
Using a Two-Stage Method to Reject False Loop Closures and Improve the Accuracy of Collaborative SLAM Systems




Abstract
:1. Introduction
2. Related Works
2.1. False Loop-Closure Rejection for Single-Robot SLAM Systems
2.2. False Positive Closure Rejection in a Collaborative SLAM System
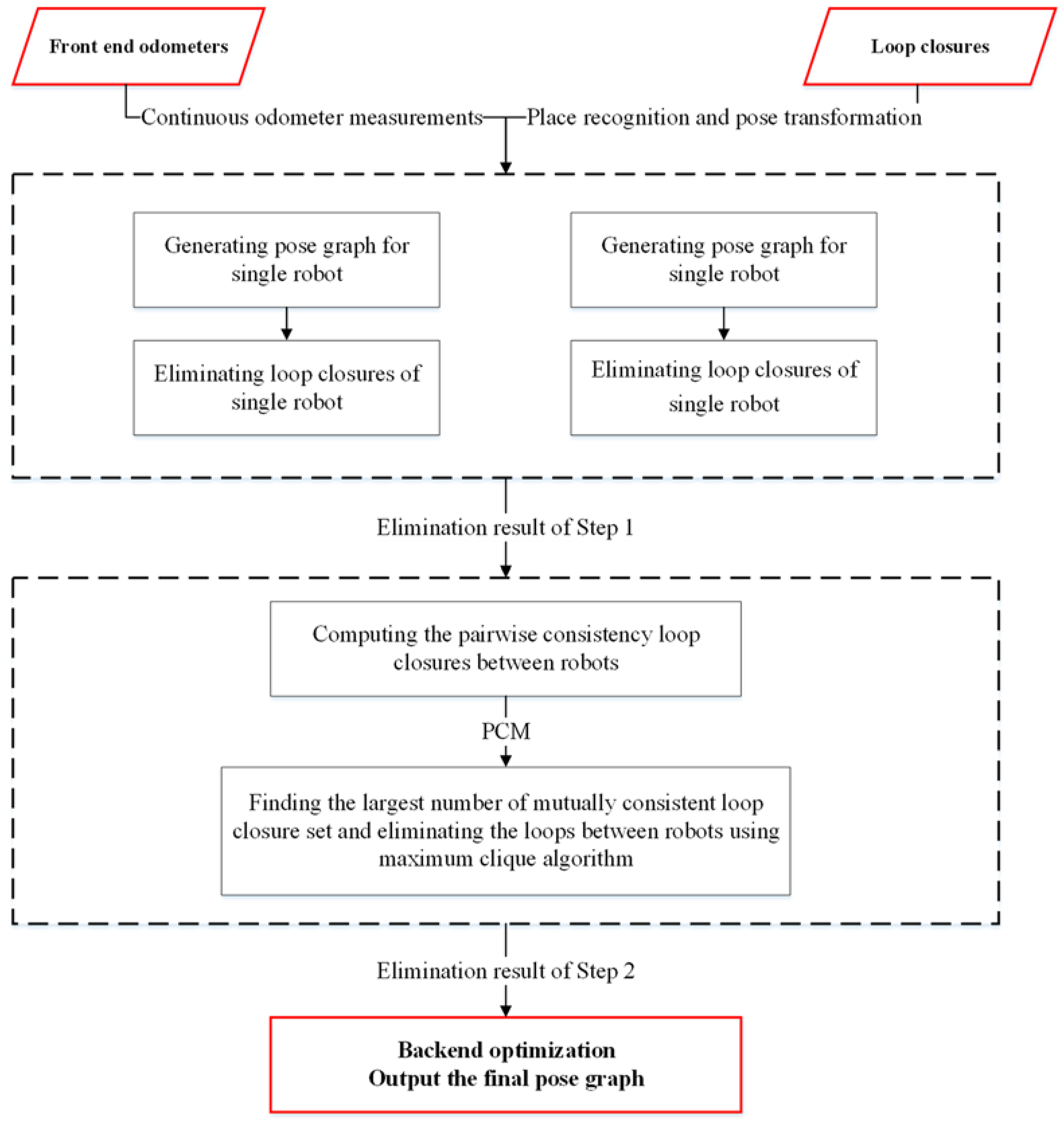
3. A Two-Stage Outlier Loop-Closure Rejection Algorithm
3.1. Pose Graph Model of Cooperative Robots
- (1)
- The odometer measurements for different robots and are represented using the solid yellow lines and solid blue ones respectively in Figure 2, denoted as symbols and where , and the set of odometer measurements are recorded as and ;
- (2)
- The loop closure in a single robot is represented by a dotted line in Figure 2, the corresponding symbols are and , and , and the set of loop-closure in a single robot is recorded as and . Loop closures can be detected using appearance-based loop closing approaches that work following the bag of words approach [4];
- (3)
- The relative pose measurements between different robots are marked with solid green lines with the symbol in Figure 2, and the set of loop-closure between different robots is recorded as . Calculating relative position between robots is similar in nature to finding loop closures in the single robot problem: both of them involve comparing a query scan to a set of cached scans. The distinction is that the query scan in the former problem is received from a different robot [28].
