
Modeling and Control of a Phase-Shifted Full-Bridge Converter for a LiFePO4 Battery Charger


 ,
,  and
and
Abstract
:1. Introduction
2. Theoretical Background
2.1. DC-DC Converters
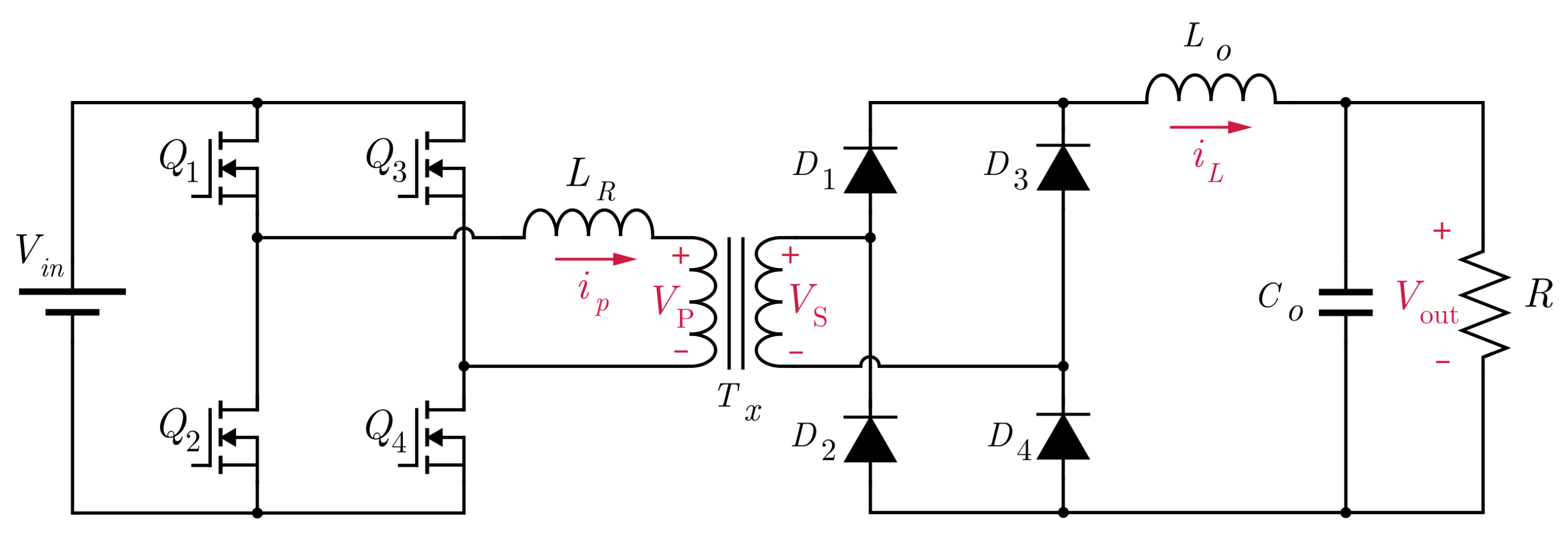
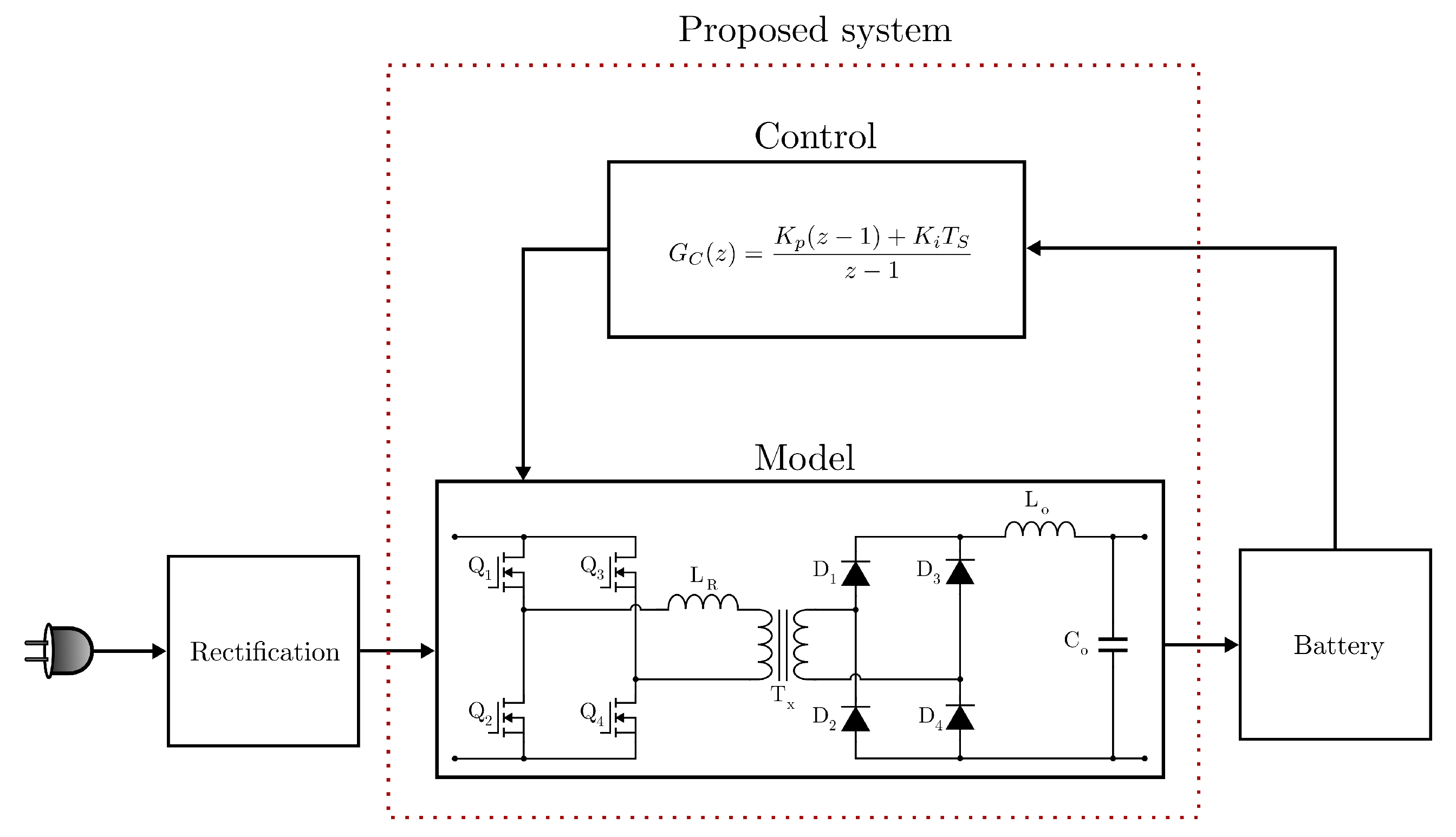
2.2. PSFB Converter
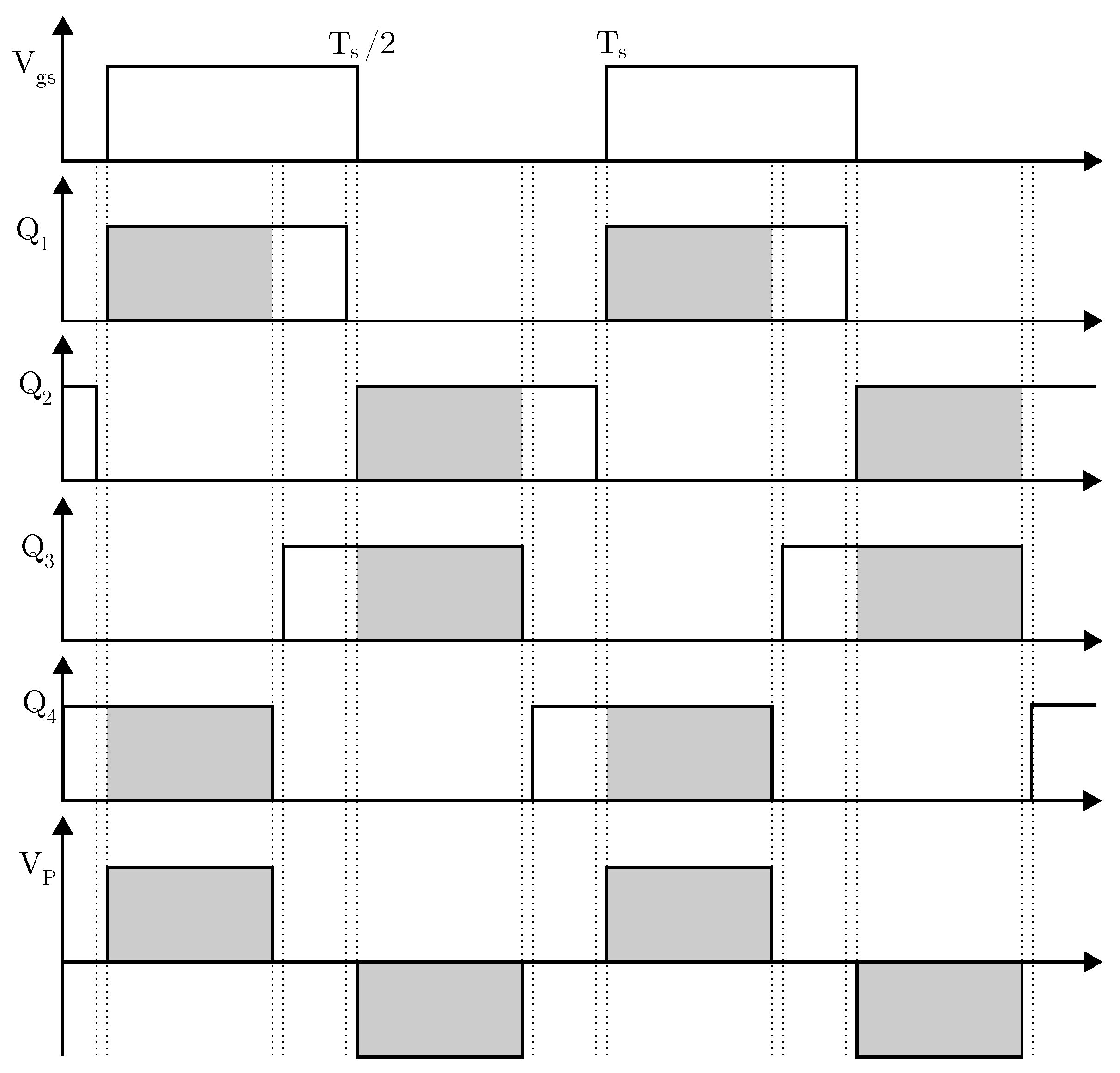
2.3. Principle of Operation
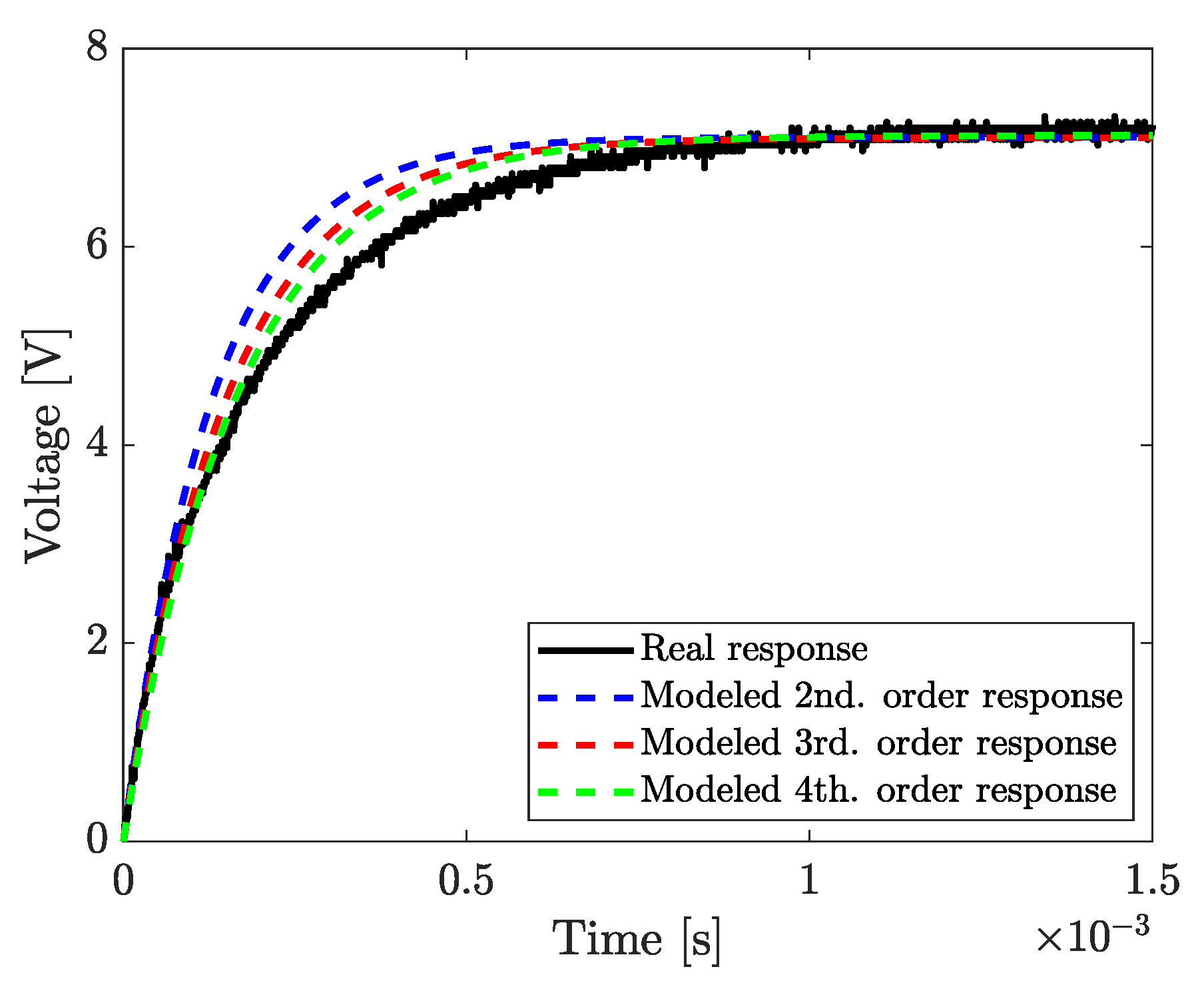
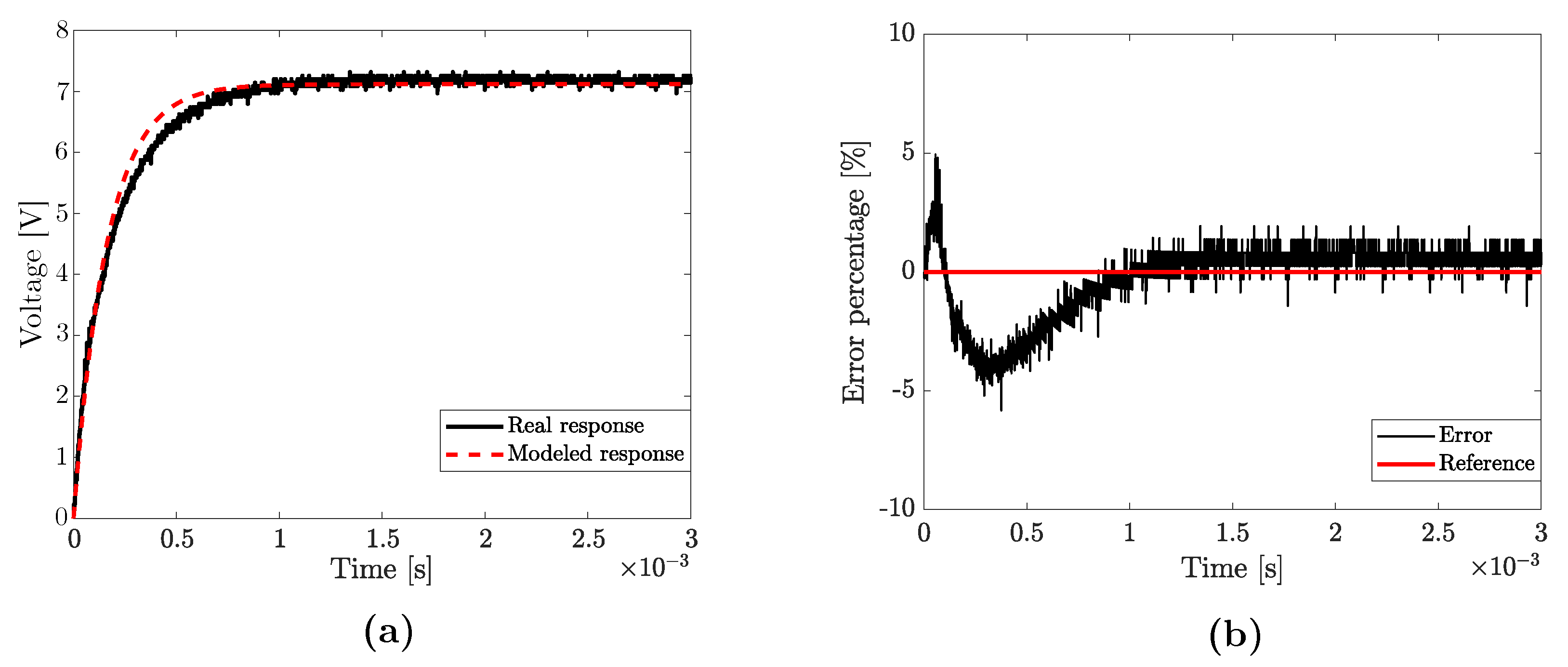
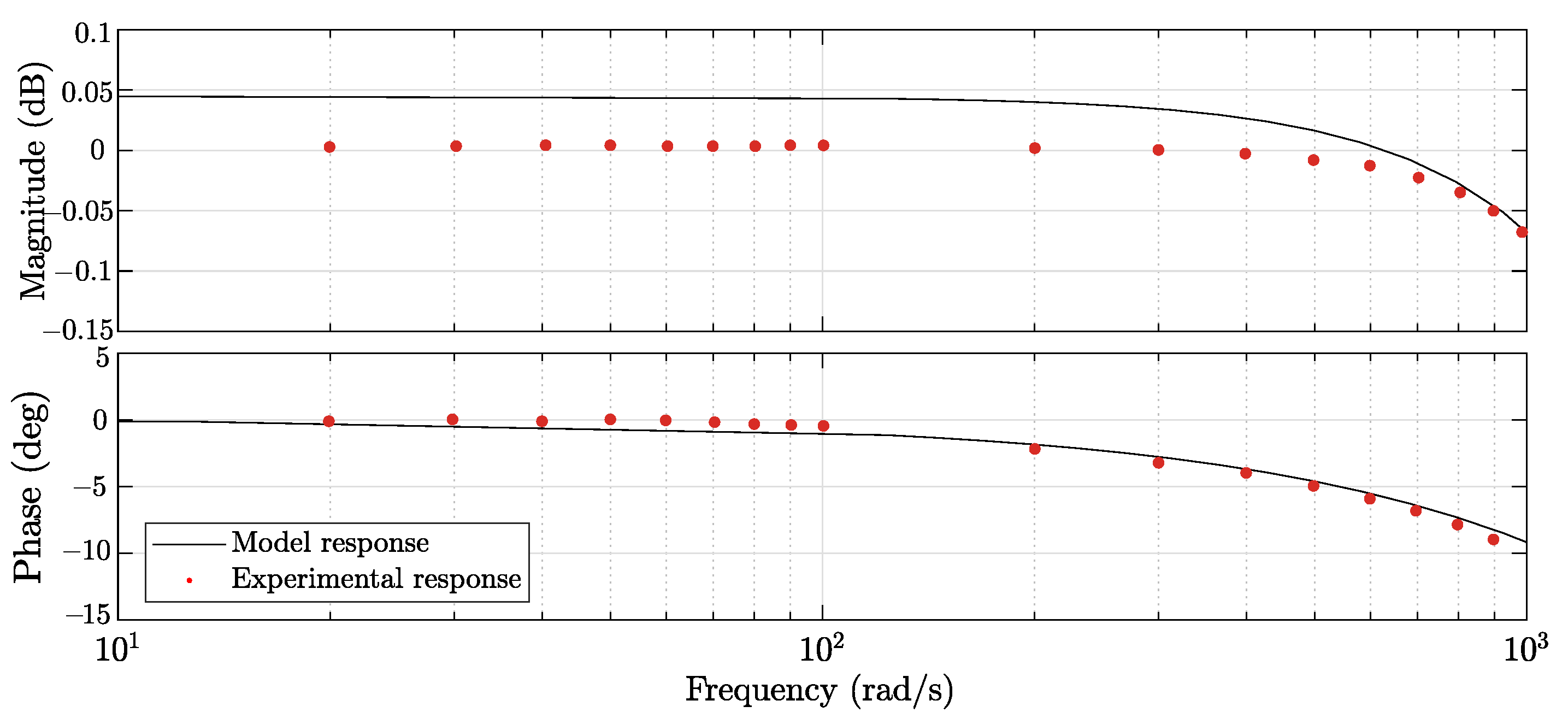
2.4. Plant Modeling
2.5. Least Squares Method for Estimating Parameters of the ARX Model
3. Methodology
3.1. Converter Efficiency
3.1.1. Transformer
3.1.2. MOSFETs
3.1.3. Diodes
3.1.4. Inductor
3.1.5. Capacitor
3.1.6. Total Losses
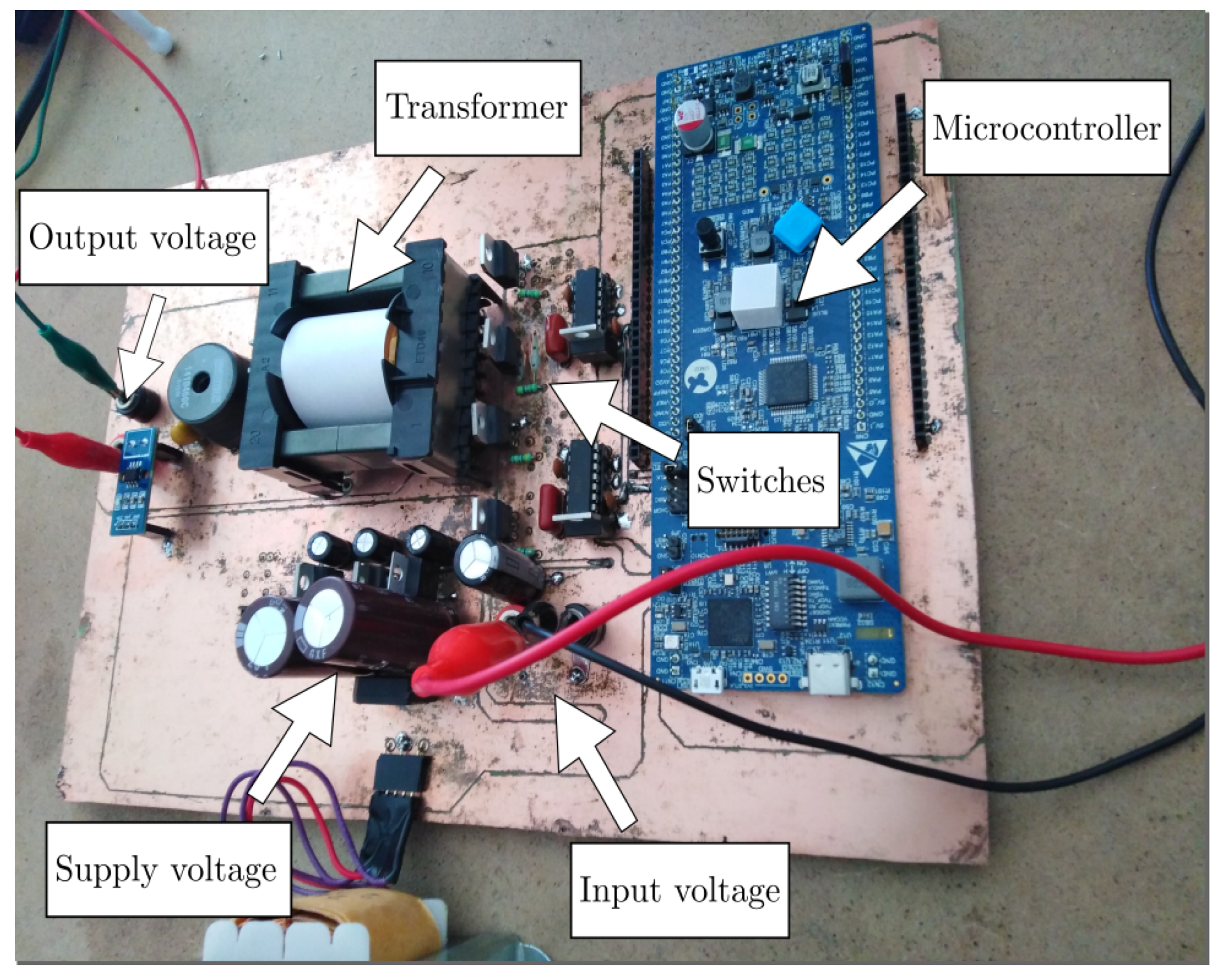
3.2. Model Implementation
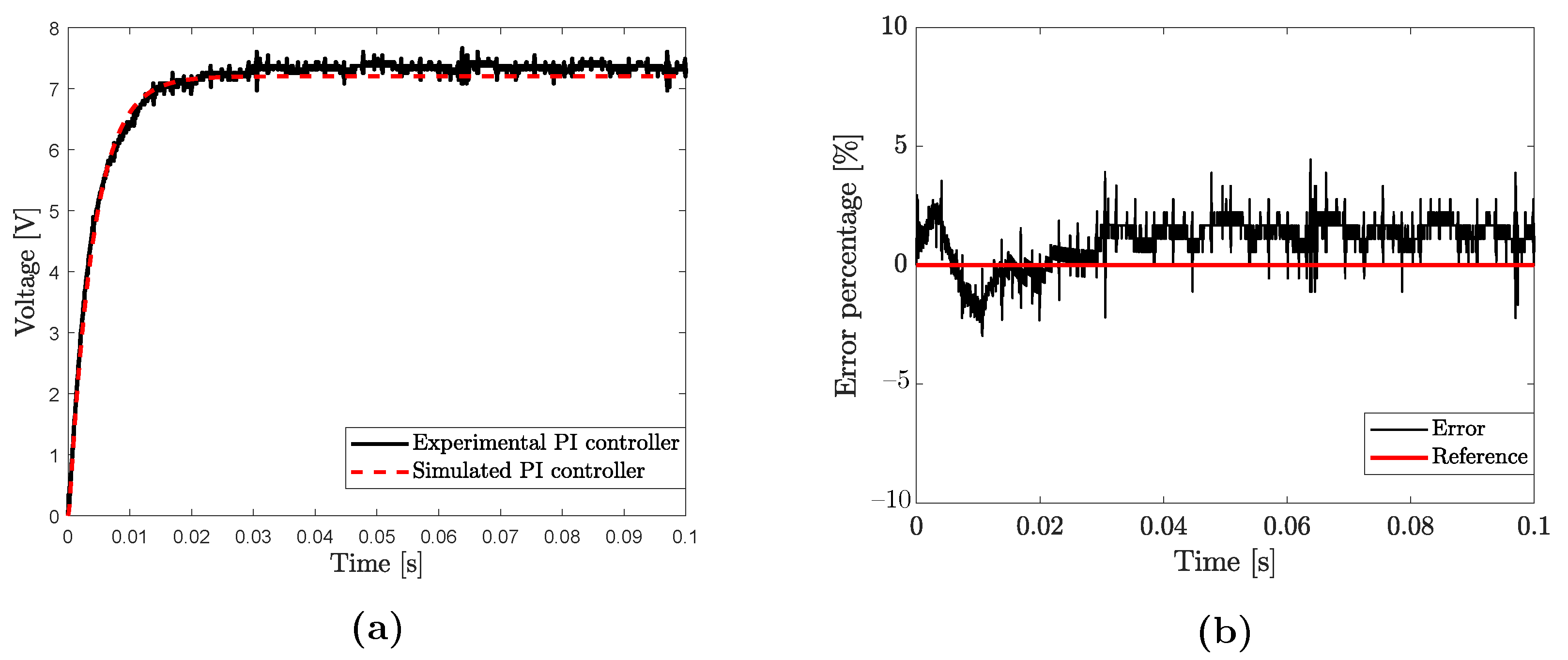
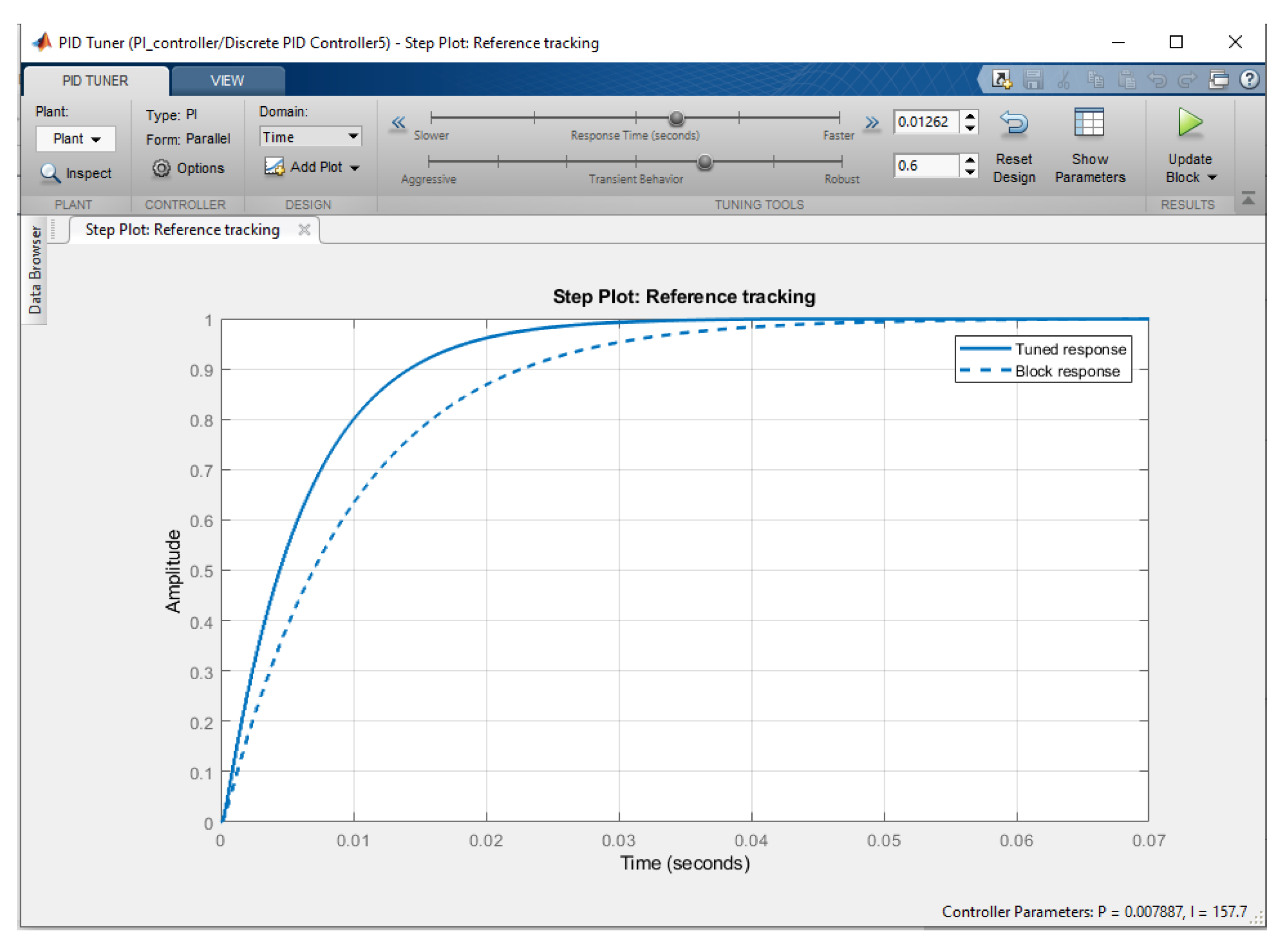
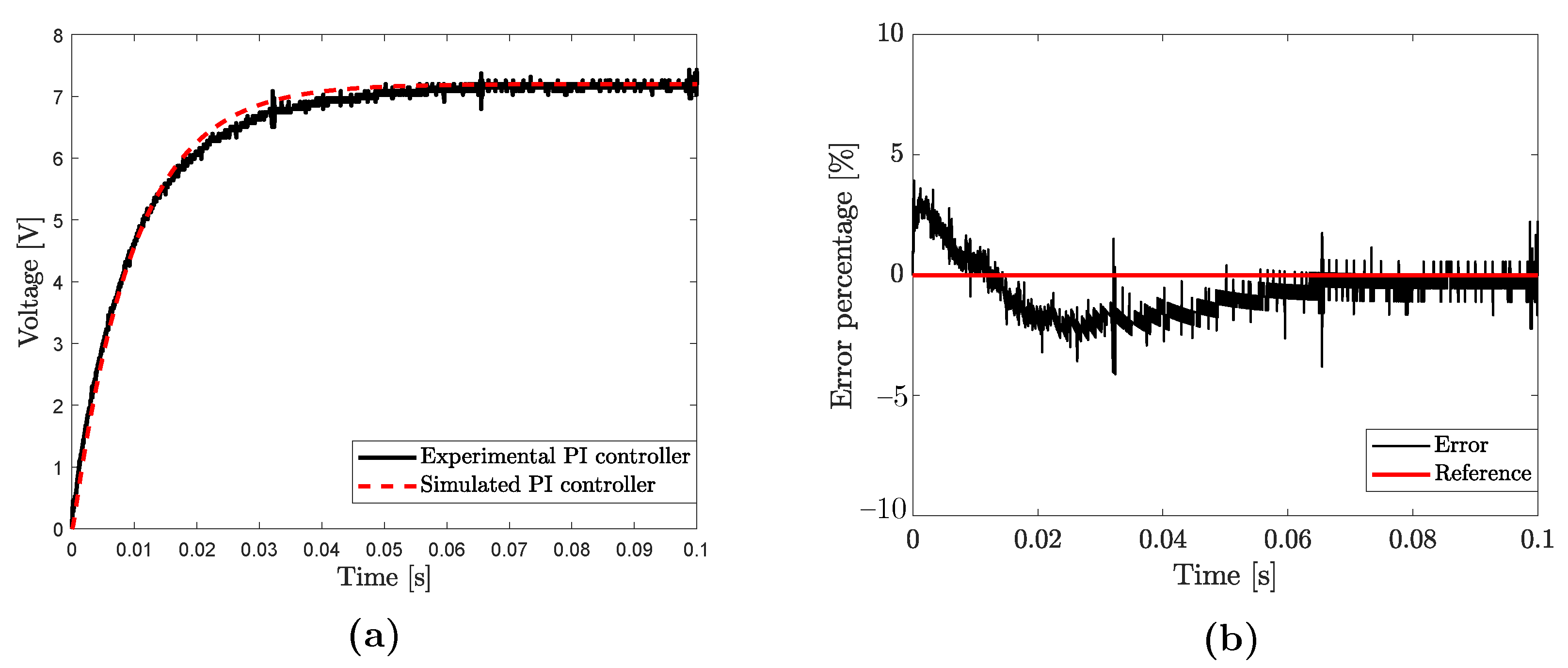
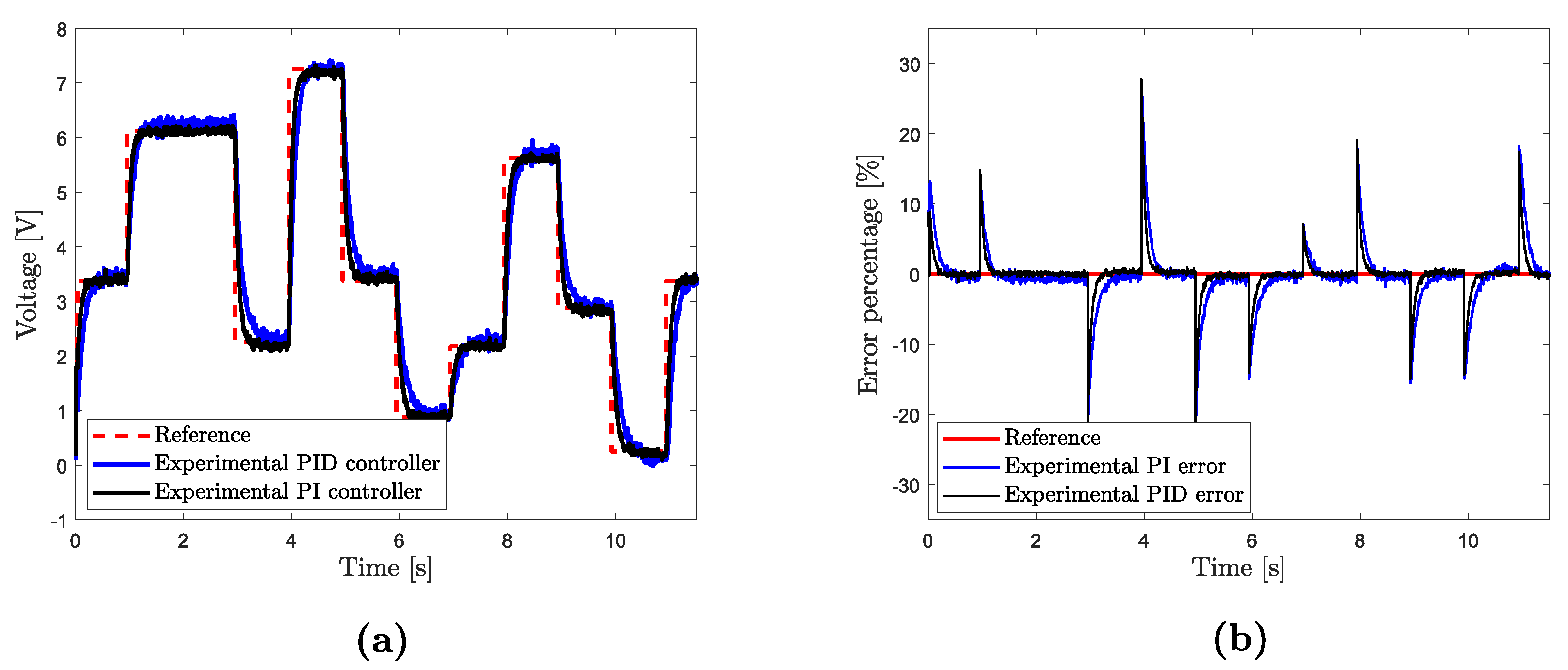
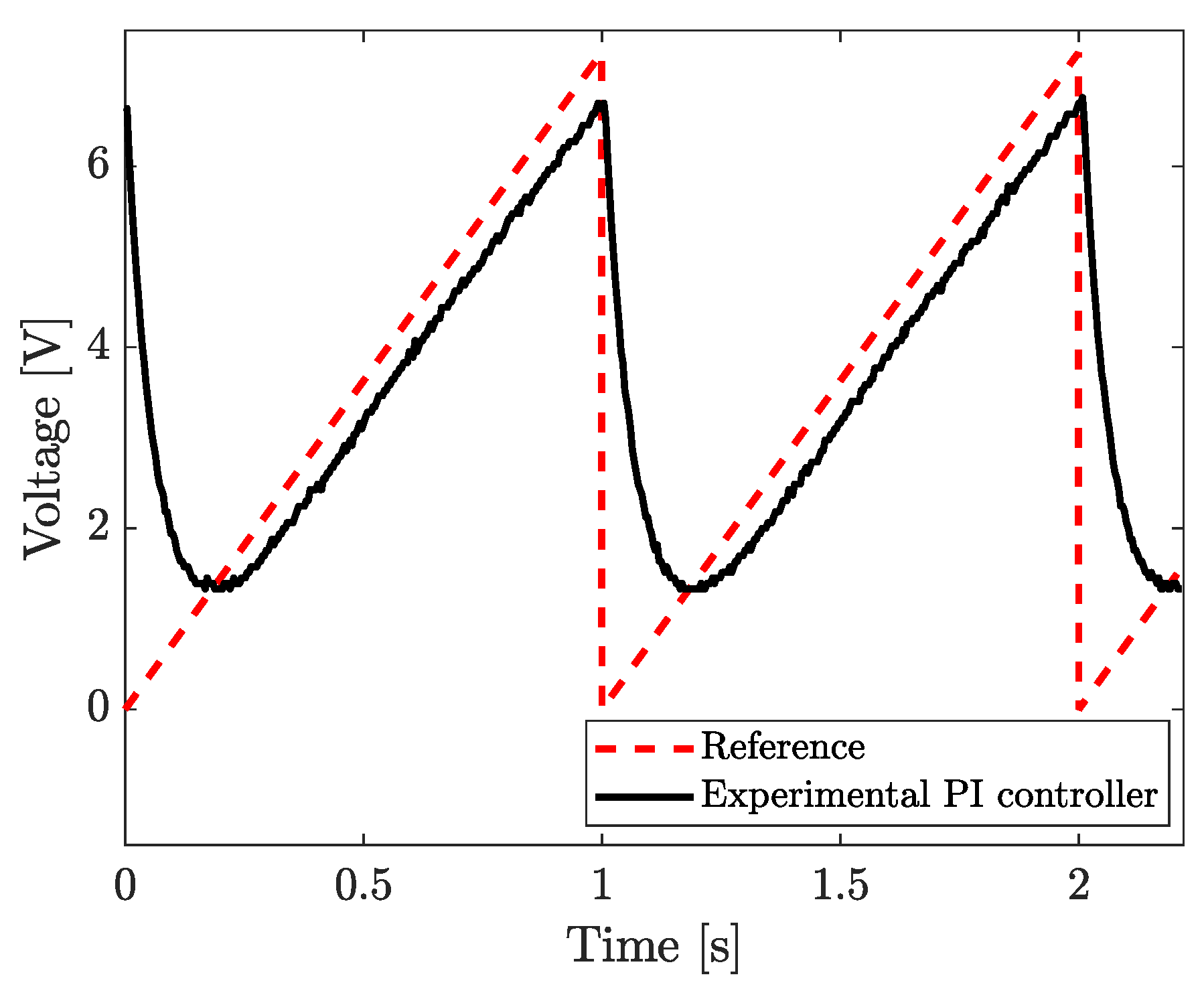
3.3. Voltage Control
