M.B. Drone-related injuries treated at emergency departments. Am. J. Emerg. Med. 2019, 37, 2116–2117. [Google Scholar] [CrossRef] [PubMed]
- Chung, L.K.; Cheung, Y.; Lagman, C.; Au Yong, N.; McBride, D.Q.; Yang, I. Skull fracture with effacement of the superior sagittal sinus following drone impact: A case report. Child’s Nerv. Syst. 2017, 33, 1609–1611. [Google Scholar] [CrossRef]
- Moskowitz, E.E.; Siegel-Richman, Y.M.; Hertner, G.; Schroeppel, T. Aerial drone misadventure: A novel case of trauma resulting in ocular globe rupture. Am. J. Ophthalmol. Case Rep. 2018, 10, 35–37. [Google Scholar] [CrossRef] [PubMed]
- Castellano, G.; Castiello, C.; Mencar, C.; Vessio, G. Crowd Detection for Drone Safe Landing Through Fully-Convolutional Neural Networks. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); LNCS; Springer: Berlin/Heidelberg, Germany, 2020; Volume 12011, pp. 301–312. ISBN 9783030389185. [Google Scholar]
- Tzelepi, M.; Tefas, A. Human crowd detection for drone flight safety using convolutional neural networks. In Proceedings of the 2017 25th European Signal Processing Conference (EUSIPCO), Kos, Greece, 28 August–2 September 2017; pp. 743–747. [Google Scholar]
- Kornatowski, P.M.; Feroskhan, M.; Stewart, W.J.; Floreano, D. A Morphing Cargo Drone for Safe Flight in Proximity of Humans. IEEE Robot. Autom. Lett. 2020, 5, 4233–4240. [Google Scholar] [CrossRef]
- Waibel, M.; Augugliaro, F. Drone Shows: Creative Potential and Best Practices. 2017. Available online: https://www.research-collection.ethz.ch/bitstream/handle/20.500.11850/125498/eth-50527-01.pdf (accessed on 12 September 2021).
- Winkler, S.; Zeadally, S.; Evans, K. Privacy and civilian drone use: The need for further regulation. IEEE Secur. Priv. 2018, 16, 72–80. [Google Scholar] [CrossRef]
- Ljungholm, D.P. Regulating government and private use of unmanned aerial vehicles: Drone policymaking, law enforcement deployment, and privacy concerns. Anal. Metaphys. 2019, 18, 16–22. [Google Scholar] [CrossRef]
- Thomasen, K. Beyond Airspace Safety: A Feminist Perspective on Drone Privacy Regulation. SSRN Electron. J. 2018, 16. [Google Scholar] [CrossRef]
- Telecommunications, N.; Administration, I. Voluntary Best Practices for UAS Privacy, Transparency, and Accountability. 2016. Available online: https://knowbeforeyoufly.org/knowbeforeyoufly/how-to-fly/uas-best-practices (accessed on 20 September 2021).
- Scharf, R.L. Drone Invasion: Unmanned Aerial Vehicles and the Right to Privacy. 2019. Available online: https://scholars.law.unlv.edu/facpub/1217/ (accessed on 18 September 2021).
- Li, Z.; Gao, C.; Yue, Q.; Fu, X. Toward Drone Privacy via Regulating Altitude and Payload. In Proceedings of the 2019 International Conference on Computing, Networking and Communications (ICNC), Honolulu, HI, USA, 18–21 February 2019; pp. 562–566. [Google Scholar]
- Finn, R.L.; Wright, D. Privacy, data protection and ethics for civil drone practice: A survey of industry, regulators and civil society organisations. Comput. Law Secur. Rev. 2016, 32, 577–586. [Google Scholar] [CrossRef]
- Finn, R.; Donovan, A. Big Data, Drone Data: Privacy and Ethical Impacts of the Intersection Between Big Data and Civil Drone Deployments. 2016. Available online: https://www.researchgate.net/publication/309182307_Big_Data_Drone_Data_Privacy_and_Ethical_Impacts_of_the_Intersection_Between_Big_Data_and_Civil_Drone_Deployments (accessed on 17 September 2021).