3.2. Consistency Checking of Loop-Closures Based on Test
3.3. First Step of Error Rejection: Rejection of Intra-Robot False Positive Loop-Closures
- Generate a set U to be inserted;
- For each newly detected loop-closure detection , verify whether it belongs to U according to Formula (5), and insert it if it does; otherwise, use all the measurement values in U to generate a new cluster, then clear U and insert into U;
- If there is no loop-closure detected, use the detection value in U to generate a new subset to complete the clustering.
- Consistency of a single loop-closure detection subset, which means that the sum of the Mahalanobis distance measured by a single loop-closure subset and the odometer passes the test;
- Consistency among multiple loop-closure subsets. Since the optimization direction of the loop-closure subset with larger errors is inconsistent with the correct loop closure due to the wrong place recognition result. Therefore, it can be judged whether the set of multiple loop-closure detection subsets and the sum of the Mahalanobis distance measured by the odometer can pass the test. If not, we need to find the subset that does not satisfy the consistency judgment standard in this loop-closure detection subset and reject it as a whole. The detailed steps will be explained in the consistency check algorithm between subsets.
| Algorithm 1. Check Algorithm inside Loop-closure Subsets |
| Input: - pose nodes, odometer measurements, loop-closure subset clusteri Output: - single loop-closure measurement subset
|
| Algorithm 2. Checking consistency among loop-closure detection subsets |
| Input: - goodSet, candidateSet, PoseGraphOd which only contains pose nodes and odometer measurement Output: - goodSet, rejectSet
|
| Algorithm 3. The first step of the error rejection algorithm |
| Input: - pose nodes, Odometer measurements, Loop-closure subset C that includes Loop-closure Output: - goodSet