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Instituto Nacional de Estadística y Geografía. Registro Administrativo de la Industria Automotriz de Vehículos Ligeros; Instituto Nacional de Estadística y Geografía: Aguascalientes City, Mexico, 2020.
- Solaymani, S. CO2 emissions patterns in 7 top carbon emitter economies: The case of transport sector. Energy 2019, 168, 989–1001. [Google Scholar] [CrossRef]
- Wang, J.; Sun, X. Understanding and recent development of carbon coating on LiFePO4 cathode materials for lithium-ion batteries. Energy Environ. Sci. 2012, 5, 5163–5185. [Google Scholar] [CrossRef]
- Scrosati, B.; Garche, J. Lithium batteries: Status, prospects and future. J. Power Sources 2010, 195, 2419–2430. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Review of Battery Charger Topologies, Charging Power Levels, and Infrastructure for Plug-In Electric and Hybrid Vehicles. IEEE Trans. Power Electron. 2013, 28, 2151–2169. [Google Scholar] [CrossRef]
- Khaligh, A.; D’Antonio, M. Global Trends in High-Power On-Board Chargers for Electric Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 3306–3324. [Google Scholar] [CrossRef]
- Kumar, D.; Nema, R.K.; Gupta, S. A comparative review on power conversion topologies and energy storage system for electric vehicles. Int. J. Energy Res. 2020, 44, 7863–7885. [Google Scholar] [CrossRef]
- Choudhury, T.; Nayak, B.; De, A. A comprehensive review and feasibility study of DC–DC converters for different PV applications: ESS, future residential purpose, EV charging. Energy Syst. 2020, 11, 641–671. [Google Scholar] [CrossRef]
- Lee, J.; Kim, J.M.; Yi, J.; Won, C.Y. Battery Management System Algorithm for Energy Storage Systems Considering Battery Efficiency. Electronics 2021, 10, 1859. [Google Scholar] [CrossRef]
- Ortega, M.; Jurado, F.; Vera, D. Novel topology for DC-DC full-bridge unidirectional converter for renewable energies. IEEE Latin Am. Trans. 2014, 12, 1381–1388. [Google Scholar] [CrossRef]