- Taha, B.; Shoufan, A. Machine Learning-Based Drone Detection and Classification: State-of-the-Art in Research. IEEE Access 2019, 7, 138669–138682. [Google Scholar] [CrossRef]
- Liu, H.; Wei, Z.; Chen, Y.; Pan, J.; Lin, L.; Ren, Y. Drone Detection Based on an Audio-Assisted Camera Array. In Proceedings of the 2017 IEEE Third International Conference on Multimedia Big Data (BigMM), Laguna Hills, CA, USA, 19–21 April 2017; pp. 402–406. [Google Scholar]
- Zheng, J.; Chen, R.; Yang, T.; Liu, X.; Liu, H.; Su, T.; Wan, L. An Efficient Strategy for Accurate Detection and Localization of UAV Swarms. IEEE Internet Things J. 2021, 8, 15372–15381. [Google Scholar] [CrossRef]
- Zheng, J.; Yang, T.; Liu, H.; Su, T.; Wan, L. Accurate Detection and Localization of Unmanned Aerial Vehicle Swarms-Enabled Mobile Edge Computing System. IEEE Trans. Ind. Inform. 2021, 17, 5059–5067. [Google Scholar] [CrossRef]
- Heszlein-Lossius, H.; Al-Borno, Y.; Shaqqoura, S.; Skaik, N.; Melvaer Giil, L.; Gilbert, M.F. Traumatic amputations caused by drone attacks in the local population in Gaza: A retrospective cross-sectional study. Lancet Planet. Health 2019, 3, e40–e47. [Google Scholar] [CrossRef]
- Byman, D. Why drones work: The case for Washington’s weapon of choice. Foreign Aff. 2013, 92, 32. [Google Scholar]
- Boyle, M.J. The legal and ethical implications of drone warfare. Int. J. Hum. Rights 2015, 19, 105–126. [Google Scholar] [CrossRef]
- Xiao, W.; Li, M.; Alzahrani, B.; Alotaibi, R.; Barnawi, A.; Ai, Q. A Blockchain-Based Secure Crowd Monitoring System Using UAV Swarm. IEEE Netw. 2021, 35, 108–115. [Google Scholar] [CrossRef]
- Chamola, V.; Hassija, V.; Gupta, V.; Guizani, M. A Comprehensive Review of the COVID-19 Pandemic and the Role of IoT, Drones, AI, Blockchain, and 5G in Managing its Impact. IEEE Access 2020, 8, 90225–90265. [Google Scholar] [CrossRef]
- Chen, X.; Tang, J.; Lao, S. Review of Unmanned Aerial Vehicle Swarm Communication Architectures and Routing Protocols. Appl. Sci. 2020, 10, 3661. [Google Scholar] [CrossRef]
- Conte, C.; de Alteriis, G.; De Pandi, F.; Caputo, E.; Lo Moriello, R.S.; Rufino, G.; Accardo, D. Performance Analysis for Human Crowd Monitoring to Control COVID-19 disease by Drone Surveillance. In Proceedings of the 2021 IEEE 8th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Naples, Italy, 23–25 June 2021; pp. 31–36. [Google Scholar]
- Alsamhi, S.H.; Lee, B.; Guizani, M.; Kumar, N.; Qiao, Y.; Liu, X. Blockchain for Decentralized Multi-Drone to Combat COVID-19. arXiv 2021, arXiv:2102.00969. [Google Scholar]
- Kumar, A.; Sharma, K.; Singh, H.; Naugriya, S.G.; Gill, S.S.; Buyya, R. A drone-based networked system and methods for combating coronavirus disease (COVID-19) pandemic. Futur. Gener. Comput. Syst. 2021, 115, 1–19. [Google Scholar] [CrossRef]