|
3.4. The Second Step of Error Rejection: Reject False Positive Loop-Closure Detection among Cooperative Robots
| Algorithm 4. Second step of error rejection algorithm |
| Input:- Pose nodes, odometer measurements, intra-robot loop closure set C that Output: - Maximum mutual consistency set max_clique:
|
4. Experiments and Analysis
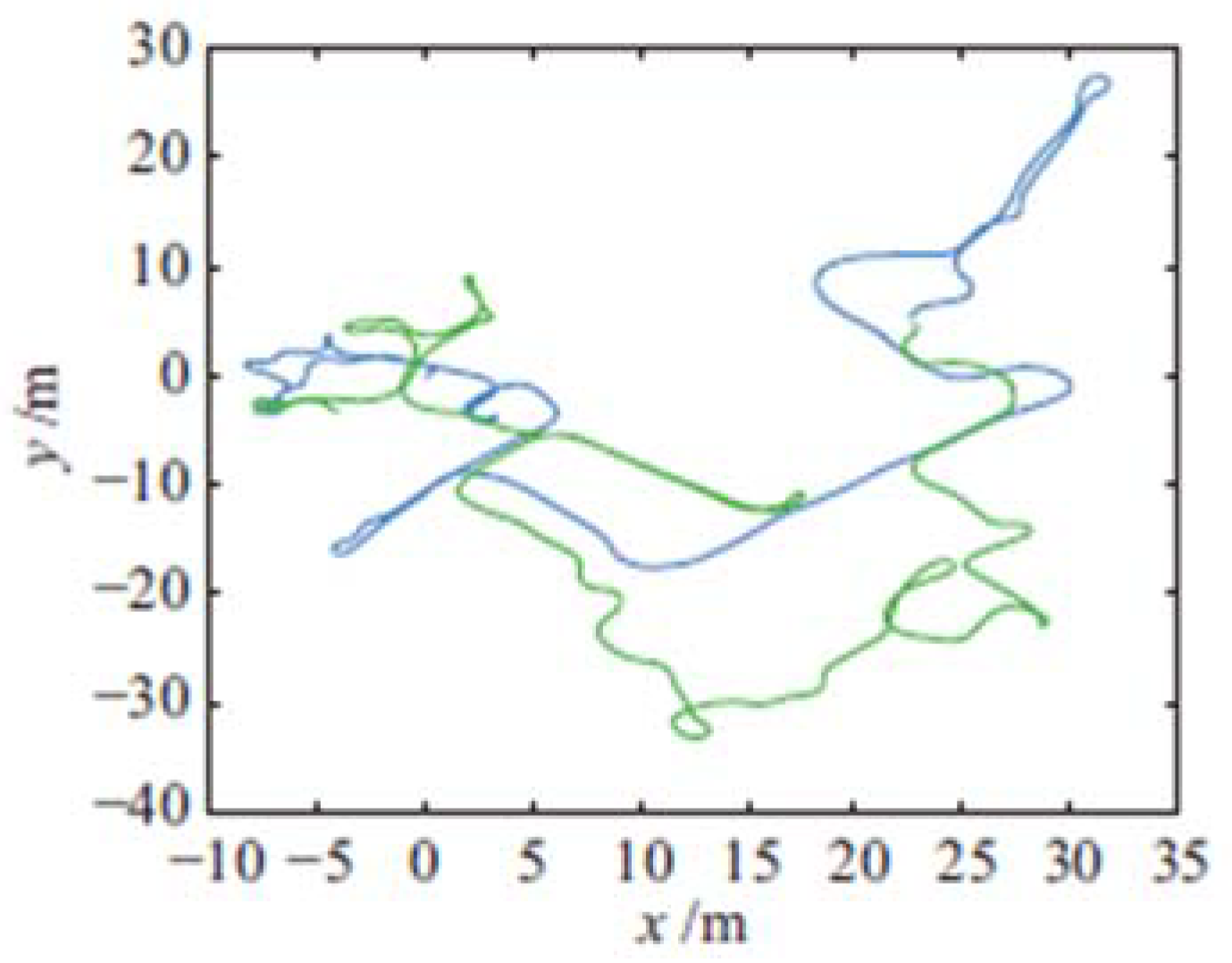
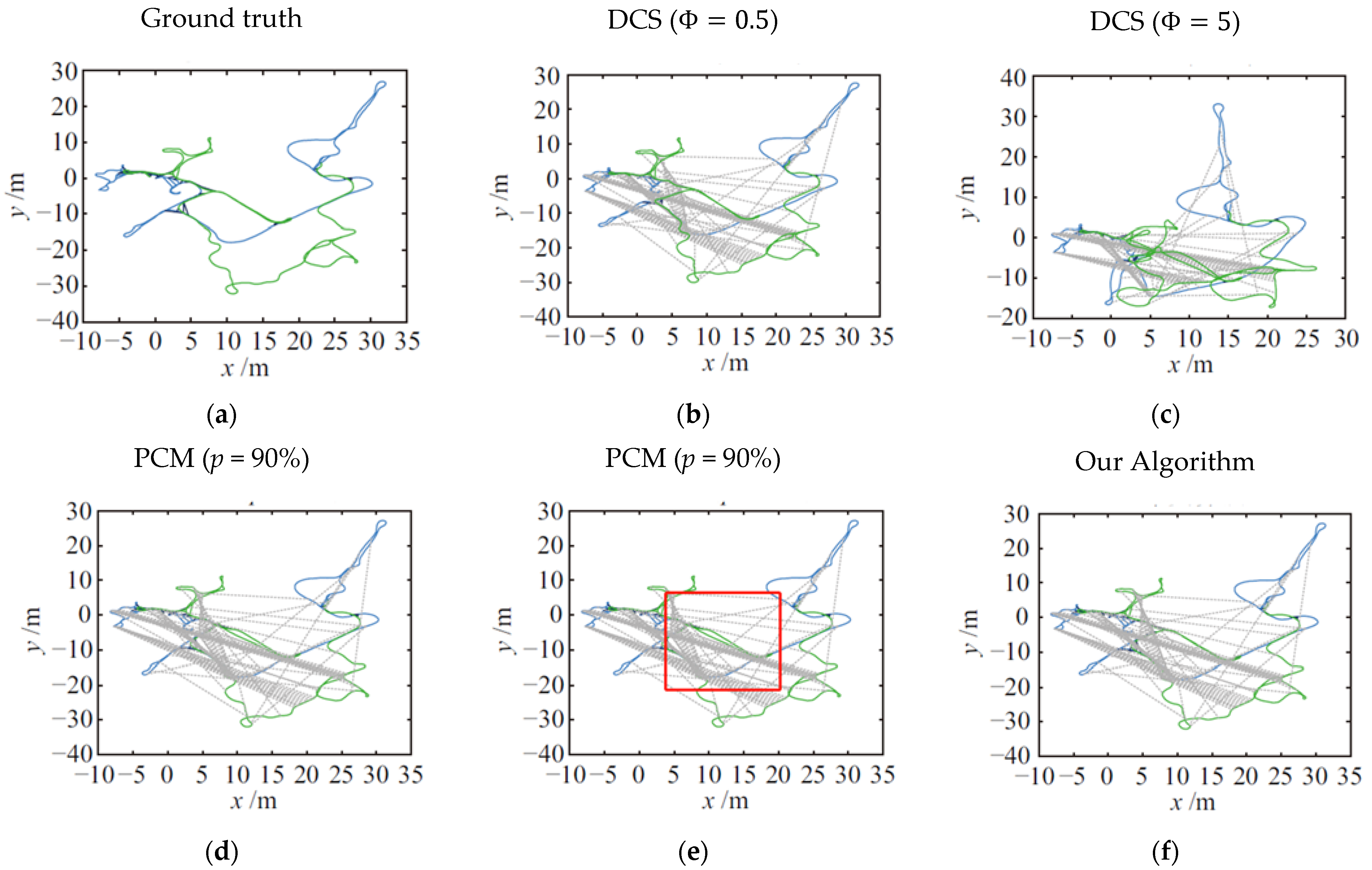
4.1. Test Using CSAIL Dataset
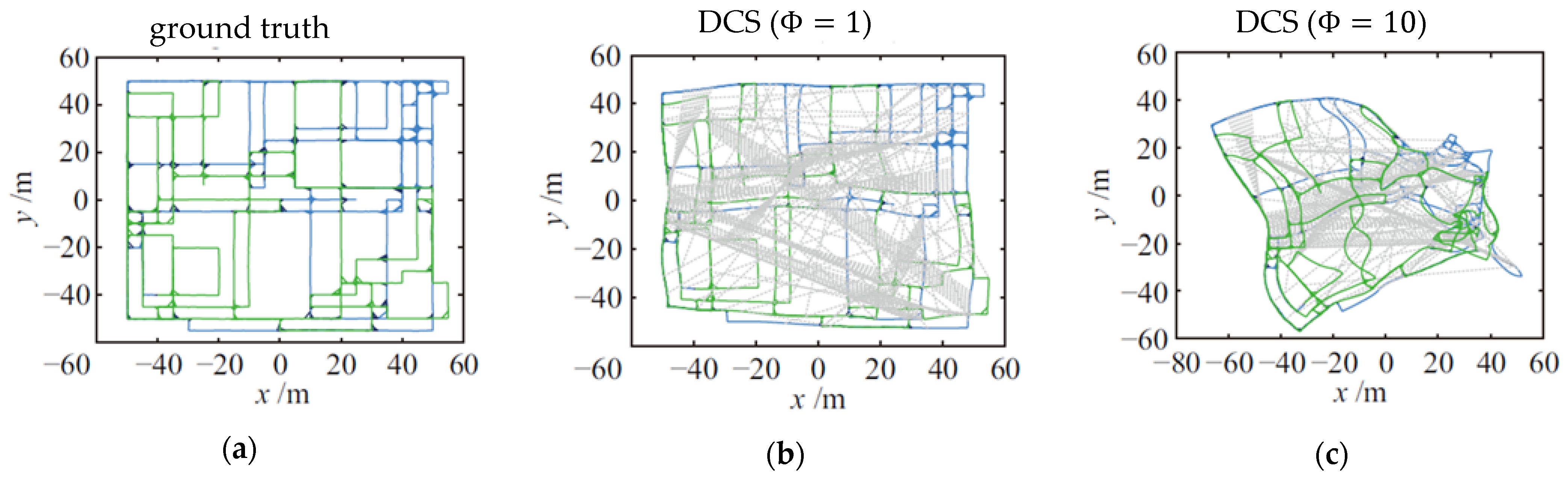
4.2. Validation Using Synthetic Data Sets
5. Conclusions and Prospects
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zou, D.; Tan, P.; Yu, W. Collaborative visual SLAM for multiple agents:A brief survey. Virtual Real. Intell. Hardw. 2019, 1, 461–482. [Google Scholar] [CrossRef]
- Yu, K.; Ahn, J.; Lee, J.; Kim, M.; Han, J. Collaborative SLAM and AR-guided navigation for floor layout inspection. Vis. Comput. 2020, 36, 2051–2063. [Google Scholar] [CrossRef]
- Ouyang, M.; Shi, X.; Wang, Y.; Tian, Y.; Shen, Y.; Wang, D.; Wang, P.; Cao, Z. A Collaborative Visual SLAM Framework for Service Robots. arXiv 2021, arXiv:2102.03228. [Google Scholar]
- G Alvez-L Opez, D.; Tard Os, J.D. Bags of Binary Words for Fast Place Recognition in Image Sequences. IEEE Trans. Robot 2012, 28, 1188–1197. [Google Scholar] [CrossRef]
- Campos, C.A.E.R. ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and Multi-Map SLAM. arXiv 2020, arXiv:2007.11898. [Google Scholar]
- Qin, T.; Pan, J.; Cao, S.; Shen, S. A General Optimization-based Framework for Local Odometry Estimation with Multiple Sensors. arXiv 2019, arXiv:1901.03638. [Google Scholar]
- Kaess, M.; Johannsson, H.; Roberts, R.; Ila, V.; Leonard, J.; Dellaert, F. iSAM2: Incremental smoothing and mapping with fluid relinearization and incremental variable reordering. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3281–3288. [Google Scholar]