- Phan, N.T.; Nguyen, A.D.; Liu, Y.C.; Chiu, H.J. An Investigation of Zero-Voltage-Switching Condition in a High-Voltage-Gain Bidirectional DC–DC Converter. Electronics 2021, 10, 1940. [Google Scholar] [CrossRef]
- Cho, Y.; Jang, P. Analysis and Design for Output Voltage Regulation in Constant-on-Time-Controlled Fly-Buck Converter. Electronics 2021, 10, 1886. [Google Scholar] [CrossRef]
- Oh, C.; Kim, D.; Woo, D.; Sung, W.; Kim, Y.; Lee, B. A High-Efficient Nonisolated Single-Stage On-Board Battery Charger for Electric Vehicles. IEEE Trans. Power Electron. 2013, 28, 5746–5757. [Google Scholar] [CrossRef]
- Whitaker, B.; Barkley, A.; Cole, Z.; Passmore, B.; Martin, D.; McNutt, T.R.; Lostetter, A.B.; Lee, J.S.; Shiozaki, K. A High-Density, High-Efficiency, Isolated On-Board Vehicle Battery Charger Utilizing Silicon Carbide Power Devices. IEEE Trans. Power Electron. 2014, 29, 2606–2617. [Google Scholar] [CrossRef]
- Bosso, J.E.; Oggier, G.G.; Garcia, G.O. Isolated Buck/Boost Bidirectional DC-Three Phase Topology. IEEE Latin Am. Trans. 2016, 14, 2669–2674. [Google Scholar] [CrossRef]