- Du, D.; Wen, L.; Zhu, P.; Fan, H.; Hu, Q.; Ling, H.; Shah, M.; Pan, J.; Al-Ali, A.; Mohamed, A.; et al. VisDrone-CC2020: The Vision Meets Drone Crowd Counting Challenge Results. In Proceedings of the Computer Vision — ECCV 2020 Workshops; Glasgow, UK, 23–28 August 2020, Bartoli, A., Fusiello, A., Eds.; Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2020; Volume 12538, pp. 675–691. [Google Scholar] [CrossRef]
- Fan, H.; Du, D.; Wen, L.; Zhu, P.; Hu, Q.; Ling, H.; Shah, M.; Pan, J.; Schumann, A.; Dong, B.; et al. VisDrone-MOT2020: The Vision Meets Drone Multiple Object Tracking Challenge Results. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); LNCS; Springer: Berlin/Heidelberg, Germany, 2020; Volume 12538, pp. 713–727. ISBN 9783030668228. [Google Scholar]
- Military Drones May Have Attacked Humans for First Time without Being Instructed to, UN Report Says|The Independent. Available online: https://www.independent.co.uk/life-style/gadgets-and-tech/drone-fully-automated-military-kill-b1856815.html (accessed on 14 September 2021).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Make/Model | Visual Sensor | Image Resolution (px) | Onboard Sensors | Communication | Reference |
|---|---|---|---|---|---|
| DJI Phantom 4, DJI Phantom 4 Pro and DJI Mavic | RGB + Thermal | 512 × 640 (Thermal) | - | - | [23] |
| Microdrones MD4-1000 | RGB + Thermal | 1920 × 1080 (RGB) 320 × 240 (Thermal) | - | - | [18] |
| DJI Matrice 100 | RGB | - | - | - | [28] |
| DJI Phantom 4 Pro | RGB | - | - | - | [26] |
| Custom Quadcopter | Thermal | 336 × 256 | QGroundControl + MAVLink | [30] | |
| Custom Quadcopter | Thermal | 640 × 512 | - | - | [21] |
| Sensefly Xbee | RGB | - | - | Pix4d UAV | [59] |
| DJI Matrice 100 | RGB | - | GPS | - | [37] |
| DJI Phantom 4, DJIPhantom 4 Pro, DJI Mavic | RGB | 1920 × 1080 | - | - | [32] |
| 3DR X8+ | RGB | 720 × 960 | - | [60] | |
| Parrot AR 2.0 | 2 × RGB | 1280 × 720 (front facing) 320 × 240 (downward facing) | IMU Barometric sensor | Cloud computing | [31] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Husman, M.A.; Albattah, W.; Abidin, Z.Z.; Mustafah, Y.M.; Kadir, K.; Habib, S.; Islam, M.; Khan, S. Unmanned Aerial Vehicles for Crowd Monitoring and Analysis. Electronics 2021, 10, 2974. https://doi.org/10.3390/electronics10232974
Husman MA, Albattah W, Abidin ZZ, Mustafah YM, Kadir K, Habib S, Islam M, Khan S. Unmanned Aerial Vehicles for Crowd Monitoring and Analysis. Electronics. 2021; 10(23):2974. https://doi.org/10.3390/electronics10232974
Chicago/Turabian StyleHusman, Muhammad Afif, Waleed Albattah, Zulkifli Zainal Abidin, Yasir Mohd. Mustafah, Kushsairy Kadir, Shabana Habib, Muhammad Islam, and Sheroz Khan. 2021. "Unmanned Aerial Vehicles for Crowd Monitoring and Analysis" Electronics 10, no. 23: 2974. https://doi.org/10.3390/electronics10232974
APA StyleHusman, M. A., Albattah, W., Abidin, Z. Z., Mustafah, Y. M., Kadir, K., Habib, S., Islam, M., & Khan, S. (2021). Unmanned Aerial Vehicles for Crowd Monitoring and Analysis. Electronics, 10(23), 2974. https://doi.org/10.3390/electronics10232974