- Mangelson, J.G.; Dominic, D.; Eustice, R.M.; Vasudevan, R. Pairwise Consistent Measurement Set Maximization for Robust Multi-Robot Map Merging. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 2916–2923. [Google Scholar]
- Grisetti, G.; Kümmerle, R.; Stachniss, C.; Burgard, W. A Tutorial on Graph-Based SLAM. IEEE Intell. Transp. Syst. Mag. 2010, 2, 31–43. [Google Scholar] [CrossRef]
- Prados Sesmero, C.; Villanueva Lorente, S.; Di Castro, M. Graph SLAM Built over Point Clouds Matching for Robot Localization in Tunnels. Sensors 2021, 21, 5340. [Google Scholar] [CrossRef]
- Garg, S.; Sünderhauf, N.; Dayoub, F.; Morrison, D.; Cosgun, A.; Carneiro, G.; Wu, Q.; Chin, T.; Reid, I.; Gould, S.; et al. Semantics for Robotic Mapping, Perception and Interaction: A Survey. Found. Trends Robot. 2020, 8, 1–224. [Google Scholar] [CrossRef]
- Kümmerle, R.; Grisetti, G.; Strasdat, H.; Konolige, K.; Burgard, W. G2o: A general framework for graph optimization. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3607–3613. [Google Scholar]
- Dellaert, F.; Kaess, M. Factor Graphs for Robot Perception; Now Foundations and Trends: Hanover, MA, USA, 2017; p. 154. [Google Scholar]
- Grisetti, G.; Kümmerle, R.; Stachniss, C.; Frese, U.; Hertzberg, C. Hierarchical optimization on manifolds for online 2D and 3D mapping. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 273–278. [Google Scholar]
- Tzoumas, V.; Antonante, P.; Carlone, L. Outlier-Robust Spatial Perception: Hardness, General-Purpose Algorithms, and Guarantees. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 5383–5390. [Google Scholar]
- Sünderhauf, N.; Protzel, P. Switchable constraints for robust pose graph SLAM. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 1879–1884. [Google Scholar]
- Agarwal, P.; Tipaldi, G.D.; Spinello, L.; Stachniss, C.; Burgard, W. Robust map optimization using dynamic covariance scaling. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 62–69. [Google Scholar]