- Akter, P.; Uddin, M.; Mekhilef, S.; Tan, N.M.L.; Akagi, H. Model predictive control of bidirectional isolated DC–DC converter for energy conversion system. Int. J. Electron. 2015, 102, 1407–1427. [Google Scholar] [CrossRef] [Green Version]
- Al-Haj Hussein, A.; Batarseh, I. A Review of Charging Algorithms for Nickel and Lithium Battery Chargers. IEEE Trans. Veh. Technol. 2011, 60, 830–838. [Google Scholar] [CrossRef]
- Jadli, U.; Mohd-Yasin, F.; Moghadam, H.A.; Pande, P.; Chaturvedi, M.; Dimitrijev, S. A Method for Selection of Power MOSFETs to Minimize Power Dissipation. Electronics 2021, 10, 2150. [Google Scholar] [CrossRef]
- Lopez, J.C.; Ortega, M.; Jurado, F. New topology for DC/DC bidirectional converter for hybrid systems in renewable energy. Int. J. Electron. 2015, 102, 418–432. [Google Scholar] [CrossRef]
- Chou, H.H.; Chen, H.L.; Fan, Y.H.; Wang, S.F. Adaptive On-Time Control Buck Converter with a Novel Virtual Inductor Current Circuit. Electronics 2021, 10, 2143. [Google Scholar] [CrossRef]