- Carlone, L.; Censi, A.; Dellaert, F. Selecting good measurements via ℓ1 relaxation: A convex approach for robust estimation over graphs. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 2667–2674. [Google Scholar] [CrossRef]
- Mazuran, M.; Diego Tipaldi, G.; Spinello, L.; Burgard, W.; Stachniss, C. A statistical measure for map consistency in SLAM. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 3650–3655. [Google Scholar]
- Lajoie, P.; Ramtoula, B.; Chang, Y.; Carlone, L.; Beltrame, G. DOOR-SLAM: Distributed, Online, and Outlier Resilient SLAM for Robotic Teams. IEEE Robot. Autom. Lett. 2020, 5, 1656–1663. [Google Scholar] [CrossRef] [Green Version]
- Wu, F.; Beltrame, G. Cluster-based Penalty Scaling for Robust Pose Graph Optimization. IEEE Robot. Autom. Lett. 2020, 5, 6193–6200. [Google Scholar] [CrossRef]
- Latif, Y.; Cadena, C.; Neira, J. Robust loop closing over time for pose graph SLAM. Int. J. Robot. Res. 2013, 32, 1611–1626. [Google Scholar] [CrossRef]
- Neira, J.; Tardos, J.D. Data association in stochastic mapping using the joint compatibility test. IEEE Trans. Robot. Autom. 2001, 17, 890–897. [Google Scholar] [CrossRef] [Green Version]
- Lajoie, P.; Hu, S.; Beltrame, G.; Carlone, L. Modeling Perceptual Aliasing in SLAM via Discrete–Continuous Graphical Models. IEEE Robot. Autom. Lett. 2019, 4, 1232–1239. [Google Scholar] [CrossRef] [Green Version]
- Chang, Y.; Tian, Y.; How, J.P.; Carlone, L. Kimera-Multi: A System for Distributed Multi-Robot Metric-Semantic Simultaneous Localization and Mapping. arXiv 2020, arXiv:2106.14386. [Google Scholar]
- Rosinol, A.; Abate, M.; Chang, Y.; Carlone, L. Kimera: An Open-Source Library for Real-Time Metric-Semantic Localization and Mapping. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 1689–1696. [Google Scholar]