- Kim, H.Y.; Kim, T.U.; Choi, H.Y. A Two-Channel High-Performance DC-DC Converter for Mobile AMOLED Display Based on the PWM–SPWM Dual-Mode Switching Method. Electronics 2021, 10, 2059. [Google Scholar] [CrossRef]
- Ruan, X. Soft-Switching PWM Full-Bridge Converters; John Wiley and Sons Singapore Pte. Ltd.: Singapore, 2014. [Google Scholar]
- Di Capua, G.; Shirsavar, S.A.; Hallworth, M.A.; Femia, N. An Enhanced Model for Small-Signal Analysis of the Phase-Shifted Full-Bridge Converter. IEEE Trans. Power Electron. 2015, 30, 1567–1576. [Google Scholar] [CrossRef]
- Tomesc, L.; Betea, B.; Dobra, P. Determining the Frequency Response of a DC-DC Converter thru System Identification. IFAC Proc. Vol. 2013, 46, 149–152. [Google Scholar] [CrossRef]
- Amran, M.; Bakar, A.; Jalil, M.; Wahyu, M.; Gani, A. Simulation and modeling of two-level DC/DC boost converter using ARX, ARMAX, and OE model structures. Indones. J. Electr. Eng. Comput. Sci. 2020, 18, 1172–1179. [Google Scholar] [CrossRef]
- O’Loughlin, M. Phase-Shifted, Full-Bridge Application Report; Technical Report SLUA560C; Texas Instruments: Dallas, TX, USA, 2011. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Converter | Voltage Stressof Switches | Current Stressof Switches | Switches | Frequency |
|---|---|---|---|---|
| Simple forward | 2 | 1 | ||
| Double forward | 2 | |||
| Push–pull | 2 | 2 | 2 | |
| Half bridge | 2 | 2 | ||
| PSFB | 4 | 2 |
| Identification Method | System to Be Modeled | Verification Method | Reference |
|---|---|---|---|
| Proposed dynamic model | PSFB Converter | Experimental | [23] |
| ARX model | Buck converter | Residual autocorrelation | [24] |
| ARX, ARMAX, OE model | Two level boost converter | Simulation | [25] |
| Component | Type |
|---|---|
| Microcontroller | B-G474E-DPOW1 |
| Output inductor | 100 µH |
| Output capacitor | 3000 µF |
| Ferrite core | ETD49 |
| MOSFET | STP36N55M5 |
| Diode | RHRP3060 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mendoza-Varela, I.A.; Alvarez-Diazcomas, A.; Rodriguez-Resendiz, J.; Martinez-Prado, M.A. Modeling and Control of a Phase-Shifted Full-Bridge Converter for a LiFePO4 Battery Charger. Electronics 2021, 10, 2568. https://doi.org/10.3390/electronics10212568
Mendoza-Varela IA, Alvarez-Diazcomas A, Rodriguez-Resendiz J, Martinez-Prado MA. Modeling and Control of a Phase-Shifted Full-Bridge Converter for a LiFePO4 Battery Charger. Electronics. 2021; 10(21):2568. https://doi.org/10.3390/electronics10212568
Chicago/Turabian StyleMendoza-Varela, Ivan A., Alfredo Alvarez-Diazcomas, Juvenal Rodriguez-Resendiz, and Miguel Angel Martinez-Prado. 2021. "Modeling and Control of a Phase-Shifted Full-Bridge Converter for a LiFePO4 Battery Charger" Electronics 10, no. 21: 2568. https://doi.org/10.3390/electronics10212568
APA StyleMendoza-Varela, I. A., Alvarez-Diazcomas, A., Rodriguez-Resendiz, J., & Martinez-Prado, M. A. (2021). Modeling and Control of a Phase-Shifted Full-Bridge Converter for a LiFePO4 Battery Charger. Electronics, 10(21), 2568. https://doi.org/10.3390/electronics10212568