- Do, H.; Hong, S.; Kim, J. Robust Loop Closure Method for Multi-Robot Map Fusion by Integration of Consistency and Data Similarity. IEEE Robot. Autom. Lett. 2020, 5, 5701–5708. [Google Scholar] [CrossRef]
- Dong, J.; Nelson, E.; Indelman, V.; Michael, N.; Dellaert, F. Distributed real-time cooperative localization and mapping using an uncertainty-aware expectation maximization approach. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5807–5814. [Google Scholar]
- Kim, B.; Kaess, M.; Fletcher, L.; Leonard, J.; Bachrach, A.; Roy, N.; Teller, S. Multiple relative pose graphs for robust cooperative mapping. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 3185–3192. [Google Scholar]
- Smith, R.; Self, M.; Cheeseman, P. Estimating Uncertain Spatial Relationships in Robotics. In Proceedings of the 1987 IEEE International Conference on Robotics and Automation, Raleigh, NC, USA, 31 March–3 April 1987. [Google Scholar]
- Wu, Q.; Hao, J. A review on algorithms for maximum clique problems. Eur. J. Oper. Res. 2015, 242, 693–709. [Google Scholar] [CrossRef]
- Bomze, I.M.; Budinich, M.; Pardalos, P.M.; Pelillo, M. The maximum clique problem. In Handbook of Combinatorial Optimization; Springer: Berlin/Heidelberg, Germany, 1999; pp. 1–74. [Google Scholar]
- Pattabiraman, B.; Patwary, M.M.A.; Gebremedhin, A.H.; Liao, W.; Choudhary, A. Fast Algorithms for the Maximum Clique Problem on Massive Graphs with Applications to Overlapping Community Detection. Internet Math. 2015, 11, 421–448. [Google Scholar] [CrossRef] [Green Version]
- Carlone, L.; Aragues, R.; Castellanos, J.A.; Bona, B. A fast and accurate approximation for planar pose graph optimization. Int. J. Robot. Res. 2014, 33, 965–987. [Google Scholar] [CrossRef]
- Kaess, M.; Ranganathan, A.; Dellaert, F. iSAM: Incremental Smoothing and Mapping. IEEE Trans. Robot. 2008, 24, 1365–1378. [Google Scholar] [CrossRef]
- Schmuck, P.; Chli, M. CCM-SLAM: Robust and efficient centralized collaborative monocular simultaneous localization and mapping for robotic teams. J. Field Robot. 2018, 36, 763–781. [Google Scholar] [CrossRef] [Green Version]
- Karrer, M.; Schmuck, P.; Chli, M. CVI-SLAM—Collaborative Visual-Inertial SLAM. IEEE Robot. Autom. Lett. 2018, 3, 2762–2769. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Configuration |
| CPU | Intel i5-8250U@3.400 GHz |
| Memory | 32 GB |
| OS | Ubuntu 18.04 |
| Software environment | VSCode, GTSAM4.0.3 |
| ATE/m | ARE/rad | |
|---|---|---|
| Initial value | 1.792 | 0.082 |
| DCS (Φ = 0.5) | 0.186 | 0.022 |
| DCS (Φ = 5) | 14.787 | 0.673 |
| PCM (p = 90%) | 1.348 | 0.198 |
| Our algorithm (p = 90%) | 0.095 | 0.008 |
| ATE/m | ARE/rad | |
|---|---|---|
| Initial value | 15.266 | 0.276 |
| DCS (Φ = 1) | 5.688 | 0.149 |
| DCS (Φ = 10) | 34.715 | 1.067 |
| PCM (p = 90%) | 1.094 | 0.145 |
| Our algorithm (p = 90%) | 0.126 | 0.004 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Zhang, Z.; Wang, Q.; Yang, Y. Using a Two-Stage Method to Reject False Loop Closures and Improve the Accuracy of Collaborative SLAM Systems. Electronics 2021, 10, 2638. https://doi.org/10.3390/electronics10212638
Zhang X, Zhang Z, Wang Q, Yang Y. Using a Two-Stage Method to Reject False Loop Closures and Improve the Accuracy of Collaborative SLAM Systems. Electronics. 2021; 10(21):2638. https://doi.org/10.3390/electronics10212638
Chicago/Turabian StyleZhang, Xiaoguo, Zihan Zhang, Qing Wang, and Yuan Yang. 2021. "Using a Two-Stage Method to Reject False Loop Closures and Improve the Accuracy of Collaborative SLAM Systems" Electronics 10, no. 21: 2638. https://doi.org/10.3390/electronics10212638
APA StyleZhang, X., Zhang, Z., Wang, Q., & Yang, Y. (2021). Using a Two-Stage Method to Reject False Loop Closures and Improve the Accuracy of Collaborative SLAM Systems. Electronics, 10(21), 2638. https://doi.org/10.3390/electronics10212638